基于ROS的智能代步车嵌入式运动控制系统
基于ROS的智能代步车嵌入式运动控制系统
摘要:针对目前智能代步车运动控制系统功耗高、体积大和开发成本高和工作量大等不足,提出一种基于机器人操作系统(Robot Operating System,ROS)的智能代步车嵌入式运动控制系统。该运动控制系统将ROS移植到arm嵌入式板卡,将arm作为中央处理器,运用ROS中的导航功能包实现智能代步车的地图建立、路径
规划、室内外自主导航、运动控制等功能,最后通过仿真实验验证了该运动控制系统的可行性。
关键词:机器人操作系统;智能代步车;嵌入式运功控制系统
中图分类号:TP311 文献标识码:A
文章编号:2096-1472(2016)-06-48-03
Abstract:In view of some outstanding problems of intelligent electronic scooters,such as the high power consumption,the huge size,the high development costs and heavy workload,the paper proposes an embedded motion control system based on the Robot Operating System(ROS)for intelligent electronic scooters the ROS was ported to the arm embedded board which is used as the central processor in the embedded motion control system.Functions like map building,
route planning,indoor and outdoor autonomous navigation and motion control are implemented through the ROS navigation function package.At the end of the paper,the feasibility of the motion control system is verified through the simulation experiments.
Keywords:ROS;intelligent electronic scooters;embedded motion
control systems
1 引言(Introduction)
随着社会的发展和人类文明程度的提高,人们特别是残疾人愈来愈需要运用现代高新技术来改善他们的生活质量
和生活自由度。智能代步车的出现提高了老年人和残障人士的行动自由度,受到了社会的普遍关注,将机器人技术[1-4]应用于智能代步车提高智能代步车的智能化、安全化、实用化程度具有广泛的应用前景。然而,机器人技术的复杂性和多任务性给智能代步车运动控制系统程序的编写带来很大
的困难。传统的智能代步车运动控制系统都是开发者单独设计,在不同的平台间移植需要很大的工作量。机器人操作系统[5,6](Robot Operating System,ROS)起源于2007年斯坦福大学人工智能实验室与机器人技术公司的项目合作, ROS是一种分布式处理架构,为机器人系统的开发提供了一个很好的框架,拥有用于机器人的各种功能包,这些功能包单独设计,在运行时松散耦合,提高了代码复用率。
控制系统作为智能代步车的核心部分,其性能好坏和开发周期直接决定着智能代步车的智能化程度、安全性能和使用成本,如何简单快速地为智能代步车构建运动控制系统是一个值得深入研究的问题。本文针对智能代步车提出了一种基于ROS 的嵌入式运动控制系统,应用ROS提供的功能包实现智能代步车的定位、导航与控制。
2 运动控制系统硬件设计(Hardware design of motion control system)
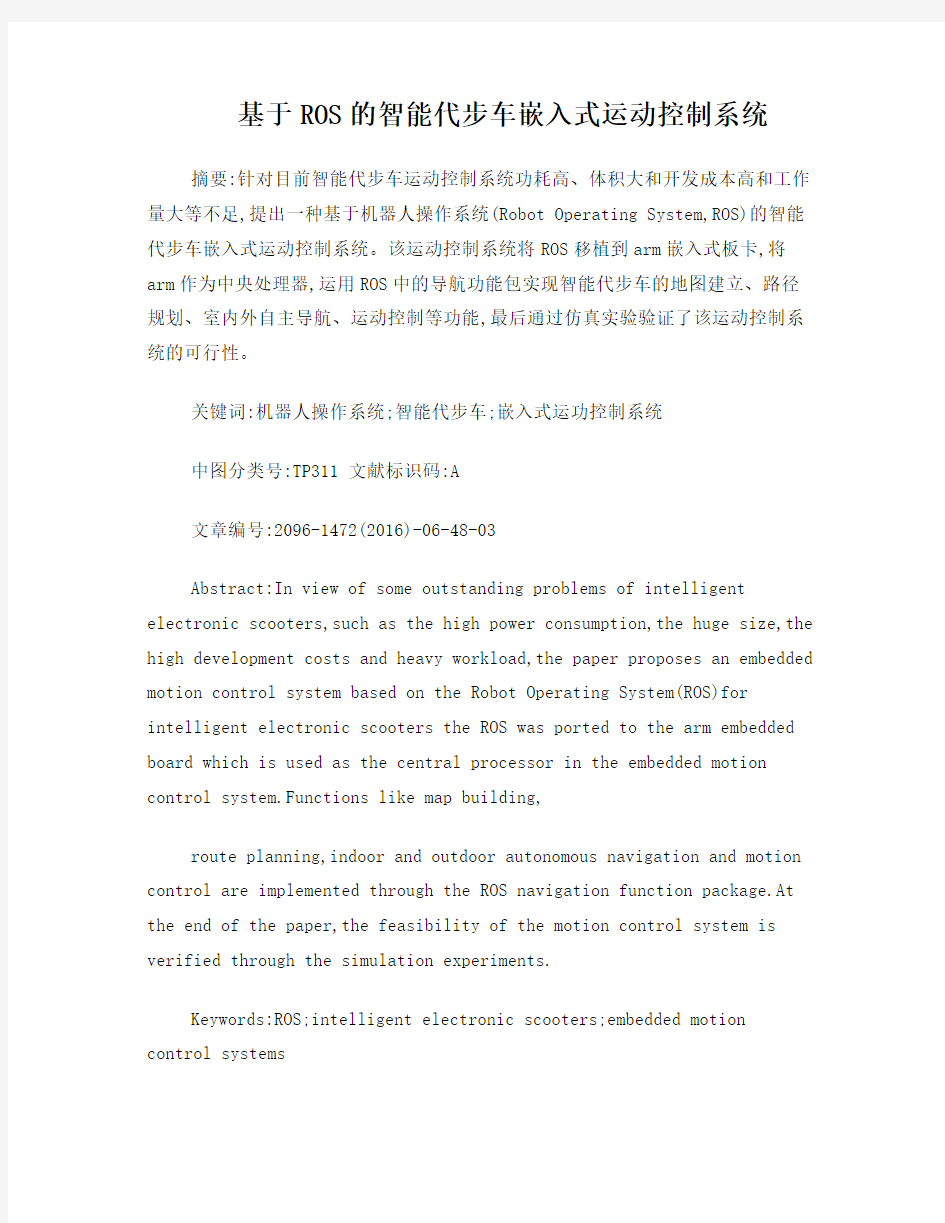
智能代步车本体为电动轮椅车,在此基础上进行改装,增加必要的传感器和嵌入式arm开发板,针对不同的任务需求,在智能代步车本体上安装相应的传感器,如图1所示。
智能代步车的底盘为两轮驱动结构,两个驱动轮安装于车体后方,采用两轮差速驱动的方式实现智能代步车的运动。驱动轮连接的电机配有两个采集驱动轮滚动的圈数的光电
编码器,可实现对智能代步车运行里程的计算。车体前方装有万向轮用来控制智能代步车的运动方向,装有hokuyo激
光测距仪检测障碍物与智能代步车的距离。智能代步车选用的定位传感器为Stargazer和gps,选用的CPU模块为飞思卡尔imx6q,选用的底层操作系统为ubuntu armhf系统和ROS。
3 运动控制系统软件设计(Software design of motion control system)
在构建运动控制系统软件构架时,既要确保控制系统的
高性能,还要保证控制系统易于扩展和维护,更要与ROS系统软件体系结构相融合。智能代步车软件系统按程序实现流程划分,主要分为人机交互层、决策层、控制层、感知层,各层间相互关系如图2所示。
智能代步车任务实现流程主要分为三个环节:
(1)用户通过人机交互层将任务传达给智能代步车。
(2)决策层通过感知层传达的数据信息确定机器人所处的外部环境状态和代步车的运动状态,并据此做出决策。
(3)依据决策结果,由驱动层选择合适的控制策略,实现预定的工作任务。
任务执行过程中,内传感器实现对智能代步车运动状态的描述,外传感器感知外部工作环境信息。感知层将所获取的智能代步车运动状态及工作环境状态反馈给系统决策层
并作为决策依据。从图2中可知,人机交互系统与决策系统之间存在双向信息传播。一方面,操作者通过人机交互层向智能代步车传送任务命令;另一方面,决策层实时向人机交互层传送智能代步车运行状态及外部工作环境状态,并通过可视化技术在人机交互界面上显示。在决策层与驱动层之间同样存在双向信息传递:决策层把决策结果传递给驱动层,作为驱动层运行的依据;同时,驱动层将把执行的结果反馈给决策层,供决策系统参考并做出相应调整。 3.1 人机交互层
人机交互层与决策层通过以太网连接,可显示决策层建立的室内地图和规划的路径。人机交互层的操作界面为一台平板电脑,可实时监控显示智能代步车的运行位置和运行状态,用户可通过触屏的方式向智能代步车发送运动控制指令和导航指令,比如用户可以通过人机交互层设定智能代步车的起始点、目标点位置,系统会将该指令通过以太网传输给决策层,决策层经过计算处理后得出路径导航规划方案,以实现对智能代步车的控制。当出现紧急情况时,用户可通过人机交互层及时介入系统导航决策过程,以避免危险事故的发生。图3为导航过程在人机交互层的显示。
3.2 决策层
决策层为飞思卡尔imx6q开发板,软件开发系统环境为ubuntu armhf系统、ROS系统,主要实现功能包括建立地图、自主导航和运动控制[7-9]。当智能代步车处于地图创建模式时,决策层调用ROS中的gmapping功能包,通过手动控制模式控制智能代步车在未知环境中移动,在移动过程中根据位置估计和地图进行自身定位,在自身定位的基础上创建SLAM栅格地图,并将地图信息发布给人机交互层显示;当智能代步车处于运动控制模式时,决策层从人机交互层读取运动控制指令,并通过话题“cmd_vel”发布出去;当智能代步车处于自主导航模式时,决策层调用ROS中navigation功能包,并接收感知层采集到的传感器信息,经过一系列计算,
输出智能代步车的速度并通过cmd_vel”发布出去[9]。
决策层中的运动学模块订阅到“cmd_vel”发布的线速度和角速度后,根据运动学模型可计算出左右轮速度,如图4所示。O1、O2分别是左、右驱动轮的轮心,轮间距O1O2
为l,C为O1O2的中心,、、分别为左、右驱动轮及智能代步车中心的速度。
智能代步车做圆弧运动。
3.3 驱动层
驱动层主要由控制部分和被控制部分组成,如图5所示。控制部分即控制器,被控部分即电机。图中带叉号的圆圈为比较环节,用来将输入与输出相减,给出偏差信号。控制器通过接收决策层输出的控制指令和智能代步车的实际速度
计算偏差,再由偏差产生作用去消除偏差,对电机发出控制信号。电机在控制信号的作用下实现被控运动,从而驱动智能代步车以预定的速度运行。
3.4 感知层
感知层主要包括外部激光传感器、stargazer、gps和内部的光电编码器。激光传感器用来获取智能代步车周围障碍物的距离信息,为建立地图和自主避障提供信息。stargazer通过对标签的识别实现室内定位功能。室外多属于公共场所,相比室内环境复杂,因此采用GPS获取自身所在的位置和航向角信息。光电编码器可以检测电机的转过的圈数,通过公
式(5)―(7)实现里程计和速度的计算。
在车体不发生侧滑的情况下,车体方位与左右轮运动速度和具有如下关系:
根据编码器的采样信息,将公式(5)―(7)两边积分,可实时计算出智能代步车车体方位。
4 仿真实验(Simulation experiment)
为了验证运动控制系统的有效性,在rviz仿真平台上结合ROS对建立的运动控制系统进行了仿真实验,对其运动性能进行了分析。实验首先运行核心节点roscore,然后启动已经创建好的智能代步车自主导航节点,并在rviz中导入已有的环境地图,通过rviz窗口最顶端“2D Pose Estimate”和“2D Nav Goal”设置智能代步车的初始位置和目标位置。通过图6可以看出,在地图中任意选择一个目标点,智能代步车都能够规划出一条最优路径完成并到达指定位置。图6中黄色的箭头表示智能代步车前进的方向,绿色的实线代表ROS规划的路径。
5 结论(Conclusion)
本文提出的基于ROS的智能代步车嵌入式运动控制系统具备室内外定位导航功能,体积小、功耗低,运用ROS中基于扩展卡尔曼滤波器同时定位与地图创建方法构建定位系
统和SLAM地图,依靠ROS中已有的Dijkstra最优路径算法计算出智能代步车到达目标位置的最优路径,通过两轮差速
的驱动方式实现从当前位置安全到达地图中其它指定位置。
本文提出的嵌入式运控制系统利用了ROS的软件架构和导航功能包,开发人员只需要少量的编程工作即可构建一套较为完整的运动控制系统,使得软件搭建工作更方便,效率更高。
参考文献(References)
[1] Liangwen Wang,et al.A geometric approach to solving the stable workspace of quadruped bionic robot with hand
foot-integrated function[J].Robotics and Computer Integrated Manufacturing,2016:13.
[2] Hong Zhang,et al.Adaptive incremental learning of image semantics with application to social
robot[J].Neurocomputing,2016:173.
[3] Rai-Wung Park.Nonlinearity Estimation and Compensation for Robust Paths and Forces Control of
Robot[J].British Journal of Applied Science & Technology,2015,
7(2):224-236.
[4] Maciej Petko,Grzegorz Karpiel,Konrad Gac,Grzegorz Góra,Konrad kobus,Janusz Ochoski.Trajectory tracking controller of the hybrid robot for milling[J].Mechatronics,2016, 8:100-111.
[5] 张建伟,等.开源机器人操作系统ROS[M].北京科学
出版社,2012:9-24.
[6] 马丁内斯.刘品杰,译.ROS机器人程序设计[M].北京:机械工业出版
社,2014.
[7]
[8]
[9] 高雅,李晓娟,关永.运用定理证明器ACL2验证机器人操作系统ROS节点间通信[J].小型微型计算机系统,2014, 35(9):2126-2130.
作者简介:
史小露(1987-),女,硕士,设计师.研究领域:机器人操作系统,嵌入式开发.
郑友胜(1982-),男,博士,高级工程师.研究领域:机器人操作系统,智能控制系统.
张磊(1986-),男,硕士,工程师.研究领域:飞机航空电子总体设计.
两轮直立智能车设计
计算机控制技术 课程设计 成绩评定表 设计课题两轮直立代步车控制器设计学院名称:电气工程学院 专业班级: 学生姓名: 学号: 指导教师: 设计地点:31-503 设计时间: 2012-06-11~2011-06-15
计算机控制技术课程设计 课程设计名称:两轮直立代步车控制器设计专业班级: 学生姓名: 学号: 指导教师: 课程设计地点:31-503 课程设计时间:2011-06-11~2011-06-15
计算机控制技术课程设计任务书 目录 1 引言 (3)
2 总体方案设计 (4) 2.1硬件组成 (4) 2.2整体电路框图 (4) 2.3直立任务分解 (4) 2.4平衡控制 (5) 2.5角度和角速度测量 (5) 2.4速度控制 (7) 2.5方向控制 (9) 3 硬件电路设计 (9) 3.1 单片机及其外围电路 (9) 3.2控制电路划分为如下子模块: (10) 4 系统软件设计 (13) 4.1 主程序设计 (13) 4.2控制相关的软件函数: (14) 4.3中断服务程序 (15) 5总结 (15) 参考文献 (15) 附录A 电路图 (16) 1 引言 两轮自平衡电动代步车是一种两轮左右并行布置结构的具有自平衡系统的电动车。利用倒立摆控制原理,使车体始终保持平衡。在车体内嵌入式CPU的控
制下,采集平衡传感器以及速度、加速度传感器的数据,通过建立的系统数学模型和控制算法,计算输出PWM信号,自动控制两个伺服电机的转矩,使车体保持平衡并能够根据人体重心的偏移,自动前进、后退及转弯。 2 总体方案设计 2.1硬件组成 按两轮自平衡电动代步车控制系统的技术要求,控制系统的硬件应包括以下几部分: (1)控制器。作为控制系统的核心,采用S12G128单片机控制各个模块。 (2)速度检测通道。将运动量转换为数字量,送给单片机,直接读取当前速度。 (3)控制输出通道。控制器输出的控制信号传送给电机,控制电机的正反转和速度。 (4)加速度检测通道。将电机角加速度转换为电信号。 (5)角度检测通道。将系统倾角转换为电信号。 2.2整体电路框图 图2.1 总体控制框图 2.3直立任务分解 (1)控制平衡:通过控制两个电机正反向运动保持车模直立平衡状态; (2)速度控制:通过调节车模的倾角来实现车模速度控制,实际上最后还
计算机三级嵌入式系统开发技术真题及答案
计算机三级嵌入式系统开发技术真题及答案 一、选择题 1:下面关于嵌入式系统逻辑组成的叙述中,错误的是()。 A.嵌入式系统与通用计算机一样,也由硬件和软件两部分组成 B.硬件的主体是CPU和存储器,它们通过I/O接口和I/O设备与外部世界联系 C.嵌入式系统的CPU主要使用的是数字信号处理器 D.嵌入式系统的软件配置有些很简单,有些比较复杂 2:下面关于数字信号处理器的叙述中错误的是()。 A.它是一种适用于数字信号处理的微处理器 B.它的英文缩写是DPS C.它支持单指令多数据(SIMD)并行处理的指令 D.它能显著提高音频、视频等数字信号的数据处理效率 3:片上系统是嵌入式处理器芯片的一个重要品种,下列叙述中错误的是()。 A.SoC已经成为嵌入式处理器芯片的主流发展趋势 B.它是集成电路加工工艺进入到深亚微米时代的产物 C.片上系统使用单个芯片进行数据的采集、转换、存储和处理,但不支持I/O功能 D.片上系统既能把数字电路也能把模拟电路集成在单个芯片上
4:按照软硬件技术复杂程度进行分类,可以把嵌入式系统分为哪三大类?()。 A.高端系统、中端系统和低端系统 B.军用系统、工业用系统和民用系统 C.硬实时系统、准实时系统和非实时系统 D.片上系统、微控制器和数字信号处理器 5:半导体集成电路是微电子技术的核心。下面有关集成电路的叙述中错误的是()。 A.集成电路有小规模、中规模、大规模、超大规模和极大规模等多种,嵌入式处理器芯片一般属于大规模集成电路 B.集成电路的制造大约需要几百道工序,工艺复杂且技术难度非常高 C.集成电路大多在硅衬底上制作而成,硅衬底是单晶硅锭经切割、研磨和抛光而成的圆形薄片 D.集成电路中的电路及电子元件,需反复交叉使用氧化,光刻,掺杂和互连等工序才能制成 6:一幅1024 x 768的彩色图像,每个像素使用16位表示,采用压缩比为5倍的算法压缩图像数据之后,其数据量大约是多少MB?()。 A.0.3 B.0.5 C.1
【CN109887184A】一种共享座椅式智能代步车的系统以及方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910287913.9 (22)申请日 2019.04.11 (71)申请人 深圳市班玛智行科技有限公司 地址 518000 广东省深圳市福田区华富街 道彩田路与福中路交汇处瑰丽福景大 厦3号楼21层2101室 (72)发明人 刘海军 (74)专利代理机构 北京权智天下知识产权代理 事务所(普通合伙) 11638 代理人 郭佳 (51)Int.Cl. G07F 17/00(2006.01) G07B 15/02(2011.01) (54)发明名称 一种共享座椅式智能代步车的系统以及方 法 (57)摘要 本发明公开了一种共享座椅式智能代步车 的系统,包括中央处理模块和云平台,中央处理 模块和云平台之间通过无线收发器实现双向连 接,中央处理模块分别与分时单元、分离单元、定 位模块、安全单元和租用模块实现双向连接,分 时单元分别与分离单元和结算模块实现双向连 接,本发明涉及交通工具技术领域。该共享座椅 式智能代步车的系统以及方法,可以根据装置使 用的高峰期和低谷期进行价格调节,价格合理, 使得用户体验更加舒适,同时可以进入室内使 用,解决了现有的共享代步车限制较多,不能进 入室内,导致用户不能够更加细致的享受,对于 使用租金的价格也是一成不变,导致在一些情况 下, 用户不能够获得更好体验的问题。权利要求书2页 说明书5页 附图3页CN 109887184 A 2019.06.14 C N 109887184 A
权 利 要 求 书1/2页CN 109887184 A 1.一种共享座椅式智能代步车的系统,包括中央处理模块(1)和云平台(2)和代步车本体(34),所述中央处理模块(1)和云平台(2)之间通过无线收发器实现双向连接,其特征在于:所述中央处理模块(1)分别与分时单元(3)、分离单元(4)、定位模块(5)、安全单元(6)和租用模块(7)实现双向连接,所述分时单元(3)分别与分离单元(4)和结算模块(8)实现双向连接,所述分离单元(4)与定位模块(5)实现双向连接,所述租用模块(7)与登录单元(9)实现双向连接,所述登录单元(9)分别与云平台(2)、结算模块(8)、客户端(10)和购买模块(11)实现双向连接,所述云平台(2)和信息存储模块(12)实现双向连接,所述代步车本体(34)的侧面固定连接有LED广告屏幕(35),且LED广告屏幕(35)与代步车本体(34)内部的蓄电池电性连接,所述中央处理模块(1)和云平台(2)分别设置在代步车本体(34)坐垫的底部。 2.根据权利要求1所述的一种共享座椅式智能代步车的系统,其特征在于:所述分时单元(3)包括编辑模块(13)、分时定价模块(14)、开始确定模块(15)、计时模块(16)、路程计量模块(17)和暂停模块(18),所述编辑模块(13)与分时定价模块(14)实现双向连接,所述分时定价模块(14)与开始确定模块(15)实现双向连接,所述开始确定模块(15)分别与计时模块(16)、路程计量模块(17)和暂停模块(18)实现双向连接,且暂停模块(18)与路程计量模块(17)实现双向连接。 3.根据权利要求1所述的一种共享座椅式智能代步车的系统,其特征在于:所述分离单元(4)包括控制开关(19)、微型处理器(20)、信息存储器(21)、分离控制模块(22)、散热机组(23)和照明模块(24),所述微型处理器(20)分别与控制开关(19)、信息存储器(21)和分离控制模块(22)实现双向连接,且微型处理器(20)的输出端与散热机组(23)的输入端连接。 4.根据权利要求1所述的一种共享座椅式智能代步车的系统,其特征在于:所述安全单元(6)包括自锁模块(25)、GPS定位器(26)、紧急模块(27)、报警模块(28)和防盗锁(29),所述自锁模块(25)分别与GPS定位器(26)、报警模块(28)和防盗锁(29)实现双向连接,且紧急模块(27)分别与GPS定位器(26)和报警模块(28)实现双向连接,所述计时模块(16)和路程计量模块(17)均与结算模块(8)实现双向连接。 5.根据权利要求3或4所述的一种共享座椅式智能代步车的系统,其特征在于:所述编辑模块(13)与中央处理模块(1)实现双向连接,所述开始确定模块(15)通过无线收发模块与控制开关(19)实现双向连接,且微型处理器(20)与中央处理模块(1)实现双向连接,所述信息存储器(21)与定位模块(5)实现双向连接。 6.根据权利要求1所述的一种共享座椅式智能代步车的系统,其特征在于:所述登录单元(9)包括注册模块(30)、账号密码输入模块(31)、验证模块(32)和对比确定模块(33),所述注册模块(30)的输出端与账号密码输入模块(31)的输入端连接,所述账号密码输入模块(31)的输出端与验证模块(32)的输入端连接,所述验证模块(32)的输出端与对比确定模块(33)的输入端连接。 7.根据权利要求6所述的一种共享座椅式智能代步车的系统,其特征在于:所述对比确定模块(33)分别与云平台(2)、购买模块(11)和租用模块(7)实现双向连接。 8.一种共享座椅式智能代步车的使用方法,其特征在于:具体包括以下步骤: 步骤一、用户通过扫描二维码或者登陆网站使用客户端(10),按照登录单元(9)的指示,在注册模块(30)上进行注册,在账号密码输入模块(31)上输入账号密码,通过验证模块 2
我国嵌入式技术的发展和现状
学号:20097610144 班级:09级1班 姓名:王丹
我国嵌入式技术的现状与发展 嵌入式系统是计算机的一种应用形式,通常指埋藏在宿主设备中的微处理机系统,此类计算机一般不被设备使用者在意,亦称埋藏式计算机,典型机种如微控制器、微处理器和DSP等。 随着信息化,智能化,网络化的发展,嵌入式系统技术也将获得广阔的发展空间。美国著名未来学家尼葛洛庞帝在1999年1月访华时预言,4~5年后嵌入式智能(电脑) 工具将是PC和因特网之后最伟大的发明。我国著名嵌入式系统专家沈绪榜院士98年11月在武汉全国第11次微机学术交流会上发表的《计算机的发展与技术》一文中,对未来10年以嵌入式芯片为基础的计算机工业进行了科学的阐述和展望。1999年世界电子产品产值已超过12000亿美元,2000年达到13000亿美元,预计2005年,销售额将达18000亿美元。 进入20世纪90年代,嵌入式技术全面展开,目前已成为通信和消费类产品的共同发展方向。在通信领域,数字技术正在全面取代模拟技术。在广播电视领域,美国已开始由模拟电视向数字电视转变,欧洲的DVB(数字电视广播)技术已在全球大多数国家推广。数字音频广播(DAB)也已进入商品化试播阶段。而软件、集成电路和新型元器件在产业发展中的作用日益重要。所有上述产品中,都离不开嵌入式系统技术。像前途无可计量的维纳斯计划生产机顶盒,核心技术就是采用32位以上芯片级的嵌入式技术。在个人领域中,嵌入式产品将主要是个人商用,作为个人移动的数据处理和通讯软件。由于嵌入式设备具有自然的人机交互界面,GUI屏幕为中心的多媒体界面给人很
大的亲和力。手写文字输入、语音拨号上网、收发电子邮件以及彩色图形、图像已取得初步成效。 目前一些先进的PDA在显示屏幕上已实现汉字写入、短消息语音发布,日用范围也将日益广阔。对于企业专用解决方案,如物流管理、条码扫描、移动信息采集等,这种小型手持嵌入式系统将发挥巨大的作用。自动控制领域,不仅可以用于ATM机,自动售货机,工业控制等专用设备,和移动通讯设备结合、GPS、娱乐相结合,嵌入式系统同样可以发挥巨大的作用。近期长虹推出的ADSL产品,结合网络,控制,信息,这种智能化,网络化将是家电发展的新趋势。 硬件方面,不仅有各大公司的微处理器芯片,还有用于学习和研发的各种配套开发包。目前低层系统和硬件平台经过若干年的研究,已经相对比较成熟,实现各种功能的芯片应有尽有。而且巨大的市场需求给我们提供了学习研发的资金和技术力量。从软件方面讲,也有相当部分的成熟软件系统。国外商品化的嵌入式实时操作系统,已进入我国市场的有WindRiver、Microsoft、QNX和Nuclear等产品。我国自主开发的嵌入式系统软件产品如科银(CoreTek)公司的嵌入式软件开发平台Delta System,中科院推出的Hopen嵌入式操作系统(虽然还不够完善)。同时由于是研究热点,所以我们可以在网上找到各种各样的免费资源,从各大厂商的开发文档,到各种驱动,程序源代码,甚至很多厂商还提供微处理器的样片。这对于我们从事这方面的研发,无疑是个资源宝库。对于软件设计来说,不管是上手还是进一步开发,都相对来说比较容易。这就使得很多生手能够比较快的进入研究状态,利于发挥大家的积极创造性。
国产MCT8000系列开放式运动控制器
如果您想开发具有自主知识产权,物美价廉的数控系统或者运动控制系统,请您不妨关注一下国产MCT8000系列开放式运动控制器。 1. 它可以让您快速的构造基于PC的运动控制(数控)系统。2. 可以控制各种伺服、步进电机,实现开,闭环控制。 3. 可以进行网络控制。4. 提供二维、三维圆弧和直线插补。5. 最小伺服更新周期可以达到0.2毫秒!摩信MCT8000系列开放式运动控制器简介MCT8000系列开放式运动控制器是目前市场上开放性最好的运动控制器,可以控制步进电机和交、直流伺服电机。下位机采用标准C语言编程,提供超级开放的底层软硬件接口。用户可以在此基础上构造自己的闭环控制算法以及各种硬件插补算法。控制器的CPU采用美国TI TMS320C31 40MHz DSP,主控机与控制器之间采用双向高速FIFO 进行通讯,可提供1~16轴高速步进电机系统控制。主控机可选用任何带有ISA 插槽PC系列微机。MCT8000系列产品在设计上采用了先进的软硬件重构技术。我们能够根据每一客户每一个不同的要求,对控制器的硬件模块进行最佳调整,配以摩信科技的基本输入输出系统BIOS、基本运动控制函数库BMCL、主机C语言函数库MCTHOST.LIB和动态连接库MCTHOSTDLL.DLL以及浮动网际在线控制界面WMOCI,使提供给客户的MCT8000运动控制器具有最佳性能价格比。特有性能* 网际浮动式操作界面,方便远程在线、多系统协调作业,支持远程调试和故障诊断功能。* 开放式结构,可随意增加外部传感器,扩展系统功能。* 高伺服更新速度,每轴最小10μs,可直接控制DD (Direct Drive)臂机器人和高速直线电机;* 高可靠性双CPU结构,下位机可脱离上位机工作。* 优良的软硬件重构特性,便于技术升级和维护。* 兼容性好,配备摩信科技的运动控制模块,可以控制多种机器人、数控机床以及其他过程控制系统。基本应用领域* 直流和交流伺服电机系统* 步进电机系统* 机器人控制系统* 数控机床控制系统* 直线驱动器控制系统* 主动振动控制系统* 传感器融合控制系统* 演示系统,如倒立摆* 液压伺服系统* 飞行模拟器控制系统* 信号采集和处理系统* 网络监控系统运动控制及其它控制功能* 梯形,双S,双抛物线插补方式。* 1~3维PTP和CP直线-直线,直线-圆弧,圆弧-圆弧轨迹控制方式。* 内置标准的PID控制算法。* 自动PID参数整定功能。* 远程诊断和监控功能。* 自动搜索INDEX信号。技术参数* CPU采用美国Texas Instruments公司TMS320C31 40MHz DSP。* 128K/512K/640K×32位12ns高速静态RAM。* 2M 位90ns 闪速(FLASH)内存。* 4~8通道12位模拟量输出,-10V~+10V输出范围,工作频率100KHz。* 4~8通道0~2MHz的正负差动步进脉冲输出,正负差动方向控制信号。* 6~12通道12位模拟量输入,-10V~+10V输入范围,625KHz采样频率。* 4~8通道光电编码器接口,24位计数器,计数频率4.25MHz,差动或单端输入,Index信号,内部数字滤波。* 16位可编程数字输入/输出接口,TTL电平。* 32~64路光电隔离数字输出接口。* 32~64路光电隔离数字输入接口。* 与主机连接方式:标准ISA总线接口。* 支持单主机多块控制板同时工作。* 操作系统:Windows 95/98/NT/2000。软件包(软件包资料详见软件产品说明书)MCT-BIOS * 对主控板MCT8000所有可用I/O口进行直接操作的各种函数;* 主控机与主控板的通讯内核;* TI (Texas Instruments) 的C编译和连接器;* 摩信科技的应用程序下载器。MCT-BMCL * 提供1~3维空间连续轨迹的运动插补和控制函数库。MCT-WMOCL 提供基于网络技术和Windows 的开发平台。深圳市摩信科技有限公司Shenzhen Motion Control Technology Co.,Ltd 杨先生张先生地址(Address):中国,广东,深圳市南山区科技园虚拟大学园A510 邮政编码(ZIP):518057 手机(Mobile):86-135******** 电话(Telephone):86-755-26712039 / 26712011 FAX:86-755-26712040 Email:Thudy@https://www.360docs.net/doc/6010841630.html, https://www.360docs.net/doc/6010841630.html,
计算机三级嵌入式系统题库及解析第3套
计算机三级嵌入式系统题库及解析第3套 一、选择题 1: 与个人计算机(PC)相比,嵌入式系统具有许多不同的特点。下面不属于嵌入式系统特点的是()。 A: 嵌入式系统与具体应用紧密结合,具有很强的专用性 B: 嵌入式系统通常包含在非计算机设备(系统)中,具有隐蔽性 C:嵌入式系统的软硬件资源往往受到严格的限制 D:嵌入式系统性能较低,价格也比较便宜 2: 嵌入式系统中的CPU具有一些与通用计算机所使用的CPU不同的特点,下面不是其特点的是()。 A: 支持实时处理 B: 低功耗 C:高主频 D:集成了测试电路 3: 嵌入式系统使用的片上系统英文缩写名为SoC,下面关于SoC叙述中错误的是()。 A:SoC也称为系统级芯片,它是电子设计自动化水平的提高和集成电路制造技术飞速发展的产物 B:SoC芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/ 模拟混合电路和射频电路 C:SoC将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、转换、存储、处理和I/O 等多种功能 D:SoC的设计制造难度很大,目前还没有得到广泛使用 4: 微电子技术特别是集成电路制造技术是嵌入式系统发展的重要基础,下面关于集成电路的叙述中错误的是()。 A: 集成电路的集成度指的是单个集成电路所含电子元件(如晶体管、电阻、电容等)的数目多少
B: 根据集成度的高低,集成电路可以分为小规模、中规模、大规模、超大规模和极大规模等几种 C:嵌入式系统中使用的处理器芯片属于大规模集成电路 D:集成电路的制造工艺复杂且技术难度非常高,许多工序必须在恒温、恒湿、超洁净的无尘厂房内完成 5: 文字信息是人们用以表达和传递信息的媒体之一,大多数嵌入式系统都必须处理文字信息。下面关于文字信息的表示及其处理的叙述中,错误的是()。 A: 目前使用最广泛的西文字符集是ASCII字符集,它包含96个可打印字符 B:GB2312是我国目前广泛使用的汉字编码国家标准之一 C:GB2312包括6000多汉字,但不包含西文、俄文等其他字符 D:GB2312字符集中的汉字与符号在系统中采用双字节表示 6: 假设一台数码相机一次可拍摄16位色1024 x 1024的彩色相片共80张,数据压缩比平均是4,则它使用的存储器容量大约是()。 A:40MB B:60MB C:80MB D:120MB 7: 在数字音频信息数字化过程中,正确的处理顺序是()。 A: 量化、取样、编码 B: 取样、编码、量化 C:取样、量化、编码 D:编码、取样、量化 8: 互联网借助TCP/IP协议把许多同构或异构的计算机网络互相连接起来,实现了遍布全球的计算机的互连、互通和互操作,其中的IP 协议起着关键性的作用。下面有关IP 协议的叙述中,错误的是()。 A:IP 地址解决了网络中所有计算机的统一编址问题 B:IP 数据报是一种独立于各种物理网络的数据包格式 C:目前广泛使用的是IP 协议的第6版( IPv6 ),IPv4 已经很少使用
计算机控制系统试题一答案
计算机控制系统试卷一答案 班级:姓名:学号:成绩: 一、简答题(每小题5分,共50分) 1、画出典型计算机控制系统的基本框图。 答:典型计算机控制系统的基本框图如下: 2、根据采样过程的特点,可以将采样分为哪几种类型? 答:根据采样过程的特点,可以将采样分为以下几种类型。 (1) 周期采样 指相邻两次采样的时间间隔相等,也称为普通采样。 (2) 同步采样 如果一个系统中有多个采样开关,它们的采样周期相同且同时进行采样,则称为同步采样。 (3) 非同步采样 如果一个系统中有多个采样开关,它们的采样周期相同但不同时开闭,则称为非同步采样。 (4) 多速采样 如果一个系统中有多个采样开关,每个采样开关都是周期采样的,但它们的采样周期不相同,则称多速采样。 (5) 随机采样 若相邻两次采样的时间间隔不相等,则称为随机采样。 3、简述比例调节、积分调节和微分调节的作用。 答:(1)比例调节器:比例调节器对偏差是即时反应的,偏差一旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数K P。比例调节器虽然简单快速,但对于系统响应为有限值的控制对象存在静差。加大比例系数K P可以减小静差,但是K P过大时,会使系统的动态质量变坏,引起输出量
振荡,甚至导致闭环系统不稳定。 (2)积分调节器:为了消除在比例调节中的残余静差,可在比例调节的基础上加入积分调节。积分调节具有累积成分,只要偏差e不为零,它将通过累积作用影响控制量u,从而减小偏差,直到偏差为零。积分时间常数T I大,则积分作用弱,反之强。增大T I将减慢消除静差的过程,但可减小超调,提高稳定性。引入积分调节的代价是降低系统的快速性。 (3)微分调节器:为加快控制过程,有必要在偏差出现或变化的瞬间,按偏差变化的趋向进行控制,使偏差消灭在萌芽状态,这就是微分调节的原理。微分作用的加入将有助于减小超调,克服振荡,使系统趋于稳定。 4、采样保持器LF398工作原理图如下图,试分析其工作原理。 答:LF398的电路原理:放大器A2作为比较器来控制开关K的通断,若IN+的电压高于IN-的电压,则K闭合,由A1、A3组成跟随器,并向C H端外接的保持电容充电;IN+的电压低于IN-的电压时,则K断开,外接电容保持K断开时刻的电压,并经A3组成的跟随器输出至Aout。 5、线性离散控制系统稳定的充要条件是什么? 答:线性离散控制系统稳定的充要条件是:闭环系统特征方程的所有根的模|z i|<1,即闭环脉冲传递函数的极点均位于z平面的单位圆内。 6、为什么会出现比例和微分饱和现象? 答:当给定值发生很大跃变时,在PID增量控制算法中的比例部分和微分部分计算出的控制增量可能比较大(由于积分项的系数一般小得多,所以积分部分的增量相对比较小)。如果该计算值超过了执行元件所允许的最大限度,那么,控制作用必然不如应有的计算值理想,
计算机等级考试三级嵌入式技术题库及参考答案
计算机等级考试三级嵌入式技术题库及参考答案
全国计算机等级考试三嵌入式系统开发技术题库第1套 一、选择题 1:嵌入式系统是一类特殊的计算机系统。下列产品中不属于嵌入式系统的是()。 A:电饭煲 B:路由器 C:巨型机 D:POS机 2:嵌入式系统硬件的核心是CPU。下面关于嵌入式系统CPU特点的叙述中,错误的是()。 A:支持实时处理 B:低功耗 C:字长在16位以下 D:集成了测试电路 3:下面关于微控制器的叙述中,错误的是()。 A:微控制器将整个计算机硬件的大部甚至全部电路集成在一块芯片中 B:微控制器品种和数量最多,在过程控制、机电一体化产品、智能仪器仪表、家用电器、计算机网络及通信等方面得到了广泛应用 C:微控制器的英文缩写是MCU D:8位的微控制器现在已基本淘汰 4:片上系统(SoC)也称为系统级芯片,下面关于SoC叙述中错误的是()。 A:SoC芯片中只有一个CPU或DSP B:SoC芯片能够分为通用SoC芯片和专用SoC芯片两大类 C:专用SoC芯片可分为定制的嵌入式处理芯片和现场可编程嵌入式处理芯片两类 D:FPGA芯片能够重复地编程、擦除、使用,在较短时间内就可完成电路的输入、编译、优化、仿真,直至芯片的制作 5:数码相机是嵌入式系统的典型应用之一。下面关于数码相机的叙述中,错误的是()。
B:后端一般是以嵌入式DSP作为核心的SoC芯片,DSP用于完成数字图像处理 C:负责进行数码相机操作控制(如镜头变焦、快门控制等)是一个32位的MCU D:高端数码相机配置有实时操作系统和图像处理软件 6:电子书阅读器中存储的一本中文长篇小说,大小为128KB,文件格式为.txt,试问该小说包含的汉字大约有多少万字?() A:6万字 B:12万字 C:25万字 D:40万字 7:数字视频信息的数据量相当大,一般需要进行压缩处理之后才进行传输和存储。当前数字有线电视所传输的数字视频采用的压缩编码标准是()。 A:MPEG-1 B:MPEG-2 C:MPEG-4 D:MPEG-7 8:下面是IP协议中C类IP地址有关规定的叙述,其中正确的是()。 A:它适用于中型网络 B:它所在的网络最多只能连接254台主机 C:它不能用于多目的地址发送(组播) D:它的二进制表示中最高3位一定是“101” 9:对于嵌入式处理器内核的分类,以下说法正确的是()。 A:按照字长可分为8位结构和32位结构 B:按照存储结构可分为RISC和哈佛结构 C:按照体系结构可分为CISC和RISC结构 D:按照指令结构可分为冯.诺依曼结构和哈佛结构 10:不属于ARM内核主要特点的是()。 A:功耗低
基于嵌入式系统的家庭智能系统
摘要 随着嵌入式技术的发展和高速宽带网络的普及, 利用网络实现远程监控已为人们广泛接受, 嵌入式网络监控技术正是在此条件下逐步发展成熟起来的. 用户使用Web 浏览器, 通过以太网远程访问内置Web 服务器的监控摄像机, 不但可以实现对现场的远程视频监控, 而且可以向监控现场发送指令. 在整个系统的实现过程中, 嵌入式Web 服务器起着十分重要的作用, 因此, 在嵌入式网络视频监控系统中,Web 服务器的设计对监控系统的整体性能具有直接的影响, 只有有了高效率的Web 服务器, 监控系统的性能才能得到充分的发挥。 实现智能化离不开运算和控制单元,本系统采用MCU(S3C2410)作为主控器件,单片机应用系统由硬件和软件组成。硬件由单片机扩展的存储器、输入/出设备以及各种实现单片机系统控制要求的接口电路和有关的外围电路芯片或部件组成;软件由单片机应用系统实现其特定控制功能的各种工作程序和管理程序组成。在单片机应用系统开发的过程中,应不断调整软、硬件,协调地进行软、硬件设计,以提高工作效率,当系统硬件和软件紧密配合、协调一致,就可以组成高性能的单片机应用系统。本课题完成了单片机应用系统其开发过程的系统的总体设计、硬件设计、软件设计和系统调试,根据开发的实际需要,相互协调、交叉,有机的进行。 随着Internet 向普通家庭生活不断扩展,消费电子、计算机、通讯一体化趋势日趋明显,现代智能家居由于其安全、方便、高效、快捷、智能化等特点在21 世纪将成为现代社会和家庭的新时尚。当家庭智能网关将家庭中各种各样的家电通过家庭总线技术连接在一起时,就构成了功能强大、高度智能化的现代智能家居系统。而基于嵌入式系统的家庭智能系统在国内才刚刚出现,随着嵌入式技术更加广泛的应用,随着成本的逐步降低,中国的智能家居最终将走向嵌入式。 关键词:嵌入式;智能;监控;web服务器
基于ROS的智能代步车嵌入式运动控制系统
基于ROS的智能代步车嵌入式运动控制系统 摘要:针对目前智能代步车运动控制系统功耗高、体积大和开发成本高和工作量大等不足,提出一种基于机器人操作系统(Robot Operating System,ROS)的智能代步车嵌入式运动控制系统。该运动控制系统将ROS移植到arm嵌入式板卡,将arm作为中央处理器,运用ROS中的导航功能包实现智能代步车的地图建立、路径 规划、室内外自主导航、运动控制等功能,最后通过仿真实验验证了该运动控制系统的可行性。 关键词:机器人操作系统;智能代步车;嵌入式运功控制系统 中图分类号:TP311 文献标识码:A 文章编号:2096-1472(2016)-06-48-03 Abstract:In view of some outstanding problems of intelligent electronic scooters,such as the high power consumption,the huge size,the high development costs and heavy workload,the paper proposes an embedded motion control system based on the Robot Operating System(ROS)for intelligent electronic scooters the ROS was ported to the arm embedded board which is used as the central processor in the embedded motion control system.Functions like map building, route planning,indoor and outdoor autonomous navigation and motion control are implemented through the ROS navigation function package.At the end of the paper,the feasibility of the motion control system is verified through the simulation experiments. Keywords:ROS;intelligent electronic scooters;embedded motion control systems
嵌入式技术的研究发展现状
嵌入式技术的研究发展现状 引言:在现在日益信息化的社会中,计算机和网络已经全面渗透到日常生活的每一个角落。对于我们每个人,需要的已经不再仅仅是那种放在桌上处理文档,进行工作管理和生产控制的计算机"机器";各种各样的新型嵌入式系统设备在应用数量上已经远远超过通用计算机,任何一个普通人可能拥有从大到小的各种使用嵌入式技术的电子产品,小到mp3,PDA等微型数字化产品,大到网络家电,智能家电,车载电子设备。而在工业和服务领域中,使用嵌入式技术的数字机床,智能工具,工业机器人,服务机器人也将逐渐改变传统的工业和服务方式。 一、嵌入式技术和嵌入式系统的定义及特点 嵌入式技术是将计算机作为一个信息处理部件,嵌入到应用系统中的一种技术,也就是说,它将软件固化集成到硬件系统中,将硬件系统与软件系统一体化。嵌入式具有软件代码小、高度自动化和响应速度快等特点,因而进入21世纪后其应用越来越广泛,例如,各种家用电器如电冰箱、自动洗衣机、数字点电视机、数码相机等广泛应用这种技术。 嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。它一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序等四个部分组成,用于实现对其他设备的控制、监视或管理等功能。它是计算机的一种应用形式,通常指埋藏在宿主设备中的微处理机系统,此类计算机一般不被设备使用者在意,亦称埋藏式计算机,典型机种如微控制器、微处理器和DSP等。 嵌入式系统可以称为后PC时代和后网络时代的新秀。与传统的通用计算机,数字产品相比,利用嵌入式技术的产品有其自己的特点: 1、由于嵌入式系统采用的是微处理器,实现相对单一的功能,采用独立的操作系统,所以往往不需要大量的外围器件。因而在体积上,功耗上有其自身的优势。相比之下,一个使用Windows CE的PDA,仅靠机内电源就可以使用几天,而任何一台笔记本仅仅能够支持3小时左右。 2、嵌入式系统是将计算机技术、半导体技术和电子技术与各个行业的具体应用相结合后的产物,是一门综合技术学科。由于空间和各种资源相对不足,嵌入式系统的硬件和软件都必须高效率地设计,量体裁衣、去除冗余,力争在同样的硅片面积上实现更高的性能,这样才能在具体应用中对处理器的选择更具有竞争力。 3、嵌入式系统是一个软硬件高度结合的产物。为了提高执行速度和系统可靠性,嵌入式系统中的软件一般都固化在存储器芯片或单片机本身中,而不是存贮于磁盘等载体中。片上系统,板上系统的实现,使得以pda等为代表的这类产品拥有更加熟悉的操作界面和操作方式,比着传统的商务通等功能更加完善,实用。
(完整版)通用PC系统与嵌入式系统的区别.doc
通用 PC系统与嵌入式系统的区别.txt精神失常的疯子不可怕,可怕的是精神正常的疯子! 一什么是嵌入式系统 嵌入式系统一般指非 pc 系统,有计算机功能但又不称之为计算机的设备或器材。它是以应用 为中心,软硬件可裁减的,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格 要求的专用计算机系统。简单地说,嵌入式系统集系统的应用软件与硬件于一体,类似于pc 中 bios 的工作方式,具有软件代码小、高度自动化、响应速度快等特点,特别适合于要 求实时和多任务的体系。嵌入式系统主要由嵌入式处理器、相关支撑硬件、嵌入式操作系统 及应用软件系统等组成,它是可独立工作的“器件”。 嵌入式系统几乎包括了生活中的所有电器设备,如掌上pda、移动计算设备、电视机顶盒、 手机上网、数字电视、多媒体、汽车、微波炉、数字相机、家庭自动化系统、电梯、空调、安 全系统、自动售货机、蜂窝式电话、消费电子设备、工业自动化仪表与医疗仪器等。 嵌入式系统的硬件部分,包括处理器 / 微处理器、存储器及外设器件和 i/o 端口、图形控制器等。嵌 入式系统有别于一般的计算机处理系统,它不具备像硬盘那样大容量的存储介质,而 大多使用eprom、eeprom 或闪存 (flash memory)作为存储介质。软件部分包括操作系统软件 ( 要求实时和多任务操作 ) 和应用程序编程。应用程序控制着系统的运作和行为;而操作系统控制 着应用程序编程与硬件的交互作用。 二嵌入式处理器 嵌入式系统的核心是嵌入式微处理器。嵌入式微处理器一般具备 4 个特点: (1) 对实时和多任务有很强的支持能力,能完成多任务并且有较短的中断响应时间,从而使内部的代码和实时 操作系统的执行时间减少到最低限度;(2) 具有功能很强的存储区保护功能,这是由于嵌入 式系统的软件结构已模块化,而为了避免在软件模块之间出现错误的交叉作用,需要设计强 大的存储区保护功能,同时也有利于软件诊断;(3) 可扩展的处理器结构,以能迅速地扩展 出满足应用的高性能的嵌入式微处理器;(4) 嵌入式微处理器的功耗必须很低,尤其是用于便携式的无线及移动的计算和通信设备中靠电池供电的嵌入式系统更是如此,功耗只能为mw 甚至μ w 级。 据不完全统计,目前全世界嵌入式处理器的品种总量已经超过1000 种,流行的体系结构有 30 多个系列。其中 8051 体系占多半,生产这种单片机的半导体厂家有20 多个,共 350 多种衍生产品,仅 philips 就有近 100 种。现在几乎每个半导体制造商都生产嵌入式处理器,越来越多的公司有自己的处理器设计部门。嵌入式处理器的寻址空间一般从64kb 到 16mb,处理速度为 0.1~2000mips ,常用封装 8~144 个引脚。 根据现状,嵌入式计算机可分成下面几类: (1) 嵌入式微处理器(embedded microprocessor unit, empu) 嵌入式微处理器采用“增强型”通用微处理器。由于嵌入式系统通常应用于环境比较恶劣的 环境中,因而嵌入式微处理器在工作温度、电磁兼容性以及可靠性方面的要求较通用的标准 微处理器高。但是,嵌入式微处理器在功能方面与标准的微处理器基本上是一样的。根据实
嵌入式智能家居系统
嵌入式智能家居系统设计 摘要:“智能家居”(smart home),又称智能住宅,它利用先进的计算机技术、 嵌入式系统技术、网络通讯技术和传感器技术等,将家中的各种设备(照明系统、环境控制系统、安防系统、智能家电等)有机的连接到一起。智能家居让 用户采用更方便的手段来管理家庭设备,比如,通过无线遥控器、电话、互联 网或者语音识别控制家用设备,根据场景设定设备动作,使多个设备形成联 动。智能家居内的各种设备相互间可以通讯,不需要用户指挥也能根据不同的 状态互动运行,从而在最大程度上给用户提供高效、便利、舒适与安全的居住 环境和工作环境。本文通过对智能家居系统的分析,确定了总体架构设计。针 对智能家居系统的特点和所要实现的基本功能,分析了智能家居控制器的基本 结构,对控制器的核心电路进行了详细设计。 关键词:嵌入式智能微控制器 1、研究背景 智能化家居的发展分为三个层次: 首先是家庭电子化(HE,Home Electronics)。这个时期主要是面对单独电器的阶段,电子设备之间并没有很大的联系,如电视机刚出来的那些时期。 其次是住宅自动化(HA,home Automation)。该时期是面向功能的阶段,部 分电器设备具有了一些简单的网络连接功能,主要是为了实现某个单一的功 能,比如单一的自动抄表系统。最后是家居智能化,美国称其为Wise House,欧洲称为Smart Home。智能住宅是面向系统设计的,系统通过家庭分布总线(HDS,Home Distribution System)把住宅内各种与信息相关的通讯设备,家用电器和家庭保安装置都并入到网络节点中进行集中的和异地的监视控 制和家庭事务处理,并保持这些家庭设施与住宅环境的协调,提供工作、学习、娱乐等各项服务,营造出具有多功能的信息化居住空间。 智能家居控制系统提供安全、舒适的居住环境,确保人身和财产安全;空 调系统调节温度、湿度、检测空气成份,提高空气质量;系统调节音响和色 彩,使人们心情舒畅;合理利用阳光和大气冷热量来调节室内环境,减少能 耗,能按事先设定的程序,区分各种时段,对室内的环境及设备进行控制,并 提供现代化的通信手段和信息服务。 从设计思想和技术角度分析,当前国内的智能家居控制系统有两个研究方向:一是基于非PC平台的智能家居系统;二是基于PC平台的智能家居系 统。总体来说,国内智能家居产品的研发从上世纪九十年代后期才起步,起步
电动平衡车品牌排行榜
中国电动平衡车五大品牌企业排名榜 电动平衡车,又叫体感车、思维车、摄位车等。市场上主要有独轮和双轮两类。其运作原理主要是建立在一种被称为“动态稳定”(Dynamic Stabilization)的基本原理上,利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。 电动平衡车因其小巧方便、环保著称,电动平衡车也迅速成为大家的新宠,而目前电动平衡车品牌众多,而品牌与品牌之间也各有千秋,许多年轻人想拥有一款电动平衡车,但却不知道平衡车什么牌子好,很多人关注的主要在于电动平衡车的质量、价格以及安全性等方面。今天笔者为大家总结一下中国电动平衡车五大品牌企业排名榜,希望对大家有所帮助。 一、爱尔威 Airwheel(爱尔威)是一家专注于新科技,新材料,新工艺完美结合的极客科技团队.作为目前全球占有量60%的品牌,爱尔威日益创意.打造高安全性能的智能炫酷科技产品,创立伊始,以全球化的视野组建研发中心(洛杉矶、北京、常州)、营销中心(北京)、制造中心(常州)。作为世界范围内的便携式智能交通工具行业的领导者,我们热衷于将科技的乐趣带到世界的每一个角落,让人们真正从科技的进步中受益,爱尔威电动平衡车创立至今,已经研发出很多款电动平衡车,款式分别为X系列:X3、X5、X6、X8、X3限量版,音乐版:X5 Music、X6 Music,Q系列:Q1、Q3、Q5,S系列:S3、S3T、S5,A系列:A3。 爱尔威电动平衡车有着时尚炫酷的车形,有着美观大气的车身曲线,整体车身造型采用兰博基尼的造型前脸,内在儒雅大气,外在时尚炫酷。凭借着时尚度爆棚的外形,爱尔威电动平衡车成为了众多时尚族追捧的对象。 爱尔威电动平衡车的车身外壳是采用合成树脂材料制作而成的,使用这种材料制成的代步车非常抗摔、抗磨。另外,爱尔威电动平衡车的动力来源是原装进口的日本Sony电池,该电池的充电效率非常高,不仅可以循环充电1800余次,还有着长达5年的使用寿命,可为人们出行提供充足的动力支持。此外,爱尔威电动平衡车的最大承重可达120kg,最高时速可达18km/h,续航里程最高可达几十公里(不同体重可能会有所不同),同时,爱尔威电动平衡车自身带有安全防护措施,将安全性提高至同行最高。强悍的代步性能,也让爱尔威电动平衡车成功拥有了超高人气,受到了很多人的欢迎。 二、SOLOWHEEL SOLOWHEEL有限责任公司。数字化、无缝链接、清洁能源是未来个人交通出行的发展方向,这也是SOLOWHEEL的愿景所在。以尖端的技术、创造性的设计、贴心的服务不断改进用户的交通出行体验是SOLOWHEEL的使命。SOLOWHEEL让交通从只关注点与点之间的到达,变为真正的路上享受。SOLOWHEEL通过不断的技术改进,力求打造各个出行场景下最轻盈、最便携、最方便的交通出行工具。 1986年陈先生满怀发明热情,怀揣仅有的200美元来到美国,开始了他的SOLO 发明家的生活。他对小型摩托车,轮滑鞋和飞行设备有很多原创的想法。2003年,他在华盛顿的卡马斯小镇创立了INVENTIST公司。INVENTIST公司将陈先生对生活的灵感及梦想,按他自己的独特理想,设计、开发并制造出来。公司的目标就是开发那些充满未来感,揭示未来
《嵌入式系统技术》
《嵌入式系统技术》 实训报告 学期:日期:实训场所: 二级学院信息工程学院班级姓名学号实验题目实训五、C语言控制LED灯(走马灯) 1、实验目的 z熟悉A DS 开发环境调试环境。 z掌握简单的A RM 汇编指令的使用方法。 z掌握S3C2440A 的I/O 控制寄存器的配置。 z掌握A RM 汇编指令和C语言相互调用的方法 2、实验设备 z PC 机、ARM 仿真器、2440 实验箱、串口线。 3、实验内容 z熟悉A RM 开发环境的建立。 z使用A RM 汇编和C语言设置GPIO 口的相应寄存器。 z编写跑马灯程序。 4、实验原理 C 程序与汇编程序相互调用规则 为了使单独编译的 C 语言程序和汇编程序之间能够相互调用,必须为子程序间的调用规定一定的规则。ATPCS ,即ARM ,Thumb 过程调用标准(ARM/Thumb Procedure Call Standard),是ARM 程序和Thumb 程序中子程序调用的基本规则,它规定了一些子程序间调用的基本规则,如子程序调用过程中的寄存器的使用规则,堆栈的使用规则,参数的传递规则等。 下面结合实际介绍几种A TPCS 规则,如果读者想了解更多的规则,可以查看相关的 书 籍。
1.基本ATPCS 基本ATPCS 规定了在子程序调用时的一些基本规则,包括下面3方面的内容: (1)各寄存器的使用规则及其相应的名称。 (2)数据栈的使用规 则。 (3)参数传递的 规则。 相对于其它类型的ATPCS,满足基本A TPCS 的程序的执行速度更快,所占用的内存更少。但是它不能提供以下的支持:ARM 程序和Thumb 程序相互调用,数据以及代码的位置无关的支持,子程序的可重入性,数据栈检查的支持。 而派生的其他几种特定的ATPCS 就是在基本ATPCS 的基础上再添加其他的规则而 形成的。其目的就是提供上述的功能。 2.寄存器的使用规则 寄存器的使用必须满足下面的规则: (1) 子程序间通过寄存器R0~R3 来传递参数。这时,寄存器R0~R3 可以记作A0~A3。被调用的子程序在返回前无需恢复寄存器R0~R3 的内容。 (2) 在子程序中,使用寄存器R4~Rll 来保存局部变量。这时,寄存器R4~R11 可以记作V1~V8。如果在子程序中使用到了寄存器V1~V8 中的某些寄存器,子程序进入时必须保存这些寄存器的值,在返回前必须恢复这些寄存器的值;对于子程序中没有用到的寄存 器则不必进行这些操作。在Thumb 程序中,通常只能使用寄存器R4~R7 来保存局部变量。 (3) 寄存器R12 用作子程序间scratch 寄存器,记作I P。在子程序间的连接代码段中 常有这种使用规则。 (4) 寄存器R13 用作数据栈指针,记作SP。在子程序中寄存器R13 不能用作其他用途。寄存器SP 在进入子程序时的值和退出子程序时的值必须相等。 (5) 寄存器R14称为连接寄存器,记作LR。它用于保存子程序的返回地址。如果在子程序中保存了返回地址,寄存器R14则可以用作其他用途。 (6) 寄存器R15 是程序计数器,记作PC。它不能用作其他用途。 3.参数传递规则根据参数个数是否固定可以将子程序分为参数个数固定的 (nonvariadic)子程序和参数 个数可变的(variadic)子程序。这两种子程序的参数传递规则是不同 的。 (1)参数个数可变的子程序参数传递规则 对于参数个数可变的子程序,当参数不超过4个时,可以使用寄存器R0~R3 来传递参数;当参数超过4个时,还可以使用数据栈来传递参数。 在参数传递时,将所有参数看作是存放在连续的内存字单元中的字数据。然后,依次将各字数据传送到寄存器R0、R1、R2、R3 中,如果参数多于4个,将剩余的字数据传送到数据栈中,入栈的顺序与参数顺序相反,即最后一个字数据先入栈。按照上面的规则,一个浮点数参数可以通过寄存器传递,也可以通过数据栈传递,也可能一半通过寄存器传递,另一半通过数据栈传递。 (2)参数个数固定的子程序参数传递规则对于参数个数固定的子程序,参数传递与 参数个数可变的子程序参数传递规则不同。 如果系统包含浮点运算的硬件部件,浮点参数将按照下面的规则传 递: ·各个浮点参数按顺序处理。 ·为每个浮点参数分配FP 寄存器。