工业机器人实验指导书
工业机器人实验指导书
业机器人现场教学
实验一工业机器人认知部分
1.实验目的 1)了解各种机器人; 2)了解 FANUC ARC Mate 100iB 机器人系统组成; 3)介绍机器人试教编程,进行机器人动作演示;
2.实验器材 1)日本FANUC ARC Mate 100iB 焊接机器人一台,ABB机器人两台,众为兴机器人一台,导管架焊
接机器人一台,爬壁式机器人一台 2)工控计算机,ABE公司ROBOTSTUD离线编程软件一套
3.实验原理 1) Fanuc机器人简介
机器人的主要参数
FANU机器人本体型号为 ARC Mate M6iB,控制柜型号为M-6iB。机器人的具体性能参数如下: 轴数: 6 手部负重( kg ) :6 运动范围: 重复定位精度: 最大运动速度
FANUC机器人的安装环境环境温度 :0-45 摄氏度环境湿度 :普通 :75%RH 短时间 :85%(一个月之内)振动 :=0.5G(4.9M/s2)
FANUC机器人的编程方式在线编程离线编程
FANUC机器人的特色功能
High sensitive collision detector 高性能碰撞检测机能 , 机器人无须外加传感器
各种场合均适用
Soft float 软浮动功能用于机床工件的安装和取出 , 有弹性的机械手 .
Remote TCP 2)FANUC机器人的构成
FANUC机器人软件系统
Handling Tool 用于搬运
Arc Tool 用于弧焊
Spot Tool 用于点焊
Seali ng Tool 用于布胶 Pai nt Tool 用于油漆
Laser Tool 用于激光焊接和切割
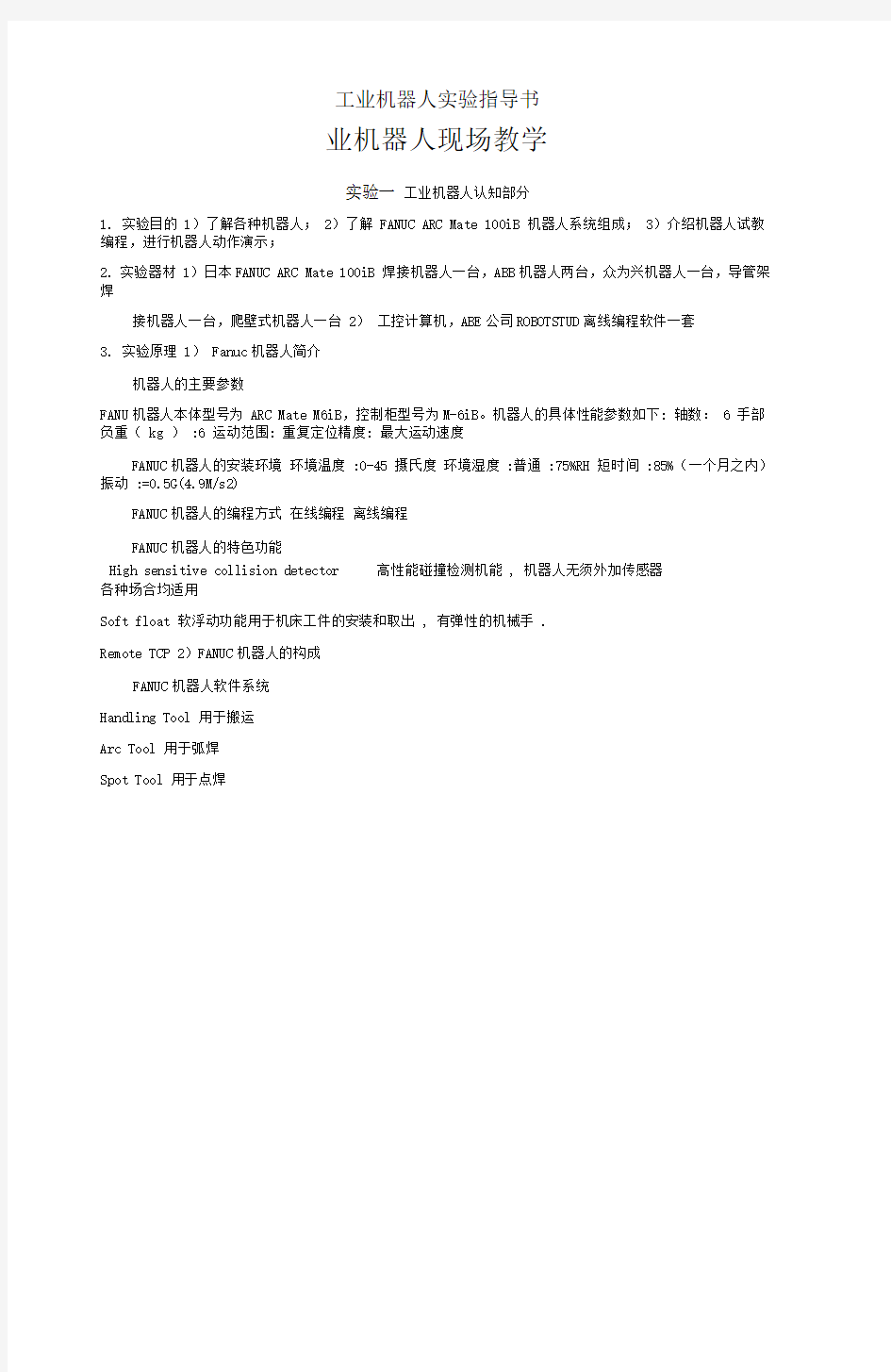
FANUC 机器人硬件系统
如图15所示,通用FANUC 机器人硬件系统包括:机器人本体、机器人控制柜、操纵台(或变位器)和 示教操作盒。
,1
(a ) FANUC 机器人组成
(b)
H I
机器人控制柜内部结构
图1 FANUC 机器人硬件系统
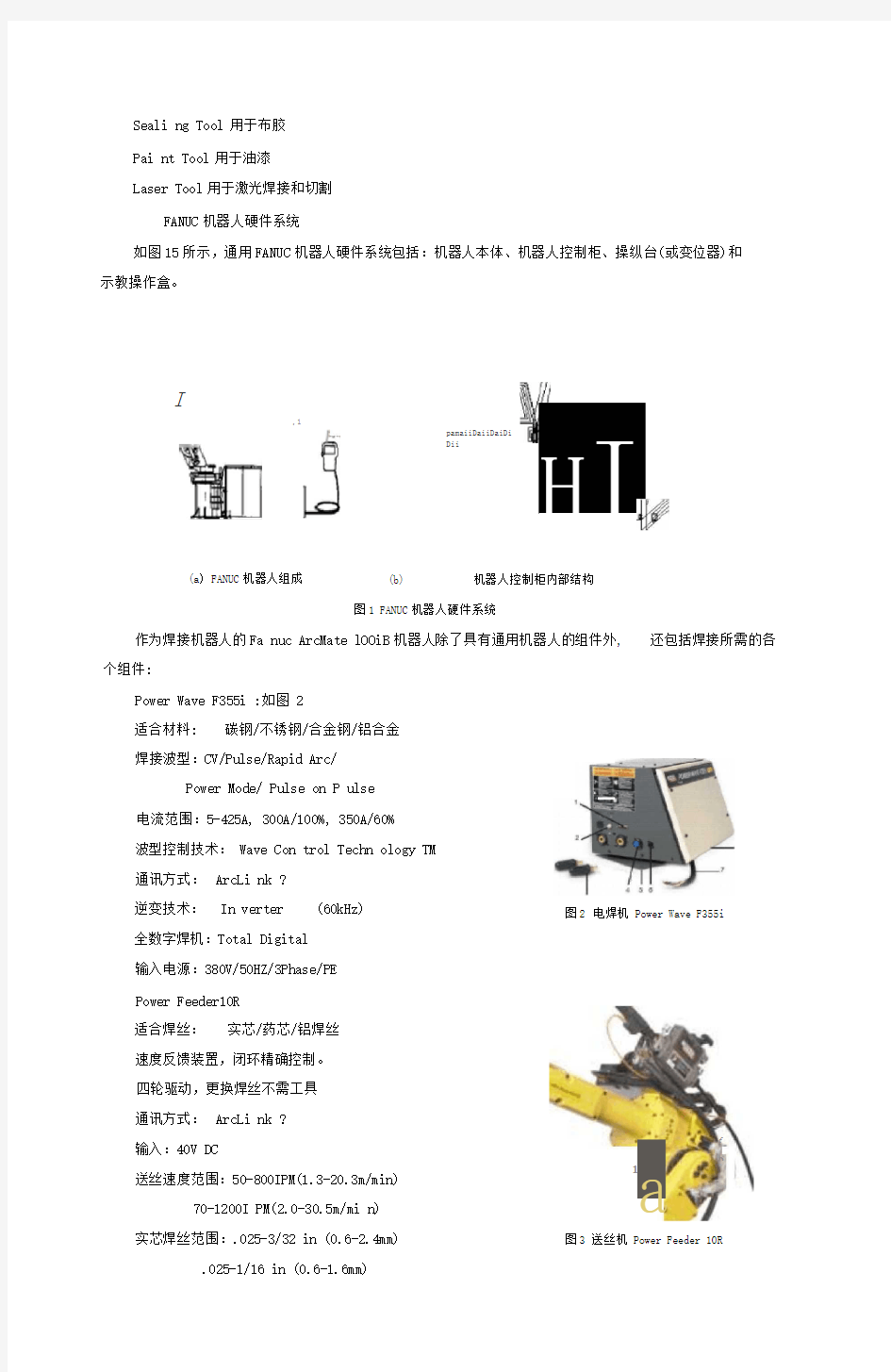
作为焊接机器人的Fa nuc ArcMate lOOiB 机器人除了具有通用机器人的组件外, 还包括焊接所需的各
个组件:
Power Wave F355i :如图 2 适合材料:
碳钢/不锈钢/合金钢/铝合金
焊接波型:CV/Pulse/Rapid Arc/
Power Mode/ Pulse on P ulse
电流范围:5-425A, 300A/100%, 350A/60% 波型控制技术: Wave Con trol Techn ology TM 通讯方式: ArcLi nk ? 逆变技术: In verter (60kHz)
全数字焊机:Total Digital 输入电源:380V/50HZ/3Phase/PE Power Feeder10R 适合焊丝:
实芯/药芯/铝焊丝
速度反馈装置,闭环精确控制。 四轮驱动,更换焊丝不需工具 通讯方式: ArcLi nk ? 输入:40V DC
送丝速度范围:50-800IPM(1.3-20.3m/min)
70-1200I PM(2.0-30.5m/mi n)
实芯焊丝范围:.025-3/32 in (0.6-2.4mm)
.025-1/16 in (0.6-1.6mm) I
pamaiiDaiiDaiDi Dii
电焊机 Power Wave F355i
图2 1
送丝机 图3 f
、
a
其上的主要按键和开关的功能如下:
紧急停止按键:此按钮被按下时,机器人立刻停止运动;
ON/OFF 开关:ON : TP 有效;OFF: TP 无效。当TP 无效时,示教、编程及手动不能被使用
Dead Man 开关:当TP 有效时,只有Dead Man 开关被按到适中位置,机器人才能运动,一旦松开 或者按
紧,机器人立即停止运动,并出现报警。
TP 的作用
TP 的作业包括:点动机器人,编写机器人程序,试运行程序,生产运行和查阅机器人的状态( 置,位置,焊接电流)。
认识TP 上的操作键
TP 上各操作键的分布如图 6所示。
药芯焊丝范围: .035-.120 in. (0.9-3.0mm)
?035-5/64 in (0.9-2.0mm)
Tough Gun 500A (泰霸)
焊丝: 碳钢/不锈钢,实芯/药芯,0.1.6mm 电流:500A/100%/C02, 350A/100%/Ar 混合气 焊枪角度:22o, 45o, 180 o
开关
I/O 设
Dead Man
3)认识 TP( Teach Pen da nt) 如图 5 所示。
图5机器人示教盒
屏 晶 液
停键 急按 紧止
咅
T
'EACH '
ton
、
fcm
1
k
__ :
F2
F3
F4
F5
H
B
FTEM
-Y K +Y (J2)
(J2)
5
叵
3
WFLI.I)
kNBl.
WIRE
十
WIRF
岡I 金II 忌
050
Fgf snru$
MOVk MENl
a H
皑
图6 TP 上各操作键的分布
具体各个按键的功能如下:
RESET 键(复位键)
按此键清除报警信息。
SHIFT 键:与其他键配合使用执行特定功能。
Jog 键:使用这些键来点动机器人。
一 Z
M3J
■ ■,
□35
-¥
广 ' 匚耳
1
-
Z :J 引
COORD 键:) 。如图7所示,坐标系
有关节坐标系(Joi nt ),直角坐标系(World ),工具坐标系(Tool )和其它坐标系。
MAN FCTX
SHIFT
+ Z
{ JC
机器人在不同坐标系下示教
速度键:用这些键来调整机器人的运动速度。
SELECT 键:显示程序清单
EDIT 键:显示当前使用或编写的程序
DATA 键:显示 weld schedules, weld processes, weave schedules, TorchMate data
NEXT 键: 按下该键显示更多的对应于
F1-F2-F3-F4-F5按键的功能键。
小数点(.),逗号(,)
确认键:使用该键确认一个数值的输入,或者从一个菜单中确认选择一个项目。
连续运行程序时,使用该键驱使机器人开始执行编好的程序。 BWD 后退)键:用该键执行排在光标前面的程序语句。
WELD ENBL 键:运行一个程序时,使用该键来控制是否开启焊接过程
焊丝运动键:Wire “+” 使焊丝经由焊枪送出, Wire “-” 使焊丝经由焊枪回抽。
工貝坐诵示孰
E ? TEACH £0*1
DATA
程序键:用这些键来选择编程时的菜单选项。
F1 F2 F3 F4 F5]功能键:
使用这些键根据屏幕显示执行指定的功能和操作。
数字键: 这些键用来输入数值:0, 1, 2, 3, 4, 5, 6, 7, 8, 9,
减号(-),
STEP 键:在T1 或T2模式中,使用该键在以下两种执行模式间切换:
单步模式 (每次执行程序中的一行) 连续模式 (连续运行程序)
FWD (前进) 键:在STE 肝启时使用该键来执行下一个程序语句。
U1 th
E\BL
WTRF
rrtM
ITEM 键:用该键 在一个列表中选择一个项目
7
关节坐标示孰
ft
F
*
2)
4. 1) 实验内容与实验步骤 (以老师讲解, 开机
学生参观为主)
打开机器人控制柜的断路开关,按住 “ ON 按钮几秒钟,示教盒的开机画面将会显示出来; 手持示教盒,按下并且始终握住“ Dead man switch ”,将示教盒上的开关打到“
Oh”的位置;
在示教盒键盘上找到“ STEP 键,
按一下并确认左上部的“ STEP 状态指示灯亮,此时屏幕顶
端右面的蓝色状态行应该为 -Joi nt 10%。 关节坐标模式(Joi nt Coordi nate)下移动机器人 按下并保持“ SHIFT”,在配合其他方向键移动机器人。
例1:要在一个TP 程序列表中选择一行,按下ITEM,输入要选行的编号后按下 ENTER
例2:要在一个System Variables 清单中选择一行,按下ITEM 键,输入要选行的编号后按下
ENTER
BACK SP ACE 键:使用该键能依次删除光标前的字母和数字 PREV 键:用该键能显示上一级屏幕界面
MENU 键:用该键显示菜单屏幕:下面是按下 MENU 后出现的列表:
ABORT (ALL):强制中断正在执行或暂停的程序
Disable FWD/BWD :使用TP 执行程序时,选择 FWS/BWD 是否有效 CHANGE GRO UP :改变组 QUICK/FULL MENUS
:在快速菜单和完整菜单之间选择
SAVE :保存当前屏幕中相关的数据到软盘中 P RINT SCREEN :打印当前屏幕的数据
2.TEST CYCLE > :为测试操作指定数据
3.MANUAL FCTNS > :执行宏指令
4.ALARM > :显示报警历史和详细信息
5.I/O > :显示和手动设置输出,仿真输入 /输出,
6.SET UP > :设置系统
7.FILE > :读取或存储文件
https://www.360docs.net/doc/614310010.html,ER :显示用户信息
9.SELECT :列出和创建程序 10.EDIT :编辑和执行程序
11.DATA > :显示寄存器、位置寄存器和堆码寄存器的值 12.STATUS > :显示系统和弧焊状态 13. POSITION :显示机器人当前的位置 14.SYSTEM >
:设置系统变量,Masteri ng
15.BROWSER
:浏览网页,只对 :显示提示
分配信号
iPendant 有效
〔?UTILITIES >
HOLD FCTN fCTli
用该键可停止机器人的运动 用该键显示补充菜单,按下
FCTN 键后出现的典型项目
通过示教盒上的“ +%'和“ -%”键进行调节(或同时 配合“ SHIFT ”进行大范围的调节),为 了安全起见,在开始的时候尽量以较低的速度移动机器人,并确认不会发生碰撞时,再适当的 提高移动速度。 3)直角坐标模式下移动机器人
松开 “ SHIFT ”键,在键盘上找到并按“ COORD 键直到蓝色的状态栏显示“ World ”。(注意,
此时再移动机器人时 , 机器人不再单轴(单关节)转动。而是:当按前面三组 器人的TCP 以直线运动;当按后面三组J4, J5 , J6键时,机器人的TCP 固定不动绕相应的直线坐标轴旋 转。
一直按住“ J3, +Z ” 键, 第三轴提升到一定程度将自动停止继续往上升,此时,在屏幕顶部 的信息提示栏中应该有限位或者位置不可达的报警提示,按“ RESET 键消除报警;
按住“ J3, -Z ”键使第三轴往回运动。 认识 Dead-Man/E-Stop 开关作用 当释放“ Dead-Man” 开关, 状态信息栏中就会有报警信息, 要消除报警只要重新按住并保持住, 报警信息将自动消失。
“Dead -Man” 开关是个 3 位开关,按压力太大也会导致报警。 急停按钮的使用
按一下示教盒右上方红色的“
E-STOP 急停按钮,在屏幕的状态信息显示栏中会有急停报警。
注意:在进行急停或复位急停操作时,除了可以听得到第二轴和第三轴的抱闸声音,还可以听 到机器人控制柜内部断路器的跳闸声音。
5. 思考题(选作) 简述工业机器人的定义,说明 FANUC 机器人的的主要特点是什么? 机器人为几自由度机器人?主要有哪几个关节?分别可作什么样的运动?切换了示教模式之后机器人移动速度会自动降低到
10%。)
J1,J2,J3 键时,机 4) 认识轴的软件限位
5)
6) 要复位该信息,只需顺时针旋转使按钮复位,再按“
RESET 键复位即可。
1) 2)
3) 工业机器人与数控机床有什么区别? 4) 说明工业机器人的基本组成与主要特点。