L298简介
L298简介
2010-05-23 06:41
L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相
和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准
TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且
可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,
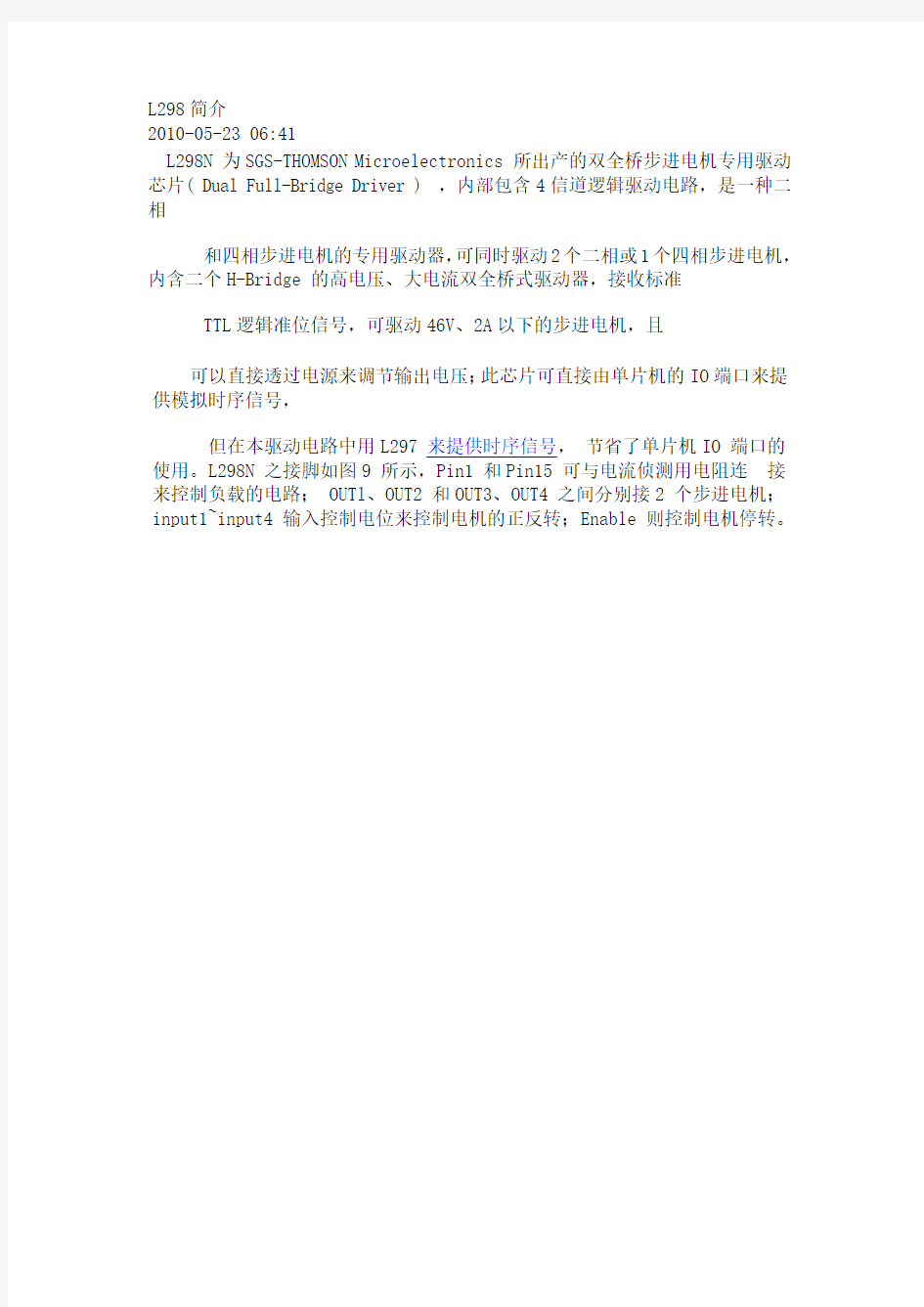
但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路; OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;
input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图
图10 L298 内部逻辑图L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值:
L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):
L298 ELECTRICAL CHARACTERISTICS(VS=42V;VSS=5V,Tj=25℃; unless
图11 L298 外形图
L297/L298组合应用实例:
297 加驱动器组成的步进电机控制电路具有以下优点:使用元件少,组件的损耗低,可靠性高体积小,软件开发简单,并且计算机(或单片机)硬件费用大大减少。L297与L298配合使用控制双极步进电机工作电流可达2.5A;如与L293E配套使用,步进电机绕组电流。图12为L297和 L298组成的控制驱动器的线路图。
L297的特性是只需要时钟、方向和模式输入信号。相位是由内部产生的,因此可减轻计算机(或单片机)和程序设计的负担。L298芯片是一种高压、大电流双H桥式驱动器。
L297和L298组合控制驱动的步进电机可用于如打印机的托架位置、记录仪的进给机构,以及打字机、数控机床、软盘驱动器、机器人、绘图机、复印机、阀门等设备和装置。
图12 L297/L298典型应用电路图
类别:默认分类 | | 添加到搜藏 | 分享到i贴吧 | 浏览(61) | 评论 (0)
上一篇:L297-L298中文资料介绍下一篇:旧上海老大杜月笙语录,很值得看
相关文章:
?基于L297和L298的步进电机驱动
器...
?用L298驱动直流减速电机
?关于L298和L293的的使用?L298电机驱动电路
?L298 驱动直流电机?S51单片机控制驱动芯片L298程序
?使用 C52和L298制作的寻迹小车(...?使用 C52和L298制作的寻迹小车(...
用L298驱动直流减速电机
2009-07-14 01:41
https://www.360docs.net/doc/602480846.html,/?fromuid=25235
前一段有个朋友让我帮忙做一个电机控制的小东西要求是:控制直流减速的电机
的启动、停止和正反转。起初我用4个N沟道IRF540N来做H桥驱动,发现H 桥并不能输出12V电压给电机并且上桥避MOS很热,因为以前没有做过H桥后来查资料才知道是MOS管没有完全饱和导通再加上管子压降,所以输出电压不够。要想解决问题就必须提高上臂GS电压,电源是12V,栅极就必须是24V
才能使上臂完全饱和导通。这样就必须提高电源,虽然有专用的桥驱动IC
IRF2401但是一片几十元价格最后我还是放弃这种方案,选用小功率的直流电机驱动芯片L298,这是一款常用驱动IC,内部有两组H桥,驱动电流2A,40V 正好满足我的要求(我的电机是直流12V15W),并且驱动电路简单。
接下来我用ATTiny13来驱动L298来控制直流减速电机,程序到是很简单,
但调试的时候又遇到了麻烦,搭好电路在运行的时候发现单片机有重启的现象,起初以为是电源功率不够电机启动拉低电源电压照成单片机重启,后来更换电源后问题依旧。既然不是电源问题,那就是有干扰信号影响单片机,我用示波器
来监视单片机跟L298连接控制线并有杂波信号过来,这很让我感到很疑惑。一位同事看后我的电路说:“是不是管子电流不够啊?”我这才发现我的电源桥式整流用的是IN4007,电机消除反相电动势的是4个二极管是1N5819,这些管子电流都是1A,而我的电机电流是1.2A的,因为当时手头有这两种管子于是就随手焊上去了。在更换更大功率的管子1N5408和1N5822后,连续运行两天一切正常,问题的原因在于器件的参数不对。
通过这次事情对于电机驱动我也总结了几点心得,以后再做这方面电路是值得注意的:
1.电机供电最好和单片机供电独立开来,中间加光耦隔离。防止电机通过回路干扰单片机。如果非要共用一个电源,那也要采取一些措施模拟地和数字地单点共地,采用0欧电阻或磁珠连接;
2.元件件的参数要留一定的富裕量,保证能可靠工作。IC器件VCC加104电容高频滤波;
3.PCB布线强弱电分开,尽量远离走线;
由于单片机程序比较简单就不在贴上来了,下面只放上原理图和实物图片:
肖特基二极管(SKY) IN5822,最反向峰值电压40V ,最大平均正向电流3.0A,最大正向电压0.525V
类别:智能小车 | | 添加到搜藏 | 分享到i贴吧 | 浏览(2212) | 评论 (0)
L298直流电机驱动板
2009-07-14 01:22
L298直流电机驱动板
终于完成了L298直流电机驱动板。嘿嘿,明天再加上L297,驱动步进电机!原理图:
经测试,直流电机正反转控制,调速,急停均成功。
完成后的实物图:
D1:11EQS06(肖特基二极管,2A)
D2:11EQS06(肖特基二极管,2A)
......
D7:11EQS06(肖特基二极管,2A)
D8:11EQS06(肖特基二极管,2A)
类别:智能小车 | | 添加到搜藏 | 分享到i贴吧 | 浏览(2819) | 评论 (4)
上一篇:关于L298和L293的的使用下一篇:用L298驱动直流减速电机
已有1人分享了这篇文章:
cheng_ok
Ta的转贴
L298 驱动直流电机
2008-06-13 19:53
本程序由AVR与虚拟仪器网站提供,免费共享,不记版权,欢迎转载,请注明出处。
网址:https://www.360docs.net/doc/602480846.html,论坛:https://www.360docs.net/doc/602480846.html,/bbs/
本程序通过测试,实现预期效果,如果你在使用中遇到问题,请在论坛交流。
程序编写整理:古欣
软件环境:icc+avrstudio
下载工具:PHYSICO AVR JTAG&stk500 仿真编程器
介绍:https://www.360docs.net/doc/602480846.html,/bbs/read.php?tid-61-page-e.html
硬件环境: mega32+N298,你可以选择我们提供的运动控制开发板。
硬件连结: 请参考硬件连接电路图.jpg
使用方法:直接将main.hex文件下载到单片机中就可以使用。你可以打开工程文件查看,motor.c已经是一个结构化的驱动程序,可以方便的调用。
更改连接:请打开motor.h更改以下内容即可。
//PD4,PD5 电机方向控制
#define moto_en1 PORTD |= 0x10
#define moto_en2 PORTD |= 0x20
#define moto_uen1 PORTD &=~ 0x10
#define moto_uen2 PORTD &=~ 0x20
软件核心介绍:
通过控制电机的IN1和IN2改变方向, pwm控制速度。IN1和IN2不同时,电机转动;
IN1和IN2相同时,电机急停。
硬件连接电路图
avr+N298控制电机输入信号与电机工作方式
N298电机控制芯片引脚图
电机控制资料包括所有电机控制例子源程序,L298数据手册,连接电路图。今天有人反映,程序有点小问题
程序中这里的IO初始化
void port_init(void)
{
PORTA = 0x00;
DDRA = 0x00;
PORTB = 0x00;
DDRB = 0x00;
PORTC = 0x00;
DDRC = 0x00;
PORTD = 0x00;
// DDRD = 0x80; // D7 PWM //参考芯片手册
//这里修改
DDRD =0xB0; //PD4 PD5 PD7 OUT
}
另外注意如果,启动时的PWM占空比太低电机是转不起来的,
void main(void)
{
/******************************************************************************/
//初始工作
/******************************************************************************/
init_devices();
while(1)
{
for_ward(0); //默认速度运转正
Delay1s(5); //延时5s
motor_stop(); //停止
Delay1s(5); //延时5s
back_ward(0); //默认速度运转反
Delay1s(5); //延时5s
speed_add(20); //加速
Delay1s(5); //延时5s
speed_subtract(20); //减速
Delay1s(5); //延时5s
}
}
及这里的for_ward(0); //默认速度运转正
如果改为for_ward(5);电机转不起来
这个网上搜来的
正好要用直流电机。。等下修改成汇编。大家下来用啊。免费哈
类别:mcu资料与设计 | | 添加到搜藏 | 分享到i贴吧 | 浏览(5620) | 评论 (4)
上一篇:淘宝网上的搞笑差评~~~下一篇:直流电机调速最近读者:
rainstonew
u
万用表
的使用
醉了流年gyq85010
1
lkh106Zane_Googl
e
pyg915断雪
return
网友评论:
1
淋淋花雨
2009-04-11 17:42 | 回复
挺好的分享
2
U小牛U
2009-05-16 22:09 | 回复
不错
3 网
友:123
2009-06-18 10:03 | 回复
请问用52怎么控制占空比??
4 网
友:123
2009-06-18 10:04 | 回复
汇编的
发表评论:
姓
名:
内
插入表情▼闪光字容:
验证
码:
Simple Power Supply and Charger Circuits
Figure 4 shows a simple power supply circuit. I have tested with K
ABO, it works fine. For those who have a big capacity rechargeable ba
ttery, the resistance value of R can be selected for approx. 10% outp
ut charging current. DC in can be higher if your battery voltage high
er than 8.4V, say. To ensure the output current is within the value c
alculated by R, measure DC current before. The maximum supply for LM3
17 is ~35V.
Figure 4: Circuit Diagram of battery supply +12V Alkaline and +8.4V NiMH with a constant current recharger circuit. For ~20mA, use R~60 Ohms. S1 is main switch for CP U and L293 circuits.
Using PAUL's Startup Header file with Micro-C