阵列信号处理中基于MUSIC算法的空间谱估计

万方数据
软件时空量,各阵元噪声满足空时白噪声的假设条件,即:
E[n(t)nH(f—f)】_盯28(r)x
E[n(t)n7(卜f)】-0(6)
阵列输出向量的二阶统计量用其外积的统计平
均表示,称之为阵列相关矩阵(将观测向量零均值化
则得到协方差矩阵)。定义为:
R=E[x(t)xH(f)】-ARsAH+仃2,(7)
式中R=E[s(t)s爿(f)】为信号的相关矩阵。
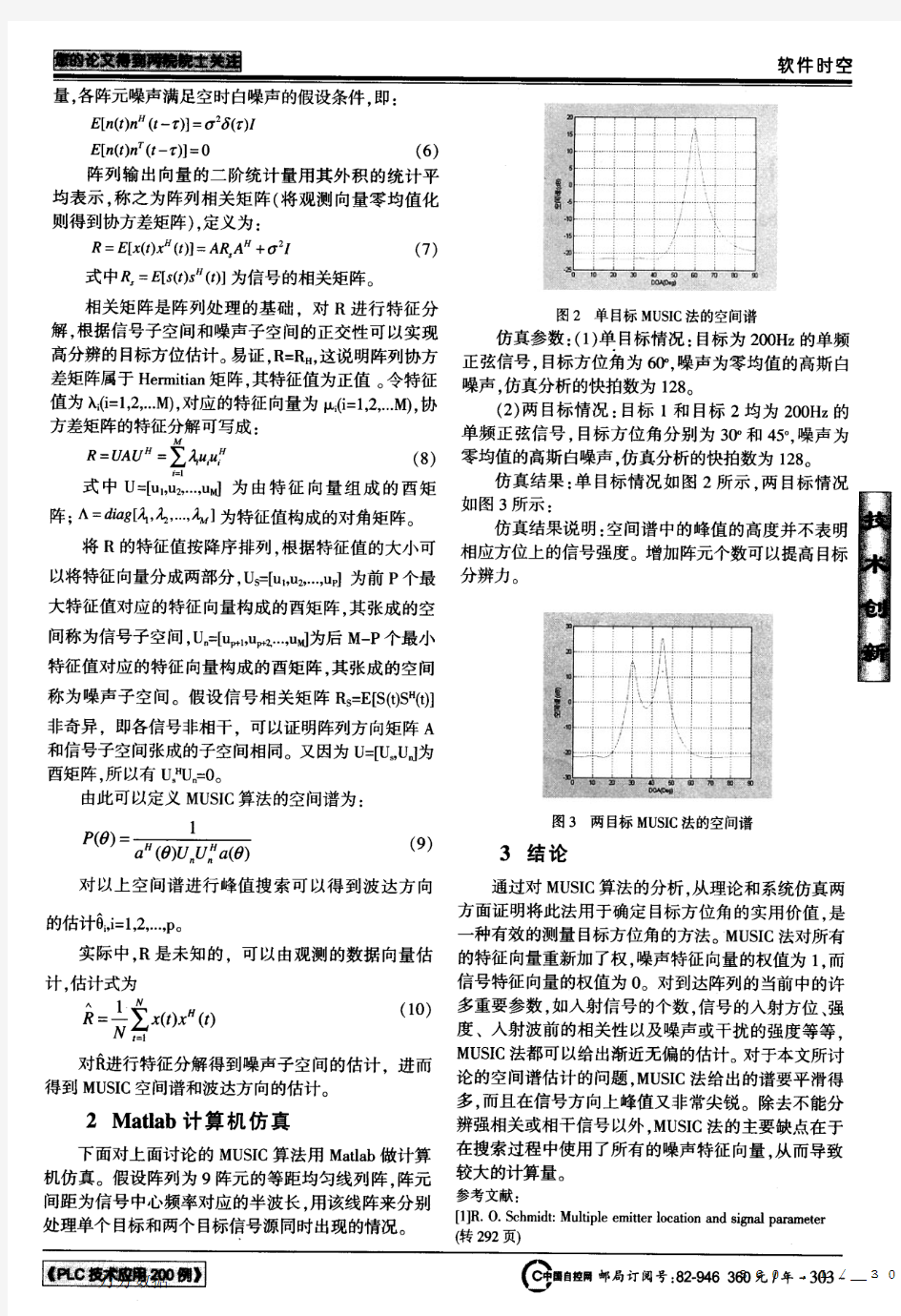
相关矩阵是阵列处理的基础,对R进行特征分图2单目标MUSIC法的空间谱
解,根据信号子空间和噪声子空间的正交性可以实现仿真参数:(1)单目标情况:目标为200H:的单频高分辨的目标方位估计。易证,R=RH,这说明阵列协方正弦信号,目标方位角为60。,噪声为零均值的高斯白差矩阵属于Hermitian矩阵,其特征值为正值。令特征噪声,仿真分析的快拍数为128。
值为hi(i=l…2一M),对应的特征向量为斗i(i=1…2一M),协(2)两目标情况:目标1和目标2均为200H:的方差矩阵的特征分解可写成:单频正弦信号,目标方位角分别为30。和45。,噪声为R=UAUH=y.缸∥,(8)零均值的高斯白噪声,仿真分析的快拍数为128。
式中u:【u。,ui=:1,--.,HM]为由特征向量组成的酉矩。。仿妻竺果:单目标情况如图2所示,两目标情况阵;A=diag[&,五,...,知]为特征值构成的对角矩阵。如图啬霎磊染说明:空间谱中的峰值的高度并不表明将R的特征值按降序排列,根据特征值的大小可相应方位上的信号强度。增加阵元个数可以提高目标以将特征向量分成两部分,Us=[U。,u:,...,ud为前P个最分辨力。
大特征值对应的特征向量构成的酉矩阵,其张成的空
间称为信号子空间,U。=[u吣u嵋…,u嗣为后M—P个最小
特征值对应的特征向量构成的酉矩阵,其张成的空间
称为噪声子空间。假设信号相关矩阵R。=E【S(t)SH(t)】
非奇异,即各信号非相干,可以证明阵列方向矩阵A
和信号子空间张成的子空间相同。又因为u=[u。,Ud为
酉矩阵,所以有usHU#O。
由此可以定义MUSIC算法的空间谱为:
删2蔬丽1(9)对以上空间谱进行峰值搜索可以得到波达方向的估计6;,i=l…2..,P。
实际中,R是未知的,可以由观测的数据向量估计,估计式为
食=专善z(力xH(力‘1。’对食进行特征分解得到噪声子空间的估计,进而得到MUSIC空间谱和波达方向的估计。
2Matlab计算机仿真
下面对上面讨论的MUSIC算法用Matlab做计算机仿真。假设阵列为9阵元的等距均匀线列阵,阵元间距为信号中心频率对应的半波长,用该线阵来分别处理单个目标和两个目标信号源同时出现的情况。
图3两目标MUSIC法的空间谱
3结论
通过对MUSIC算法的分析,从理论和系统仿真两方面证明将此法用于确定目标方位角的实用价值。是一种有效的测量目标方位角的方法。MUSIC法对所有的特征向量重新加了权.噪声特征向量的权值为1.而信号特征向量的权值为0。对到达阵列的当前中的许多重要参数,如入射信号的个数,信号的入射方位、强度、入射波前的相关性以及噪声或干扰的强度等等,MUSIC法都可以给出渐近无偏的估计。对于本文所讨论的空间谱估计的问题。MUSIC法给出的谱要平滑得多,而且在信号方向上峰值又非常尖锐。除去不能分辨强相关或相干信号以外,MUSIC法的主要缺点在于在搜索过程中使用了所有的噪声特征向量.从而导致较大的计算量。
参考文献:
[1】R.0.Schmidt:Multipleemitterlocationandsignalparameter(转292页1
@㈨同邮局订阮82?946
360,,L/_303—
万方数据
万方数据
阵列信号处理中基于MUSIC算法的空间谱估计
作者:刘刚, 吕新华, 攸阳, Liu,Gang, Lv,Xinhua, You,Yang
作者单位:刘刚,攸阳,Liu,Gang,You,Yang(102401,北京海军91917部队), 吕新华
,Lv,Xinhua(430033,湖北,省武,汉海军工程大学电子工程学院)
刊名:
微计算机信息
英文刊名:CONTROL & MANAGEMENT
年,卷(期):2006(12)
被引用次数:7次
参考文献(4条)
1.R O Schmidt Multiple emitter location and signal parameterestimation[外文期刊] 1986(02)
2.HayKin S;Keily J P Some aspects of arrays signal processing 1992(01)
3.张增林;施霞萍基于遗传算法的聚类分析在体型分析中的应用[期刊论文]-微计算机信息 2005(11)
4.Kundu D Modified MUSIC algorithm for estimating DOA of signals[外文期刊] 1996(01)
本文读者也读过(1条)
1.刘玲.LIU Xiao-ming.曾浩.LIU Ling.LIU Xiao-ming.ZENG Hao基于MATLAB的阵列信号处理仿真方法[期刊论文]-系统仿真学报2008,20(13)
引证文献(12条)
1.黄瑶.雷宏.夏玉立降维空时自适应处理研究[期刊论文]-微计算机信息 2009(6)
2.刘庭杰.胡瑞卿.李建东空间谱估计测向技术简介[期刊论文]-硅谷 2011(5)
3.杨松.李艳斌.李淳有向天线圆阵对椭圆极化信号的测向方法[期刊论文]-无线电工程 2011(1)
4.陆频.张志军不计信源数目的修正MUSIC算法分析[期刊论文]-微计算机信息 2007(30)
5.杨松.李艳斌.李淳有向天线圆阵对椭圆极化信号的测向方法[期刊论文]-无线电工程 2011(1)
6.廖春艳基于二阶和高阶统计量DOA估计算法的对比[期刊论文]-长沙大学学报 2012(2)
7.樊严.李炳荣.熊华空间谱估计阵列测向研究[期刊论文]-弹箭与制导学报 2008(5)
8.谢白玉.赵鹏基于改进MUSIC算法的信号DOA估计[期刊论文]-微计算机信息 2011(11)
9.庞宇.高秀娟几种DOA估计算法分析[期刊论文]-重庆工学院学报(自然科学版) 2007(11)
10.张平芳.CHENG Ren一种空间谱估计测向系统的研究与实现[期刊论文]-微计算机信息 2008(21)
11.张浩.张志军.朱国军同时估计非相干和相干信号的修正MUSIC算法[期刊论文]-微计算机信息 2007(21)
12.李翔.王辉实值GEESE算法对相干信号的DOA估计[期刊论文]-微计算机信息 2009(3)
本文链接:https://www.360docs.net/doc/6717303716.html,/Periodical_wjsjxx200612102.aspx
现代数字信号处理复习题
现代数字信号处理复习题 一、填空题 1、平稳随机信号是指:概率分布不随时间推移而变化的随机信号,也就是说,平稳随机信号的统计特性与起始 时间无关,只与时间间隔有关。 判断随机信号是否广义平稳的三个条件是: (1)x(t)的均值为与时间无关的常数:C t m x =)( (C 为常数) ; (2)x(t)的自相关函数与起始时间无关,即:)(),(),(ττx i i x j i x R t t R t t R =+=; (3)信号的瞬时功率有限,即:∞<=)0(x x R D 。 高斯白噪声信号是指:噪声的概率密度函数满足正态分布统计特性,同时其功率谱密度函数是常数的一类噪 声信号。 信号的遍历性是指:从随机过程中得到的任一样本函数,好象经历了随机过程的所有可能状态,因此,用一个 样本函数的时间平均就可以代替它的集合平均 。 广义遍历信号x(n)的时间均值的定义为: ,其时间自相关函数的定义为: 。 2、连续随机信号f(t)在区间上的能量E 定义为: 其功率P 定义为: 离散随机信号f(n)在区间 上的能量E 定义为: 其功率P 定义为: 注意:(1)如果信号的能量0 81 为了看清图3.3.4中交叉项的行为,我们将该图作了旋转,因此,水平方向为频率,垂直方向为时间。 图3.3.3 例3.3.3的WVD 图3.3.4 例3.3.4的WVD 例3.3.5 令 ()21 4 2 t x t e ααπ-??= ??? (3.3.5) 可求出其WVD 为 ()22,2exp[]x W t t ααΩ=--Ω (3.3.6) 这是一个二维的高斯函数,,且()Ω,t W x 是恒正的,如图3.3.5所示。 由该图可以看出,该高斯信号的WVD 的中心在()()0,0,=Ωt 处,峰值为2。参数α控制了WVD 在时间和频率方向上的扩展。α越大,在时域扩展越小,而在频域扩展越大,反之亦然。其WVD 的等高线为一椭圆。当WVD 由峰值降到1 -e 时,该椭圆的面积π=A 。它反映了时-频平面上的分辨率。 如果令 ()21 42t h t e ααπ-??= ???,()214 2 t x t e ββπ-??= ??? ,则()t x 的谱图 ()?? ????Ω+-+-+=Ω222 1exp 2,βαβααββααβ t t STFT x (3.3.7) 82 图3.3.5 例3.3.5的WVD,(a )高斯信号,(b )高斯信号的WVD 它也是时-频平面上的高斯函数。当其峰值降到1 -e 时,椭圆面积π2=A 。这一结果说明,WVD 比STFT 有着更好的时-频分辨率。 如果令 ()()t j e t t x t x 001Ω-= (3.3.8) 式中()t x 是(3.3.5)式的高斯函数。()t x 1是()t x 的时移加调制,其WVD 是: ()12 2 00,2exp[()()/]x W t t t ααΩ=---Ω-Ω (3.3.9) 它将(3.3.6)式的()Ω,t W x 由()()0,0,=Ωt 移至()()00,,Ω=Ωt t 处。其WVD 图形请读者自己画出。 例3.3.6 令 ()2201 4 22j t t j t z t e e e αβαπΩ-??= ??? (3.3.10) 它是由(3.3.5)式的()t x 与 西工大《阵列信号处理》复习考点整理 考试形式: 一、8道问答题,每道题5分; 二、六道大题,包括PPT 上老师给出的那一道。 一 1. 均匀线列阵在波束扫描时,波束图怎么变化? 当波束指向法线方向时,波束图具有最窄的主瓣宽度;随着阵元指向逐渐远离法线方向,主瓣一直指向所调方向并且展宽;除了指向法线方向外,主瓣都关于波束倾角轴不对称;当达到某一临界角时不能形成波束,但是在端射方向又可以形成波束。且在端射方向形成一个较宽的主瓣。 2.DI 是什么? DI 表示指向性指数,其表达式为 D 为方向性,是阵列和孔径的一个常用性能度量。 ???=ππ φθθφθπφθ200 ),(sin 41) ,(P d d P D T T 3. DC 加权的特点 (1)旁瓣级给定时,主瓣宽度最小; (2)主瓣宽度给定时,旁瓣级最低; (3)等旁瓣级。 4. 频域快拍模型是什么,步骤是什么,常用的频域快拍取的时间有什么关系? (1)记住《最优阵列处理技术》245页图 5.1 (2)步骤: ①把总的观测时间T 分为K 个不重叠的时间区域,区域长度为△T ; ②对时域快拍进行FT ; ③对频域向量(频域快拍)进行窄带波束形成; ④对上述频域信号进行IFT 。 (3)△T 的选择准则 ①△T 必须远大于平面波通过阵列的传播时间; ②△T 依赖于输入信号的带宽和信号的时域谱,16≥??T B (B*△T 足够大,选用频域快拍模型)。 5. 什么是均匀阵的瑞利限? 常规波束形成分辨率的极限。表达式为 6. 空间白噪声的阵增益的相关计算。 阵列增益ωA 的定义为阵列的输出SNR 和一个阵元上的输入SNR 的比值。下标“ω”表示空域不相关的噪声输入。表达式如下: 信号子空间: 设N 元阵接收p 个信源,则其信号模型为:()()()()1 p i i i i x t s t a N t θ== +∑ 在无噪声条件下,()()()()()12,, ,P x t span a a a θθθ∈ 称()()()()12 ,, ,P span a a a θθθ为信号子空间,是N 维线性空间中的P 维子空间,记为P N S 。P N S 的正交补空间称为噪声子空间,记为N P N N -。 正交投影 设子空间m S R ∈,如果线性变换P 满足, 则称线性变换 P 为正交投影。 导向矢量、阵列流形 设N 元阵接收p 个信源,则其信号模型为:()()()()1 p i i i i x t s t a N t θ== +∑,其中矢量()i i a θ称为 导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号 A 表示,即 (){|(0,2)}a A θθπ=∈ 波束形成 波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即 ()()()()H H y t W X t s t W a θ==,通过加权系数W 实现对θ的选择。 最大似然 已知一组服从某概率模型 ()f X θ的样本集12,, ,N X X X ,其中θ为参数集合,使条件概率 ()12,,,N f X X X θ最大的参数θ估计称为最大似然估计。 不同几何形态的阵列的阵列流形矢量计算问题 假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1 [1]i a θ= 然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差 n ?,则确定其导向矢量 ()2j n i a e πλ θ? = 1.均匀线阵方向图 %8阵元均匀线阵方向图,来波方向为0度 clc; clear all; close all; imag=sqrt(-1); element_num=8;%阵元数为8 d_lamda=1/2;%阵元间距d与波长lamda的关系 theta=linspace(-pi/2,pi/2,200); theta0=0;%来波方向 w=exp(imag*2*pi*d_lamda*sin(theta0)*[0:element_num-1]'); for j=1:length(theta) a=exp(imag*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]'); p(j)=w'*a; end figure; plot(theta,abs(p)),grid on xlabel('theta/radian') ylabel('amplitude') title('8阵元均匀线阵方向图') 当来波方向为45度时,仿真图如下: 8阵元均匀线阵方向图如下,来波方向为0度,20log(dB) 随着阵元数的增加,波束宽度变窄,分辨力提高:仿真图如下: 2.波束宽度与波达方向及阵元数的关系 clc clear all close all ima=sqrt(-1); element_num1=16; %阵元数 element_num2=128; element_num3=1024; lamda=0.03; %波长为0.03米 d=1/2*lamda; %阵元间距与波长的关系 theta=0:0.5:90; for j=1:length(theta); fai(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num1*d)); psi(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num2*d)); beta(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num3*d)); end figure; plot(theta,fai,'r',theta,psi,'b',theta,beta,'g'),grid on xlabel('theta'); ylabel('Width in radians') title('波束宽度与波达方向及阵元数的关系') 仿真图如下: 320 第11章 正交小波构造 我们在上一章中集中讨论了离散小波变换中的多分辨率分析,证明了在空间0V 中存在正交归一基}),({Z k k t ∈-φ,由)(t φ作尺度伸缩及位移所产生的},),({,Z k j t k j ∈φ是j V 中的正交归一基。)(t φ是尺度函数,在有的文献中又称其为“父小波”。同时,我们假定j V 的正交补空间j W 中也存在正交归一基},),({,Z k j t k j ∈ψ,它即是小波基,)(t ψ为小波函数,又称“母小波”。本章,我们集中讨论如何构造出一个正交小波)(t ψ。所谓“正交小波”,指的 是由)(t ψ生成的}),({Z k k t ∈-ψ,或j W 空间中的正交归一基},),({,Z k j t k j ∈ψ。 Daubechies 在正交小波的构造中作出了突出的贡献。本章所讨论的正交小波的构造方法即是以她的理论为基础的。 11.1 正交小波概述 现在举两个大家熟知的例子来说明什么是正交小波及对正交小波的要求, 一是Haar 小波,二是Shannon 小波。 1.Haar 小波 我们在10.1节中已给出Haar 小波的定义及其波形,见图10.1.1(d),Haar 小波的尺度函数 )(t φ如图10.1.1(a)所示。重写其定义,即 ??? ??-=011 )(t ψ 其它12/12/10<≤<≤t t (11.1.1) ? ??=01 )(t φ 其它10<≤t (11.1.2) 显然, )(t ψ的整数位移互相之间没有重叠,所以)()(),(' 'k k k t k t -=--δψψ,即它们 321 是正交的。同理, )()(),(',,' k k t t k j k j -=δψψ。 很容易推出)(t ψ和)(t φ的傅里叶变换是 4 /4 /sin )(22 /ωωωωj je -=ψ 2 /2 /sin )(2 /ωωωωj e -=Φ 注意式中ω实际上应为Ω。由于Haar 小波在时域是有限支撑的,因此它在时域有着极好的定位功能。但是,由于时域的不连续引起频域的无限扩展,因此,它在频域的定位功能极差,或者说频域的分辨率极差。 上一章指出,Haar 小波对应的二尺度差分方程中的滤波器是: ??????=21,21)(0n h ,??????-=21,2 1 )(1 n h (11.1.5) 它们是最简单的两系数滤波器。 2.Shannon 小波 令 t t t ππφsin )(= (11.1.6) 则 ?? ?=Φ01)(ω 其它π ω≤ (11.1.7) 由于 ?ΦΦ= --ωωωπ φφd k t k t k k )()(21 )(),(',0*,0' )(21')(' k k d e k k j -==? ---δωπ π π ω (11.1.8) 所以{}Z k k t ∈-),(φ构成0V 中的正交归一基。)(t φ称为Shannon 小波的尺度函数。 由于0,0)(V t k ∈φ,100-=⊕V W V ,由二尺度性质,1)2(V k t ∈-φ,因此 ???=Φ-0 1 )(,1ωk 其它πω2≤ (11.1.9) 这样,对0)(W t ∈ψ,有 1.设()u n 是离散时间平稳随机过程,证明其功率谱()w 0S ≥。 证明:将()u n 通过冲激响应为()h n 的LTI 离散时间系统,设其频率响应()w H 为 ()001,w -w w 0, w -w w H w ???? 输出随机过程()y n 的功率谱为()()()2y S w H w S w = 输出随机过程()y n 的平均功率为()()()00201 1r 022w w y y w w S w dw S w dw π π π+?-?= =?? 当频率宽度w 0???→时,上式可表示为()()()01 r 00y S w w π =?≥ 由于频率0w 是任意的,所以有()w 0 S ≥ 3、已知:状态方程 )()1,()1()1,()(1n n n n x n n F n x ν-Γ+--=观测方程 )()()()(2n n x n C n z ν+= )()]()([111n Q n n E H =νν )()]()([222n Q n n E H =νν 滤波初值 )]0([)|0(0x E x =ξ } )]]0([)0()]][0([)0({[)0(H x E x x E x E P --= 请简述在此已知条件下卡尔曼滤波算法的递推步骤。 解:步骤1 状态一步预测,即 1 *11)|1(?)1,()|(N n n C n x n n F n x ∈--=--∧ ξξ 步骤2 由观测信号z(n)计算新息过程,即 1*11)|(?)()()|(?)()(M n n C n x n C n z n z n z n ∈-=-=--ξξα 步骤3 一步预测误差自相关矩阵 N N H H C n n n Q n n n n F n P n n F n n P *1)1,()1()1,() 1,()1()1,()1,(∈-Γ--Γ+---=- 步骤4 新息过程自相关矩阵M M H C n Q n C n n P n C n A *2)()()1,()()(∈+-= 步骤5 卡尔曼增益M N H C n A n C n n P n K *1)()()1,()(∈-=- 或 )()()()(1 2n Q n C n P n K H -= 步骤6 状态估计 1*1)()()|(?)|(?N n n C n n K n x n x ∈+=-αξξ 步骤7 状态估计自相关矩阵 N N C n n P n C n K I n P *)1,()]()([)(∈--= 或 )()()()]()()[1,()]()([)(2n K n Q n K n C n K I n n P n C n K I n P H H +---= 步骤8 重复步骤1-7,进行递推滤波计算 4、经典谱估计方法: “现代数字信号处理”复习思考题 变换 1.给出DFT的定义和主要性质。 2.DTFT与DFT之间有什么关系? 3.写出FT、DTFT、DFT的数学表达式。 离散时间系统分析 1.说明IIR滤波器的直接型、级联型和并联型结构的主要特点。 2.全通数字滤波器、最小相位滤波器有何特点? 3.线性相位FIR滤波器的h(n)应满足什么条件?其幅度特性如何? 4.简述FIR离散时间系统的Lattice结构的特点。 5.简述IIR离散时间系统的Lattice结构的特点。 采样 1.抽取过程为什么要先进行滤波,此滤波器应逼近什么样的指标? 维纳滤波 1.画出Wiener滤波器结构,写出平稳信号下的滤波方程,导出Wiener-Hopf方程。 2.写出最优滤波器的均方误差表示式。 3.试说明最优滤波器满足正交性原理,即输出误差与输入信号正交。 4.试说明Wiener-Hopf方程和Yule-Walker方程的主要区别。 5.试说明随机信号的自相关阵与白噪声的自相关阵的主要区别。 6.维纳滤波理论对信号和系统作了哪些假设和限制? 自适应信号处理 1.如何确定LMS算法的μ值,μ值与算法收敛的关系如何? 2.什么是失调量?它与哪些因素有关? 3.RLS算法如何实现?它与LMS算法有何区别? 4.什么是遗忘因子,它在RLS算法中有何作用,取值范围是多少? 5.怎样理解参考信号d(n)在自适应信号处理处理中的作用?既然他是滤波器的期望响应,一般在滤波前是不知道的,那么在实际应用中d(n)是怎样获得的,试举两个应用例子来加以说明。 功率谱估计 1.为什么偏差为零的估计不一定是正确的估计? 2.什么叫一致估计?它要满足哪些条件? 3.什么叫维拉-辛钦(Wiener-Khinteche)定理? 4.功率谱的两种定义。 5.功率谱有哪些重要性质? 6.平稳随机信号通过线性系统时输入和输出之间的关系。 7.AR模型的正则方程(Yule-Walker方程)的导出。 8.用有限长数据估计自相关函数的估计质量如何? 9.周期图法谱估计的缺点是什么?为什么会产生这些缺点? 10.改进的周期图法谱估计有哪些方法?它们的根据是什么? 11.既然隐含加窗有不利作用,为什么改进周期图法谱估计是还要引用各种窗? 12.经典谱估计和现代谱估计的主要差别在哪里? 13.为什么AR模型谱估计应用比较普遍? 14.对于高斯随机过程最大熵谱估计可归结为什么样的模型? 15.为什么Levison-Durbin快速算法的反射系数的模小于1? 16.什么是前向预测?什么是后向预测? 17.AR模型谱估计自相关法的主要缺点是什么? 18.Burg算法与Levison-Durbin算法的区别有哪些? 宽带信号中的三种二维平面阵DOA估计 宽带信号中的三种二维平面阵DOA 估计 一. 背景 目前关于阵列窄带信号的高分辨算法已比较成熟,但是随着信号处理技术的发展,信号环境日趋复杂,信号形式多样,信号密度日渐增大,窄带阵列探测系统的确定逐渐显示出来。 由于宽带信号具有目标回波携带的信息量大,有利于目标探测、参量估计和目标特征提取等特点,在有源探测系统中越来越多地得到应用。而在无源探测系统中,利用目标辐射的宽带连续谱进行目标检测是有效发现目标的一种重要手段。 ISM 方法把宽带信号在频域分解为J 个窄带分量,然后在每一个子带上直接进行窄带处理。因为信号为调频信号,所以信号在时域的分段实际上就是频域的分段。将信号分解为窄带信号后,我们就可以利用窄带算法进行处理,最后将各个结果进行加权综合,即可得到最终的结果。 二维DOA 估计是阵列信号处理中的重要内容,通过二维DOA 估计可以得到信号源在平面中的角度信息。一般采用L 型、面阵和平行阵或矢量传感器实现二维参数的估计,多数有效的二维DOA 估计算法是在一维DOA 估计的基础上,直接针对空间二维谱提出的,如二维MUSIC 算法以及二维CAPON 算法等。这两种算法可以产生渐进无偏估计,但要在二维参数空间搜索谱峰,计算量相当大。而采用二维ROOT MUSIC 算法可以减小计算量,但是需要付出精度下降的代价。 本次报告将结合宽带信号和二维DOA 估计算法,进行相关的算法介绍和仿真。 二. 算法介绍 1. 接收信号模型: 图 1 平面阵列示意图 如图1所示,设平面阵元数为M ×N ,信源数为K 。信源的波达方向为11(,),,(,)k k θφθφ , 第i 个阵元与参考阵元之间的波程差为: 2(cos sin sin sin cos )/i i i x y z βπφθφθθλ=++ 设子阵1沿x 轴的方向矩阵为x A ,而子阵2的每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上2sin sin /d πφθλ,所以接收信号为 1 第1章 信号分析基础 1.1 信号的时-频联合分析 我们生活在一个信息社会里,而信息的载体就是我们本书要讨论的主题——信号。在我们身边以及在我们身上,信号是无处不在的。如我们随时可听到的语音信号,随时可看到的视频图像信号,伴随着我们生命始终的心电信号,脑电信号以及心音、脉搏、血压、呼吸等众多的生理信号。 对一个给定的信号,如)(t x ,我们可以用众多的方法来描述它,如)(t x 的函数表达式, 通过傅立叶变换所得到的)(t x 的频谱,即)(Ωj X ,再如)(t x 的相关函数,其能量谱或功率谱等。在这些众多的描述方法中,有两个最基本的物理量,即时间和频率。显然,时间和频率与我们的日常生活关系最为密切,我们时时可以感受到它们的存在。时间自不必说,对频率,如夕阳西下时多变的彩霞,音乐会上那优美动听的旋律以及在一片寂静中突然冒出的一声刺耳的尖叫等,这些都包含了丰富的频率内容。正因为如此,时间和频率也成了描述信号行为的两个最重要的物理量。 信号是变化着的,变化着的信号构成了我们周围五彩斑斓的世界。此处所说的“变化”,一是指信号的幅度随时间变化,二是指信号的频率内容随时间变化。幅度不变的信号是“直流”信号,而频率内容不变的信号是由单频率信号,或多频率信号所组成的信号,如正弦波、方波、三角波等。不论是“直流”信号还是正弦类信号都只携带着最简单的信息。 给定了信号)(t x 的函数表达式,或x 随t 变化的曲线,我们可以由此得出在任一时刻处 该信号的幅值。如果想要了解该信号的频率成分,即“在××Hz 处频率分量的大小”,则可通过傅立叶变换来实现,即 ?∞ ∞ -Ω-=Ωdt e t x j X t j )()( (1.1.1a ) ? ∞ ∞ -ΩΩΩ= d e j X t x t j )()(21π (1.1.1b ) 式中f π2=Ω,单位为弧度/秒,将)(Ωj X 表示成) (|)(|ΩΩ?j e j X 的形式,即可得到 |)(|Ωj X 和)(Ω?随Ω变化的曲线,我们分别称之为)(t x 的幅频特性和相频特性。 如果我们想知道在某一个特定时间,如0t ,所对应的频率是多少,或对某一个特点的频 第5章信号的抽取与插值 5.1前言 至今,我们讨论的信号处理的各种理论、算法及实现这些算法的系统都是把抽样频率 f视为恒定值,即在一个数字系统中只有一个抽样率。但是,在实际工作中,我们经常会s 遇到抽样率转换的问题。一方面,要求一个数字系统能工作在“多抽样率(multirate)”状态,以适应不同抽样信号的需要;另一方面,对一个数字信号,要视对其处理的需要及其自身的特征,能在一个系统中以不同的抽样频率出现。例如: 1. 一个数字传输系统,即可传输一般的语音信号,也可传输播视频信号,这些信号的频率成份相差甚远,因此,相应的抽样频率也相差甚远。因此,该系统应具有传输多种抽样率信号的能力,并自动地完成抽样率的转换; 2. 如在音频世界,就存在着多种抽样频率。得到立体声声音信号(Studio work)所用的抽样频率是48kHz,CD产品用的抽样率是44.1kHz,而数字音频广播用的是32kHz[15]。 3. 当需要将数字信号在两个具有独立时钟的数字系统之间传递时,则要求该数字信号的抽样率要能根据时钟的不同而转换; 4.对信号(如语音,图象)作谱分析或编码时,可用具有不同频带的低通、带通及高通滤波器对该信号作“子带”分解,对分解后的信号再作抽样率转换及特征提取,以实现最大限度减少数据量,也即数据压缩的目的; 5. 对一个信号抽样时,若抽样率过高,必然会造成数据的冗余,这时,希望能在该数字信号的基础上将抽样率减下来。 以上几个方面都是希望能对抽样率进行转换,或要求数字系统能工作在多抽样率状态。近20年来,建立在抽样率转换理论及其系统实现基础上的“多抽样率数字信号处理”已成为现代信号处理的重要内容。“多抽样率数字信号处理”的核心内容是信号抽样率的转换及滤波器组。 减少抽样率以去掉过多数据的过程称为信号的“抽取(decimatim)”,增加抽样率以增加数据的过程称为信号的“插值(interpolation)。抽取、插值及其二者相结合的使用便可实现信号抽样率的转换。 推荐精选 现代数字信号处理实验报告 1、估计随机信号的样本自相关序列。先以白噪声()x n 为例。 (a) 产生零均值单位方差高斯白噪声的1000个样点。 (b)用公式: 999 1?()()()1000x n r k x n x n k ==-∑ 估计()x n 的前100个自相关序列值。与真实的自相关序列()()x r k k δ=相比较,讨论你的估计的精确性。 (c) 将样本数据分成10段,每段100个样点,将所有子段的样本自相关的平均值作为()x n 自相关的估值,即: 999 00 1?()(100)(100) , 0,1,...,991000x m n r k x n m x n k m k ===+-+=∑∑ 与(b)的结果相比,该估计值有什么变化?它更接近真实自相关序列()()x r k k δ=吗? (d)再将1000点的白噪声()x n 通过滤波器1 1 ()10.9H z z -= -产生1000点的y (n ),试重复(b)的工作,估计y (n )的前100个自相关序列值,并与真实的自相关序列()y r k 相比较,讨论你的估计的精确性。 仿真结果: (a) 图1.1零均值单位方差高斯白噪声的1000个样本点 分析图1.1:这1000个样本点是均值近似为0,方差为1的高斯白噪声。(b) 图1.2() x n的前100个自相关序列值 分析上图可知:当k=0时取得峰值,且峰值大小比较接近于1,而当k≠0时估计的自相关值在0附近有小幅度的波动,这与真实自相关序列r (k)=δ(k) x 比较接近,k≠0时估计值非常接近0,说明了估计的结果是比较精确的。 仿真作业 姓名:李亮 学号:S130101083 4.17程序 clc; clear; for i=1:500 sigma_v1=0.27; b(1)=-0.8458; b(2)=0.9458; a(1)=-(b(1)+b(2)); a(2)=b(1)*b(2); datlen=500; rand('state',sum(100*clock)); s=sqrt(sigma_v1)*randn(datlen,1); x=filter(1,[1,a],s); %% sigma_v2=0.1; u=x+sqrt(sigma_v2)*randn(datlen,1); d=filter(1,[1,-b(1)],s); %% w0=[1;0]; w=w0; M=length(w0); N=length(u); mu=0.005; for n=M:N ui=u(n:-1:n-M+1); y(n)=w'*ui; e(n)=d(n)-y(n); w=w+mu.*conj(e(n)).*ui; w1(n)=w(1); w2(n)=w(2); ee(:,i)=mean(e.^2,2); end end ep=mean(ee'); plot(ep); xlabel('迭代次数');ylabel('MSE');title('学习曲线'); plot(w1); hold; plot(w2); 仿真结果: 步长0.015仿真结果 0.10.20.30.4 0.50.60.7迭代次数 M S E 学习曲线 步长0.025仿真结果 步长0.005仿真结果 4.18 程序 data_len = 512; %样本序列的长度 trials = 100; %随机试验的次数 A=zeros(data_len,2);EA=zeros(data_len,1); B=zeros(data_len,2);EB=zeros(data_len,1); for m = 1: trials a1 = -0.975; a2 = 0.95; sigma_v_2 =0.0731; v = sqrt(sigma_v_2) * randn(data_len, 1, trials);%产生v(n) u0 = [0 0]; num = 1; den = [1 a1 a2]; Zi = filtic(num, den, u0); %滤波器的初始条件 u = filter(num, den, v, Zi); %产生样本序列u(n) %(2)用LMS滤波器来估计w1和w2 mu1 = 0.05; mu2 = 0.005; w1 = zeros(2, data_len); 现代数字信号处理期末试题 1.短时Fourier变换、小波变换和Gabor变换都是时频信号分析的(线性变换)或(线性时频)表示,而Wigner-Ville分布则属于时频信号分析的(非线性变换)。 2. 简述小波变换的概念及其优点。 答:小波变换从基函数角度出发,吸取傅里叶变换中的三角基(进行频率分析)与短时傅里叶变换中的时移窗函数的特点,形成振荡、衰减的基函数,因为它的定义域有限,故称为小波。小波基函数是时间t、尺度因子a和时移参数b的函数。 小波变换的优点: ⑴小波分解可以覆盖整个频域(提供了一个数学上完备的描述)。 ⑵小波变换通过选取合适的滤波器,可以极大的减小或去除所提取得不同特征之间的相关性。 ⑶小波变换具有“变焦”特性,在低频段可用高频率分辨率和低时间分辨率(宽分析窗口),在高频段,可用低频率分辨率和高时间分辨率(窄分析窗口)。 ⑷小波变换实现上有快速算法(Mallat小波分解算法)。 3. 相对于Mallat塔形算法而言,第二代小波方法的优势在哪里? 答:1.它不依赖于傅里叶变换,完全在时域中完成对双正交小波的构造,具有结构化设计和自适应构造方面的有点 2.构造方法灵活,可以从一些简单的小波函数,通过提升改善小波函数的特性,从而构造出具有期望特性的小波 3.不再是某一给定小波函数的伸缩和平移,它适合于不等间隔采样问题的小波构造 4.算法简单,运算速度快,占用内存少,执行效率高,可以分析任意长度的信号。4.EMD方法在机械设备故障诊断中的应用有(机车轮对轴承损伤定量识别方法)、(烟气轮机摩擦故障诊断)。 5. 随机信号特点? 答:随机信号也称随机过程,随机信号在任何时间的取值都是不能先验证确定的随机变量。虽然随机信号取值不能先验证确定,但这些取值却服从某种统计规律,换言之,随机信号或过程可以用概率分布特点(简称统计性能)统计的描述。6. 简述经典功率谱估计与现代功率谱估计的差别。 答:功率谱反映了随机信号各频率成份功率能量的分布情况,可以揭示信号中隐含的周期性及靠得很近的谱峰等有用信息,在许多领域都发挥了重要作用。然而,实际应用中的平稳随机信号通常是有限长的,只能根据有限长信号估计原信号的真实功率谱,这就是功率谱估计。功率谱估计分为经典谱估计和现代谱估计。经典谱估计是将数据工作区外的未知数据假设为零,相当于数据加窗,主要方法有相关法和周期图法;现代谱估计是通过观测数据估计参数模型再按照求参数模型输出功率的方法估计信号功率谱,主要是针对经典谱估计的分辨率低和方差性能不好等问题提出的。 7.自适应滤波方法主要是基于几种基本理论再融合递推算法导出来的? 答:(1)基于维纳滤波理论的方法。基于维纳滤波原理,利用相关的瞬时值通过在工作过程中的逐步调整参数逼近信号的统计特性,实现最优滤波。由此得到一种最常用的算法——最小均方算法,简称LMS算法 (2)基于卡尔曼滤波理论的方法。利用卡尔曼滤波理论的递推求解法导出自适应滤波器更新权矢量得不同递推算法。 %----------对角加载(LSMI 和SMI)方向图----------------------- %总结:这种算法主要给出了一种对角加载值的计算方法,对误差具有一定的稳健性,研究发现 %当数据协方差矩阵中含有信号分量会影响算法的性能。 clearall;clearall;clc; ratio_d_and_w=0.5; N_array=20;%阵列数 N_signal=60;% 样本数 ang1=0*pi/180;%所需信号的方向 SNR=5;%信噪比 ASd=sqrt(10.^(SNR/10)); ang2=40*pi/180;%干扰信号的方向 INR=45;%干噪比 ASi=sqrt(10.^(INR/10)); Sd=ASd*(randn(1,N_signal)+i*randn(1,N_signal));%Sd为所需信号 Si=ASi*(randn(1,N_signal)+i*randn(1,N_signal));%Si为干扰信号 Ni=randn(N_array,N_signal)+i*randn(N_array,N_signal);%Ni内噪声 Desired_Array=zeros(N_array,N_signal); Interferential_Array=zeros(N_array,N_signal); for LL=1:N_signal Interferential_Array(:,LL)=Si(LL)*test(ang2,N_array,ratio_d_and_w).'; Desired_Array(:,LL)=Sd(LL)*test(ang1,N_array,ratio_d_and_w).'; end X=zeros(N_array,N_signal); X= Interferential_Array +Ni; Rx=X*X'/N_signal; mm=std(diag(Rx));%对角加载值的确定下限 %mm=trace(Rx)/N_array;%对角加载值的确定上限 R1=Rx+mm*eye(size(Rx)); R=inv(R1); A_est=test(ang1,N_array,ratio_d_and_w); C= A_est; w_SMI=R*C/(C'*R*C);%对角加载 w_LSMI=inv(Rx)*C/(C'*inv(Rx)*C);%普通的Capon算法 第一章 ) ,(服从正态分布,即之间的唯一性定理知:由特征函数与分布函数)()()()()()(的特征函数则),,,(此外,)(的特征函数为: )()()()()。概率密度函数为: ,(服从正态分布,即 、证明:∑ ∑∑∑∑∑ ∑ =-=-===-=? ? ? ???---= -x T x x T T T x x T T T T T x T x N x T T x X x T x x x N x x B B B m N X B B B B m j B B B m j B f f t t t t t t t m j t f X m X m X x p m N X X ~]2 1exp[]2 1exp[ ]2 1exp[21exp 21 ~121121 2 ξξμμμμμμμμξπξ [] 相互独立。 与) ()()()(),(的联合概率密度函数为 ,),(的协方差为 ,的协方差为 设、证明: Y X Y p X p Y Y X X Y X R Y X R Y X p Y X Y X E R Y X Cov Y X T X T X Y X M N T XY T XY M N Y X Y X T Y X N N N N ∴=??????--= ??? ?????????????????????-= ∴??? ???? ?===∑∑∑ ∑∑ ∑ ∑ ∑ ++??2121exp 21 21exp 21 00 ][22 12122 12 ππ 。 且,则,,则要使))((则,为常量。,其中设、证明: ∑ = =-==∴====+-=----==+=x T x x xx ee x T ee T T x x xx T x x ee T x x x Cov m m R R m x a a a aa R aa m m R a m x a m x E R ee E a a m x ),(?0 0min ] [][?3 阵列信号处理课程2011年作业 第1题 假定半波长间隔均匀分布线列阵的阵元数N =16,若入射平面波为62.5Hz 的正弦信号,信号持续时间为0.4s ,系统采样频率为1kHz ,阵列加权方式为均匀加权。分别给出 1. 当平面波信号分别从0,10, 20, 30, 40, 50, 60, 70, 80, 90, 100度方向入射时,指向90度的波束形成器的输出序列。 2. 当平面波信号分别从0:1:180度方向入射时,指向90度的波束形成器的输出序列经过平方求和后的分贝数输出。(把所有181个输出绘制在同一幅图中) 1)仿真图 图一:所求角度入射信号输出序列三维表示 注: 1. θ为信号入射角度,取值从0度到100度,每10°为一个间隔; 2. T 为整个阵元采样时间,对于不同的入射角度,t 的取值范围不同; 3. 输出信号幅度表示所有阵元的求和输出幅度,为有噪声情况。 结论: 0.8 t 输出信号幅度 从图一可以看出:①从90°入射的信号输出序列没有得到衰减,而其它角度入射的都得到了衰减;②从100°入射的信号和从80°入射的信号输出序列关于90°方向是对称的;③整个阵列对噪声有很好的抑制作用。 图二:入射信号0°到50°的输出序列 图三:入射信号60°到100°的输出序列 结论: 从图二和图三可以看出:①图一的所有结论;②90°方向入射信号没 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 0。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 10。 0.10.20.30.40.5 -0.2 -0.100.1 0.2 t A m p l i t u d e 20。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 30。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 40。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 50。 0.10.2 0.30.40.5 t A m p l i t u d e 60。 0.1 0.20.30.4 t A m p l i t u d e 70。 0.1 0.20.30.4 t A m p l i t u d e 80。 0.1 0.20.30.4 t A m p l i t u d e 90。 0.1 0.20.30.4 t A m p l i t u d e 100。 现代数字信号处理Advanced Digital Signal Processing 东南大学信息科学与工程学院 杨绿溪 教科书、参考书 ?杨绿溪, 现代数字信号处理, 科学出版社, 2008年12月。?胡广书,数字信号处理----理论、算法与实现,清华大学出版社,1997(或2003)年。 ?皇甫堪等,现代数字信号处理,电子工业出版社,2004年6月。 ?丁玉美等,数字信号处理-----时域离散随机信号处理,西安电子科技大学出版社,2002年12月。 ?金连文,韦岗,现代数字信号处理简明教程,清华大学出版社,2004年1月。 ?何子述等,现代数字信号处理及其应用,清华大学出版社,2009年5月。 ?S.Haykin, Adaptive Filter Theory, Prentice Hall, 2001. 课程基本内容 1.离散时间信号处理基础(本科内容复习) 2.离散随机信号分析基础 –离散时间随机信号基本概念? –基本的正交变换(与信号正交展开、去相关) –基本的参数估计方法 3.线性预测和格型滤波器(语音编码应用)? 4.随机信号的线性建模? 5.功率谱估计(与频率估计、子空间分析)? 6.最优线性滤波: 维纳滤波与卡尔曼滤波? 7.自适应滤波器(线性系统的学习)? 可能选讲或简介的内容 8.多速率数字信号处理和滤波器组 9. 神经智能信息处理;压缩感知等 10. 盲信号处理 11.空时、阵列与MIMO信号处理 12.信号的时频分析 第一章离散时间信号处理基础??本科课程内容复习?? ?数字信号与数字信号处理(DSP)概述 ?滤波器--简单的数字信号处理系统 ?信号的变换-z变换、DTFT、DFT和FFT ?特殊的序列(和对应的滤波器) –全通序列、最小相位序列、线性相位、半正定序列 阵列信号处理仿真作业 需要解决的问题: 使用优化算法(可以使用遗传算法)挑选旁瓣相消的阵元 要求:(只需要选择一个突破点即可) ①可以针对不同类型的干扰、连片杂波、地杂波或密集型干扰等进行优化 ②也可以考虑存在阵列误差 下面我们针对第一个突破点进行仿真: 一、基本原理 图1给出了一般阵元级部分自适应处理的框图,通常称为多旁瓣相消器。 1 N H x 图1. 多旁瓣相消器结构部分自适应处理框图 如图1所示,整个天线阵的阵元加导向矢量权及用于压低旁瓣的锥削,可得到主通道输出0()m t ,0()m t 的方向图就指向目标方向,而从天线阵中选出M 个阵元作自适应单元,自适应单元加权为H x W ,于是得到主通道输出 00()()H m t t =W X ,辅助通道输出为()H x t W Y 。所以整个自适应信号处理器的输出为 0()()()H x e t m t t =-W Y (1) 其中0()m t 表示为主通道的输出;12[,,,]T M y y y =Y L 为选取的辅助单元接收的信 号;12[,,,]H T x M w w w ***=W L 为自适应权值;()H x t W Y 为形成辅助通道的输出。 在最小均方误差的准则下,求出的自适应权值就演变成为一个优化问题 220min ()min ()()H x E e t E m t t ?????-?????? W Y (2) 得 1 0()()()()H H x E t t E t m t -* ????=????W Y Y Y (3) 为了保证目标信号不损失,应对自适应权作约束,约束条件是在目标信号的 方向上,阵列自适应处理的增益为一常数。即在权值调整过程中,无论权x W 怎 样变化,对有用信号的增益不变。这样在使自适应阵输出()e t 的均方值2 ()E e t ?? ?? 最小时,能最大限度地抑制干扰且不损失有用信号能量。图1中应用式( 2) 的无 约束优化方程显然不合理,它不能保证有用信号增益不变。即由于辅助通道中包含有用信号的能量,就会导致辅助阵元中目标信号分量与主通道中目标信号相减,引起目标信号对消,导致目标增益下降。对此,应设法阻塞目标信号进入辅助支路,避免信号对消现象。一种方法是在优化方程中加入单位增益约束,强制目标方向增益不变,这样的优化方程求解比较麻烦,而且不适合自适应单元自动选取的算法。 这里,采用信号阻塞矩阵来抑制目标信号,使目标信号能量不能进入辅助通道。 0=X JX (4) 其中12[,,,]T N x x x =X L 为阵列信号;01020(1)0[,,,]T N x x x -=X L ;J 为信号阻塞矩阵(N -1)×N 。 在一般情况下,信号到达角为0θ,则信号阻塞矩阵J 可表示为 00001exp(())001exp(())01exp(())0 001exp(())j j j j ?θ?θ?θ?θ??--??--=??--??--??J L L L L 其中002()sin()d π?θθλ =,当00θ=?时,阻塞矩阵变为 11000110 0000 11-??-????=? ?????-?? J L L L L L L L L 这样就得到整个自适应系统框图(图2)。 图2中上支路为主通道, 保证信号完全通过,其加权为导向矢量权和压低旁瓣的锥削。下支路为辅助支路,信号阻塞矩阵阻止信号能量通过,将N 个阵元信号变成N -1个信号(降维),然后由辅助单元选择通路并选择参与自适应的单元,加自适应权后与上支路信号相减,得到自适应输出。现代信号处理教程 - 胡广书(清华)
西工大《阵列信号处理》考点整理
阵列信号处理知识点
阵列信号处理方面10个经典程序
现代信号处理教程 - 胡广书(清华)
现代数字信号处理习题
2012《现代数字信号处理》课程复习...
阵列信号处理
现代信号处理教程 - 胡广书(清华)
现代信号处理教程---胡广书(清华)
现代数字信号处理实验报告
现代数字信号处理及应用仿真题答案
现代数字信号处理期末试题
阵列信号处理对角加载算法matlab程序
姚天任现代数字信号处理习题解答第一章答案
阵列信号处理作业
现代数字信号处理
阵列信号处理仿真作业