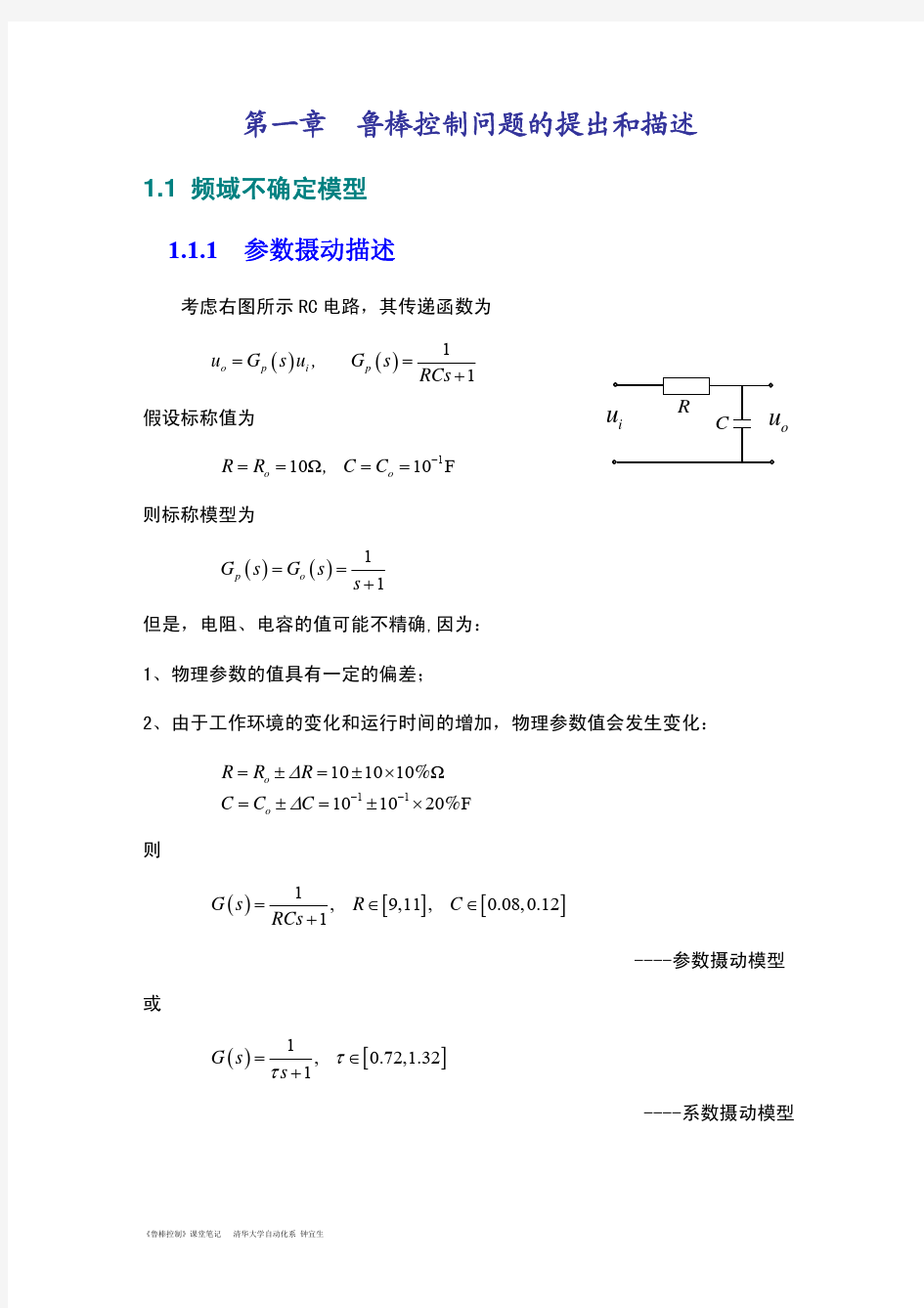
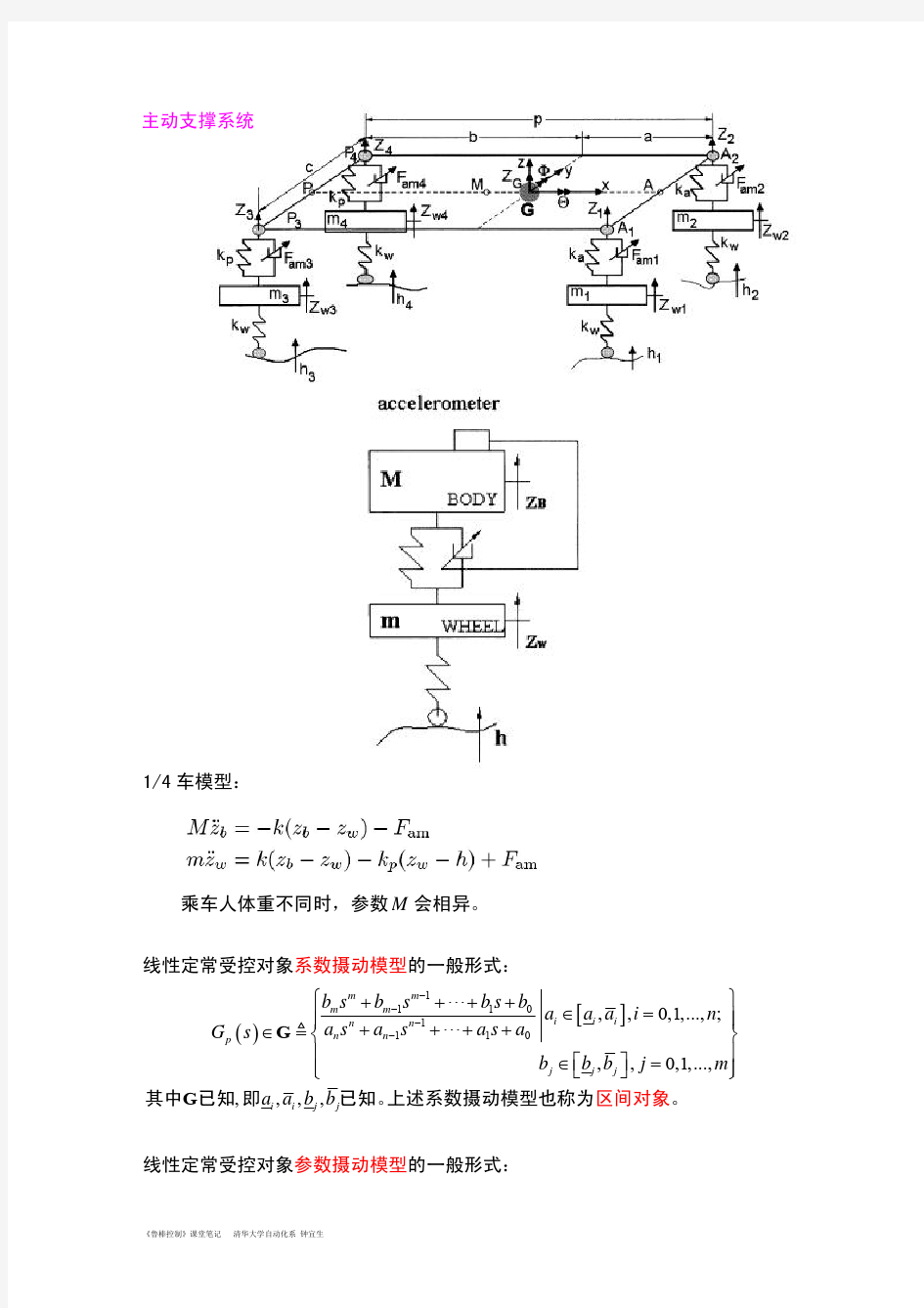
《鲁棒控制》-1-鲁棒控制问题的提出和描述_32201772
土木专业英语翻译作业
桂林理工大学土木与建筑工程学院 土木工程专业英语外文翻译,中文翻译 姓名:马凤志 专业:土木应用 班级:10级9班 学号:3100510939
原文
中文翻译 The Influence of Concrete Compaction on the Strength of Concrete Filled Steel Tubes 压实混凝土对混凝土强度的影响 Lin-Hai Han School of Civil Engineering, Harbin University of Civil Engineering and Architecture, Haihe Road 202, PO Box 689, Harbin 150090, P.R. China 韩林海,哈尔滨建筑大学,土木与建筑工程学院,海河路202号,邮政信箱,689,哈尔滨,150090 中国 ABSTRACT: Tests on twenty-one concrete filled steel tubes to investigate the influence of compaction methods on the strength of concrete filled steel tubular members are reported. 摘要:测试二十一钢管混凝土试验,研究了钢管对混凝土构件强度压实方法的影响报告。 Two parameters were investigated, including slenderness ratio and load eccentricity. 对两个参数进行研究,包括长细比和荷载偏心。 It was found that better compaction of concrete resulted in higher values of the ultimate strength of concrete filled steel
非线性系统的鲁棒自适应控制
非线性系统的鲁棒自适应控制 Robust Adaptive Control of Uncertain Nonlinear Systems 郝仁剑3120120359 摘要:本文以非线性系统的控制问题为背景,介绍了多种经典的非线性系统的控制方法以及研究进展,分析了各种控制方法存在的优点和不足。着重介绍了鲁棒自适应控制在非线性系统中的应用,结合该领域的近期研究进展和实际应用背景,给出对鲁棒自适应控制的进一步研究目标。 关键词:非线性系统鲁棒控制自适应控制 1.前言 任何实际系统都具有非线性特性,非线性现象无处不在。严格地说,线性特性只是其中的特例,但是非线性系统与线性系统又具有本质的区别。由于非线性系统不满足叠加原理,因此非线性特性千差万别,这也给非线性系统的研究带来了很大的困难。同时,对于非线性系统很难求得完整的解,一般只能对非线性系统的运动情况做出估计。众所周知,控制理论经历了经典控制理论和现代控制理论两个发展阶段。在第二次世界大战前后发展起来的经典控制理论应用拉普拉斯变换等工程数学工具来分析系统的品质。它广泛地应用于单输入单输出、线性、定常、集中参数系统的研究中。随着控制对象的日益复杂以及人们对控制系统精度的不断提高,经典控制理论的局限性就暴露出来了。在20世纪50年代,Bellman根据最优原理创立了动态规划。同时庞特里亚金等学者创立了最大值原理。后来,Kalman提出了一系列重要的概念,如可观性,可控性,最优线性二次状态反馈,Kalman滤波等。这些理论和概念的提出大大促进了现代控制理论的发展。控制系统的设计都需要以被控对象的数学模型为依据,然而对于任何被控对象不可能得到其精确的数学模型,如在建立机器人的数学模型时,需要做一些合理的假设,而忽略一些不确定因数。不确定性的必然存在也正促使了现代控制理论中另一重要的研究领域——鲁棒控制理论的发展。Zmaes关于小增益定理的研究以及Kalman关于单输入单输出系统LQ调节器稳定裕量的分析为鲁棒控制理论的发展产生了重要的影响。特别是Zmaes1981年发表的论文[1]标志H∞控制理论的起步。1984年Francis和Zmaes基于古典插值理论提出H∞问题的初步解法。Glover运用Hankel算子理论给出了H∞问题的解析解。Doyle在状态空间上对Glover解法进行整理和归纳。至此H∞控制理论体系初步形成。同时,Doyle首次提出结构化奇异值的概念,后来形成了μ解析理论。另外一种重要的控制器设计方法是基于Lyapunov函数的方法。在进行鲁棒控制器的设计时,一般都假设系统的不确定性属于一个可描述集,比如增益有界,且上界己知等。一般来说,鲁棒控制是比较保守的控制策略。对所考虑集合内的个别元素,该系统并不是最佳控制。对于具有参数不确定性的一类系统,自适应控制技术被提了出来,如模型参考自适应控制和自校正控制等。在实际应用中,由于被控对象具有未建模动态,过程噪声或扰动的统计特性远比设计时所设想的情况更复杂,以及持续激励条件和严正实条件等“理想条件”被打破,这都会导致自适应控制算法的失稳。于是自适应控制的鲁棒性课题,即鲁棒自适应控制受到了广泛的关注。大量的工程实践表明,对于复杂的工业对象和过程,引入自适应策略能够提高控制精度,提高生产效率,降低成本。近年来,非线性自适应控制技术取得突破性的发展,控制器的结构化设计技术也正日益得到广泛的研究与应用。
专业英语大作业
专业英语大作业 一:英译汉 翻译范围TCP/IP Illustrated, V olume 1: The Protocols 5.1~5.5 15.1~15.2 第5章RARP:逆地址解析协议 5.1简介 5.2 RARP报文格式 5.3 RARP示例 5.4 RARP服务的设计 5.5小结 练习 5.1简介 一个拥有本地磁盘的系统通常是从磁盘文件读取配置文件中获取其IP地址。但一个没有磁盘的系统,如X终端或无盘工作站,需要一些其它方式去获得其IP地址。 每个系统在网络上都有一个唯一的硬件地址,由网络接口的制造商分配。 RARP的原则是无盘系统从接口卡上读取其独特的硬件地址,并发送RARP请求(网络上的广播帧)要求别人对无盘系统的IP地址(使用RARP回应)进行应答。 虽然这个概念很简单,执行往往比ARP更难,在本章后面会描述其原因。 RARP的正式规范是RFC 903。 5.2 RARP报文格式 RARP报文的格式几乎与ARP报文是相同的(图4.3)。唯一的区别是,RARP 的请求或应答帧类型为0×8035,并且在操作层RARP请求值为3、RARP应答值为4。 图4-3 ARP在网络上请求与应答报文的格式 与ARP一样,RARP服务器请求是广播和RARP应答通常是单播。 5.3 RARP示例 在我们的网络,我们可以强制sun主机从网络引导,而不是它的本地磁盘。 如果我们在主机bsdi上运行RARP服务器和tcpdump,我们得到如图5.1所示的输出。我们使用-e参数去标记tcpdump的打印硬件地址:
图5.1 RARP请求和应答。 该RARP请求是广播(1号线)的,第2行的RARP应答是单播的。第2行的输出,“at sun”,意味着RARP应答包含了主机sun(140.252.13.33)的IP地址。 在第3行,我们看到,一旦sun接收其IP地址,它会发出一个TFTP读请求(RRQ)的文件8CFCOD21.SUN4C。(TFTP是简单文件传输协议,我们在第15章进行详细描述)。在文件名中的8个十六进制数字是sun主机的IP地址140.252.13.33的十六进制表示形式。这是在RARP应答中返回的IP地址。该文件名的其余部分,后缀SUN4C表示系统正在引导的类型。 Tcpdump表示第3行是一个长度为65的IP数据报,而不是一个UDP数据报(实际上它确实是),因为我们运行tcpdump命令使用-e参数,看硬件级别的地址。另一点,在图5.1要注意的是在第2行的以太网帧的长度似乎比最小较短(我们所说的是在4.5节60字节)。原因是我们的系统,该系统上运行的tcpdump 发送该以太网帧(BSDI)。该应用程序rarpd,写42字节到BSD分组过滤器装置(14字节的以太网报头和28字节的RARP应答),这是什么的tcpdump收到的副本。但以太网设备驱动程序垫这个短帧的最小尺寸为传输(60 )。如果我们在另一个系统上已经运行的tcpdump ,长度会是60。 我们可以看到在这个例子,当这种无盘系统接收在RARP应答它的IP地址,它会发出一个TFTP请求来读取一个引导映像。在这一点上,我们不会进入其他详细介绍无盘系统是如何引导自己。(第16章介绍了使用RARP ,BOOTP和TFTP无盘X终端的引导顺序。) 图5.2表示出了如果有在网络上没有RARP服务器所得到的数据包。每个数据包的目的地址为以太网的广播地址。以太网地址跟随的是目标硬件地址,并按照发送端的硬件地址发送。
鲁棒控制
鲁棒控制理论中的H∞控制理论 (浙江大学宁波理工学院信息科学与工程分院自动化) 【摘要】首先简要的介绍了鲁棒控制中的H∞控制理论,并把其发展分为两个阶段,而后就上当已存在的H∞控制的主要成果进行了讨论和归纳,还指出了H∞控制理论尚未解决的问题。 【关键词】H∞控制理论;非线性系统;时滞;范数 1.概述 鲁棒控制(Robust Control)方面的研究始于20世纪50年代。在过去的20年中,鲁棒控制一直是国际自控界的研究热点。所谓鲁棒性,是指标称系统所具有的某一种性能品质对于具有不确定性的系统集的所有成员均成立,如果所关心的是系统的稳定性,那么就称该系统具有鲁棒稳定性;如果所关心的是用干扰抑制性能或用其他性能准则来描述的品质,那么就称该系统具有鲁棒性能。主要的鲁棒控制理论有:Kharitonov区间理论;H∞控制理论;结构奇异值理论u理论; 鲁棒控制理论是分析和处理具有不确定性系统的控制理论,包括两大类问题:鲁棒性分析及鲁棒性综合问题。鲁棒性分析是根据给定的标称系统和不确定性集合,找出保证系统鲁棒性所需的条件;而鲁棒性综合(鲁棒控制器设计问题)就是根据给定的标称模型和不确定性集合,基于鲁棒性分析得到的结果来设计一个控制器,使得闭环系统满足期望的性能要求。 2.H∞控制理论出现的背景及意义 1981年,加拿大著名学者Zames在其论文中引入了H∞范数作为目标函数进行优化设计,标志着H∞控制理论的诞生。Zames考虑了这样一个单入单出( SISO)系统的设计问题: 假设干扰信号属于某一有限能量的已知信号集,要求设计一个反馈控制器,使闭环系统稳定,且干扰对系统的影响最小。要解决这样的问题就必须在能够使闭环系统稳定的所有控制器中选出一个控制器使之相应的灵敏度函数的H∞范数最小。 虽然Zames 首先提出了H∞最优化问题,但是他没能给出行之有效的解法。
自适应PID控制综述(完整版)
自适应PID控制 摘要:自适应PID控制是一门发展得十分活跃控制理论与技术,是自适应控制理论的一个重要组成部分,本文简要回顾PID控制器的发展历程,对自适应PID控制的主要分支进行归类,介绍和评述了一些有代表性的算法。 关键词:PID控制,自适应,模糊控制,遗传算法。 Abstract: The adaptive PID control is a very active developed control theory and technology and is an important part of adaptive control theory.This paper briefly reviews the development process PID controller.For adaptive PID control of the main branches, the paper classifies,introduces and reviews some representative algorithms. Keywords: PID control, adaptive, fuzzy control, genetic algorithm 1 引言 从问世至今已历经半个世纪的PID控制器广泛地应用于冶金、机械、化工、热工、轻工、电化等工业过程控制之中,PID控制也是迄今为止最通用的控制方法, PID控制是最早发展起来的控制策略之一,因为他所涉及的设计算法和控制结构都很简单,并且十分适用于工程应用背景,所以工业界实际应用中PID 控制器是应用最广泛的一种控制策略(至今在全世界过程控制中用的80% 以上仍是纯PID调节器,若改进型包含在内则超过90%)。由于实际工业生产过程往往具有非线性和时变不确定性,应用常规PID控制器不能达到理想控制效果,长期以来人们一直寻求PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。随着微机处理技术和现代控制理论诸如自适应控制、最优控制、预测控制、鲁棒控制、智能控制等控制策略引入到PID控制中,出现了许多新型PID控制器。人们把专家系统、模糊控制、神经网络等理论整合到PID控制器中,这样既保持了PID控制器的结构简单、适用性强和整定方便等优点,又通过先进控制技术在线调整PID控制器的参数,以适应被控对象特性的变化。 2 自适应PID控制概念及发展 2.1 PID控制器 常规PID控制系统原理框图如下图所示,系统由模拟PID控制器和被控对象组成。
电子商务专业英语作业翻译
E-commerce (electronic commerce or EC) is the buying and selling of goods and services on the Internet, especially the World Wide Web. In practice, this term and a newer term, e-business, are often used interchangably. For online retail selling, the term e-tailing is sometimes used. 电子商务(电子商务或电子商务)是购买和出售的商品和服务在互联网,特别是万维网上的。在实践中,这项和一个新的术语,电子商务,往往交替使用。网上零售,电子零售的术语有时用。 E-tailing or The Virtual Storefront and the Virtual Mall 网上或虚拟商店和虚拟商店 As a place for direct retail shopping, with its 24-hour availability, a global reach, the ability to interact and provide custom information and ordering, and multimedia prospects, the Web is rapidly becoming a multibillion dollar source of revenue for the world's businesses. A number of businesses already report considerable success. As early as the middle of 1997, Dell Computers reported orders of a million dollars a day. By early 1999, projected e-commerce revenues for business were in the billions of dollars and the stocks of companies deemed most adept at e-commerce were skyrocketing. Although many so-called dotcom retailers disappeared in the economic shakeout of 2000, Web retailing at sites such as https://www.360docs.net/doc/6b1117786.html,, https://www.360docs.net/doc/6b1117786.html,, and https://www.360docs.net/doc/6b1117786.html, continues to grow. 作为一个直接的零售购物,其24小时供应,全球性的,互动的能力,并提供自定义信息和订购,和多媒体,网络正在迅速成为一个数十亿美元的收入来源,为全球的企业。一些企业已报告了相当大的成功。早在1997年年中,戴尔电脑报告的订单一百万美元一天。1999年初,预计的电子商务业务收入都在数十亿美元的股票和公司认为最善于电子商务暴涨。虽然许多所谓的互联网零售商消失在经济衰退2000,网上零售网站如https://www.360docs.net/doc/6b1117786.html,,https://www.360docs.net/doc/6b1117786.html,,和https://www.360docs.net/doc/6b1117786.html,继续增长 Market Research 市场研究 In early 1999, it was widely recognized that because of the interactive nature of the Internet, companies could gather data about prospects and customers in unprecedented amounts -through site registration, questionnaires, and as part of taking orders. The issue of whether data was being collected with the knowledge and permission of market subjects had been raised. (Microsoft referred to its policy of data collection as "profiling" and a proposed standard has been developed that allows Internet users to decide who can have what personal information.) Electronic Data Interchange (EDI)
《专业英语》课程作业
步京侄宛a琴 《专业英语》课程作业 学生姓名____________________________ 学号 __________________________ 院系 _________________________ 专业 __________________________ 任课教师____________________________
二0一五年六月 一、英译中(英文科技资料翻译) 原文: An operating system is the software which acts as an interface between a user of a computer and the computer hardware.The purpose of an operating system is to provide an environment in which a user may execute program. The primary goal of an operating system is thus to make the computer system convenient to use. A secondary goal is to use the computer hardware in an efficient way. We can view an operating system as a resource allocator. A computer system has many resources which may be required to solve a problem: CPU time, memory space, , input/output(I/O) devices, and so on.The operating system acts as the manager of these resources and allocates them to specific programs and users as necessary for their tasks. Since there may be many, possibly conflicting, requests for resources, the o/s must decide which requests are allocated resources to operate the computer system fairly and efficiently. Multimedia means, from the user ' perspective, that computer information can be represented through audio and/or video, in addition to text, image, graphics and animation . The integration of these media into the computer provides additional possibilities for the use of computational power currently available (e.g., for interactive presentation of huge amounts of information ). Furthermore, these data can be transmitted though computer and telecommunication networks, which implies applications in the areas of information distribution and cooperative work.Multimedia provides the possibility for a spectrum of new applications, many of which are in place today. A multimedia system distinguishes itself from other systems through several properties. We elaborate on the most important properties such as combination of the media, media-independence, computer control and integration.Not every arbitrary combination of media justifies the usage of the term multimedia. A simple text processing program with incorporated images is often called a multimedia application because two media are processed through one program.But one should talk about multimedia only when both continuous and discrete media are utilized.A text processing program with incorporated images is therefore not a multimedia application. An important aspect of different media is their level of independence from each other. In general, there is a request for independence of different media, but multimedia may require several levels of independence. On the one hand, a computer-controlled video recorder stores audio and video information, but there is an inherently tight connection between the two types of media. Both media are coupled together through the common storage medium of the tape. On the other hand, for the purpose of presentations, the combination of DAT recorder (Digital Audio Tape) signals and computer-available text satisfies the request for media-independence. Early computers were(physically) very large machines run from a console.The programmer would
鲁棒控制理论综述
鲁棒控制理论综述 作者学号: 摘要:本文首先介绍鲁棒控制理论涉及的两个基本概念(不确定性和鲁棒)和发展过程,然 H控制理论,最后指出鲁棒控制研后叙述鲁棒控制理论中两种主要研究方法:μ理论、∞ 究的问题和扩展方向。 H控制理论 关键词:鲁棒控制理论,μ理论,∞ 一、引言 自从系统控制(Systems and Control)作为一门独立的学科出现,对于系统鲁棒性的研究也就出现了。这是由这门学科的特色和研究对象决定的。对于世界上的任何系统。由于系统本身复杂性或是人们对其认识的不全面,在系统建立模型时,很难用数学语言完全描述刻画。在这样的背景下,鲁棒性的研究也就自然而然地出现了。 二、不确定性与鲁棒 1、不确定性 谈到系统的鲁棒性,必然会涉及系统的不确定性。由于控制系统的控制性能在很大程度上取决于所建立的系统模型的精确性,然而,由于种种原因实际被控对象与所建立的模型之间总存在着一定的差异,这种差异就是控制系统设计所面临的不确定性。这种不确定性通常分为两类:系统内部的不确定性和系统外部的不确定性。这样,就需要一种能克服不确定性影响的控制系统设计理论。这就是鲁棒控制所要研究的课题。 2、鲁棒 “鲁棒”一词来自英文单词“robust”的音译,其含义是“强壮”或“强健”。所谓鲁棒性(robustness),是指一个反馈控制系统在某一特定的不确定性条件下具有使稳定性、渐近调节和动态特性这三方面保持不变的特性,即这一反馈控制系统具有承受这一类不确定性的能力。具有鲁棒性的控制系统称为鲁棒控制系统。在工程实际控制问题中,系统的不确定性一般是有界的,在鲁棒控制系统的设计中,先假定不确定性是在一个可能的范围内变化,然后在这个可能的变化范围内进行控制器设计。鲁棒控制系统设计的思想是:在掌握不确定性变化范围的前提下,在这个界限范围内进行最坏情况下的控制系统设计。因此,如果设计的控制系统在最坏的情况下具有鲁棒性,那么在其他情况下也具有鲁棒性。 三、发展历程 鲁棒控制系统设计思想最早可以追溯到1927年Black针对具有摄动的精确系统的大增益反馈设计。由于当时不知道反馈增益和控制系统稳定性之间的确切关系,所以设计出来的控制系统往往是动态不稳定的。早期的鲁棒研究主要集中在Bode图,1932年Nyquist提出了基于Nyquist曲线的频域稳定性判据,使得反馈增益和控制系统稳定性之间的关系明朗化。1945年Bode讨论了单输入单输出(SISO)反馈系统的鲁棒性,提出了利用幅值和相位稳定裕度来得到系统能容许的不确定范围。这些方法主要用于单输入单输出系统而且这些关于鲁棒控制的早期研究主要局限于系统的不确定性是微小的参数摄动情形,尚属灵敏度分析的范畴,从数学上说是无穷小分析思想,并且只是停留在理论上。20世纪六七十年代,鲁棒控制只是将SISO系统的灵敏度分析结果向MIMIO进行了初步的推广[1],与此同时,状态空间理论引入控制论后,系统控制取得了很大的发展,鲁棒问题也显得更加重要,其中就要提到两篇对现代鲁棒控制理论的建立有重要影响的文章:一篇是Zames在1963年关于小增益定理的论文[2],另一篇是1964年Kalman关于单入单输出系统LQ调节器稳定裕量分析的研究报告[3]。鲁棒控制这一术语第一次在论文中出现是在1971年Davion的论文[4],而首先将鲁棒控制写进论文标题的是Pearson等人于1974年发表的论文[5]。当然,鲁棒控制能够
专业英语作业
PART1: Reading How to quickly read an English paper? Metalworking Glossary Cutting Tool Engineering, November, 2000, 209-238 The metalworking glossary defines terms common to those who cut and grind metals and other materials. The terms are divided into 11 categories: 1.Manufacturing Definitions; 2.Machining Operations; 3.Machine Tools and Ancillary Equipment; 4.Cutting Tools and Related Terminology 5.Coolants, Lubricants, and Related Terminology 6.Accessories and Attachments; 7.Alloys, Coatings, Material Compositions, and Related Terminology; 8.Heat-treating and Special Processes; 9.Inspection, Measurement, and Quality Control; 10.Robotics and Automated Assembly; 11.Nontraditional Machining How to Make Use of the Linguistic Features of Scientific Papers (科技论文的语言特点) 1.Linguistic Style(语体) 科学技术领域,科技工作者的任务: 描述自然现象 分析自然现象产生的规律 研究自然现象应用于人类生产实践 的方法 表达所取得的成果及其应用 思维形式:概念、公式或公式化的概念 思维活动的语言表达:按照严格的逻辑程序导 出的判断和推理,科技文体具有抽象性、概念 性和高度的逻辑性 内容:写实 语言风格:准确严谨、合乎逻辑,非形象性(理 性)、客观性、无明显感情色彩、简洁明快。Literature 1.Conference paper 2.Journal paper 3.Lecture 4.Book (Dissertation or Thesis) 5.Report (News) 6.Manual and Specification Paper and Experimental Report: Title, Abstract, Introduction, Results and Analysis, Conclusion and Discussion Book & Lecture: Title, Author(s), Name of the process or publisher, Name of the printing House, Name of the distributor, Date of publication, Date of printing, Synopsis, Note by the publisher, International Standard Book Number, Preface or Foreword, Acknowledgements, Contents, Text of the book, Appendix or Supplement, Index, Epilogue Manual and Instructions, Directions: Principle, Operation, Maintenance 2.Vocabulary Typically Professionalized Terms Whenever a force acts on a body so as to make the body move through some distance, it is said to have done work. Body n. 身体, 肉体, 人, 尸体, 主要部分, 团体, 大量vt. 赋以形体 机械专业n. 车身,机身
鲁棒控制综述
鲁棒控制综述 课程目标 1.了解鲁棒控制研究的基本问题 2.掌握鲁棒控制的基础知识和基本概念 3.明确鲁棒控制问题及其形式化描述 4.掌握几种鲁棒稳定性分析与设计方法 5.掌握状态空间H∞控制理论 6.了解鲁棒控制系统的μ分析与μ综合方法 7.初步了解非线性系统鲁棒控制方法 8.掌握时滞系统的鲁棒控制稳定性分析 控制系统就是使控制对象按照预期目标运行的系统。 大部分的控制系统是基于反馈原理来进行设计的 反馈控制已经广泛地应用于工业控制、航空航天和经济管理等各个领域。 不确定性 在实际控制问题中,不确定性是普遍存在的 所描述的控制对象的模型化误差 可能来自外界扰动 因此,控制系统设计必须考虑不确定性带来的影响。 控制系统设计的任务 对于给定的控制对象和传感器,寻找一个控制器,使反馈控制系统能够在实际工作环境中按预期目标运行 ●实际控制对象就是具体的装置、设备或生产过程 ●通过各种建模方法,可以建立实际控制对象的模型 ●针对控制对象的模型,应用控制理论提供的设计方法设计出控制器,对实际控制对 象实施控制 ●控制系统的控制效果在很大程度上取决于实际控制对象模型的准确性 ●在控制系统设计中采用的模型与实际控制对象存在着一定的差异,即存在着模型不 确定性 ●控制系统的运行也受到周围环境和有关条件的制约 ●例如,在图1-1中,传感器噪声n和外部扰动d分别来自控制系统本身和控制系统 所处的环境,它们往往是一类未知的扰动信号 ●这种扰动不确定性对控制系统的运动将产生的影响 控制系统设计中需要考虑的不确定性 (1)来自控制对象的模型化误差; (2)来自控制系统本身和外部的扰动信号 ●需要一种能克服不确定性影响的控制系统设计理论 ●这就是鲁棒控制所要研究的课题 1.1.2 控制系统设计的基本要求 在控制系统设计中,往往把图1-1所示的反馈控制系统更一般化,考虑如图1-3所示的单位反馈控制系统,其中P是控制对象,C是控制器。
专业英语翻译作业译文
专业英语翻译作业译文 1.科学家们认为,这样微弱的粒子正则轨道实际上是不存在的。的想法现在已被事实否定了。 2.虽然小行星很小很微弱,天文学家已经知道很多关于它们的大小,形状和组合物,通过使用各种直接和间接的技术。例如,它是已知的许多小行星的亮度的周期性变化。 3.随着疾病的进展,大肌肉也稳步增长疲软。如果不治疗,患者变得瘫痪有呼吸非常困难,并最终死亡。 4.将信息从计算机的一部分转移到另一个取决于电流进行了线。 5.只有两件事是天文观测----站立的地方和地方看需要。 6.太阳风严重扭曲地球磁场,把它拖了一个长长的尾巴。 7.使用计算机,我们组成了一系列的合成歌曲的混合自然音节为不同的模式。 8.苍头燕雀的显示,找出正确的声音模仿的本能,这表明本能学习鸟类作为他们发展他们的歌曲一样重要。 9.We know from the fossil record that our ancestors and other intelligent creatures,the australopithecines,branched off from an apelike creature 2.5 million to 3 million years ago ,and coexisted until the australopithecines died out a little less than a million years ago.Stone tools and other evidence at campsites that date form about 2,000,000 B.C.indicate that some form of australopithecine performed human activities ------ making tools,sharing food and working together. 我们知道从化石记录我们的祖先和其他智能生物,猿,分枝从远古的生物2500000到3000000年前,南方古猿和共存直到死了比一百万年前少了一点。石器和露营地,日期约2000000 b.c.表明某种形式的南方古猿表现人类活动------制作工具的其他证据,分享食物,一起工作。 10.properties of metals Metals are of great use to mankind because of their useful engineering properties. Strength is one of the important properties of metals .It enables them to resist external loads without incurring structural damages.Metals, possessing toughness, a property of absorbing considerable energy before fracture,bend rather than break. Another property of metals is elasticity.Because of their elasticity,metals subjected to an external load are distorted or stained, and return to their original dimensions when the load is released if the load is not too great. Ductility is the capacity of a metal to be permanently deformed in tension without breaking. That is why some metals, such as copper and aluminum, can be drawn erom a large into a smaller diameter of wire.
鲁棒控制原理及应用举例
鲁棒控制原理及应用举例 摘要:本文简述了鲁棒控制的由来及其发展历史,强调了鲁棒控制在现代控制系统中的重要性,解释了鲁棒控制、鲁棒性、鲁棒控制系统、鲁棒控制器的意义,介绍了鲁棒控制系统的分类以及其常用的设计方法,并对鲁棒控制的应用领域作了简单介绍,并举出实例。 关键词:鲁棒控制鲁棒性不确定性设计方法现代控制系统 经典的控制系统设计方法要求有一个确定的数学模型。在建立数学模型的过程中,往往要忽略许多不确定因素:如对同步轨道卫星的姿态进行控制时不考虑轨道运动的影响,对一个振动系统的控制过程中不考虑高阶模态的影响等。但经过以上处理后得到的数学模型已经不能完全描述原来的物理系统,而仅仅是原系统的一种近似。对许多要求不高的系统,这样的数学模型已经能够满足工程要求。然而,对于一些精度和可靠性要求较高的系统,如导弹控制系统设计,若采用这种设计方法,就会浪费了大量的人力物力在反复计算数弹道、调整控制器参数以及反复试射上。因此,为了解决不确定控制系统的设计问题,科学家们提出了鲁棒控制理论。由于鲁棒控制器是针对系统工作的最坏情况而设计的,因此能适应所有其它工况,所以它是解决这类不确定系统控制问题的有力工具。 鲁棒控制(Robust Control)方面的研究始于20世纪50年代。上世纪60年代,状态空间结构理论的形成,与最优控制、卡尔曼滤波以及分离性理论一起,使现代控制理论成了一个严密完整的体系。随着现代控制理论的发展,从上世纪80年代以来,对控制系统的鲁棒性研究引起了众多学者的高度重视。在过去的20年中,鲁棒控制一直是国际自控界的研究热点。 通常说一个反馈控制系统是鲁棒的,或者说一个反馈控制系统具有鲁棒性,就是指这个反馈控制系统在某一类特定的不确定性条件下具有使稳定性、渐进调节和动态特性保持不变的特性,即这一反馈控制系统具有承受这一类不确定性影响的能力。设被控系统的数学模型属于集合D,如果系统的某些特性对于集合U中的每一对象都保持不变,则称系统具有鲁棒性。鲁棒性又可以分为鲁棒稳定性、鲁棒渐进调节和鲁棒动态特性。鲁棒稳定性是指在一组不确定性的作用下仍然能够保证反馈控制系统的稳定性;鲁棒渐进调节是指在一组不确定性的影响下仍然可以实现反馈控制系统的渐进调节功能;鲁棒动态特性通常称为灵敏度特性,即要求动态特性不受不确定性的影响。 所谓鲁棒控制,使受到不确定因素作用的系统保持其原有能力的控制技术。鲁棒控制的主要思想是针对系统中存在的不确定性因素,设计一个确定的控制律,使得对于系统中所有的不确定性,闭环系统能保持稳定并具有所期望的性能。
专业英语课文翻译
School of chemical engineering and pharmaceutical test tubes 试管test tube holder试管夹test tube brush 试管刷test tube rack试管架 beaker烧杯stirring搅拌棒thermometer温度计boiling flask长颈烧瓶Florence flask平底烧瓶 flask,round bottom,two-neck boiling flask,three-neck conical flask锥形瓶wide-mouth bottle广口瓶graduated cylinder量筒gas measuring tube气体检测管volumetric flask容量瓶transfer pipette移液管Geiser burette(stopcock)酸式滴定管funnel漏斗Mohr burette(with pinchcock)碱式滴定管 watch glass表面皿evaporating dish蒸发皿ground joint磨口连接Petri dish有盖培养皿 desiccators干燥皿 long-stem funnel长颈漏斗filter funnel过滤漏斗 Büchner funnel瓷漏斗separatory funnel分液漏斗 Hirsh funnel赫尔什漏斗filter flask 吸滤瓶Thiele melting point tube蒂勒熔点管 plastic squeez e bottle塑料洗瓶 medicine dropper药用滴管rubber pipette bulb 吸球microspatula微型压舌板pipet吸量管mortar and pestle研体及研钵filter paper滤纸Bunsen burner煤气灯burette stand滴定管架support ring支撑环 ring stand环架distilling head蒸馏头 side-arm distillation flask侧臂蒸馏烧瓶air condenser空气冷凝器centrifuge tube离心管 fractionating column精(分)馏管 Graham condenser蛇形冷凝器 crucible坩埚crucible tongs坩埚钳beaker tong烧杯钳economy extension clamp经济扩展夹extension clamp牵引夹utility clamp铁试管夹hose clamp软管夹 burette clamp pinchcock;pinch clamp弹簧夹 screw clamp 螺丝钳 ring clamp 环形夹goggles护目镜stopcock活塞wire gauze铁丝网analytical balance分析天平 分析化学 absolute error绝对误差accuracy准确度assay化验analyte(被)分析物calibration校准constituent成分coefficient of variation变异系数confidence level置信水平detection limit检出限determination测定estimation 估算 equivalent point等当点gross error总误差impurity杂质indicator指示剂interference干扰internal standard内标 level of significance显著性水平 limit of quantitation定量限masking掩蔽matrix基体precision精确度 primary standard原始标准物purity纯度qualitative analysis定性分析 quantitative analysis定量分析random error偶然误差reagent试剂 relative error相对误差robustness耐用性sample样品relative standard deviation相对标准偏差 selectivity选择性sensitivity灵敏度specificity专属性titration滴定significant figure有效数字solubility product溶度积 1