第二章机构的结构分析要点

第一章绪论
1何谓机器,何谓机构?它们有什么区别与联系?
2参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。
3举例说明什么是构件、零件?
第二章机构的结构分析
1什么是运动副、运动副元素、运动链?运动副是如何分类的?
2何谓"高副”和"低副”?在平面机构中高副和低副一般各带入几个约束?
3机构具有确定运动的条件是什么?
4既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?
5杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响?
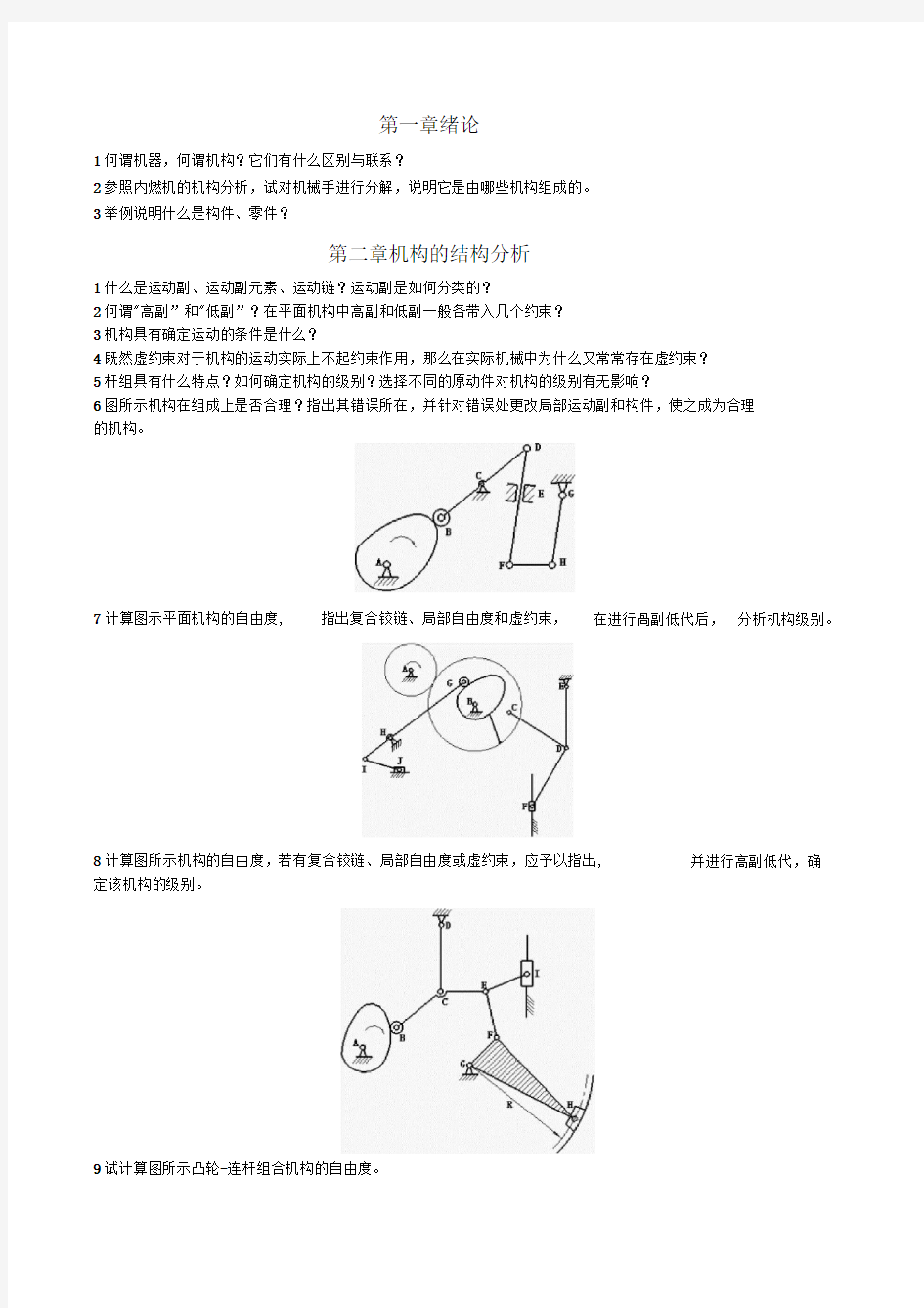
6图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理 的机构。
9试计算图所示凸轮-连杆组合机构的自由度。
7计算图示平面机构的自由度
, 指出复合铰链、局部自由度和虚约束, 在进行咼副低代后, 分析机构级别。
8计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出,
并进行高副低代,确
定该机构的级别。
11试计算图所示齿轮-连杆组合机构的自由度。
12试计算图所示齿轮-连杆组合机构的自由度。
13试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸 轮为原动件时)。
10在图所示机构中
, AB^EF -CD,试计算其自由度。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别
16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。设标有
箭头者为原动件,试判断该机构的运动是否确定,为什么?
17计算图示机构的自由度。如有复合铰链、局部自由度、虚约束,请指明所在之处。
18计算图示各机构的自由度。
19
计算图示各机构的自由度。15计算图示机构的自由度,
20计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及
机构的级别。
21计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及 机构的级别。
23
试验算图示机构的运动是否确定。如机构运动不确定请提出其具有确定运动的修改方案。
22计算机构的自由度,并分析组成此机构的基本杆组。如果在该机构中改选
机构的基本杆组是否发生变化。 FG 为原动件,试问组成此
H
24填充题及简答题:
(1)平面运动副的最大约束数为_______ ,最小约束为_______ 。
(2)平面机构中若引入一个高副将带入_______ 个约束,而引入一个低副将带入_________ 个约束。约束数与自由度数的关系是________ 。
(3)构件的自由度为_______ ,运动链的自由度为_______ ,机构的自由度为_____________ 。
(4)机构具有确定运动的条件是_____________ 。
25在图示机构中试分析计算该机构的自由度数,并判断该机构运动是否确定;若有复合铰链与局部自由度,虚约束则在图上明确指示(打箭头的为原动件)。
26在图示机构中,心止财1T-J-,试计算其自由度。
27已知机构的尺寸和位置如图所示,试求:
(1)计算机构的自由度F。是否存在复合铰链,局部自由度和虚约束?若存在,指出其位置;
(2)画出高副低代的机构运动简图。
第二章 机构的结构分析要点
第一章绪论 1 何谓机器,何谓机构?它们有什么区别与联系? 2 参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。 3 举例说明什么是构件、零件? 第二章机构的结构分析 1 什么是运动副、运动副元素、运动链?运动副是如何分类的? 2 何谓“高副”和“低副”?在平面机构中高副和低副一般各带入几个约束? 3 机构具有确定运动的条件是什么? 4 既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束? 5 杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响? 6 图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理的机构。 7 计算图示平面机构的自由度,指出复合铰链、局部自由度和虚约束,在进行高副低代后,分析机构级别。 8 计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出,并进行高副低代,确定该机构的级别。 9试计算图所示凸轮-连杆组合机构的自由度。
10 在图所示机构中,AB EF CD,试计算其自由度。 11试计算图所示齿轮-连杆组合机构的自由度。 12试计算图所示齿轮-连杆组合机构的自由度。 13 试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸轮为原动件时)。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 15计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。设标有箭头者为原动件,试判断该机构的运动是否确定,为什么? 17计算图示机构的自由度。如有复合铰链、局部自由度、虚约束,请指明所在之处。 A D E C H G F I B K 1 2 3 4 5 6 78 9 18计算图示各机构的自由度。 19计算图示各机构的自由度。
第二章机构的结构分析要点
第一章绪论 1何谓机器,何谓机构?它们有什么区别与联系? 2参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。 3举例说明什么是构件、零件? 第二章机构的结构分析 1什么是运动副、运动副元素、运动链?运动副是如何分类的? 2何谓"高副”和"低副”?在平面机构中高副和低副一般各带入几个约束? 3机构具有确定运动的条件是什么? 4既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束? 5杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响? 6图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理 的机构。 9试计算图所示凸轮-连杆组合机构的自由度。 7计算图示平面机构的自由度 , 指出复合铰链、局部自由度和虚约束, 在进行咼副低代后, 分析机构级别。 8计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出, 并进行高副低代,确 定该机构的级别。
11试计算图所示齿轮-连杆组合机构的自由度。 12试计算图所示齿轮-连杆组合机构的自由度。 13试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸 轮为原动件时)。 10在图所示机构中 , AB^EF -CD,试计算其自由度。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。设标有 箭头者为原动件,试判断该机构的运动是否确定,为什么? 17计算图示机构的自由度。如有复合铰链、局部自由度、虚约束,请指明所在之处。 18计算图示各机构的自由度。 19 计算图示各机构的自由度。15计算图示机构的自由度,
第二章 机构的结构分析分析
第二章机构的结构分析 §2-1 机构结构分析的内容及目的 1、研究机构的组成及其具有确定运动的条件 目的是弄清机构包含哪几个部分,各部分如何相联,以及怎样的结构才能保证机构中各构件具有确定的相对运动。 2、按结构特点对机构进行分类 不同的机构有各自的特点,把各种机构按结构加以分类,其目的是按其分类建立运动分析和动力分析的一般方法。 3、绘制机构运动简图 研究机构特性的工具。 4.研究机构的组成原理 研究按何种规律组成的机构能满足运动确定性的要求。 §2-2 机构的组成 一、构件与运动副 1、构件(Link) -独立的运动单元。 零件(part)-独立的制造单元,如齿轮。 如图2—1,连杆是由多个零件组成,即一个构件可是一个零件,也可是由多个构件组成的。 2、运动副 运动副-两个构件直接接触组成的能产生某些相对运动的联接。 三个条件,缺一不可,如图2—2所示。 a)两个构件、 b) 直接接触、 c) 有相对运动 运动副元素—直接接触的部分(点、线、面) 图2—2运动副例如:滚动轴承(图2—3)、齿轮齿廓(图2—4)、活塞与缸套(图
2—5)等。 图2—3滑动轴承图2—4齿轮齿廓图2—5活塞与缸套二、运动副的分类: 1.按引入的约束数分类: I级副、II级副、III级副、IV级副、V级副如图2—6所示。 图2—6按引入的约束数对运动副分类 2.按相对运动范围分类: 平面运动副-平面运动, 空间运动副-空间运动。
例如:球铰链(图2—7)、拉杆天线、螺旋(图2—8)、动物关节。 图2—7球铰链图2—8螺旋 平面机构-全部由平面运动副组成的机构,如图2—9。 空间机构-至少含有一个空间运动副的机构如图2—10。 3.按运动副元素分类: ①高副—点、线接触(应力高),例如:滚动副、凸轮副、齿轮副等,如图2—11所示。 图2—11高副 ②低副—面接触,应力低,例如:转动副(回转副)通过柱面接触、 移动副通过平面接触,如图2—12所示。 常用构件和运动副的表示符号如下: 图2—12低副图2—9平面机构图2—10空间机构
平面机构的结构分析
第二章平面机构的结构分析 1.填空题: (1)机构具有确定运动的条件是;根据机构的组成原理,任何机构都可看成是由和组成的。 (2)由M个构件组成的复合铰链应包括个转动副。 (3)零件是机器中的单元体;构件是机构中的单元体。 (4)构件的自由度是指;机构的自由度是指。 (5)在平面机构中若引入一个高副将引入个约束,而引入一个低副将引入个约束,构件数、约束数与机构自由度的关系是。 (6)一种相同的机构组成不同的机器。 A.可以 B.不可以 (7)Ⅲ级杆组应由组成。 A.三个构件和六个低副; B.四个构件和六个低副; C.二个构件和三个低副。 (8)内燃机中的连杆属于。 A.机器 B.机构 C.构件 (9)有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于。 A .0 B.1 C.2 (10)图1.10所示的四个分图中,图所示构件系统是不能运动的。 2.画出图1.11所示机构的运动简图。
3.图1.12所示为一机构的初拟设计方案。试求: (1)计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。 (2)如此初拟方案不合理,请修改并用简图表示。 4.计算图1.13所示机构的自由度,判断是否有确定运动;若不能,试绘出改进后的机构简图。修改的原动件仍为AC杆(图中有箭头的构件)。 5.计算图1.14所示机构的自由度。 6.计算图1.15所示机构的自由度。
7.计算图1.16所示机构的自由度。 8.判断图1.17所示各图是否为机构。 9.计算图1.18所示机构的自由度。 10.计算图1.19所示机构的自由度。 11.计算图1.20所示机构的自由度。已知CD=CE=FE=FD,且导路H,J共线,L和G共线,H,J的方向和L,G 的方向垂直。机构中若有局部自由度,虚约束或复合铰链,应指出。
2机构的结构分析习题
第二章机构的结构分析作业 学号姓名 一、填空题 1.组成机构的要素是和。 2.从机构结构观点来看,任何机构都是由、、 三部分组成。 3.两构件之间以线接触所组成的平面运动副称为副,它产生个约束,而 保留了个自由度。 4.平面运动副的最大约束数为,最小约束数为。 5.机构具有确定的相对运动条件是原动件数机构的自由度。 6.在右图所示平面运动链中,若构件1为机架,构件5为原动件,则成为级机构;若以构件2为机架,3为原动件,则成为级机构。 二、选择题 1.一种相同的机构组成不同的机器。 A可以B不能 2.机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。 A可以B不能 3.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一 个平面机构,则其自由度等于。 A0B1C2 4.原动件的自由度应为。 A-1B1C0 5.基本杆组的自由度应为。 A-1B1C0 6.高副低代中的虚拟构件及其运动副的自由度应为。 A-1B+1 C0D6
7.在机构中原动件数目机构自由度时,该机构具有确定的运动。 A小于B等于C大于 8.计算机构自由度时,若计入虚约束,则机构自由度就会。 A增多B减少C不变 9.构件运动确定的条件是。 A自由度大于1B自由度大于零C自由度等于原动件数 10.渐开线齿轮机构的高副低代机构是一铰链四杆机构,在齿轮传动过程中,该四杆机构的。 A两连架杆的长度是变化的B连杆长度是变化的 C所有杆件的长度均变化D所有杆件的长度均不变 三、计算分析题 1.请你画出一把直柄雨伞的机构运动简图。 2.请画出下列机构的运动简图,并计算其自由度。
机构的结构分析
第二章机构的结构分析 教学目的:(1)明确构件、运动副、约束、自由度、运动链及机构等重要概念; (2)能绘制简单机械的机构运动简图; (3)掌握平面机构的自由度计算,并判断其具有确定运动的条件; (4)了解平面机构的组成原理。 课时安排:4h 重点难点:重点—平面机构自由度计算;难点—绘制机构运动简图、自由度计算时注意事项的处理。 §2-1 机构结构分析的内容及目的 1.研究机构的组成及其具有确定运动的条件 目的是弄清机构包含哪几个部分,各部分如何相联,以及怎样的结构才能保证机构中各构件具有确定的相对运动。 2.按结构特点对机构进行分类 不同的机构有各自的特点,把各种机构按结构加以分类,其目的是按其分类建立运动分析和动力分析的一般方法。 3.绘制机构运动简图 研究机构特性的工具。 4.研究机构的组成原理 研究按何种规律组成的机构能满足运动确定性的要求。 §2-2 机构的组成 一、构件 从制造加工角度:机械由零件组成。零件——制造单元体 从运动功能角度:机械由机构组成,而机构由构件组成。构件——独立运动的单元体 注意:构件可以是单一零件,也可以是几个零件的刚性联接。 二、运动副 1.定义:指两构件直接接触并能产生相对运动的联接。 2.运动副元素:指两个构件直接接触而构成运动副的部分。 3.构件的自由度:指一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度,作平面运动时有3个自由度。 4.约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。运动副引入的约束数等于两构件相对自由度减少的数目。运动副引入的约束数最多为5个。 5.运动副分类 1)按运动副相对运动形式分 转动副、移动副、螺旋副、球面副等 2)按运动副引入的约束数分 Ⅰ级副、Ⅱ级副、Ⅲ级副、Ⅳ级副、Ⅴ级副 3)按运动副接触形式分 低副:两构件通过面接触而构成的运动副统称为低副;