柱坐标及球坐标下导热微分方程的推导及分析
柱坐标及球坐标下导热微分方程的
推导及分析
哈尔滨工业大学市政学院
摘要:运用热力学第一定律,建立温度场,利用微分方程在不同坐标系的不同形式进行分析问题
关键词:柱坐标 球坐标 导热微分方程
1.柱坐标系下导热微分方程
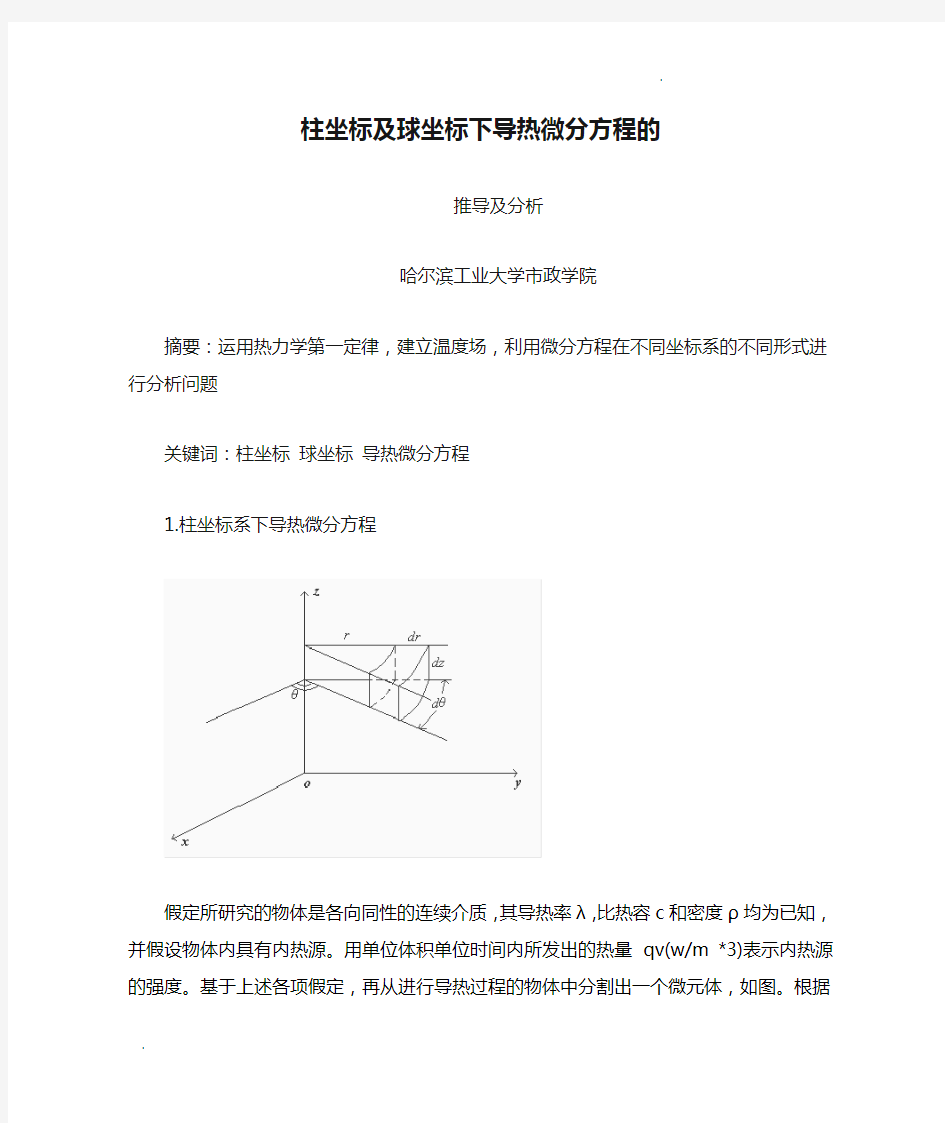
假定所研究的物体是各向同性的连续介质,其导热率λ,比热容c 和密度ρ均为已知,并假设物体内具有内热源。用单位体积单位时间内所发出的热量 qv(w/m *3)表示内热源的强度。基于上述各项假定,再从进行导热过程的物体中分割出一个微元体,如图。根据热力学第一定律,对微元体进行热平衡分析,那么在d τ时间内导入和导出微元体的净热量,加上内热源的发热量,应等于微元体热力学能的增加,即
导入与导出微元体的净热量(Ⅰ)+微元体内热源的发热量(Ⅱ)=微元体中热力学能 的增加(Ⅲ)
下面分别计算式中Ⅰ、Ⅱ、Ⅲ三项:
在 dτ时间内,沿 r 轴方向:
τ?λτ?λdzd rd r
t d dzd rd q r r
t r ??-=Φ∴-=?? τ?dzd rd q r r =Φ
τ?λdzd drd r
t r r d d r dr d d dr r r r r dr r )(????=Φ-Φ∴?Φ?=Φ-Φ++ ○1 在 dτ时间内,沿 ?轴方向:
τ?
λ?
λτ
????drdzd t r t r q drdzd q ??-=Φ∴??-==Φ11 τ??λ??
????????dzd drd t r d d d )1(????=Φ-Φ∴?Φ?=Φ-Φ++ ○
2 在 dτ时间内,沿 z 轴方向:
τ?λλτ
?drd rd z
t z
t q drd rd q z z z z ??-=Φ∴??-==Φ τ?λdzd drd z
t r z z dz dz z z z z dz z )(????=ΦΦ∴?Φ?=Φ-Φ+-+ ○3 将 r 、Φ、z 三个方向导入和导出微元体的净热量相加得到 :
I=○1+○2+○3
在 dτ时间内,微元体中内热源的发热量为
Ⅱ=dzdr rdrd q v ?
在 dτ时间内,微元体中热力学能的增量为
Ⅲ=τ?τ
ρdzd rdrd t c ?? 联立I ,III ,II 可得导热微分方程在圆柱坐标下的公式:
)()(1)(12z
t z t r r t r r r r q t c
v ????+????+????+=??λ?λ?λτρ
2.球坐标系下导热微分方程
在球坐标系中,从进行导热过程的物体中分割出一个微元体。
在 dτ时间内,沿 r 方向导入和导出微元体的净热量 :
τθ?θλλτ
θ?θd d drd r
t r r r
dr r t q d d d r q dr r r r r dr r r r r )sin (sin 22????=ΦΦ∴?Φ?=Φ-Φ??-==Φ+-+且 ○1 在 dτ时间内,沿 ?方向导入和导出微元体的净热量 :
τθ??θλ????
θλ
θ??????????d d drd t d t
r q dz
rdrd q d d )sin 1(sin 1????=Φ-Φ∴?Φ?=Φ-Φ??-==Φ++且 ○2 在 dτ时间内,沿 θ方向导入和导出微元体的净热量 :
τθ?θθλθθ
θθ
λ
τ
?θθθθθθθθθθθd d drd t d t
r q d drd r q d d )sin (1sin ????=Φ-Φ∴?Φ?=Φ-Φ??-==Φ++且 ○3 将 r 、?、θ三个方向导入和导出微元体的净热量相加得到 :
I=○1+○2+○3
在 dτ时间内,微元体中内热源的发热量为
Ⅱ=τθ?θd d drd r q v sin 2
在 dτ时间内,微元体中热力学能的增量为
Ⅲ=τθ?θτ
ρd d drd r t c sin 2?? 联立I ,II ,III 可得导热微分方程在圆球坐标下的公式:
)sin (sin 1)(sin 1)(122222θ
θλθθ?λ?θτλτρ????+????+????+=??t r t r t r r r q t c v 3.总结
得出当分析同一个问题时,有多种不同的分析方法。使用不同的分析方法会使我们分析问题的过程不一样,但是不会影响问题分析的结果。遇到不同的情况就要选择不同的分析方法。就上述问题而言,当分析的对象是一般平面物体,选择直角坐标系比较方便。但是当所分析的对象为轴对称物体(圆柱,圆筒或圆球),采用柱坐标系或球坐标系更为方便。
参考文献
1.传热学(第六版) 章熙民 朱彤 中国建筑工业出版社
2.工科数学分析 哈尔滨工业大学数学系分析教研室 高等教育出版社
高中数学1.4柱坐标系与球坐标系简介教案新人教版选修4-4
四柱坐标系与球坐标系简介 课题:球坐标系与柱坐标系 教学目的: 知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法 能力目标:了解柱坐标、球坐标与直角坐 标之间的变换公式。 德育目标:通过观察、探索、发现的创造性过程,培养创新意识。 教学重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系 教学难点:利用它们进行简单的数学应用 授课类型:新授课 教学模式:启发、诱导发现教学? 教 具:多媒体、实物投影仪 教学过程: 一、复习引入: 情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度。 问题:如何在空间里确定点的位置?有哪些方法? 学生回顾 在空间直角坐标系中刻画点的位置的方法 极坐标的意义以及极坐标与直角坐标的互化原理 二、讲解新课: 1、球坐标系 设P 是空间任意一点,在 oxy 平面的射影为 Q,连接OR 记| OP |= r ,OP 与0Z 轴正 向所夹的角为 ,P 在oxy 平面的射影为 Q, Ox 轴按逆时针方向旋转到 0Q 时所转过的最小 正角为 ,点P 的位置可以用有序数组 (r,,)表示,我们把建立上述对应关系的坐标系叫 球坐标系(或空间极坐标系) 有序数组(r,,)叫做点P 的球坐标,其中 空间点P 的直角坐标(x, y, z )与球坐标(r, 2 x 2 y 2 2 z r x rsi n cos y r si n sin z r cos 2、柱坐标系 有序数组(p , 9 ,Z )叫点P 的柱坐标,其中p 》0, 0 <9 <2n , z € R 空间点P 的直角坐标(x, y, z )与柱坐标(p , 9 ,Z )之间的变换关系为: x cos y sin r > 0, 0< < , o w v 2 。 ,)之间的变换关系为: 设P 是空间任意一点,在oxy 平面的射影为 平面oxy 上的极坐标,点P 的位置可用有序数组 系叫做柱坐标系 Q 用(P , 9 )( P> 0,0 <0 <2n )表示点在 (p , 9 ,Z )表示把建立上述对应 关系的坐标
高中数学第一讲坐标系四柱坐标系与球坐标系简介1柱坐标系学案含解析新人教A版选修4_4
1.柱坐标系 柱坐标系 (1)定义:建立空间直角坐标系Oxyz ,设P 是空间任意一点,它在Oxy 平面上的射影为 Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面Oxy 上的极坐标,这时点P 的位置可用有 之间的)z ,θ,ρ(表示.这样,我们建立了空间的点与有序数组R)∈z ()z ,θ,ρ(序数组一种对应关系.把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z )叫做点 R. ∈z ,2π<θ≥0,0≤ρ,其中)z ,θ,ρ(P 的柱坐标,记作P (2)空间点P 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )之间的变换公式为 ???? ? x =ρcos θ,y =ρsin θ,z =z. 由公式求出ρ,再由tan θ=y x 求θ. 由公式???? ? x =ρcos θ,y =ρsin θ, z =z , 得ρ2=x 2+y 2 , 即ρ2 =12 +(3)2 =4,∴ρ=2. tan θ=y x =3, 又x >0,y >0,点在第一象限.∴θ=π 3 , ∴点A 的柱坐标为? ?? ??2,π3,5. 已知点的直角坐标,确定它的柱坐标关键是确定ρ和θ,尤其是θ,要注意求出tan θ后,还要根据点所在象限确定θ的值(θ的范围是 已知点P 的柱坐标为? ?? ??4,π3,8, 求 它的直角坐标. 直接利用公式求解.
由变换公式???? ? x =ρcos θ,y =ρsin θ, z =z 得 x =4cos π 3 =2,y =4sin π3 =23,z =8. ∴点P 的直角坐标为(2,23,8). 已知柱坐标,求直角坐标,利用变换公式 ???? ? x =ρcos θ,y =ρsin θ,z =z 即可. 3.点N 的柱坐标为? ?? ??2,π2,3,求它的直角坐标. 解:由变换公式???? ? x =ρcos θ,y =ρsin θ, z =z , 得 x =ρcos θ=2cos π 2 =0,y =ρsin θ=2sin π2 =2, 故点N 的直角坐标为(0,2,3). 4.已知点A 的柱坐标为(1,π,2),B 的柱坐标为? ?? ??2,π2,1,求A ,B 两点间距离. 解:由x =ρcos θ,得x =cos π=-1. 由y =ρsin θ,得y =sin π=0. ∴A 点的直角坐标为(-1,0,2). 同理,B 点的直角坐标为(0,2,1). ∴|AB |= -1- +- + - = 6. 故A ,B 两点间的距离为 6. 课时跟踪检测(五) 一、选择题 1.设点M 的直角坐标为(1,-3,2),则它的柱坐标是( ) A.? ????2,π3,2 B.? ????2,2π3,2 C.? ????2,4π3,2 D.? ?? ??2,5π3,2
柱坐标系与球坐标系的简介
四、柱坐标系与球坐标系简介 一、导学目标: 知识与技能:借助具体实例了解在柱坐标系、球坐标系中刻画空间中点的位置的方法; 过程与方法: 与空间直角坐标系中刻画点的位置的方法相比较,体会它们的区别。 情感态度与价值观::类比法的建立方法,蕴藏了对立统一的辩证唯物主义思想。 导学重点:柱坐标系、球坐标系概念的理解与应用 导学难点:用柱坐标、球坐标表示空间的点 二、导学策略: 教学方法:探究法、讲授法 教学手段:多媒体辅助教学 三、教学过程: (一)、课程导入: 建立平面(或空间)直角坐标系后,平面上(或空间)的点可以用直角坐标表示;建立极坐标系后,平面上的点可以用极坐标表示。类似地,是否建立空间极坐标系,用极坐标表示空间的点呢? (二)、新知探究: 1
2 1、阅读本节知识,回答以下问题: 1)柱坐标系的定义?如何用柱坐标系描述空间的点? 2)球坐标系的定义?如何用球坐标系描述空间的点? 2、探究结果: 1)、设P 是空间任意一点,在oxy 平面的射影为Q , 用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在平面oxy 上的 极坐标。点P 的位置可用有序数组(ρ,θ,Z)表示。 把建立上述对应关系的坐标系叫做柱坐标系。 有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, -∞<Z <+∞ 柱坐标系又称半极坐标系,它是由平面极坐标系及空间直角坐标系中的一部 分建立起来的. 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为: cos sin x y z z ρθρθ=?? =??=? 2)、设P 是空间任意一点,在oxy
柱坐标系与球坐标系的简介第一八版
四、 柱坐标系与球坐标系简介 一、导学目标: 知识与技能: 借助具体实例了解在柱坐标系、球坐标系中刻画空间中点的位置的方法; 过程与方法: 与空间直角坐标系中刻画点的位置的方法相比较,体会它们的区别。 情感态度与价值观::类比法的建立方法,蕴藏了对立统一的辩证唯物主义思想。 导学重点:柱坐标系、球坐标系概念的理解与应用 导学难点:用柱坐标、球坐标表示空间的点 二、导学策略: 教学方法:探究法、讲授法 教学手段:多媒体辅助教学 三、教学过程: (一)、课程导入: 建立平面(或空间)直角坐标系后,平面上(或空间)的点可以用直角坐标表示;建立极坐标系后,平面上的点可以用极坐标表示。类似地,是否建立空间极坐标系,用极坐标表示空间的点呢? (二)、新知探究: 1、阅读本节知识,回答以下问题: 1)柱坐标系的定义?如何用柱坐标系描述空间的点? 2)球坐标系的定义?如何用球坐标系描述空间的点? 2、探究结果: 1)、设P 是空间任意一点,在oxy 平面的射影为Q , 用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在平面oxy 上的 极坐标。点P 的位置可用有序数组(ρ,θ,Z)表示。 把建立上述对应关系的坐标系叫做柱坐标系。 有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, -∞<Z <+∞ 柱坐标系又称半极坐标系,它是由平面极坐标系及空间 直角坐标系中的一部 分建立起来的. 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为: cos sin x y z z ρθρθ=??=??=? 2)、设P 是空间任意一点,在oxy 平面的射影 为Q 。连接OP ,记| OP |=r ,OP 与OZ 轴正向所 夹的角为φ,P 在oxy 平面的射影为Q 。 Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为 θ,点P 的位置可以用有序数组(r,φ,θ)表示,我们把 建立上述对应关系的坐标系叫球坐标系(或空间极坐标系)。有序数组(r,φ,θ)叫做点P 的球坐标,其中, 0,0,02r ?πθπ≥≤≤≤< 。 空间点P 的直角坐标(x, y, z)与球坐标(r,φ,θ)之间的变换关系为:
柱坐标系与球坐标系
柱坐标系与球坐标系 1、柱坐标系 设P 是空间任意一点,在oxy 平面的射影为Q , 用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面oxy 上的极坐标, 点P 的位置可用有序数组(ρ,θ,z)表示. 把建立上述对应关系的坐标系叫做柱坐标系. 有序数组(ρ,θ,Z)叫点P 的柱坐标,记作(ρ,θ,Z). 其中ρ≥0, 0≤θ< 2π, -∞<Z <+∞ 2,柱坐标系又称半极坐标系,它是由平面极坐标系 及空间直角坐标系中的一部分建立起来的. 空间点P 的直角坐标(x, y, z)与柱坐标 (ρ,θ,Z) 之间的变换公式为: 3 应用:例1:设点的直角坐标为(1,1,1),求它:在柱坐标系中的坐标. 解得ρ= ,θ= 点在柱坐标系中的坐标为 ( , ,1). 注:求θ时要注意角的终边与点的射影所在位置一致。 练习: 1、设点的直角坐标为(1,1,1),求它在柱坐标系中的坐标. 注:求θ时要注意角的终边与点的射影所在位置一致。 3,柱坐标系: r 为常数 圆柱面 半平面 平 面 x y z o P(ρ,θ,Z) Q θ 4π?? ???===z z y x θρθρsin cos ?? ???===z 1sin 1cos 1θρθρ224π?),,(z y x M ),(θr P ?θr z x y z o 点在柱坐标系中的坐标为(2,,1)4π求它的直角坐标。的柱坐标为、设点),7,6,2(2πM (3,1,7) 为常数θ为常数z
球坐标系 1,球坐标系: 设P 是空间任意一点,在oxy 平面的射影为Q , 连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为φ. 设P 在oxy 平面上的射影为Q , Ox 轴按逆时 针方向旋转到OQ 时所转过的最小正角为θ. 这样点 P 的位置就可以用有序数组(r,φ,θ)表示. 空间的点与有序数组(r,φ,θ)之间建立了一种对应关系. 我们把建立上述对应关系的坐标系叫做球坐标系 (或空间极坐标系) . 有序数组(r,φ,θ)叫做点P 的球坐标, 2 , 空间点P 的直角坐标(x, y, z)与球坐标(r,φ,θ)之间的变换关系为; 3 应用:例:设点的球坐标为(2, , ) 求它的直角坐标.? 点在直角坐标系中的坐标为( -1 ,1 ,- ). 4 小结: 数轴 平面直角坐标系 坐标系 平面极坐标系 空间直角坐标系 柱坐标系 球坐标系 坐标系是联系形与数的桥梁,利用坐标系可以实现几何问题与代数问题的相互转化, 从而产生了坐标法. y o P Q X Z 其中 πθπ?20,0,0<≤≤≤≥r x y z o P(r,φ,θ) Q θ r φ 称为高低角 -的方位角,被测点称为 球坐标中的角应用,在测量实践中,文学中有着广泛的球坐标系在地理学、天 ?θ?θ090),,(r P ?? ???===?θ?θ?cos sin sin cos sin r z r y r x 43π43π22222r z y x =++) ,,(为直角坐标。 、将下列点的球坐标化例65381ππM
柱坐标系与球坐标系简介教案
四 柱坐标系与球坐标系简介 课题:球坐标系与柱坐标系 教学目的: 知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法 能力目标:了解柱坐标、球坐标与直角坐标之间的变换公式。 德育目标:通过观察、探索、发现的创造性过程,培养创新意识。 教学重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系 教学难点:利用它们进行简单的数学应用 授课类型:新授课 教学模式:启发、诱导发现教学. 教 具:多媒体、实物投影仪 教学过程: 一、复习引入: 情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度。 问题:如何在空间里确定点的位置?有哪些方法? 学生回顾 在空间直角坐标系中刻画点的位置的方法 极坐标的意义以及极坐标与直角坐标的互化原理 二、讲解新课: 1、球坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为θ,P 在oxy 平面的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为?,点P 的位置可以用有序数组),,(?θr 表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系) 有序数组),,(?θr 叫做点P 的球坐标,其中r ≥0,0≤θ≤π,0≤?<2π。 空间点P 的直角坐标),,(z y x 与球坐标),,(?θr 之间的变换关系为: ???????====++θ ?θ?θcos sin sin cos sin 2 222r z r y r x r z y x 2、柱坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在 平面oxy 上的极坐标,点P 的位置可用有序数组(ρ,θ,Z)表示把建立上述对应关系的坐标系叫做柱坐标系 有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, z ∈R 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为: ?? ???===z z y x θ ρθρsin cos
人教A版高中数学选修4-4同步练习-柱坐标系与球坐标系简介
第一讲 坐标系 四、柱坐标系与球坐标系简介 A 级 基础巩固 一、选择题 1.在柱坐标中,方程ρ=2表示空间中的( ) A .以x 轴为中心轴,底半径为2的圆柱面 B .以y 轴为中心轴,底半径为2的圆柱面 C .以z 轴为中心轴,底半径为2的圆柱面 D .以原点为球心,半径为2的球面 解析:由柱坐标的几何意义可知,方程ρ=2表示以z 轴为中心,底面半径为2的圆柱面. 答案:C 2.若点M 的球坐标为? ?? ?? 8,π3, 5π6,则它的直角坐标为( ) A .(-6,23,4) B .(6,23,4) C .(-6,-23,4) D .(-6,23,-4) 解析:由x =8sin π3cos 5π 6=-6, y =8sin π3sin 5π 6 =23, z =8cos π 3=4,得点M 的直角坐标为(-6,23,4). 答案:A 3.设点M 的直角坐标为(2,0,2),则点M 的柱坐标为( )
A .(2,0,2) B .(2,π,2) C .(2,0,2) D .(2,π,2) 解析:设点M 的柱坐标为(ρ,θ,z ), 所以ρ=x 2 +y 2 =2,tan θ=y x =0, 所以θ=0,z =2,所以点M 的柱坐标为(2,0,2). 答案:A 4.空间点P 的柱坐标为(ρ,θ,z ),关于点O (0,0,0)的对称的点P 的坐标为(0<θ≤π)( ) A .(-ρ,-θ,-z ) B .(ρ,θ,-z ) C .(ρ,π+θ,-z ) D .(ρ,π-θ,-z ) 解析:点P (ρ,θ,z )关于点O (0,0,0)的对称点为P ′(ρ,π+θ,-z ). 答案:C 二、填空题 5.空间点P 的柱坐标为? ?? ??6,π 3,4,则点P 关于z 轴的对称点 为________. 答案:? ?? ??6,4π 3,4 6.已知点M 的球坐标为? ???? 4,π4,3π4,则它的直角坐标为_______,它的柱坐标是________. 答案:(-2,2,22) ? ?? ??22,3π4,22 7.已知在柱坐标系中,点M 的柱坐标为? ?? ??2,2π 3,5,且点M 在数轴Oy 上的射影为N ,则|OM |=________,|MN |=________.
球坐标系与柱坐标系
4.1.3球坐标系与柱坐标系 1.球坐标系、柱坐标系的理解. 2.球坐标、柱坐标与直角坐标的互化. [基础·初探] 1.球坐标系与球坐标 (1)在空间任取一点O作为极点,从O点引两条互相垂直的射线Ox和Oz作为极轴,再规定一个长度单位和射线Ox绕Oz轴旋转所成的角的正方向,这样就建立了一个球坐标系. 图4-1-5 (2)设P是空间一点,用r表示OP的长度,θ表示以Oz为始边,OP为终边的角,φ表示半平面xOz到半平面POz的角,则有序数组(r,θ,φ)就叫做点P 的球坐标,其中r≥0,0≤θ≤π,0≤φ<2π. 2.直角坐标与球坐标间的关系 图4-1-6 若空间直角坐标系的原点O,Ox轴及Oz轴,分别与球坐标系的极点、Ox 轴及Oz轴重合,就可以得到空间中同一点P的直角坐标(x,y,z)与球坐标(r,θ,φ)之间的关系,如图4-1-6所示.
x 2+y 2+z 2=r 2, x =r sin_θcos_φ, y =r sin_θsin_φ, z =r cos_θ. 3.柱坐标系 建立了空间直角坐标系O -xyz 后,设P 为空间中任意一点,它在xOy 平面上的射影为Q ,用极坐标(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面xOy 上的极坐标,这时点P 的位置可以用有序数组(ρ,θ,z )(z ∈R )表示,把建立上述对应关系的坐标系叫柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R . 图4-1-7 4.直角坐标与柱坐标之间的关系 ??? x =ρcos θ, y =ρsin θ,z =z . [思考·探究] 1.空间直角坐标系和柱坐标系、球坐标系有何联系和区别? 【提示】 柱坐标系和球坐标系都是以空间直角坐标系为背景,柱坐标系中一点在平面xOy 内的坐标是极坐标,竖坐标和空间直角坐标系的竖坐标相同;球坐标系中,则以一点到原点的距离和两个角(高低角、极角)刻画点的位置.空间直角坐标系和柱坐标系、球坐标系都是空间坐标系,空间点的坐标都是由三个数值的有序数组组成. 2.在空间的柱坐标系中,方程ρ=ρ0(ρ0为不等于0的常数),θ=θ0,z =z 0分别表示什么图形?
数学教案(球坐标系与柱坐标系)
课题:球坐标系与柱坐标系 教学目的: 知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法 能力目标:了解柱坐标、球坐标与直角坐标之间的变换公式。 德育目标: 教学重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系 教学难点:利用它们进行简单的数学应用 授课类型:新授课 教学模式:启发、诱导发现教学. 教 具:多媒体、实物投影仪 教学过程: 一、复习引入: 情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度。 问题:如何在空间里确定点的位置?有哪些方法? 学生回顾 在空间直角坐标系中刻画点的位置的方法 极坐标的意义以及极坐标与直角坐标的互化原理 二、讲解新课: 1、球坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为θ,P 在oxy 平面的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为?,点P 的位置可以用有序数组),,(?θr 表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系) 有序数组),,(?θr 叫做点P 的球坐标,其中r ≥0,0≤θ≤π,0≤?<2π。 空间点P 的直角坐标),,(z y x 与球坐标),,(?θr 之间的变换关系为: ???????====++θ ? θ?θcos sin sin cos sin 2 222r z r y r x r z y x 2、柱坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在 平面oxy 上的极坐标,点P 的位置可用有序数组(ρ,θ,Z)表示把建立上述对应关系的坐标系叫做柱坐标系 有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, z ∈R 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为: ?????===z z y x θρθ ρsin cos
球坐标系与柱坐标系
球坐标系与柱坐标系 教学目的: 知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法 能力目标:了解柱坐标、球坐标与直角坐标之间的变换公式。 教学重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系 教学难点:利用它们进行简单的数学应用 授课类型:新授课 教学模式:启发、诱导发现教学. 教 具:多媒体、实物投影仪 教学过程: 一、复习引入: 情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度。 问题:如何在空间里确定点的位置?有哪些方法? 学生回顾 在空间直角坐标系中刻画点的位置的方法 极坐标的意义以及极坐标与直角坐标的互化原理 二、讲解新课: 1、球坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为θ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为?,点P 的位置可以用有序数组),,(?θr 表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系)。 有序数组),,(?θr 叫做点P 的球坐标,其中r ≥0,0≤θ≤π,0≤?<2π。 空间点P 的直角坐标),,(z y x 与球坐标),,(?θr 之间的变换关系为: ???????====++θ ? θ?θcos sin sin cos sin 2 222r z r y r x r z y x 2、柱坐标系 设P 是空间任意一点,在oxy 平面的射影为Q ,用(ρ,θ)表示点在平面oxy 上的极坐标,点P 的位置可用有序数组(ρ,θ,Z)表示把建立上述对应关系的坐标系叫做柱坐标系。 有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, z ∈R 。 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为: ?????===z z y x θ ρθρsin cos
四 柱坐标系与球坐标系简介
四、球坐標系與柱坐標系簡介 教學目的: 知識目標:瞭解在柱坐標系、球坐標系中刻畫空間中點的位置的方法 能力目標:瞭解柱座標、球座標與直角坐標之間的變換公式。 德育目標:通過觀察、探索、發現的創造性過程,培養創新意識。 教學重點:體會與空間直角坐標系中刻畫空間點的位置的方法的區別和聯繫 教學難點:利用它們進行簡單的數學應用 授課類型:新授課 教學模式:啟發、誘導發現教學. 教 具:多媒體、實物投影儀 教學過程: 一、復習引入: 情境:我們用三個數據來確定衛星的位置,即衛星到地球中心的距離、經度、緯度。 問題:如何在空間裏確定點的位置?有哪些方法? 學生回顧 在空間直角坐標系中刻畫點的位置的方法 極座標的意義以及極座標與直角坐標的互化原理 二、講解新課: 1、球坐標系 設P 是空間任意一點,在oxy 平面的射影為Q ,連接OP ,記| OP |=r ,OP 與OZ 軸正向所夾的角為θ,P 在oxy 平面的射影為Q ,Ox 軸按逆時針方向旋轉到OQ 時所轉過的最小正角為?,點P 的位置可以用有序數組),,(?θr 表示,我們把建立上述對應關係的坐標系叫球坐標系(或空間極坐標系) 有序數組),,(?θr 叫做點P 的球座標,其中r ≥0,0≤θ≤π,0≤?<2π。 空間點P 的直角坐標),,(z y x 與球座標),,(?θr 之間的變換關係為: ???????====++θ ? θ?θcos sin sin cos sin 2 222r z r y r x r z y x 2、柱坐標系 設P 是空間任意一點,在oxy 平面的射影為Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示點在 平面oxy 上的極座標,點P 的位置可用有序數組(ρ,θ,Z)表示把建立上述對應關係的坐標系叫做柱坐標系 有序數組(ρ,θ,Z)叫點P 的柱座標,其中ρ≥0, 0≤θ<2π, z ∈R 空間點P 的直角坐標(x, y, z)與柱座標(ρ,θ,Z)之間的變換關係為: ?=x θρcos
柱坐标系和球坐标系(教师)
7 柱坐标系和球坐标系 主备: 审核: 学习目标: 1.了解在柱坐标系、球坐标系中刻画空间中点的位置的方法; 2.了解柱坐标、球坐标与直角坐标之间的变换公式. 学习重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系. 学习难点:利用它们进行简单的数学应用. 学习过程: 一、课前准备 阅读教材1618P P -的内容,了解柱坐标系的定义, 以及如何用柱坐标系描述空间中的点.并思考下面的问题: 空间中的点的表示法是不是唯一的?到目前为止,你知道了几种表示空间一个点的位置的方法? 答:不是唯一的.到目前为止,我们知道了三种表示空间点的位置的方法:空间直角坐标,柱坐标系,球坐标系. 二、新课导学: (一)新知: 1.柱坐标系: (1)设P 是空间任意一点,在xOy 平面的射影为Q ,用(,)(0,02)ρθρθπ≥≤<表示点 Q 在平面xOy 上的极坐标,点P 的位置可用有 序数组(,,)z ρθ表示. 把建立上述对应关系的坐标系叫做柱坐标系.有序数组(,,)z ρθ叫点P 的柱坐标,记作(,,)z ρθ.其中0ρ≥, 02θπ≤<,z R ∈. (2)柱坐标系又称半极坐标系,它是由平面极坐标系及空间直角坐标系中的一部分建 立起来的. (3)空间点P 的直角坐标(,,)x y z 与柱坐标(,,)z ρθ之间的变换公式为 cos sin x y z z ρθρθ=?? =??=? . 2.球坐标系: (1)设P 是空间任意一点,连接OP , 记||OP r =,OP 与Oz 轴正向所夹的角为?. 设 P 在xOy 平面的射影为Q ,Ox 轴按逆时针方向
旋转到OQ 时所转过的最小正角为θ.这样点P 的位置就可以用有序数组(,,)r ?θ表示.空间的点与有序数组(,,)r ?θ之间建立了一种对应关系. 我们把建立上述对应关系的坐标系叫做球坐标系 (或空间极坐标系) . 有序数组 (,,)r ?θ叫做点P 的球坐标,其中0,0,02r φπθπ≥≤≤≤<. (2)点P 球坐标(,,)r ?θ与直角坐标(,,)x y z 的互化公式: ①2222 x y z r ++=;②sin cos sin sin cos x r y r z r ?θ?θ?=??=??=? . (二)典型例题 【例1】建立适当的球坐标系,分别表示棱长为1的正方体的顶点. 【解析】如图,建立球坐标系,则各个顶点的坐标分别为(1, ,0)2 A π ,1 ,0)4 A π ,,)24 B ππ, 1,)4 B π? ,其中tan ?=α为锐角, (1,,)22C ππ ,1,)42 C ππ,(0,0,0) D ,1(1,0,0)D . 动动手:在例1 中,建立适当的柱坐标系,写出各个顶点的柱坐标. 【解析】如上图建立柱坐标系,则各个点的坐标如下: (1,0,0)A ,1(1,0,1)A ,,0)4B π ,1,1)4 B π, (1,,0)2 C π, 1(1,,1)2 C π,(0,0,0) D ,1(0,0,1)D . 【例2】已知点1P 的柱坐标是)1,6 ,2(1π P ,2P 的柱坐标是)3,3 2, 4(2-π P ,求21P P . 【解析】点1P 的柱坐标是)1,6 , 2(1π P 转化为直角坐标为,1,16 sin 2,36 cos 2=====z y x π π ,即)1,1,3(1P , 点2P 的柱坐标是)3,3 2, 4(2-π P 转化为直角坐标为,3,323 2sin 4,232cos 4-===-==z y x π π,即)3,32,2(2--P , 所以, 126PP = =. 动动手:在球坐标系中,求)6,3, 3(π πP 与)3 2,3,3(π πQ 两点间的距离.
2018高中数学第1章坐标系13柱坐标系和球坐标系学案北师大版4-4!
1.3 柱坐标系和球坐标系 1.了解在柱坐标系、球坐标系中刻画空间中点的位置的方法.(重点) 2.理解柱坐标、球坐标与空间直角坐标的互化关系与公式.(重点) 3.体会空间直角坐标、柱坐标、球坐标刻画点的位置的方法的区别.(易错易混点) 教材整理1 柱坐标系和球坐标系 1.柱坐标系 如图1-3-1,建立空间直角坐标系O -xyz .设M (x ,y ,z )为空间一点,并设点M 在xOy 平面上的投影点P 的极坐标为(r ,θ),则这样的三个数r ,θ,z 构成的有序数组(r ,θ, z )就叫作点M 的柱坐标,这里规定r ,θ,z 的变化范围为0≤r <+∞,0≤θ<2π,-∞ <z <+∞. 图1-3-1 特别地, r =常数,表示的是以z 轴为轴的圆柱面; θ=常数,表示的是过z 轴的半平面; z =常数,表示的是与xOy 平面平行的平面. 2.球坐标系 设M (x ,y ,z )为空间一点,点M 可用这样三个有次序的数r ,φ,θ来确定,其中r 为原点O 到点M 间的距离,φ为有向线段OM → 与z 轴正方向所夹的角,θ为从z 轴正半轴看, x 轴正半轴按逆时针方向旋转到有向线段OP → 的角,这里P 为点M 在xOy 平面上的投影(如图 1-3-2).这样的三个数r ,φ,θ构成的有序数组(r ,φ,θ)叫作点M 的球坐标,这里r ,φ,θ的变化范围为0≤r <+∞,0≤φ≤π,0≤θ<2π.
图1-3-2 特别地, r =常数,表示的是以原点为球心的球面; φ=常数,表示的是以原点为顶点,z 轴为轴的圆锥面; θ=常数,表示的是过z 轴的半平面. 判断(正确的打“√”,错误的打“×”) (1)柱坐标和球坐标都是有序数组,但意义不同.( ) (2)在柱坐标系M (r ,θ,z )中,θ表示OM 与y 轴所成的角.( ) (3)球坐标中,r 表示OM 的长度.( ) 【解析】 (1)√ 柱坐标和球坐标都是有序数组,但意义不同. (2)× θ表示OM 与x 轴所成的角. (3)√ 球坐标中r 表示OM 的长度. 【答案】 (1)√ (2)× (3)√ 教材整理2 空间中点的坐标之间的变换公式 设空间一点M 的直角坐标为(x ,y ,z ),柱坐标为(r ,θ,z ),球坐标为(r ,φ,θ),则 填空: (1)柱坐标? ????2,π3,1的直角坐标是________. (2)球坐标? ????4,π4,π6的直角坐标是________. 【解析】 (1)x =2cos π3=1,y =2sin π 3 =3,z =1.