智能导航系统的发展与应用

第17卷第6期中国水运Vol.17No.62017年6月China Water Transport June 2017
收稿日期:2017-05-07
作者简介:李能斌,上海中船航运有限公司船长,总经理。
智能导航系统的发展与应用
李能斌
(上海中船航运有限公司,上海200000)
摘
要:本文首先然后分析了智能导航系统和运行原理,并针对其适用范围,指出在应用方面的局限性,以期对智
能导航系统的开发研究有所帮助。
关键词:智能导航;系统;智能决策;船舶避碰中图分类号:TP301文献标识码:A 文章编号:1006-7973(2017)06-0044-03
一、引言
随着信息科学、计算机技术、人工智能及其现代控制等技术的飞速发展,人们尝试用它们来解决船舶航行的安全问题。航行安全问题一直是航海界面临的急需解决的重大课题,据海外资料统计,每年头事船舶约为200艘,总吨数为120万t,占世界船队的0.4%左右,这相当于每15d 损失一艘5万t 级的船舶。然而,在碰撞船舶的原因调查中,有80%以上是由于人为因素造成的。解决人为因素问题可以通过二个途径:一是加强船员技术培训和管理,提高船员素质和责任感;二是提高船舶自动化程度,逐步实现航海自动化,随着经济的发展,船员不长期从事这个职业已成事实。因此从技术上提高自动化程度,在决策和操作上减少人的参与,逐步实现船舶避碰自动化,这才是解决人为因素的根本方法。自80年代以来,国内外航海界在智能导航技术方面取得了重大发展,而实现智能导航的核心就是实现自动避碰,为此,许多专家、学者从各个领域,不同角度致力于解决船舶的智能避碰问题。
二、智能导航系统结构框图及各部分的作用
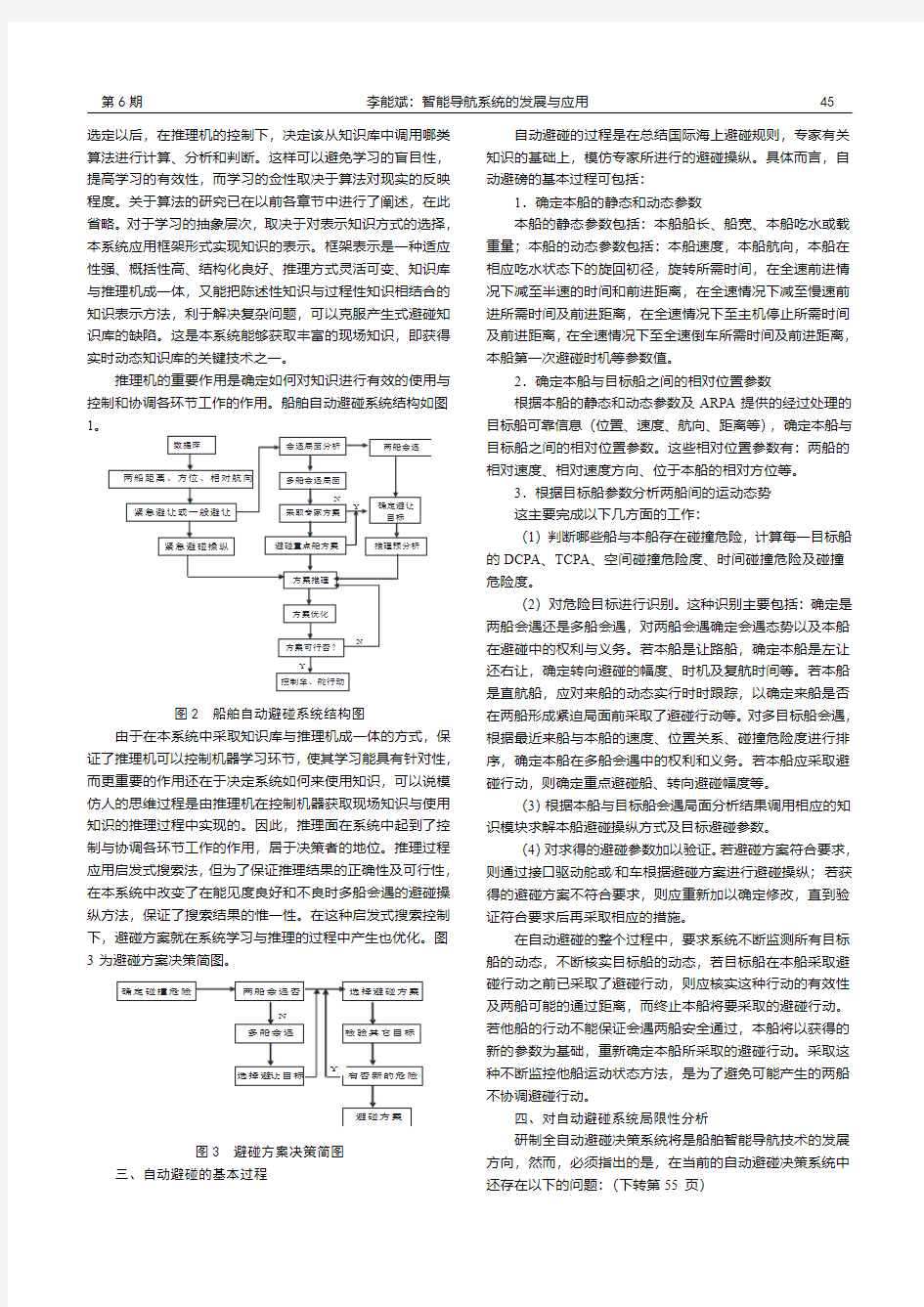
船舶自动避碰系统结构如图1所示。本系统由数据库、
图1船舶自动避碰系统结构图
带有虚线部分为本船的传感器,其功能是收集本船及他船的运动信息,并将所收集的信息输入数据库。根据GPS 找出我船的船位,从计程仪和罗径上知道,我船船速和航向,从雷达上可获知周围船舶动态和环境情况,通过ARPA 可知他船和我船的DCPA 和TCPA。
电子海图提供了当地水深和地质数据,航海危险物数据,助航标志数据等海图信息。
数据库主要存放来自传感器和电子海图的信息以及推理过程中的中间结果等数据,供机器学习及进行深入推理时随时调用。
知识库主要包括了根据国际海上避碰规则、船员经验和专家对国际海上避碰规则的理解和认识的模块及根据船员避碰行为和专家经验所推导的研究成果,包括了良好船艺的基础知识和规则;包括了实现避碰了推理所需的算法及其结果和由各种产生式规则形成的若干个基本避碰知识模块等构成。避碰知识库是船舶自动避碰块决策的核心部分。根据船员避碰实践、国际海上避碰规则、航海专家和专业人员对规则的解释及良好船艺的实地应用,通过知识工程的处理将其转化成可用的形式。所谓知识工程是这样的技术:它从专家和文献中选取有关特定领域的信息,并将其模型制成所选定的知识形式。描述知识可以有很多种不同形式,在本系统中所采用的专家系统中通常所采取的形式,即为“如果……那么……”产生规则。其主要优点在于它的积木性。对于避碰局面的划分,根据能见度好坏分为能见度好时两船会遇、能见度不好时两船会遇、能见度良好时多船会遇和能见度不良时多船会遇基本形式。在每一种划分中,根据不同的会遇情
况又有不同的避碰操纵划分。对每一划分的每一避碰操纵划分,根据专家意见及船员实际避碰操纵,规定了具体的操纵避碰方式。其根本目的是为推理机的推理提供充分的和必需的知识。
机器学习就是计算机自动获取知识。对于避碰这样一个动态、时变的过程,就要求系统具有实时掌握目标动态的能力,这样依据知识而编制的避碰方案才会具有人的应变能力。所建造的专家系统性能的好坏,关键取决于机器学习的质量,学习质量是通过学习的佥性(真实性)、有效性和抽象层次这三个标准来衡量的。本系统采取以下方式,提高专家系统的性能。系统设计中采用算法作为学习的表示形式,采用归纳学习作为学习策略,即学习中采用推理的方法。机器学习就是在推理机推理决定应选取哪个模块来确定避碰方法。方法
校园导航系统---算法与分析课程设计
算法设计与分析课程设计 题目:校园导航问题 文档: 物联网工程学院物联网工程专业 学号 学生姓名 班级物联网1101 二〇一三年十二月
设计要求:设计你的学校的平面图,至少包括10个以上的场所,每两个场所间可以有不同的路,且路长也可能不同,找出从任意场所到达另一场所的最佳路(最短路径)。 本系统为用户提供以下功能: (一)、查询了解学校概况,为导游参观者提供关于学校的相关信息。 (二)、查询校园各个场所和景点信息; (三)、为导游者或外来人员参观人员提供校园交通信息,方便用户走访学校。完成需要操作时,退出系统 校园导航查询系统的开发方法总结如下: (1) 需求分析,了解学校各个场所与场所或者是各个景点与景点之间的信息,路径和距离,考虑该如何设计才能满足用户需求。 (2) 概要设计,对调查得到的数据进行分析,根据其要求实现的功能分析系统结构和界面将实现的基本功能。 (3) 详细设计,设计系统界面并编辑实现其各个功能的代码。 (4) 调试分析,在设计完成后,调试系统运行的状况,修改完善系统,然后进行测试。 一、需求分析 1学校以及各景点介绍模块 采用一维数组将学校景点依次排放好编号G.vex[i].number=i 在选择校园介绍的时候,弹出G.vex[0]校园简介。在选择各景点信息的时候,可按编号查询2查询最短路径(主要) 查出出发地到想要到达的景点的最短路径,初步构想采用最经典的迪杰斯特拉算法最短路径函数 3查询各点距离 将所有景点的距离显示出来。 4主菜单页面显示 提供使用者选择功能界面,按照提示进行操作。 5退出 完成需要操作时,退出系统
校园导航系统模式图 二、概要设计 2.1算法设计说明 校园导航模型是由各个景点和景点以及场所和场所之间的路径组成的,所 以这完全可以用数据结构中的图来模拟。用图的结点代表景点或场所,用图的边 代表景点或场所之间的路径。所以首先应创建图的存储结构。结点值代表景点信 息,边的权值代表景点间的距离。结点值及边的权值采用图存储。本系统需要查 询景点信息和求一个景点到另一个景点的最短路径长度及路线,为方便操作,所 以给每个景点一个代码,用结构体类型实现。计算路径长度,最短路线和最佳路 径时可分别用迪杰斯特拉(Dijkastra )算法和哈密而顿回路算法实现。最后switch 选择语句选择执行浏览景点信息或查询最短路径和距离。 2.1.1学校以及各景点介绍模块 采用了图的邻接矩阵存储结构,首先初始化每一个景点名称(一维数组) fo r(i=1;i 计算机科学与技术概论结业作业 人工智能技术简介及发展趋势 院系:信息科学与技术学院计算机科学与技术系 姓名:尹颜朋 学号:2011508009 前言 人工智能(Artificial Intelligence), 英文缩写为 AI, 是一门综合了计算机科学、生理学、哲学的交叉学科。人工智能的研究课题涵盖面很广,从机器视觉到专家系统,包括了许多不同的领域。这其中共同的基本特点是让机器学会“思考” 。为了区分机器是否会“思考”(thinking),有必要给出“智能”(intelligence)的定义。究竟“会思考”到什么程度才叫智能?比方说,解决复杂的问题,还是能够进行概括和发现关联? 还有什么是“知觉”(perception),什么是“理解”(comprehension)等等?对学习过程、语言和感官知觉的研究为科学家构建智能机器提供了帮助。现在,人工智能专家们面临的最大挑战之一是如何构造一个系统,可以模仿由上百亿个神经元组成的人脑的行为, 去思考宇宙中最复杂的问题。或许衡量机器智能程度的最好的标准是英国计算机科学家阿伦·图灵的试验。他认为,如果一台计算机能骗过人,使人相信它是人而不是机器,那么它就应当被称作有智能。 人工智能从诞生发展到今天经历了一条漫长的路,许多科研人员为此而不懈努力。人工智能的开始可以追溯到电子学出现以前。象布尔和其他一些哲学家和数学家建立的理论原则后来成为人工智能逻辑学的基础。而人工智能真正引起研究者的兴趣则是1943年计算机发明以后的事。技术的发展最终使得人们可以仿真人类的智能行为,至少看起来不太遥远。接下来的四十年里,尽管碰到许多阻碍,人工智能仍然从最初只有十几个研究者成长到现在数以千计的工程师和专家在研究;从一开始只有一些下棋的小程序到现在的用于疾病诊断的专家系统,人工智能的发展有目共睹。 人工智能始终处于计算机发展的最前沿。高级计算机语言、计算机界面及文字处理器的存在或多或少都得归功于人工智能的研究。人工智能研究带来的理论和洞察力指引了计算技术发展的未来方向。现有的人工智能产品相对于即将到来的人工智能应用可以说微不足道,但是它们预示着人工智能的未来。对人工智能更高层次的需求已经并会继续影响我们的工作、学习和生活。 第一章人工智能的产生 人工智能, 英文单词 artilect,来源于雨果·德·加里斯的著作 智能控制研究新进展 人工神经网络,一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。人工神经网络具有自学习和自适应的能力,可以通过预先提供的一批相互对应的输入-输出数据,分析掌握两者之间潜在的规律,最终根据这些规律,用新的输入数据来推算输出结果,这种学习分析的过程被称为“训练”。 1. 智能控制的特点 ①、不确定性的模型 智能控制的研究对象通常存在严重的不确定性。这里所说的模型不确定性包含两层意思:一是模型未知或知之甚少;二是模型的结构和参数可能在很大范围内变化。 ②、高度的非线性 对于具有高度非线性的控制对象,采用智能控制的方法往往可以较好地解决非线性系统的控制问题。 ③、复杂的任务要求 对于智能控制系统,任务的要求往往比较复杂。 2.智能控制与传统控制的关系 智能控制与传统的或常规的控制有密切的关系,不是相互排斥的。常规控制往往包含在智能控制之中,智能控制也利用常规控制的方法来解决“低级”的控制问题,力图扩充常规控制方法并建立一系列新的理论与方法来解决更具有挑战性的复杂控制问题。 传统的自动控制是建立在确定的模型基础上的,而智能控制的研究对象则存在模型严重的不确定性,即模型未知或知之甚少者模型的结构和参数在很大的范围内变动,比如工业过程的病态结构问题、某些干扰的无法预测,致使无法建立其模型,这些问题对基于模型的传统自动控制来说很难解决。 传统的自动控制系统对控制任务的要求要么使输出量为定值(调节系统),要么使输出量跟随期望的运动轨迹(跟随系统),而智能控制为解决这类复杂的非线性问题找到了一个出路,成为解决这类问题行之有效的途径。工业过程智能控制系统除具有上述几个特点外,又有另外一些特点,如被控对象往往是动态的,而且控制系统在线运动,一般要求有较高的实时响应速度等,恰恰是这些特点又决定了它与其它智能控制系统如智能机器人系统、航空航天控制系统、交通运输控制系统等的区别,决定了它的控制方法以及形式的独特之处。 数据结构课程设计-校 园导航 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN 课程设计报告 课程名称数据结构课程设计题目校园导航 指导教师 设计起始日期 5.9~5.16 学院计算机学院 系别计算机科学与工程 学生姓名 班级/学号 成绩 一、需求分析 本次实验设计的任务是实现一个简易的北京信息科技大学的校园导航平面图。设计要包括下列要求: 设计你的学校的平面图,至少包括10个以上的场所,每两个场所间可以有不同的路,且路长也可能不同,找出从任意场所到达另一场所的最佳路径(最短路径)。 本课题实现校园多个场所(至少10个)的最短路径求解。 (1)输入的形式和输入值的范围:本系统主要数据类型为字符型char及整形int,char型主要包括单位编号,单位名称,单位简介,功能编号;输入功能编号与单位编号进行操作。 (2 ) 输出的形式:输出则通过已有的信息数据,通过相关的操作输出相应信息。 (3) 程序所能达到的功能:本程序可供任何人使用,主要功能1.浏览各单位及简介;2.查看所有游览路线;3.选择出发点和目的地求出最佳路径;4.查看某一单位信息。 (4)测试数据:包括正确的输入及其输出结果和含有错误的输入及其输出结果。 a.首先看到的是校园导航系统的菜单: b.查看浏览路线等待输入起始景点: C.选择出发点与目的地等待输入起始景点与目的地编号: d.参看景点信息等待输入景点编号: 二、概要设计 本系统包含一个文件。设计分有菜单,显示信息,弗洛伊德算法,迪杰斯特拉算法,查找景点信息等程序段。主程序为整系统的入口处,菜单主要实现显示系统功能,显示信息主要实现显示景点信息,弗洛伊德算法主要实现求两景点之间最短路径,迪杰斯特拉算法实现求两景点之间最短路径,查找景点信息主要实现显示某一景点信息。 系统首先通过主程序调用void main( );进入系统主菜单函数,根据用户的选择可分别进入:1.浏览各景点及简介;2.查看所有游览路线;3.选择出发点和目的地求出最佳路径;4.查看景点信息;5.退出系统。 选择“浏览各景点及简介”项,显示十个景点的有关信息,包括景点编号,景点名称,景点简介。 选择“查看所有游览路线”项,会进入输入起始景点编号的界面,输入正确编号后会显示起始景点到其余九个景点的最短路线的方案。 选择“选择出发点和目的地”项,会进入输入起始景点与目的景点的界面,输入起始景 点与目的景点,并有空格隔开就得到两景点之间的最佳路径。 选择“查看景点信息”项,会进入输入要查看的景点的界面,如入后会显示该景点的有关信息。 选择“退出系统”项,就会退出程序。 三、详细设计 (1)十三个单位的图 人工智能未来发展前景展望 :磊(10计本) 学号: 长久以来,人工智能对于普通人来说是那样的可望而不可及,然而它却吸引了无数研究人员为之奉献才智,从美国的麻省理工学院(M IT)、卡基-梅隆大学(CMU)到IBM公司,再到日本的本田公司、SONY公司以及国的清华大学、中科院等科研院所,全世界的实验室都在进行着AI技术的实验。不久前,著名导演斯蒂文·斯皮尔伯格还将这一主题搬上了银幕,科幻片《人工智能》(AI)对许多人的头脑又一次产生了震动,引起了一些人士了解并探索人工智能领域的兴趣。 (一)、人工智能的定义 人工智能的定义可以分为两部分,即“人工”和“智能”。“人工”比较好理解,争议性也不大。有时我们会要考虑什么是人力所能及制造的,或者人自身的智能程度有没有高到可以创造人工智能的地步,等等。但总的来说,“人工系统”就是通常意义下的人工系统。 “智能”1是一个宽泛的概念。智能是人类具有的特征之一。Intelegere是从中进行选择,进而理解、领悟和认识。正如帕梅拉·麦考达克在《机器思维》(machines who thinks,1979)中所提出的: 在1"智能"源于拉丁语legere,字面意思是采集(特别是果实)、收集、汇集,并由此进行选择,形成一个东西。 复杂的机械装置与智能之间存在长期的联系。从几个世纪前出现的神话般的巨钟和机械自动机开始,人们已对机器操作的复杂性与自身的某些智能活动进行直观联系。经过几个世纪之后,新技术已使我们所建立的机器的复杂性大为提高。1936年,24岁的英国数学家图灵 i(Turing)提出了"自动机"理论,把研究会思维的机器和计算机的工作大大向前推进了一步,他也因此被称为"人工智能之父"。 人工智能领域的研究是从1956年正式开始的,这一年在达特茅斯大学召开的会议上正式使用了"人工智能"(artificial intelligence,AI)这个术语。随后的几十年中,人们从问题求解、逻辑推理与定理证明、自然语言理解、博弈、自动程序设计、专家系统、学习以及机器人学等多个角度展开了研究,已经建立了一些具有不同程度人工智能的计算机系统,例如能够求解微分方程、设计分析集成电路、合成人类自然语言,而进行情报检索,提供语音识别、手写体识别的多模式接口,应用于疾病诊断的专家系统以及控制太空飞行器和水下机器人更加贴近我们的生活。我们熟知的IBM的"深蓝"在棋盘上击败了国际象棋大师卡斯帕罗夫就是比较突出的例子。 当然,人工智能的发展也并不是一帆风顺的,也曾因计算机计算能力的限制无法模仿人脑的思考以及与实际需求的差距过远而走入低谷,但是随着硬件和软件的发展,计算机的运算能力在以指数级增长,同时网络技术蓬勃兴起,确保计算机已经具备了足够的条件来运 智能移动机器人的现状和发展 姓名 学号 班级: 智能移动机器人的现状及其发展 摘要:本文扼要地介绍了智能移动机器人技术的发展现状,以及世界各国智能移动机器人的发展水平,然后介绍了智能移动机器人的分类,从几个典型的方面介绍了智能移动机器人在各行各业的广泛应用,讨论了智能移动机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能移动机器人方面发展并提出期望。 关键词:智能移动机器人;发展现状;应用;趋势 1引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能移动机器人则是一个在感知 - 思维 - 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能移动机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能 力。智能移动机器人与工业机器人的根本区别在于,智能移动机器人具有感知功 能与识别、判断及规划功能[1] 。 随着智能移动机器人的应用领域的扩大,人们期望智能移动机器人在更多领 域为人类服务,代替人类完成更复杂的工作。然而,智能移动机器人所处的环境 往往是未知的、很难预测。智能移动机器人所要完成的工作任务也越来越复杂; 对智能移动机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对 智能移动机器人的研究不断深入。 本文对智能移动机器人的现状和发展趋势进行了综述,分析了国内外的智能 移动机器人的发展,讨论了智能移动机器人在发展中存在的问题,最后提出了对 智能移动机器人发展的一些设想。 1 物联网的智慧校园管理 系统 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】 物联网的教室管理系统在学校,课堂教学环节是学生接受系统教育最重要的一环,做好教学互动环节,是掌握好教学环节的质量,提高教学水平的关键。现行的教学过程中,传统的签到环节、教室使用率均存在诸多问题。签到过程中,使用纸张签到,效率低且存在代签现象,结果不便于教师统计;随着高校的扩招,在校学生越来越多,而相应高校面积却没有扩建。随着高校后勤社会化改革,学生上课条件得到了很大改善,可供学生选择的余地也越来越大,但是如今学生和自习座位现行的教学楼管理系统中存在着许多问题,目前国内大部分的教学楼管理内部还处于原始的人工管理阶段,无论对自习的学生还是对教学楼的管理者都造成了极大地困扰。尤其是在高峰期形成拥挤的现象,极大的耽误了时间。传统的教学方式已经不适应现代化教学的需要,基于物联网技术集智慧教学、人员考勤、视频监控及远程控制于一体的新型现代化智慧教室系统在逐步的推广运用。智慧教室作为一种新型的教育形式和现代化教学手段,给教育行业带来了新的机遇。 目标: 1、教室课程安排。 学生可以通过手机、pad、电脑等设备对各教室使用情况进行查询,引导学生以最短的时间快速进入自己中意的教室,提高教学楼的使用率、提高学生满意度。 绿色:无课,座位使用率在50%以下。 蓝色:有课 黄色:无课,座位使用率在50%以上,70%以下 橙色:无课,座位使用率在70% 以上 学生可以通过手机、PAD、电脑等设备对每个教室本周的课程情况进行查询。 课程安排信息与教务处课程安排同步。需要教务处提供软件借口。 每个教室需要安装传感器进行监测教室中的人数。 如下图,是教室米高处的截面图。虚线位置为传感器安放位置,其中传感器安装在门框上,传感器安装在与传感器成30°角的位置。 (1)如果一个人先经过号传感器,然后接着接着经过了号传感器,则记录为教室进入一人; (2)如果一个人先经过号传感器,然后但是没有经过了号传感器,而是又经过了号传感器,则记录为教室未进入一人; (3)如果一个人先经过号传感器,然后接着经过了号传感器,则记录为教室出去一人; 课程设计 课程名称软件工程 题目名称校园导航系统专业班级2012级网络工程应用学生姓名柴安康 学号 51202031022 指导教师储德锋 二○一五年六月一日 任务书 上机时间安排星期 周次 一二三四五 第14 周-第 17周 12网络工程 应用,1-2节 12网络工程应 用,3-4节 指导时间地点上机时间,计算机基础实验室(B521) 课程软件工程班级2012网络工程 应用 指导教师储德锋 题目校园导航系统完成时间2015年5月20日至2015年6月11日 主要内容要求完成以下功能: 1. 了解模型机的指令系统。 2. 设计模型机指令,掌握指令的执行过程。 3. 了解简单计算机内部各部件的连接,微程序控制器的设计。 4. 熟练掌握程序汇编机器码指令的含义及编写。 5. 能熟练区分直接寻址、间接寻址、寄存器寻址等各种寻址方式的不同。 设计报告要求1.封面:(格式附后) 2.课程设计任务书 3.课程设计报告: (1)需求分析 (2)功能设计 (3)程序代码设计 (4)程序设计总结 (5)心得体会和参考文献 说明:学生完成课程设计后,提交课程设计报告及软件,要求文字通畅、字迹工整(也可用以打印),文字不少于5000 字,并装订成册。 版面要求1.题目用黑体三号,段后距18磅(或1行),居中对齐;2.标题用黑体四号,段前、段后距6磅(或0.3行);3.正文用小四号宋体,行距为1.25倍行距; 4.标题按“一”、“㈠”、“1”、“⑴”顺序编号。 分工协作说明 课题名称学生姓名学号所做的工作 校园导航系统金海侠51202032014 总体分工 指令结构总体设计夏昭明51202031005 需求分析 实地考察 陈金锁51202031010 指令具体实现夏宇峰51202031015 部分程序代码设计柴安康51202031018 调试运行 杨辉51202031022 心得体会 格式调整 代码指令的共同调试 人工智能的发展前景 人工智能很可能导致人类的永生或者灭绝,而这一切很可能在我们的有生之年 发生。 上面这句话不是危言耸听,请耐心的看完本文再发表意见。这篇翻译稿翻译完 一共三万五千字,我从上星期开始翻,熬了好几个夜才翻完,因为我觉得这篇 东西非常有价值。希望你们能够耐心读完,读完后也许你的世界观都会被改变。 我们正站在变革的边缘,而这次变革将和人类的出现一般意义重大–Vernor Vinge 如果你站在这里,你会是什么感觉? 看上去非常刺激吧?但是你要记住,当你真的站在时间的图表中的时候,你是 看不到曲线的右边的,因为你是看不到未来的。所以你真实的感觉大概是这样的: 稀松平常。 遥远的未来——就在眼前 想象一下坐时间机器回到1750年的地球,那个时代没有电,畅通通讯基本靠吼,交通主要靠动物拉着跑。你在那个时代邀请了一个叫老王的人到2015年来玩,顺便看看他对―未来‖有什么感受。我们可能没有办法了解1750年的老王内心的感受——金属铁壳在宽敞的公路上飞驰,和太平洋另一头的人聊天,看几千公里外正在发生进行的体育比赛,观看一场发生于半个世纪前的演唱会,从口袋里掏出一个黑色长方形工具把眼前发生的事情记录下来,生成一个地图然后地图上有个蓝点告诉你现在的位置,一边看着地球另一边的人的脸一边聊天,以及其它各种各样的黑科技。别忘了,你还没跟他解释互联网、国际空间站、大型强子对撞机、核武器以及相对论。 这时候的老王会是什么体验?惊讶、震惊、脑洞大开这些词都太温顺了,我觉得老王很可能直接被吓尿了。 但是,如果老王回到了1750年,然后觉得被吓尿是个很囧的体验,于是他也想把别人吓尿来满足一下自己,那会发生什么?于是老王也回到了250年前的 数据结构-校园导航系统 简介:本系统采用C语言编写,运行环境为Dev-C++; 容以电子科技大学南校区为例; 主要功能有:1.查询景点信息;2.查询两景点间最短距离;3.查询两景点间所有路线;4.查询西电校园地图;5.修改景点和路径信息. 注意事项:在进行修改景点和路径信息操作前,请在可执行文件目录下用记事本创建”superUser.CODE”文件来存放用户名与密码(中间以空格隔开),否则无法进入. 源代码: #include char particular1[1000]; char particular2[1000]; char particular3[1000]; //景点详情 }VertexType; typedef struct { VertexType vex[20]; //最多存放20个景点信息ArcCell arcs[20][20]; //两个景点间的距离 int vexnum,arcnum; }MGraph; MGraph G; char nameofschool[100]; //学校名称 int NUM=9; int P[20][20]; int p[20]; int visited[20]; int a=0; long int D[20]; int x[20]={0}; //函数声明 void CreateUDN(int v,int a); void narrate(); void ShortestPath(int num); void output(int sight1,int sight2); char Menu(); void search(); char SearchMenu(); void HaMiTonian(int); void Searchpath1(MGraph g); void disppath(MGraph g,int i,int j); void path(MGraph g,int i,int j,int k); void NextValue(int); void display(); int Addnewsight(int n); int Deletesight(int n); void Changesight(); char Changemenu(); char Sightmenu(); int Maintain(void); int VerificatianIdentity(void); void map(); 人工智能技术及其发展趋势 1.()是通过建立人工神经网络,用层次化机制来表示客观世界,并解释所获取的知识,例如图像、声音和文本。(3.0分) A.深度学习 B.机器学习 C.人机交互 D.智能芯片 我的答案:A√答对 2.(),中共中央政治局就人工智能发展现状和趋势举行第九次集体学习。( 3.0分) A.2018年3月15日 B.2018年10月31日 C.2018年12月31日 D.2019年1月31日 我的答案:B√答对 3.下列选项中,不属于生物特征识别技术的是()。(3.0分) A.步态识别 B.声纹识别 C.文本识别 D.虹膜识别 我的答案:C√答对 4.立体视觉是()领域的一个重要课题,它的目的在于重构场景的三维几何信息。(3.0分) A.人机交互 B.虚拟现实 C.自然语言处理 D.计算机视觉 我的答案:D√答对 5.生物特征识别技术不包括()。(3.0分) A.体感交互 B.指纹识别 C.人脸识别 D.虹膜识别 我的答案:A√答对 6.关于专用人工智能与通用人工智能,下列表述不当的是()。(3.0分) A.人工智能的近期进展主要集中在专用智能领域 B.专用人工智能形成了人工智能领域的单点突破,在局部智能水平的单项测试中可以超越人类智能 C.通用人工智能可处理视觉、听觉、判断、推理、学习、思考、规划、设计等各类问题 D.真正意义上完备的人工智能系统应该是一个专用的智能系统 我的答案:D√答对 7.()是指直接通过肢体动作与周边数字设备和环境进行交互。(3.0分) A.体感交互 B.指纹识别 C.人脸识别 D.虹膜识别 我的答案:A√答对 8.下列对人工智能芯片的表述,不正确的是()。(3.0分) A.一种专门用于处理人工智能应用中大量计算任务的芯片 B.能够更好地适应人工智能中大量矩阵运算 C.目前处于成熟高速发展阶段 D.相对于传统的CPU处理器,智能芯片具有很好的并行计算性能 我的答案:C√答对 9.()是人工智能的核心,是使计算机具有智能的主要方法,其应用遍及人工智能的各个领域。(3.0分) A.深度学习 B.机器学习 C.人机交互 D.智能芯片 智能设备的特点及发展趋势 电脑,智能手机,照相机,洗衣机等传统智能设备的出现颠覆了世界,从此,人类的生活发生了巨大的改变,而这种改变也一直使人们对新时代智能设备的发展抱有无限憧憬。如今,随着物联网的发展,新式智能设备不断传出。 举例1:iwatch苹果智能手表,以最简单的形式在传统手环上嵌入柔性显示屏以及必要的电子元件。双稳定弹簧由薄钢条制成,然后用纤维物包裹并加热封闭。显示器将用胶粘剂粘在手环一侧,而设备的主板、电池和其他部件安装在另一侧。通过这种方式安装部件,在佩戴时手环将盖住重要的电子模块。当其处于“卷曲状态”时,手环仍可呈现出不间断屏幕的形式。上面的传感器,如陀螺仪和加速计,将帮助其定位屏幕上的信息,方便用户浏览,可与智能手机连网。这款设备可以通过蓝牙或WiFi与包括iPhone和其他智能手机在内的便携式设备连网,实现信息共享。用户还可以通过这款设备完成很多工作,包括调整播放清单、查看最近通话记录和回复短信息等。 举例2:智能手环,是新兴起的一个科技领域,它可以跟踪用户的日常活动、睡眠情况和饮食习惯等,并可将数据与iOS、Android 设备同步,帮助用户了解和改善自己的健康状况。 举例3:BrainLink 智能头箍,BrainLink是一个安全可靠,佩戴简易方便的头戴式脑电波传感器。它可以通过蓝牙无线链接手机、平板电脑、手提电脑、台式电脑或智能电视等终端设备。配合相应的应用软件就可以实现意念力互动操控。Brainlink引用了国外先进的脑机 接口技术,其独特的外观设计、强大的培训软件深受广大用户的喜爱。它能让手机或平板电脑即使了解到您的大脑状态,例如是否专注、紧张、放松或疲劳等。您也可以通过主动调节自己的专注度和放松度来给予手机平板电脑指令,从而实现神奇的“意念力操控”。 举例4:智能抽油机,智能抽油机与磕斗机相比,实现了信息自动采集和远程控制功能,解决了长期存在的“干抽”和“卡泵”等难题,并利用无线数据传输系统,可将产量、液面、深度、运行参数、故障警报等数据信息,发送到用户手机或计算机终端上,同时用户也可用手机或计算机远程控制设备的运行,大大提高了工作效率和机械化程度。 举例5:穿戴式胎语依,传统的设备仅仅只是听一个胎心,胎音。胎语仪除了听胎音和胎心之外,还可以实时的把这个曲线绘制出来,医生可以通过这个胎心曲线知道胎儿是不是缺氧,在体内是否健康,更多的除了医学意义之外,因为它是跟无线互联网联合在一起,因此可以把娱乐性趣味性加进来,比如制作胎音音乐,摇篮曲等,因此大数据在智能穿戴设备中显得尤为重要。 举例6:谷歌眼镜,人们可利用语音指令拍摄照片、摄制视频、与他人在网上互动。不会在手机屏幕上提供搜索或导航结果,而是会将地图叠加到用户的视野中。 举例7:指套探测器,这种指套探测器的表面装有一些微小、极薄的传感器,能够检测被感知物的性质(如酸度),而内置于其超薄有机硅材料中的金属电路则负责处理数据。当它发现所寻找的东西 xxxxxx项目 智能化系统配置表序号智能化系统 1通信接入系统 2语音通讯 3综合布线系统 4信息网络系 统 系统形式 由当地通信运营商提供电话通信设备 及光纤接入,通过语音光纤引至楼层 弱电间通信设备,供用户申请接入。 设置程控电话交换机 采用光缆+六类非屏蔽电缆的配置: 主干万兆多/单模光缆,水平六类非 屏蔽双绞线。 采用“核心+汇聚+接入”三层星型网 络结构配置,万兆骨干、千兆桌面。 无线网络:采用AC控制器+瘦AP配置, 802.11ac标准 网络安全:采用统一威胁管理(UTM)设 备。 系统功能 实现基本的通话功能,物业自用办公室部 分通过程控交换机还可实现各种办公定制 的应用功能。 实现内部电话和外线电话的需要 提供给数据、语音、无线AP、视频监控、 IP校园广播、闭路电视以及公共信息发布 系统使用。包括室内外管线槽敷设、 42U标 准机柜及数据信息终端接口等,预留20%余 量。 设置校园网、智能网两个物理上独立 的网络,对校园进行无线网络信号覆 盖。 对校园网接入采用UTM进行安全保护 5有线电视系统 6 校园广播系 统 公共信息发布系 7 统 校园一卡通管理8 系统 智慧校园应用系9 统 智慧校园信息化10 应用平台 报告厅音视频系11 统 体育场馆扩声系12 统 数字电视+终端数字机顶盒+放大、分 提供当地数字有线电视接入的条 件, 将电视 配分支 信号接入指定位置,不设卫星接收设 备。 既有全院范围内统一集中的控制管理, 又可 授权多个分控点广播,对各区域内(教室) 基于智能网设置一套IP 网络音频广播 独立的控制管理,在遭遇紧急情况时,可强 系统,创建校园广播站,配置多个分控 切为应急广播或寻呼广播;可设多种不同节 点(院系广播、听力测试)。 目源,可自定选择节目。教室可以按年级或 班级同时播放指定节目,如英语听力训练和 考试。 基于智能网的IP 网络结构,设置节目 系统涵盖信息发布和信息查询等功能; 预留 制作、播放控制服务器。 室外大屏的信息发布点。 建设基于智能网的校园一卡通系统平 在院区建设多个“卡务中心”面向用户服 务, 携带一张卡就能实现多种用途,实现电子货 台,实现门禁、消费(电子支付)、图 币、认证、管理、服务、运维、开放五方面 书资料借阅、学籍管理 的建设需求。 为管理者提供了集成的一体化联动指挥 界 建立“绿色智慧校园综合管理平台”并 面。实现办公管理与服务一体化、 学生管理 与校园智能化系统集成。 与服务一体化、教学管理与服务一体 化、 知 识管理与服务一体化管理 建设云基础设施(刀片/机架服务器+ 建设智慧云数据计算中心(云平台建 设) 磁盘阵列+云交换网络(机房双汇聚 智慧校园智能管理中心(四个统一:系统标 +TOR )+虚拟化软件平台+虚拟桌面系 准(信息、应用、集成)、数字业务定制、 统、云安全和各类云服务构件)共同构 IT 资源管理、信息安全管理) 建贵州理工学院云服务平台 云计算管理中心(虚拟化管理) 设置会议发言、扩声、音频处理、视频 满足报告厅举办演讲、报告等会议声学、视 显示、摄像、音视频切换、同声传译、 频显示、视频会议及音视频切换控制要求。 中控等设备 满足体 育馆的声学要求,具有足够的声压 设置场地扩声和观众席扩声 级、良好的语言清晰度、 均匀的声场,以及 题号:第七题 题目:校园导航问题 1,需求分析: 设计你的学校的平面图,至少包括10个以上的景点(场所),每两个景点间可以有不同的路,且路长也可能不同,找出从任意景点到达另一景点的最佳路径(最短路径)。 要求: (1)以图中顶点表示校园内各景点,存放景点名称、代号、简介等信息;以边表示路径,存放路径长度等有关信息。 (2)为来访客人提供图中任意景点相关信息的查询。 (3)为来访客人提供任意景点的问路查询,即查询任意两个景点之间的一条最短路径。 (4)修改景点信息。 实现提示: 一般情况下,校园的道路是双向通行的,可设计校园平面图是一个无向网。顶点和边均含有相关信息。 选做内容: (1)提供图的编辑功能:增、删景点;增、删道路;修改已有信息等。 (2)校园导游图的仿真界面。 2,设计: 2.1 设计思想: <1>,数据结构设计: (1)图。采用邻接矩阵存储,其中图所用到的结构体为: typedef struct { SeqList vertices; //表示图中的顶点 int Edge[MaxVertices][MaxVertices]; //表示图中的边 int numOfEdge; //表示图中边的数目}AdjMGraph; (2)景点。用顺序表存储。所用到的结构体为: typedef struct { char name[20]; //顶点名称 int code; //顶点代号 char introduction[50]; //顶点信息简介 }DataType; (3)景点之间的连接描述,所用到的结构体为: typedef struct { int row; int col; int weight; }RowColWeight; 用图来存放所提供的所有景点,然后用线性表来存放每一个景点的信息,其中包括景点的名称,代号,信息简介,以及其它的一些信息。这样就将对景点的操作,变成对图中各顶点的操作。 <2>,算法设计: 关于本课题的算法,很大部分来源于这学期数据结构课程的学习,其中包括: 智能公共交通系统在中国城市的应用及发展趋势 摘要:智能交通系统是目前国内外公认的解决城市交通拥堵问题的重要途径之一,也是费效比最显著的途径.作为国内城市交通系统最重要组成部分之一的公共交通系统,近年来开始出现了大量智能公共交通系统方面的应用尝试.对我国目前城市投入应用的智能公共交通系统(APTS)的应用状况进行了分析,并根据我国当前国情,分析了我国智能公交系统未来可能的应用方向,提出了对智能公共交通系统改进的技术趋势分析. 关键词:智能公共交通系统,GPS,IC卡,应用 引言 我国是发展中国家,虽然近20年来始终保持了经济的高速增长,但是与西方发达国家相比,在城市基础设施尤其是公共交通基础设施方面,依然存在着很大的差距.同时近年来随着我国城镇化水平的快速提高,城镇人口数量在急剧增加.此外,我国的城镇化时期恰好又伴随着机动化,这必然造成有限的城市道路空间与巨大的机动车增长之间的冲突,给本来就非常拥堵的城市交通增加了更大的压力. 从世界范围来看城市交通的发展,几十年来世界各工业化国家城市机动交通的发 展历程,大都走过了先发展小汽车,后控制小汽车,最终选择发展大公交的曲折道路.我国土地资源稀缺,城市人口密集,群众收入水平总体不高,优先发展城市公共交通更是我们的现实选择.近年来,我国各个主要城市在常规公交设施方面投资较大,城市公交运力得以快速增加,万人公交车辆拥有量由2001年的6.1辆增长到2004年的8.4辆.但是城市公共交通客运量并没有相应大幅度提高,部分城市呈现下降趋势.在出行方式结构方面,我国主要大城市公共交通基本呈现下降趋势,公 交客运量和运力的比值均在下降,运力的增加不一定带来运量的增加. 如图1所示,我国主要大城市历年公交运量Π公交运力比值都出现了大幅度下降[1]. 当前,城市居民对公共交通系统最大的不满主要就是公交服务水平低,例如公交出行速度慢、舒适性差、换乘困难等方面.在传统公交系统建设模式下,改善上述问题需要巨额建设经费的支持,其建设成效还要受到城市交通整体环境的影响.与 之相对应,智能公共交通系统则是实现“公交优先”的最有效的途径之一. 所谓智能公共交通系统,就是在公交网络分配、公交调度等关键理论研究的前提下,利用系统工程的理论和方法,将现代通信、信息、电子、控制、计算机、网络、GPS、GIS等新技术集成应用于公共交通系统,通过构建现代化的信息管理系统和控制调度模式,实现公共交通调度、运营、管理的信息化、现代化和智能化,为出行者提供更加安全、舒适、便捷的公共交通服务,从而吸引公交出行,缓解 城市交通拥挤,有效解决城市交通问题,创造更大的社会和经济效益[2]. 1国内智能公共交通管理系统的应用现状 智能公共交通系统作为智能交通系统重要的子系统之一,在我国“十五”科技攻关的智能交通系统(ITS)城市示范中,北京市、上海市、青岛市、杭州市、重庆市等多个城市的ITS建设示范中都包括了 智能公共交通系统的内容.将其作为缓解城市交通拥堵、提高城市公共交通服务水平的重要途径. 当前我国城市智能公共交通系统方面的应用,主要集中在如下几个领域中[3]. 1.1公交车辆智能调度系统 智慧校园管理系统功能简介 一.电子请假系统:一站式请假,各方联动。 1·学生出校信息可发送给班主任、家长和出入校控制系统; 2·具有统计功能,能够按照请假学生的事由、年级、班级等条件进行统计。各个老师依据自身权限能够第一时间查看管辖范围内当前的学生请假情况; 3·学校领导可随时进行查询和查看。 4·学生请假验证采用“刷脸”验证,及时反馈班主任和家长,且信息永久保存。 5·人脸识别系统严格把控,杜绝了以往学生使用假假条出校或以他人身份出校的情况; 6·有学生请假出校时,信息及时抄送给班主任和家长; 7·返校时人脸识别与出校信息做匹配以查证; 8·出校信息可存档留证,永久保存。 二、电子班牌:教室门口即可掌握班级各项信息,智能化班级管理。 1·安装在每个班门口可展示班级风采、任课教师风采、班级基本信息、学生请假信息、储物柜存取信息和发布通知公告的终端设备; 2·班主任具有修改电子班牌的全部权限; 3·班主任能够在本班班牌上发送通知以外,年级主任具有在年级内所有班牌发送通知的权限,学校领导则能够对全校的班牌发送通知; 三.宿舍考勤:通过宿舍考勤系统第一时间了解目前学生的归宿情况。 1·能够快速准确的识别归宿学生并记录,能够协助并减轻宿管晚上查寝的工作; 2·正常走动经过考勤设备处,设备屏幕显示学生姓名后即算作考勤成功; 3·宿管老师根据考勤系统屏幕上提供的考勤结果,可针对未考勤的学生进行重点查房,如发现问题即可及时向主管领导汇报; 4·宿舍考勤系统能够与请假系统联动,将学生请假信息显示在考勤结果中。 四.会议考勤系统:人脸识别办公考勤,大大节约教师考勤时间。 1·无需停留,可同时识别最高可达16人 2·可自动统计考勤结果 《校园导航系统》课程设计报告 姓名: 学号: 班级:网络 专业:网络工程 指导教师: 时间:2 目录 摘要 (1) 1.题目 (1) 2.概要设计 (1) 3.调试分析 (15) 4.参考文献 (15) 1.题目 校园导航系统 设计一个校园导游程序,后台操作: 1、操作员信息管理如修改密码等 2、能根据学校的规模进行添加景点信息、修改景点信息等功能, 3、若临时有交通管制,能进行交通管制的设置和撤销(如某某时间段那条路进行那个方向的交通管制等) 前台为来访的客人提供各种信息查询服务: 1、设计学校的校园平面图,所含景点不少于10个。以图中顶点表示校内各景点,存放景点名 称、代号、简介等信息;以边表示路径,存放路径长度等相关信息。 2、为来访客人提供图中任意景点相关信息的查询。 3、提供途中任意景点问路查询,即求任意两个景点间的一条最短的简单路径。 1.1 需求分析 设计一个校园导航系统,导航系统又分为游客和管理员。要进行管理操作还是游客操作由用户自己选择 管理员的操作:修改景点信息、增加景点信息、交通管制等。 游客的操作:查看景点信息和查最短路径。 2.概要设计 景点的信息由一维数组存放,景点关系由二维数据来存放 景点的信息和关系从文件读取,进而初始化 typedef struct //保存单个景点信息的结构体 { char code[10]; //存放景点代码 char name[20]; //存放景点名称 char instruction[100]; //存放景点简介 }ViewPoint; typedef struct //存放景点关系的二维数组 { int edges[MAXV][MAXV]; //两景点间的距离 int number; //景点的数量 ViewPoint V[MAXV]; //保存景点信息的结构体数组 }MGraph; 1.下列选项中,不属于生物特征识别技术的是()。(10.0分) A.步态识别 B.声纹识别 C.文本识别 D.虹膜识别 我的答案:C√答对 2.生物特征识别技术不包括()。(10.0分) A.体感交互 B.指纹识别 C.人脸识别 D.虹膜识别 我的答案:A√答对 3.立体视觉是()领域的一个重要课题,它的目的在于重构场景的三维几何信息。(10.0分) A.人机交互 B.虚拟现实 C.自然语言处理 D.计算机视觉 我的答案:D√答对 4.下列对人工智能芯片的表述,不正确的是()。(10.0分) A.一种专门用于处理人工智能应用中大量计算任务的芯片 B.能够更好地适应人工智能中大量矩阵运算 C.目前处于成熟高速发展阶段 D.相对于传统的CPU处理器,智能芯片具有很好的并行计算性能 我的答案:C√答对 1.目前,深度学习主要包括()。(10.0分)) A.前馈神经网络 B.卷积神经网络 C.循环神经网络 D.对抗神经网络 我的答案:ABCD√答对 2.关于人工智能,下列表述正确的有()。(10.0分)) A.计算机科学的一个分支 B.试图揭示人类智能的实质和真相 C.以模拟人类智能的方式去赋能机器 D.使机器能够模拟人类的智能进行学习、思维、推理、决策和行动 我的答案:ABCD√答对 1.神经网络的训练过程不需要人工标记的样本数据集。(10.0分)我的答案:错误√答对 2.机器人一般由执行机构、驱动装置、检测装置、控制系统和复杂机械等组成,涉及到控制论、机械电子、计算机、材料、仿生等学科,在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。(10.0分) 我的答案:正确√答对 3.自然语言处理是一门融语言学、计算机科学、数学于一体的科学。(10.0分)我的答案:正确√答对 4.卷积神经网络是一种常用来处理具有网格结构拓扑数据的神经网络,如处理时序数据和图像数据等,广泛应用于人脸识别、物品识别等领域。(10.0分) 我的答案:正确√答对人工智能简介及发展趋势
智能应用的发展趋势
数据结构课程设计-校园导航
人工智能未来发展前景展望
智能机器人的现状和发展趋势
物联网的智慧校园管理系统
校园导航系统
人工智能的发展前景
校园导航系统源代码
人工智能技术及其发展趋势
智能设备应用与前景
智慧校园智能化系统配置表
校园导航系统
智能公共交通系统在中国城市的应用及发展趋势
智慧校园管理系统模块简介
《校园导航系统》课程设计报告
人工智能技术及其发展趋势2020年