一种多相机视觉测量系统的全局标定方法
一一第39卷一第5期一吉首大学学报(自然科学版)V o l.39一N o.5一一一一2018年9月J o u r n a l o f J i s h o uU n i v e r s i t y(N a t u r a l S c i e n c eE d i t i o n)S e p t.2018一一
文章编号:10072985(2018)05003808
一种多相机视觉测量系统的全局标定方法?
黄东兆,赵前程
(湖南科技大学机械设备健康维护湖南省重点实验室,湖南湘潭411201)
一一摘一要:提出了一种基于双平面靶标的多相机全局标定方法,要求两靶标之间为刚性联接,绕同一根轴旋转,但它们之间的相对位姿关系可以是未知的.该方法不仅适用于立体视觉测量系统,也适用于基于单目视觉的多相机测量系统,应用于四轮定位仪中多相机相对位姿关系的出厂标定,标定精度满足出厂要求.
关键词:多相机测量系统;全局标定;视觉测量;单目视觉
中图分类号:T P391.7一一一一一一一文献标志码:A D O I:10.13438/j.c n k i.j d z k.2018.05.009
单个相机都受一定的视野范围限制,为了满足高精度二宽视野的工业测量任务,通常需要用多个相机组建一个具有更大视觉空间范围的测量系统.对每个相机进行内参标定,只能在单个相机坐标系下建立视觉测量模型.由于各相机坐标系彼此独立,因此所有相机的测量结果需要统一到其中一个相机坐标系或一个全局坐标系中来表达.统一的过程被称为多相机测量系统位姿关系的全局标定.通常使用 金规校准 (需1个制作精确的标准件作为参考基准)与 银规校准 (需1个经过坐标测量机标定后的标准件作为参考基准)对多相机系统进行全局标定,但在日常搬运中要防止标准件不受损害是相当困难的.因此,张广军[1]提出了使用双电子经纬仪或单电子经纬仪加靶标进行全局标定的方法.该方法精度高,但电子经纬仪价格昂贵,普适性受限.其他一些方法[23]无需贵重仪器,但仅适用于立体视觉测量系统,不能应用于单目视觉系统.多相机测量系统全局标定的本质是确定系统中相机两两之间的相对位姿关系[4],只要任意两相机间的相对位姿关系确定了,就完成了多相机系统的全局标定.笔者提出了一种基于双平面靶标的两相机相对位姿关系的标定方法,在阐述其原理的基础上通过仿真标定与实际标定实验来验证其可行性.
1一基于双平面靶标的两相机间相对位姿关系的标定方法
1.1原理
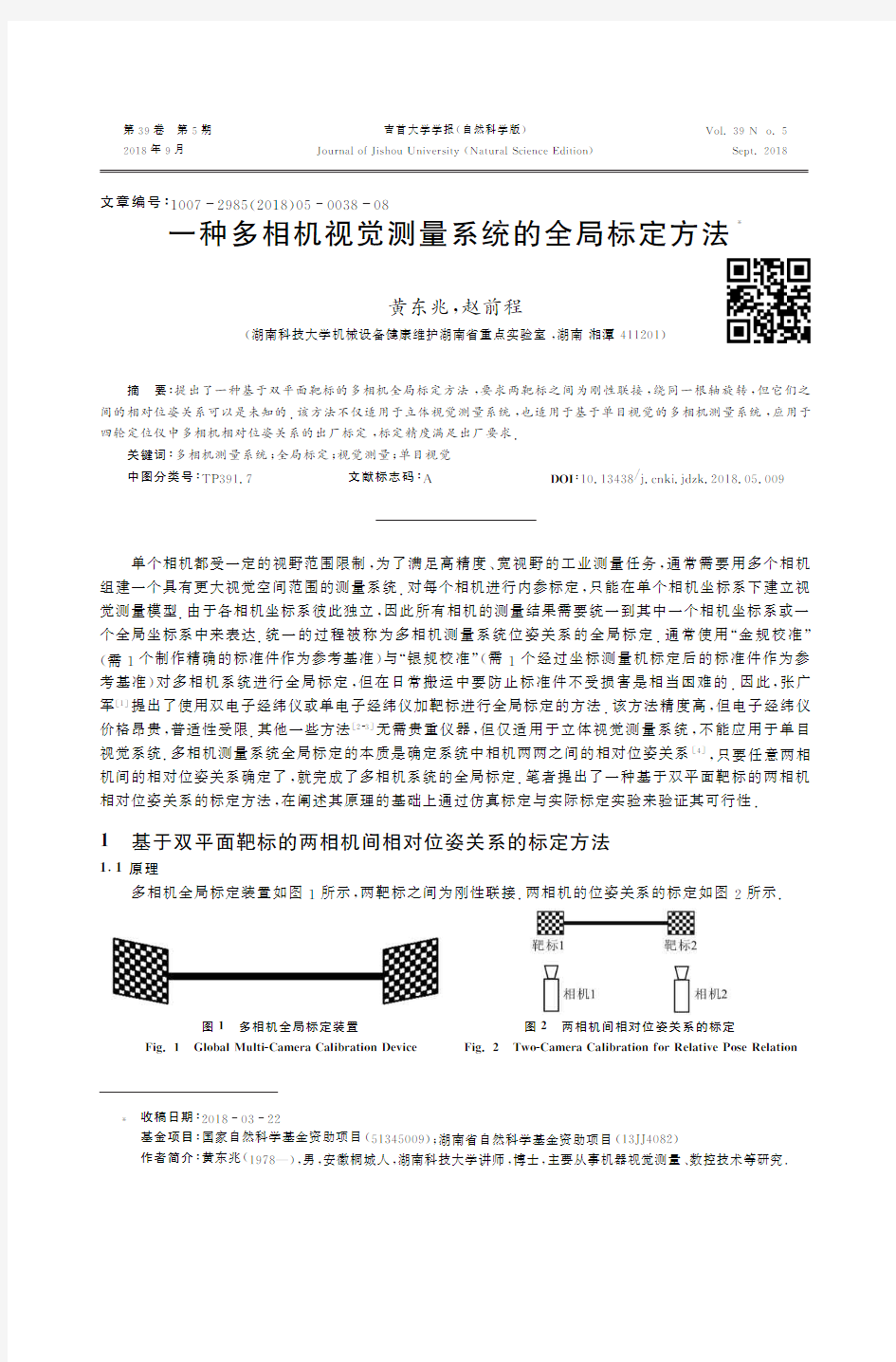
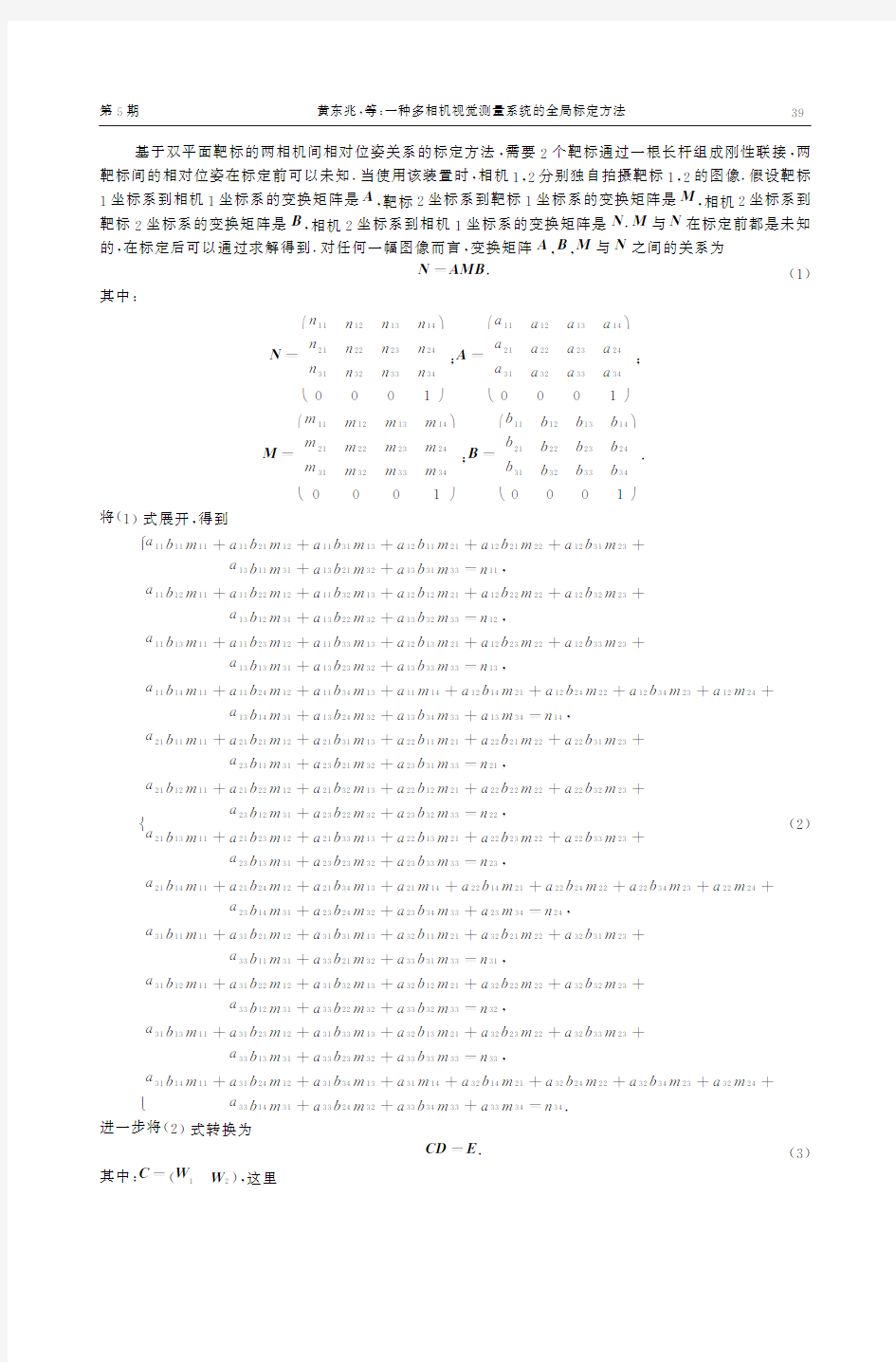
多相机全局标定装置如图1所示,两靶标之间为刚性联接.两相机的位姿关系的标定如图2所示.
图1一多相机全局标定装置
F i g.1一
G l o b a lM u l t i-C a m e r aC a l i b r a t i o nD e v i c e
图2一两相机间相对位姿关系的标定
F i g.2一T w o-C a m e r aC a l i b r a t i o n f o rR e l a t i v eP o s eR e l a t i o n
?收稿日期:20180322
基金项目:国家自然科学基金资助项目(51345009);湖南省自然科学基金资助项目(13J J4082)
作者简介:黄东兆(1978 ),男,安徽桐城人,湖南科技大学讲师,博士,主要从事机器视觉测量二数控技术等研究.
基于OpenCV的CCD摄像机标定方法_雷铭哲_孙少杰_陈晋良_陶磊_魏坤
MethodofCCDCameraCalibrationBasedOnOpenCV LEIMing-zhe1,SUNShao-jie2,CHENJin-liang1,TAOLei1,WEIKun1 (1.North Automation Control Technology Institute ,Taiyuan 030006,China ; 2.Navy Submarine Academy ,Qingdao 266042,China )Abstract: Computervisionhasbeenwidelyusedinindustry,agriculture,military,transportationareaandsoon.Cameracalibrationisveryimportantandalsothekeyresearchfieldofvisionsystem.ThispapermainlyresearchesonthemethodofCCDcameracalibration,thepin-holemodelhasbeenintroducedandappliedinprocessofcalibration.Specially,inordertoimprovetheaccuracy,bothradialandtangentiallensdistortionhavebeentakenintoaccountduringtheimplementofcalibrationbasedonOpenCV.Thiskindofarithmetichaspracticalvalueontheapplicationdesignofimageprocessingandcomputervision,andexperimentresultsshowgoodprecision,whichcanmeettheapplicationneedofvisualinspectionorothervisionsystemswell. Keywords: pin-holemodel,cameracalibration,lensdistortion,OpenCV摘要: 计算机视觉在工业,农业,军事,交通等领域都有着广泛应用。摄像机标定是视觉系统的重要环节,也是研究的关键领域。以摄像机标定技术为研究对象,选取针孔成像模型,简述了世界坐标系、摄像机坐标系和图像坐标系及其相互间的位置关系,对标定过程进行了深入研究。特别地,为提高标定精度,充分考虑了透镜径向和切向畸变影响及其求解方法,制作了棋盘格平面标定模板,基于开放计算机视觉函数库(OpenCV)实现了摄像机标定。该标定算法能够充分发挥OpenCV函数库功能,对于图像处理与计算机视觉方面的应用设计具有实用价值。实验结果表明该方法取得了较高精度,能够满足视觉检测或其他计算机视觉系统的应用需要。 关键词:针孔模型,摄像机标定,透镜畸变,OpenCV中图分类号:S219 文献标识码:A 基于OpenCV的CCD摄像机标定方法 雷铭哲1,孙少杰2,陈晋良1,陶 磊1,魏坤1 (1.北方自动控制技术研究所,太原030006;2.海军潜艇学院,山东青岛266042 )文章编号:1002-0640(2014) 增刊-0049-03Vol.39,Supplement Jul,2014 火力与指挥控制 FireControl&CommandControl第39卷增刊 引言 摄像机标定是计算机视觉系统的前提和基础,其目的是 确定摄像机内部的几何和光学特性(内部参数)以及摄像机 在三维世界中的坐标关系(外部系数) [1] 。考虑到摄像机标定在理论和实践应用中的重要价值,学术界近年来进行了广泛的研究。 摄像机标定方法可以分为线性标定和非线性标定,前者简单快速,精度低,不考虑镜头畸变;后者由于引入畸变参数而使精度提高,但计算繁琐,速度慢,对初值选择和噪声敏感。本文将两者结合起来,采用由粗到精策略,以实现精确标定。 1摄像机模型 本文选取摄像机模型中常用的针孔模型[2-3],分别建立三维世界坐标系(O w X w Y w Z w ),摄像机坐标系(O c X c Y c Z c )及图像平面坐标系(O 1xy ) 如下页图1所示。其中摄像机坐标系原点O c 为摄像机光心,Z c 轴与光轴重合且与图像平面垂直,O c O 1为摄像机焦距f 。图像坐标系原点O 1为光轴与图像平面的交点,x ,y 轴分别平行于摄像机坐标系X c 、Y c 轴。设世界坐标系中物点P 的三维坐标为(X w ,Y w ,Z w ),它在理想的针孔成像模型下图像坐标为P (X u ,Y u ),但由于透镜畸变引起偏离[4-5],其实际图像坐标为P (X d ,Y d )。图像收稿日期:2013-09-20修回日期:2013-11-10 作者简介:雷铭哲(1977-),男,湖北咸宁人,硕士。研究方向:故障诊断系统。 49··
机器视觉测量技术
机器视觉测量技术杨永跃合肥工业大学 2007.3 目录 第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD 相机类 2.4 彩色数码相机 2.5 常用的图像文件格式
2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像 2 5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从 x 恢复形状的方法 5.6 测距成像
第六章标定 6.1 传统标定 6.2 Tsais 万能摄像机标定法 6.3 Weng ’ s 标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术第八章图像测量软件 (多媒体介绍 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
3 第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性, 因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、 X 射线、 CCD 、数字扫描仪、超声成像、 CT 等 数字化设备 2 低层视觉(预处理 :对输入的原始图像进行处理(滤波、增强、边缘检测 ,提取角点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理分析。系统标定
摄像机标定方法综述
摄像机标定方法综述 摘要:首先根据不同的分类方法对对摄像机标定方法进行分类,并对传统摄像机标定方法、摄像机自标定方法等各种方法进行了优缺点对比,最后就如何提高摄像机标定精度提出几种可行性方法。 关键字:摄像机标定,传统标定法,自标定法,主动视觉 引言 计算机视觉的研究目标是使计算机能通过二维图像认知三维环境,并从中获取需要的信息用于重建和识别物体。摄像机便是3D 空间和2D 图像之间的一种映射,其中两空间之间的相互关系是由摄像机的几何模型决定的,即通常所称的摄像机参数,是表征摄像机映射的具体性质的矩阵。求解这些参数的过程被称为摄像机标定[1]。近20 多年,摄像机标定已成为计算机视觉领域的研究热点之一,目前已广泛应用于三维测量、三维物体重建、机器导航、视觉监控、物体识别、工业检测、生物医学等诸多领域。 从定义上看,摄像机标定实质上是确定摄像机内外参数的一个过程,其中内部参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标、焦距、比例因子和镜头畸变等;而外部参数的标定是指确定摄像机坐标系相对于某一世界坐标系的三维位置和方向关系,可用3 ×3 的旋转矩阵R 和一个平移向量t 来表示。 摄像机标定起源于早前摄影测量中的镜头校正,对镜头校正的研究在十九世纪就已出现,二战后镜头校正成为研究的热点问题,一是因为二战中使用大量飞机,在作战考察中要进行大量的地图测绘和航空摄影,二是为满足三维测量需要立体测绘仪器开始出现,为了保证测量结果的精度足够高,就必须首先对校正相机镜头。在这期间,一些镜头像差的表达式陆续提出并被普遍认同和采用,建立起了较多的镜头像差模型,D.C.Brown等对此作出了较大贡献,包括推导了近焦距情况下给定位置处径向畸变的表达式及证明了近焦距情况下测得镜头两个位置处的径向畸变情况就可求得任意位置的径向畸变等[2]。这些径向与切向像差表达式正是后来各种摄像机标定非线性模型的基础。随着CCD器件的发展,现有的数码摄像机逐渐代替原有的照相机,同时随着像素等数字化概念的出现,在实际应用中,在参数表达式上采用这样的相对量单位会显得更加方便,摄像机标定一词也就代替了最初的镜头校正。
三维重建综述
三维重建综述 三维重建方法大致分为两个部分1、基于结构光的(如杨宇师兄做的)2、基于图片的。这里主要对基于图片的三维重建的发展做一下总结。 基于图片的三维重建方法: 基于图片的三维重建方法又分为双目立体视觉;单目立体视觉。 A双目立体视觉: 这种方法使用两台摄像机从两个(通常是左右平行对齐的,也可以是上下竖直对齐的)视点观测同一物体,获取在物体不同视角下的感知图像,通过三角测量的方法将匹配点的视差信息转换为深度,一般的双目视觉方法都是利用对极几何将问题变换到欧式几何条件下,然后再使用三角测量的方法估计深度信息这种方法可以大致分为图像获取、摄像机标定、特征提取与匹配、摄像机校正、立体匹配和三维建模六个步骤。王涛的毕业论文就是做的这方面的工作。双目立体视觉法的优点是方法成熟,能够稳定地获得较好的重建效果,实际应用情况优于其他基于视觉的三维重建方法,也逐渐出现在一部分商业化产品上;不足的是运算量仍然偏大,而且在基线距离较大的情况下重建效果明显降低。 代表文章:AKIMOIO T Automatic creation of3D facial models1993 CHEN C L Visual binocular vison systems to solid model reconstruction 2007 B基于单目视觉的三维重建方法: 单目视觉方法是指使用一台摄像机进行三维重建的方法所使用的图像可以是单视点的单幅或多幅图像,也可以是多视点的多幅图像前者主要通过图像的二维特征推导出深度信息,这些二维特征包括明暗度、纹理、焦点、轮廓等,因此也被统称为恢复形状法(shape from X) 1、明暗度(shape from shading SFS) 通过分析图像中的明暗度信息,运用反射光照模型,恢复出物体表面法向量信息进行三维重建。SFS方法还要基于三个假设a、反射模型为朗伯特模型,即从各个角度观察,同一点的明暗度都相同的;b、光源为无限远处点光源;c、成像关系为正交投影。 提出:Horn shape from shading:a method for obtaining the shape of a smooth opaque object from one view1970(该篇文章被引用了376次) 发展:Vogel2008年提出了非朗伯特的SFS模型。 优势:可以从单幅图片中恢复出较精确的三维模型。 缺点:重建单纯依赖数学运算,由于对光照条件要求比较苛刻,需要精确知道光源的位置及方向等信息,使得明暗度法很难应用在室外场景等光线情况复杂的三维重建上。 2、光度立体视觉(photometric stereo) 该方法通过多个不共线的光源获得物体的多幅图像,再将不同图像的亮度方程联立,求解出物体表面法向量的方向,最终实现物体形状的恢复。 提出:Woodham对SFS进行改进(1980年):photometric method for determining surface orientation from multiple images(该文章被引用了891次) 发展:Noakes:非线性与噪声减除2003年; Horocitz:梯度场合控制点2004年; Tang:可信度传递与马尔科夫随机场2005年; Basri:光源条件未知情况下的三维重建2007年; Sun:非朗伯特2007年; Hernandez:彩色光线进行重建方法2007年;
图形创意设计的视觉理念.
大众文艺 大论文出自浙江农林大学科研课题,项目编号:2351000376我们正生活在一个资讯高度发达的时代,如何成为观者在茫茫讯息中锁定的焦点?怎样的设计作品才是具有了备受关注的超凡气质?王受之先生在他的《世界现代设计史》一书中首先提到“所谓设计,指的是把一种设计、规划、设想、问题解决的方法,通过视觉的方式传达出来的活动过程”。那么图形创意设计的视觉传达根植于何处呢?图像的视觉理念是什么呢? 图形作为视觉注目的中心,图形创意的优劣直接影响到观者的注目程度,好的图形不仅要在强烈的视觉冲击下,抓住观者的视线,作品还应该是洋溢着一种吸引人去分析的美丽——富有创意、简洁又充满着哲理,这样的作品才能够历久弥新。 一、图形的创意性 生活处处离不开创意,没有创意的生活是灰色的,死板而又毫无生机可言的。那么创意来源于哪里呢?创意来源于对生活敏锐的观察,创意来源于我们的新奇的想象,来源于一种非常规的思维。譬如:很多事物,在我们眼中是司空见惯的,但在孩子的 眼中是新奇的,因为孩子的思维没有太多的定式,对一切都充满了好奇,他们的思维宛若神来之笔,随心描绘。记得儿子第一次做电动自行车的经历,他说“车子前面好像装了一个电风扇”, 还记得哪本书看到的一个孩子形容马路上车多时说“马路上的车
像箭一样向我射过来”。这种没有被生活模式化的思维就是一种创造,发现就是创造。罗丹说过“生活中不是缺少美,而是缺少发现美的眼睛”。我们需要做的是去发现美,发现不同于以往的美,暂时丢掉那些固守的思维,打破常规,如孩童一样,始终保持一颗新奇而敏感的心,去重新观察,确立崭新的视角,会发现事物的多种角度和样貌是我们所不曾知道的,从而展开丰富的创想,创造出独特而新奇的视觉形象。 对于图形创意设计而言,就是围绕主题所展开的一种开放式的思维创意,它绝不是一种现实的简单再现,一如鲁道夫?阿恩海姆在他的《艺术与视知觉》中阐述的一样“视觉形象永远不是对于感性材料的机械复制,而是对现实的一种创造性的把握。它把握的形象是含有丰富的想象性、创造性、敏锐性的美的形象。观看世界的活动被证明是外部客观事物本身的性质与观看的本性之间的相互作用。”所以无论是运用头脑风暴,还是由感知形象及各部分感官对世界的认知而引发的形象联想;由经验的积累、沉淀所迸发出来的具有潜意识的、非逻辑的、快速的直觉思维, 还是由理性推理而衍生的逻辑思维,它无疑是拓展了主题的表现和表达的广度和深度,再经过头脑的综合分析、提取、分解和整合,创造出又“新”又“奇”,并且富有个性,又与众不同的视觉形象,又加之独特的表现手法,别出心裁的视觉感受,这样的图形才更具有吸引力,更可以达成深度传播的目的。 创意的灵感和风格并非灵感乍现,难以捉摸,它是可以捕捉的,有很多的方法可以遵循,例如形象联想、意向联想、异影图形、正负形、剪缺图形、同构图形、混维图形等,都可以成为不朽创意的方法来源,如绝对伏特加酒的创意,堪称完美,再如福田繁雄的领带,幽默风趣,出神入化,但是无论运用怎样的方法去创作,它的差异都来自于设计师的自身的差异,是设计师综合素质的体现。 二、图形的寓意性 “言有尽,意无穷”的境界,也是图形创意所追求的,除了主题意识表达的准确外,图形还应该是富有寓意、耐人寻味的。过于直白的图形设计不仅乏味无法达到传播的目的,也是对于观者智慧的一种忽视。芬兰的设计师博凯伶,作品以简洁、强烈和尖锐而著称,他曾经这样说过“什么是好?好的海报应该把观众当作有智慧的人来
机器视觉测量技术1.
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
双目视觉成像原理
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。 2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、 右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L 和C R 上的像点 分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。 图1:立体视觉系统 3.双目立体视觉相关基本理论说明
3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目立体成像原 理图,两摄像机的投影中心的连线的距离,即基线距为b 。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f 处,这个虚拟的图像平面坐标系O1uv 的u 轴和v 轴与和摄像机坐标系的x 轴和y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P 在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P 图像坐标的Y 坐标相同,即v1=v2。由三角几何关系得到: c c 1z x f u = c c 2z )b -x (f u = v 1 c c 21z y f v v == 上式中(x c ,y c ,z c )为点P 在左摄像机坐标系中的坐标,b 为基线距,f 为两个摄 像机的焦距,(u1,v1)和(u2,v2)分别为点P 在左图像和右图像中的坐标。 视差定义为某一点在两幅图像中相应点的位置差: 图2:双目立体成像原理图 由此可计算出空间中某点P 在左摄像机坐标系中的坐标为: 因此,只要能够找到空间中某点在左右两个摄像机像面上的相应点,并且通过摄像机标定获得摄像机的内外参数,就可以确定这个点的三维坐标。 双目立体视觉的系统结构以及精度分析 由上述双目视觉系统的基本原理可知,为了获得三维空间中某点的三维坐标,需要在
文献综述
文献综述 前言 近年来,除测绘领域之外,其他行业如机械制造、建筑、医学等,对近景摄影测量技术的需求也越来越大,传统的量测相机显然已经无法满足其要求,而越来越普及的非量测相机正好可以填补这个空缺,利用非量测相机进行摄影测量具有非常远大的应用前景。非量测相机在影像获取方面具有使用简单方便、价格合理,作业效率高、适应性强等优点,但是非量测相机的主距f和像主点在像平面坐标系中的坐标(x0,y0)都是未知的,并且非量测相机存在较大的镜头畸变,因此必须先对其进行检校,然后才能进行后续的像点量测和数据处理。 所谓的相机检校是指借助于像平面上一些点在物方坐标系中的坐标,确定照相机的内、外参数,得到有效的成像模型,以达到在像平面上像素点与三维空间中的点之间建立映射的目的。广义上讲,近景摄影机检校的内容包括: 1.主点位置(x0,y0)与主距(f)的测定; 2.光学畸变系数的测定; 3.压平装置以及像框坐标系的设定; 4.调焦后主距变化的测定与设定; 5.调焦后畸变差变化的测定; 6.摄影机偏心常数的测定; 7.立体摄影机(及立体视觉系统)内方位元素与外方位元素的测定;
8.多台摄影机同步精度的测定。 对于一般相机检校任务,我们主要测定相机的内方位元素(x0,y0,f)和镜头畸变差参数(k1,k2,p1,p2),其主要的检校方法大体可以分为:光学实验室检校(Optical Laboratory Calibration)法;实验场检校(Test Range Calibration)法;作业检校(On the Job Calibration)法;自检校(Self Calibration)法;恒星检校(Stellar Calibration)法。 其中,适用于非量测相机检校的作业检校法是一种在完成某个近景测量任务中同时对相机进行检校的方法。此方法依据物方空间分布合理的一群高质量控制点,在解求待定点物方空间坐标的任务中,同时解求像片内外方位元素、物镜畸变系数。基于直接线性变换(DLT)的相机检校法,也属作业检校法的一种。 直接线性变换(direct linear t ransformation ,简称DL T) 是建立像点坐标和物点坐标直接线性关系的算法。处理时不需要相机内外方位元素的初始值,因而在近景摄影测量中被广泛应用。目前市场上,利用DLT方法进行相机检校的算法,多是在有3维控制信息的情况下,采 用3维DLT方法进行检校较多,而采用2维DLT方法的较少。利用3维控制场进行相机检校,程序虽简单,但高精度3维控制场的建立比较困难。廉价数码相机的广泛应用,促使简便、高精度的检校方法成为近年来研究的主要方向。随着摄影测量和计算机视觉理论的发展,许多学者对相机检校技术进行了深入的研究,检校用的控制场也由3维向2维转变。基于2维DLT相机标定算法的研究已成为近几年相机标定研究的热点。
【CN110033491A】一种相机标定方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910299209.5 (22)申请日 2019.04.15 (71)申请人 南京工程学院 地址 211167 江苏省南京市江宁科学园弘 景大道1号 (72)发明人 郝飞 王宗荣 史晶晶 王帆 陈德林 胡运涛 汪海洋 张汝祥 (74)专利代理机构 南京纵横知识产权代理有限 公司 32224 代理人 董建林 范青青 (51)Int.Cl. G06T 7/80(2017.01) (54)发明名称一种相机标定方法(57)摘要本发明公开了相机标定技术领域的一种相机标定方法。旨在解决现有技术中基于一维标定杆标定精度较低,基于三维标定模板标定存在自遮挡问题,基于棋盘格形二维标定模板标定需进行角点检测而无法获取更高的标定精度,基于单个圆形图案作为特征的二维标定模板标定存在“原理性误差”。所述方法包括如下步骤:根据预制的标定模板采集标定模板图像;提取标定模板图像中的特征点,求解相机内参数及镜头畸变参数;根据相机内参数和镜头畸变参数构建多维向量;利用镜头畸变参数对所述标定模板图像进行去畸变处理并构建新的多维变量,直至相邻两次多维变量的欧式距离小于设定值,输出最后一次 相机内参数及畸变参数。权利要求书1页 说明书6页 附图5页CN 110033491 A 2019.07.19 C N 110033491 A
权 利 要 求 书1/1页CN 110033491 A 1.一种相机标定方法,其特征在于,所述方法包括如下步骤: 将预制的标定模板置于待标定相机的视场内,采集标定模板图像;所述标定模板为二维标定模板,标定模板上分布有多个圆形,多个圆形以标定模板的中心点为环心围成多个直径不同的环形阵列; 提取标定模板图像中圆形的特征点,求解相机内参数及镜头畸变参数;所述特征点为圆形的圆心; 根据相机内参数和镜头畸变参数构建多维向量; 利用镜头畸变参数对所述标定模板图像进行去畸变处理,重复相机内参数及畸变参数的求解过程,并构建新的多维变量,直至相邻两次多维变量的欧式距离小于设定值,输出最后一次相机内参数及畸变参数。 2.根据权利要求1所述的相机标定方法,其特征在于,所述特征点的提取方法包括: 对标定模板图像中的圆形进行边缘检测,利用最小二乘法拟合圆环透视投影后产生的两个椭圆; 连接两个椭圆圆心的直线与每个椭圆形成两个交点,采用交比不变原理求解特征点像点的像素坐标。 3.根据权利要求2所述的相机标定方法,其特征在于,所述特征点的提取方法还包括:对标定模板图像进行预处理,所述预处理包括灰度化处理和或滤波处理。 4.根据权利要求1所述的相机标定方法,其特征在于,所述相机内参数包括:主点坐标的两个分量、横向和纵向缩放因子; 所述相机内参数的求解方法包括: 在标定模板图像上标定四个圆形的特征点,利用四个特征点之间的几何约束和定量关系建立关于相机内参数的四元方程组,所述方程组为无约束非线性方程组; 求解无约束非线性方程组,得到相机内参数。 5.根据权利要求1所述的相机标定方法,其特征在于,所述求解镜头两个畸变参数包括如下步骤: 标定一组特征,所述特征包括标定模板图像中满足调和共轭的三个特征点和一个无穷远点; 根据调和比建立关于两个畸变参数的超定方程组; 运用最小二乘法求解超定方程组,得到镜头两个畸变参数。 6.根据权利要求1至中5任一项所述的相机标定方法,其特征在于,所述设定值≤10-5。 2
机器视觉中的摄像机定标方法综述
机器视觉中的摄像机定标方法综述 吴文琪,孙增圻 (清华大学计算机系智能技术与系统国家重点实验室,北京100084) 摘要:回顾了机器视觉中的各种摄像机定标方法,对各种方法进行介绍、分析,并提出了定标方法的发展方向的新思路。 关键词:机器视觉;摄像机定标;三维重建;镜头畸变 中国法分类号:TP387文献标识码:A文章编号:1001-3695(2004)02-0004-03 Overvie w of Camera Calibration Methods for Machine Vision WU Wen-qi,SUN Zeng-qi (State Key L aborato ry o f Intellige nt Tec hnology&Syste ms,Dept.o f Co mpute r Science&Technology,Tsinghua Universit y,Bei jing100084,China) Abstract:In this paper,themethods for camera calibration are reviewed,anal yzed and compared.Furthermore,the develop ment of the camera calibration is discussed. Key w ords:Machine Vision;Camera Calibration;3D Reconstruction;Lens Distortion 1引言 在机器视觉的应用中,如基于地图生成的视觉、移动机器人的自定位、视觉伺服等的应用中,从二维图像信息推知三维世界物体的位姿信息是很重要的。目前已经出现了一些自定标和免定标的方法,这些方法在比较灵活的同时,尚不成熟[1],难以获得可靠的结果。通过摄像机的定标重建目标物三维世界目标物体仍然是重要的方法。 摄像机定标在机器视觉中决定: (1)内部参数给出摄像机的光学和几何学特性% %%焦距,比例因子和镜头畸变。 (2)外部参数给出摄像机坐标相对于世界坐标系的位置和方向,如旋转和平移。 在机器人的视觉应用中,目标物位姿信息获取通常有一定的精度要求,机器人视觉系统的性能很大程度上依赖于定标精度。 随着计算机性能的快速提高,低价位CCD摄像机的大量使用,计算机定标方法也得到了不断的改进。 2摄像机模型 摄像机的投影几何模型可以看作这样一个过程,把三维世界透视投影到一个球面(视球),然后把球面上影像投射到一个平面P,理想情况下,平面P关于光轴中心对称。从图像中心点出发到投射平面点的距离r(A)与光轴夹角A的关系有五种模型,每种都有其自己有用的特性[2]。 其成像简图如图1所示。 图1成像简图 2.1透视模型 透视模型公式为 r(A)=k tan A 理想状况下可以等价为小孔成像。许多最近的算法和判断不同算法的优劣的依据都是基于这个假设。但是,透视投影只是表示了视球的前半部。要是不在光轴的附近,物体的形状和密度都会发生畸变。这种模型符合人的视觉感受,理想情况下,直线投影仍为直线。透视模型在定标方法中被广泛采用,在视角不大的镜头情况下比较符合实际情况。 在视角比较大时,透视模型通过对镜头畸变进行校正来修正模型。根据镜头光学成像原理,畸变的模型为D x (x,y)=k1x(x2+y2)+(p1(3x2+y2)+2p2xy)+s1(x2+y2) D y (x,y)=k2x(x2+y2)+(p2(3x2+y2)+2p1xy)+s2(x2+y2) 式中,D x,D y是非线性畸变值,D x,D y的第一项称为径向畸 # 4 #计算机应用研究2004年 收稿日期:2002-11-18;修返日期:2003-03-22
视觉设计总监职责_视觉设计总监工作内容
视觉设计总监职责_视觉设计总监工作内容 视觉设计总监职责1 1、负责公司店铺整体形象的创意设计,把握店铺的整体风格和视觉呈现,全面提升网站的整体视觉效果; 2、配合运营和项目负责人实现各种视觉效果的呈现 3、根据运营推广方案更新优化店铺图片,并配合店铺活动及促销方案优化产品页面; 4、带过团队,善于沟通,懂得如何有效合理分工,增强团队凝聚力 5、管理美工团队,负责团队成员能力的培养及整个设计团队水平的提升; 视觉设计总监职责2 1、主要对接抖音及短视频产品的站内活动设计需求,完成设计需求; 2、负责运营设计团队的管理及产出质量的把控和提升; 3、要有较强的个人能力,有能力独立高水准完成大型的站内活动需求,追求设计的细节; 4、探讨适合业务的视觉调性、表现方法和视觉趋势,制定设计规范; 5、对设计抱有创作热情,并且能找到设计中的平衡点,具备成熟的设计观;
6、要求单兵作战能力强,更有丰富带队经验。 视觉设计总监职责3 1、负责公司整体形象设计,品牌网站及各个平台的页面设 计及品牌的整体视觉风格和规范,把握所有输出视觉的整体风 格和视觉形象,全面提升公司整体视觉效果; 2、负责公司各类宣传推广的广告创意及视觉设计(包括视觉、网页、广告、手册、品牌艺术表现等方面)的基调和表现形式,达到公司要求的营销与传播效果; 3、能精准的找寻产品卖点,生成图文并茂、有美感、吸引 购买力的设计,对自身作品有高的要求; 4、负责视觉团队培训、考核等团队日常工作管理,充分调 动团队的__意能力及创意效率; 视觉设计总监职责4 1、解读品牌调性,梳理文案逻辑,根据需求确定店铺各类 设计方向; 2、参与产品前期界面视觉风格研究、设计流行趋势分析, 协同部门完成产品创意制作; 3、负责线上平台的设计、协助改版和更新,包括界面设计、编辑和美化等; 4、积极融入团队,主动提升专业,主动配合领导完成各项 工作; 视觉设计总监职责5
视觉创意表达和图形创意练习 -
《视觉创意表达》教案 课题名称:第一章视觉创意表达的基本概念 课题内容:1. 1视觉创意的思维方式 课题时间:2课时 一、视觉创意表达的概念: 视觉创意表达是把一种计划、规划、设想通过视觉的形式传达出来的活动过程。(等同于设计,把创意也就是计划、规划、设想—信息用视觉的语言表达出来的活动)。 到底什么是设计?怎样去设计?打个比方,这里有一个杯子。如果有人对你说:“请设计一下这个杯子吧”。你该怎么办呢?即使你知道这个杯子是你的设计对象,但是你也会感觉不知道怎样去设计它进而发现自己越来越不认识这个杯子了。 如果我们从杯子再扩展到盘子,把十几种同样是玻璃器皿却具有微妙差别的容器摆在你的面前,让你去界定哪些是杯子,哪些是盘子时,你又该如何去确定那个分界线呢? 如此这般,你就会感到对杯子更加不了解了。其实这种情况并不能说明你对杯子的认识有所倒退,相反,因为你不再是毫无意识的将此物品定义为杯子,而是进行了更深层次的思考,你对这个杯子有了更深层次的感受。 将已知的事物陌生化,然后在思考其深层次的真实本质,才能找到设计的突破口,就以杯子而言,材质是玻璃的,玻璃有什么样的特点?,如果是透明的,可不可以改一下颜色,可不可以换成不同的材质,可不可以设计一款不同的造型,换一个不同的图案或者将之变为一个功能多的杯子?或者你还能挖掘出更深的含义。 让我们轻轻地将手肘撑在桌子上,托着脸来看这个世界,眼前的一切似乎也会随之不同。我们观看世界的视角和感受世界的方法可能有千万种,只要能够下意识的将这些角度和感受的方法运用到日常生活中,就是设计。 (一)创意的思维方式(设计的关键:设计中的设计) 创意是什么?创意是传统的叛逆;是打破常规的哲学;是破旧立新;是超越自我,超越常规的导引; 形成创意的思维方式 ⑴水平思考法 水平思维就是在解决问题时广泛涉猎不同领域进行横向思考,充分利用各种外部信息以获得答案。可以锻炼思维的广阔性、灵活性和创造性。对于一个主题
单目视觉图像深度测量方法研究
单目视觉图像深度测量方法研究 相机与其它传感器相比,具有能够直观反映客观世界、数据量大、信息丰富等特点,而且通常价格较低、配置方便,是自动化装置和机器人感知环境传感器中的优先选择之一。但由于普通相机在拍摄时获得的是被拍摄场景投影到成像平面上的二维图像,丢失了场景的深度信息,这使得机器无法通过图像直接得到场景中物体的远近、大小和运动速度等信息,因此需要从二维图像中恢复深度信息,即深度测量。深度测量在工业自动化、智能机器人、目标检测和跟踪、智能交通、三维建模和3D视频制作等领域都有广泛的应用。深度测量方法有很多种,其中基于单目视觉的图像深度测量方法具有设备简单、成本低廉、操作方便等特点而成为研究热点,并且单目相机体积小,重量轻,在一些有空间大小或载荷限制的特定场合以及手眼系统等应用中,需要或只能使用基于单目视觉的图像深度测量方法,而目前该测量方法还很不成熟,有必要对其计算原理、技术方法等方面进行研究。 因此本文对基于单目视觉的图像深度测量方法开展研究,主要工作和创新点如下:(1)提出一种基于熵和加权Hu氏不变矩的目标物体绝对深度的测量方法。该方法用普通单目相机拍摄同一场景的两幅图像,拍摄时保持相机的参数不变,将相机沿光轴方向移动,分别在物距间隔为d的前后两处各拍摄一幅图像,然后采用LBF模型的方法分割出图像中的物体,并求出各个目标物体像的面积,再将物体像的熵的相对变化率和加权Hu氏不变矩结合起来实现图像内物体的自动匹配,最后运用本文推导的公式计算出各个目标物体的绝对深度。文中采用真实场景图像对该方法进行了实验验证并与其他方法进行了对比,结果表明了该方法的有效性。(2)提出一种基于SIFT特征的目标物体绝对深度的测量方法,该方法同样需要按照上面的方法获取同一场景的两幅图像,然后分别对这两幅图像进行图像分割和SIFT特征点提取,并进行图像中的目标物体匹配,接着用凸包和几何形状约束从匹配物体中选出一对最佳直线段,最后根据光学成像原理利用直线段长度计算出场景中静态目标物体的绝对深度信息。 由于是通过被测量物体上的两个SIFT特征点所成的直线段长度来计算出物体的绝对深度信息的,所以该方法鲁棒性较好,不受场景中被测量目标物体部分遮挡或缺失的限制,对比实验表明该方法测量精度高于现有其他方法。(3)提出一种基于梯度信息和小波分析的单幅图像相对深度测量方法。该方法首先利用图像
基于OpenCV的摄像机标定的应用研究
38562009,30(16)计算机工程与设计Computer Engineering and Design 0引言 机器视觉的基本任务之一是从摄像机获取的图像信息出发计算三维空间中物体的几何信息,并由此重建和识别物体,而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到,这个过程称为摄像机标定(或定标)。标定过程就是确定摄像机的几何和光学参数,摄像机相对于世界坐标系的方位。标定精度的大小,直接影响着机器视觉的精度。迄今为止,对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决[1-5]。对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。 OpenCV是Intel公司资助的开源计算机视觉(open source computer vision)库,由一系列C函数和少量C++类构成,可实现图像处理和计算机视觉方面的很多通用算法。OpenCV有以下特点: (1)开放C源码; (2)基于Intel处理器指令集开发的优化代码; (3)统一的结构和功能定义; (4)强大的图像和矩阵运算能力; (5)方便灵活的用户接口; (6)同时支持Windows和Linux平台。 作为一个基本的计算机视觉、图像处理和模式识别的开源项目,OpenCV可以直接应用于很多领域,是二次开发的理想工具。目前,OpenCV的最新版本是2006年发布的OpenCV 1.0版,它加入了对GCC4.X和Visual https://www.360docs.net/doc/6a15384808.html,2005的支持。 1摄像机标定原理 1.1世界、摄像机与图像坐标系 摄像机标定中有3个不同层次的坐标系统:世界坐标系、摄像机坐标系和图像坐标系(图像像素坐标系和图像物理坐标系)。 如图1所示,在图像上定义直角坐标系 开发与应用
一种多相机视觉测量系统的全局标定方法
一一第39卷一第5期一吉首大学学报(自然科学版)V o l.39一N o.5一一一一2018年9月J o u r n a l o f J i s h o uU n i v e r s i t y(N a t u r a l S c i e n c eE d i t i o n)S e p t.2018一一 文章编号:10072985(2018)05003808 一种多相机视觉测量系统的全局标定方法? 黄东兆,赵前程 (湖南科技大学机械设备健康维护湖南省重点实验室,湖南湘潭411201) 一一摘一要:提出了一种基于双平面靶标的多相机全局标定方法,要求两靶标之间为刚性联接,绕同一根轴旋转,但它们之间的相对位姿关系可以是未知的.该方法不仅适用于立体视觉测量系统,也适用于基于单目视觉的多相机测量系统,应用于四轮定位仪中多相机相对位姿关系的出厂标定,标定精度满足出厂要求. 关键词:多相机测量系统;全局标定;视觉测量;单目视觉 中图分类号:T P391.7一一一一一一一文献标志码:A D O I:10.13438/j.c n k i.j d z k.2018.05.009 单个相机都受一定的视野范围限制,为了满足高精度二宽视野的工业测量任务,通常需要用多个相机组建一个具有更大视觉空间范围的测量系统.对每个相机进行内参标定,只能在单个相机坐标系下建立视觉测量模型.由于各相机坐标系彼此独立,因此所有相机的测量结果需要统一到其中一个相机坐标系或一个全局坐标系中来表达.统一的过程被称为多相机测量系统位姿关系的全局标定.通常使用 金规校准 (需1个制作精确的标准件作为参考基准)与 银规校准 (需1个经过坐标测量机标定后的标准件作为参考基准)对多相机系统进行全局标定,但在日常搬运中要防止标准件不受损害是相当困难的.因此,张广军[1]提出了使用双电子经纬仪或单电子经纬仪加靶标进行全局标定的方法.该方法精度高,但电子经纬仪价格昂贵,普适性受限.其他一些方法[23]无需贵重仪器,但仅适用于立体视觉测量系统,不能应用于单目视觉系统.多相机测量系统全局标定的本质是确定系统中相机两两之间的相对位姿关系[4],只要任意两相机间的相对位姿关系确定了,就完成了多相机系统的全局标定.笔者提出了一种基于双平面靶标的两相机相对位姿关系的标定方法,在阐述其原理的基础上通过仿真标定与实际标定实验来验证其可行性. 1一基于双平面靶标的两相机间相对位姿关系的标定方法 1.1原理 多相机全局标定装置如图1所示,两靶标之间为刚性联接.两相机的位姿关系的标定如图2所示. 图1一多相机全局标定装置 F i g.1一 G l o b a lM u l t i-C a m e r aC a l i b r a t i o nD e v i c e 图2一两相机间相对位姿关系的标定 F i g.2一T w o-C a m e r aC a l i b r a t i o n f o rR e l a t i v eP o s eR e l a t i o n ?收稿日期:20180322 基金项目:国家自然科学基金资助项目(51345009);湖南省自然科学基金资助项目(13J J4082) 作者简介:黄东兆(1978 ),男,安徽桐城人,湖南科技大学讲师,博士,主要从事机器视觉测量二数控技术等研究.