船姿分析及其对多波束测量的影响_赵建虎
第26卷第2期武汉大学学报·信息科学版Vol.26No.2 2001年4月Geomatics and Information Science of Wuhan University Apr.2001文章编号:1000_050X(2001)02_0144_06文献标识码:A
船姿分析及其对多波束测量的影响
赵建虎1 刘经南2 张红梅3
(1 武汉大学测绘科学与技术学院,武汉市珞喻路129号,430079)
(2 武汉大学校长办公室,武汉市珞珈山,430079)
(3 武汉大学动力与机械工程学院,武汉市珞珈山,430072)
摘 要:根据船体操纵性和耐波性理论,结合船姿实验数据,分析了姿态参数的外界受动因素。考虑船姿对多波束测量的影响,结合多波束测量原理,分析了不同姿态对坐标的影响,给出了相应的坐标计算和误差影响数学模型,最后根据姿态测量误差对测深的影响,结合IHO测深规定,计算出了不同姿态测量的精度指标;分析了姿态测量误差对条带拼接的影响,并提出了相应的解决方法。
关键词:船姿;船姿分析;船体坐标系;当地坐标系
中图法分类号:P228.4;P224;P223.7
根据船体操纵性和耐波性理论,船姿主要受控于风、流等外界的作用。在海上主要表现为风的作用,在内河表现为风、流的共同作用。根据多波束测量原理,在理想状态下,换能器的波束断面与水面、航向正交。但在实际测量中,由于风、流等外界因素的作用及船姿的瞬时变化,安装在船体上的多波束换能器也随之变化,致使多波束的理想测量状态经常被打破,瞬时实测断面或者同铅垂方向存在一定的夹角,或者同航向正交方向存在一个小的夹角,或者上述两种情况并存。在此情况下,每个波束实测的深度和平面位置不再真实地反映波束脚印在当地坐标系下的位置,为此就必须对船姿引起的伪观测值进行改正,以获得真实或近似的海底点位置。因此,讨论船姿的受动因素,分析姿态对测量的补偿以及姿态测量误差对波束脚印坐标的影响,对于指导野外作业和提高多波束测量精度很有意义。
1 船姿分析
船体姿态分析的目的在于分析航偏角h (heading)、横摇角r(roll)、纵摇角p(pitch)和动态吃水h ds(dy namitic squat)4个姿态参数同风、流、航偏角、船体速度、水深及波浪等外界扰动因素之间的联系。本节根据测姿实验数据,对船姿产生的原因进行了分析。1.1 航偏角受动因素分析
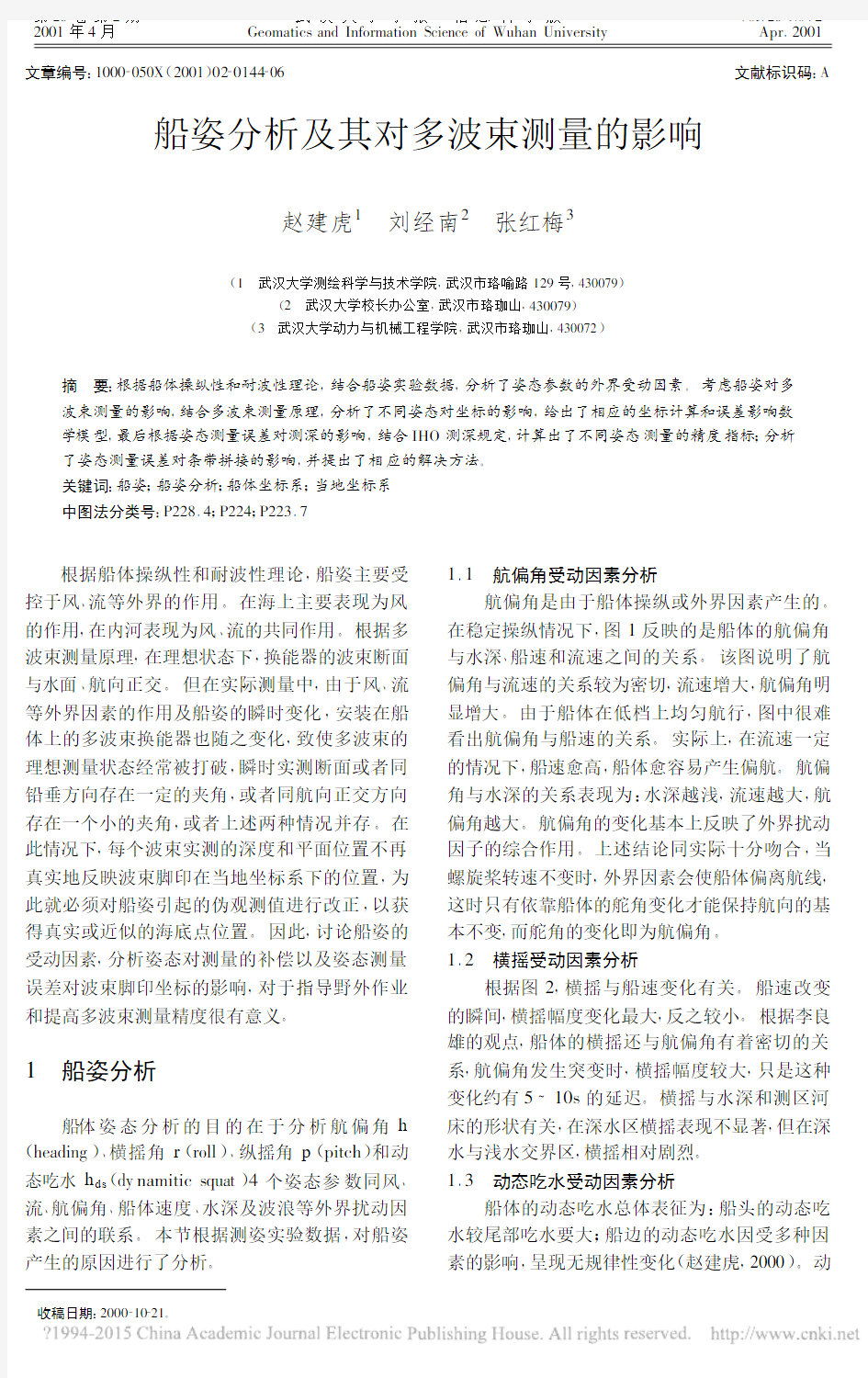
航偏角是由于船体操纵或外界因素产生的。在稳定操纵情况下,图1反映的是船体的航偏角与水深、船速和流速之间的关系。该图说明了航偏角与流速的关系较为密切,流速增大,航偏角明显增大。由于船体在低档上均匀航行,图中很难看出航偏角与船速的关系。实际上,在流速一定的情况下,船速愈高,船体愈容易产生偏航。航偏角与水深的关系表现为:水深越浅,流速越大,航偏角越大。航偏角的变化基本上反映了外界扰动因子的综合作用。上述结论同实际十分吻合,当螺旋桨转速不变时,外界因素会使船体偏离航线,这时只有依靠船体的舵角变化才能保持航向的基本不变,而舵角的变化即为航偏角。
1.2 横摇受动因素分析
根据图2,横摇与船速变化有关。船速改变的瞬间,横摇幅度变化最大,反之较小。根据李良雄的观点,船体的横摇还与航偏角有着密切的关系,航偏角发生突变时,横摇幅度较大,只是这种变化约有5~10s的延迟。横摇与水深和测区河床的形状有关,在深水区横摇表现不显著,但在深水与浅水交界区,横摇相对剧烈。
1.3 动态吃水受动因素分析
船体的动态吃水总体表征为:船头的动态吃水较尾部吃水要大;船边的动态吃水因受多种因素的影响,呈现无规律性变化(赵建虎,2000)。动
收稿日期:2000_10_21。
DOI:10.13203/j.wh ugis2001.02.010
态吃水与船速(或加速度)关系密切,加速时船头上扬,船尾下沉,到达一定极限后,船头迅速下沉;减速时船头吃水开始减小,尾部亦上扬,随即又下沉;速度变化不大时,首尾动态吃水变化不大。图3反映了船体中心动态吃水与速度的关系曲线。在船速发生变化瞬间,上述关系同霍密尔船体动态吃水经验模型十分吻合。霍密尔动态吃水经验模型为:
d s =K V
2
H s /H
式中,d s 为动态吃水改正数;K 为船型系数;V 为船速;H 为测区平均水深;H s 为静态吃水。1.4 纵摇受动因素分析
一般情况下,纵摇表现不如横摇显著(赵建虎,2000),图4也表明了这点。同时,纵摇与船速有关,船体变速时,纵摇变化最大,到达一定程度,又迅速减小,恢复到船体的平衡状态;匀速时,纵摇变化幅度较小,相对稳定。纵摇同航偏角有一定的关系,航偏角突变时,纵摇变化幅度较大;平稳变化时,变化幅度相对较小(李良雄
,2000)。
图1 航偏角与水深、速度和流速的关系 图2 横摇和船速的关系
Fig .1 T he Relation of Yawing ,Depth ,Velocity ,Current Velocity Fig .2 T he Relation of
Roll and V essel Velocity
图3 动态吃水与速度的关系曲线 图4 纵摇与速度的关系曲线
Fig .3 T he Relation of Dy namic Squat and V elocity Fig .4 T he Relation of Pitch and V essel Velocity
2 船姿对多波束测量的影响
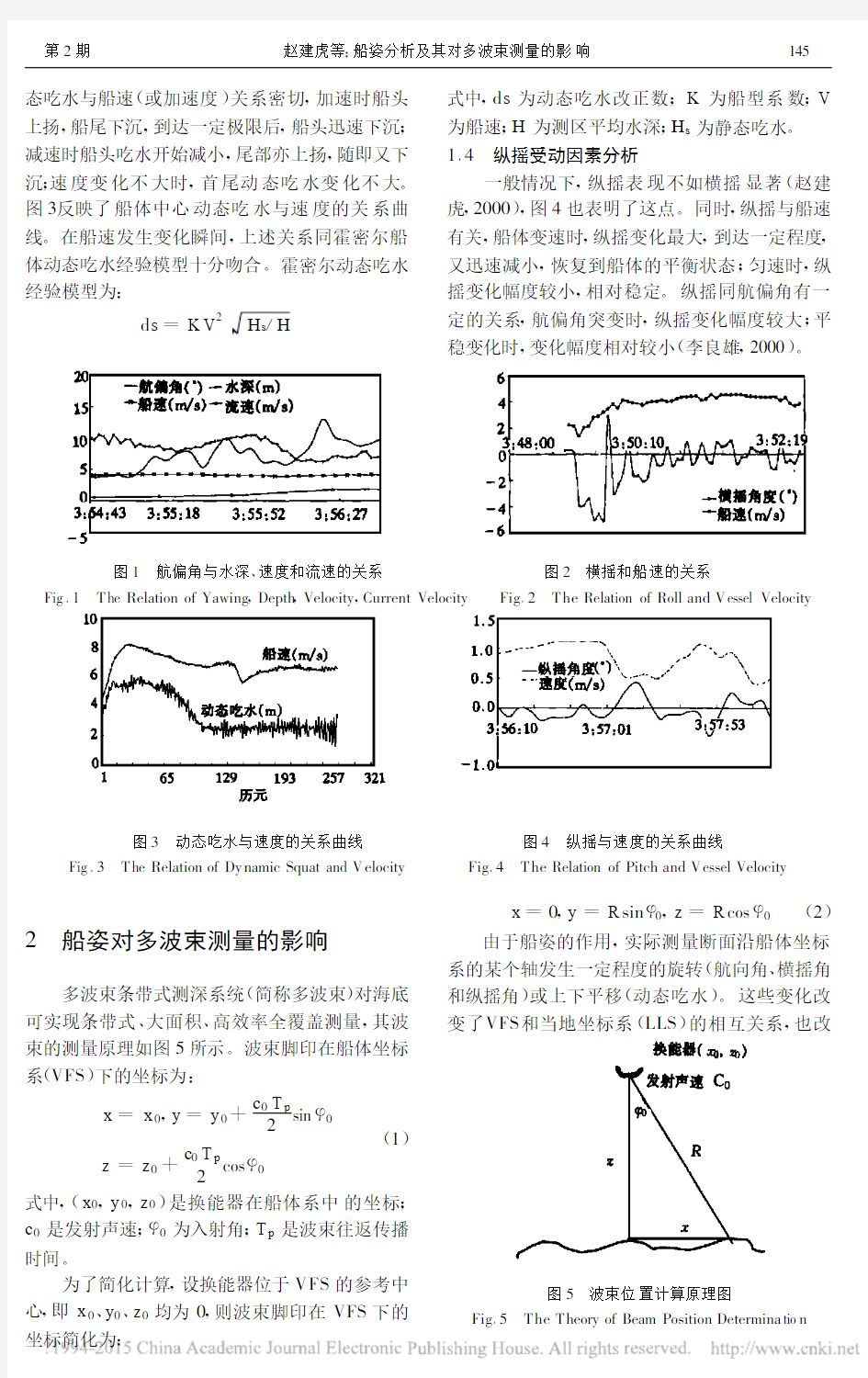
多波束条带式测深系统(简称多波束)对海底可实现条带式、大面积、高效率全覆盖测量,其波
束的测量原理如图5所示。波束脚印在船体坐标系(VFS )下的坐标为:
x =x 0,y =y 0+
c 0T p
2
sin φ0z =z 0+c 0T p
2
cos φ0
(1)
式中,(x 0,y 0,z 0)是换能器在船体系中的坐标;c 0是发射声速;φ0为入射角;T p 是波束往返传播时间。
为了简化计算,设换能器位于VFS 的参考中心,即x 0、y 0、z 0均为0,则波束脚印在VFS 下的
坐标简化为:
x =0,y =R sin φ0,z =R cos φ0(2)
由于船姿的作用,实际测量断面沿船体坐标系的某个轴发生一定程度的旋转(航向角、横摇角和纵摇角)或上下平移(动态吃水)。这些变化改变了VFS 和当地坐标系(LLS )的相互关系,也改
图5 波束位置计算原理图
Fig .5 T he T heory of Beam Position Determina tio n
145
第2期 赵建虎等:船姿分析及其对多波束测量的影响
变了波束脚印坐标在VFS 下的计算参数,同时姿态测量误差也必然影响到波束脚印的坐标精度。2.1 航偏角h 的影响
由于各种因素的作用,航向方向不可能总与测线方向保持一致,而是绕z 轴在水平面上产生h 角扭动,如图6所示。该扭动对于波束脚印在VFS 下的坐标不会产生影响,但是它使得VFS 同LLS 之间的旋转角量(航向角)从原来的A 0变化为A =A 0+h (相对于计划测线,航向偏左,h 为正,反之为负),因而会影响到波束脚印在LLS 下的坐标。LLS 下的坐标和航向角测量误差Δh 对波束脚印坐标的影响见式(3)、(4):
X Y Z
L LS
=cos A sin A
0-sin A
cos A 00
1
x
y z
VFS
=cos (A 0+h )
sin (A 0+h )0
-sin (A 0+h )
cos (A 0+h )0
01
0R sin φ
R cos φVFS
(3)
d x
d y d z
VFS
=cos Δh sin
Δh
0-sin Δh
cos Δh 00
1x ′y ′z ′
-x ′y ′z ′
= R sin
φsin Δh
R sin φcos Δh -R sin φ R cos φ-R cos φ=D tan φΔh D tan φΔh
2/2 0
(4)
式中,D 为深度,D =R cos φ。
图6 航向角引起的姿态变化示意图
Fig .6 T he Sketch M ap of A ttitude Aroused by Heading
2.2 动态吃水h ds 的影响
动态吃水反映的是船体在垂直方向的瞬时变化。由于多波束换能器与船体捆绑在一起,因而
也随之变化,这种变化仅对波束脚印的深度z
生影响,对于平面位置不产
生影响。h ds 向正,反之为负。波束脚印坐标以及Δh ds 的影响
为:
x =0,y =R sin φ,z =R cos φ-h ds d x =0,y =0,z =Δh ds
(5)
2.3 横摇r 的影响
船体的横摇使得多波束换能器绕x 轴在yoz 面内发生r 角(顺转为负,反之为正)旋转。横摇引起测量断面的变化如图7所示(虚线断面为理想测量断面,实线为实测断面),它使得断面内波束均产生r 角扭动,这样,实际波束入射角便由理想状态下的φ0变化为φ=φ0+
r ,则每个波束脚印在VFS 中的坐标以及r 的测量误差d r 对坐标的影响可表达为式(6)、(7):
x
y z
VFS
= 0R sin (
φ0+r )R cos (φ0+r )VFS
(6)
这种情况下,深度为:
D =R cos (φ0+r )
则
d x d y
d z
VFS
= 0
R cos (φ0+r )d r -R sin (φ0+r )d r VFS
=
0 D d r -D tan φd r
VFS
(7)
根据式(7),横摇误差不会对x 坐标产生任何影响,但对y 和z 坐标产生影响。
2.4 纵摇p 的影响
船体的纵摇使得换能器随之绕y 轴在xoz 面内发生p 角(顺转为负,反之为正)旋转。纵摇引起测量断面的变化如图8所示(虚线断面为理想测量断面,实线为实测断面),它使得理想测量断面同实际测量断面产生一个p 二面角,这样根据式(2)得到的波束脚印坐标仅仅反映的是波束在实测断面中的相对量,而不是真正意义上的VFS 下的坐标。根据图8,波束在VFS 下的坐标以及p 的测量误差d p 对坐标的影响为:
x y z
VFS
=cos p 0sin p 010-sin p 0cos p x ′y ′
z ′VFS
=
R cos φsin p R sin φ
R cos φcos p
VFS
(8)
纵摇情况下,深度D 的计算式为:
D =R cos φcos p
φcos p d 0R cos φsin p 146 武汉大学学报·信息科学版 2001年
D d p 0-D tan p d
p
VFS
(9)
根据式(9),纵摇误差不会对y 坐标产生任何影响,但对x 和z 坐标产生影响。
2.5 姿态测量误差的综合影响
实际测量中,通常是几个姿态因子对船体的综合作用,因而,讨论姿态因子对波束脚印的综合影响是必要的。根据式(4)、(5)、(7)、(9),其综合影响为:
Δx Δy
Δz
VFS
=d x d y
d z
VFS -h
+d x d y
d z
VFS -h
ds
+
d x d y d z
VFS -r
+d x d y
d z
VFS -p
=A B
C
VFS
(10)
A =D tan φΔh +D d p
B =D tan φΔh 2
/2+D d r
C =Δh ds -
D tan φd r -D tan p d p 根据多波束测量原理,就姿态误差在不同条件下对坐标的影响进行统计,结果如表1所示。
1)Δh ds 仅对深度测量产生影响,其影响是直
接的。
2)Δh 、Δp 、Δr 对坐标的影响均与深度D 和自身(或自身的平方)成正比。D 和Δh 、Δp 、Δr
愈大,影响愈显著。
3)Δh 仅对平面坐标x 、y 产生影响,而对深度z 不产生影响。对x 、y 的影响除具有2)的特点外,还与tan φ成正比,其中对x 坐标的影响较大,对y 的影响甚微。
4)Δp 对x 、z 产生影响,对x 的影响大于对z 的影响,随着深度的增加,表现愈显著。
5)Δr 对y 、z 产生影响,在Δp 、Δr 相等的情况下,Δr 对y 的影响等同Δp 对x 的影响;Δr 对
z 的影响较Δp 对z 的影响大得多。
6)从表1可以看出,随着φ的增大,波束越远离中心,测量精度越差。换句话说,因为Δh 、Δp 、Δr 的影响,实测断面是一个不等精度的测量,外缘波束差于内部波束。2.6 Δp 、Δr 极值的确定
根据国际海道组织(IHO )的规定,当水深D <30m 时,总测深误差不应该大于0.3m ;当D >30m 时,总测深误差应该小于0.01D 。这就要求必须根
图7 横摇示意图 图8 纵摇示意图F ig .7 The Sketch M ap of Roll Fig .8 T he Sketch M ap of Pitch
表1 姿态角误差对波束脚印坐标的影响
T ab .1 The Effects of A ttitude Errors for Coordinate of Beam F ootprint
R /m φ/(°)(p ,r )/(°)h /(°)Δ(p ,r ,h )
/(°)Δh ds /m Δz ds /m
h 影响/m Δx Δy r 影响/m Δy Δz p 影响/m Δx Δz 总影响/m
Δx Δy Δz 5015100.020.2
0.2
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.2
100151300.020.20.20.00.00.00.00.00.00.00.00.2200302600.040.20.20.10.00.10.10.10.00.20.10.110003021200.060.20.20.50.00.9-0.60.90.01.40.9-0.420004561500.080.20.22.00.02.0-2.42.0-0.23.92.0-2.450004562100.100.20.2
6.2
0.06.2-7.66.2-0.612.0
6.2
-8.11000060102700.150.20.222.70.013.1-36.013.1-2.335.013.0-38.01500060103300.200.20.245.30.126.2
-72.0
26.2-4.671.026.0
-6.0
20000
60
15
330
0.30
0.2
0.290.7
0.2
52.4-200.0
52.4
-14.0
143.052.0-209.0
147
第2期 赵建虎等:船姿分析及其对多波束测量的影响
据发射波束的个数及波束角大小,决定采用何种测量精度的姿态仪才能满足测量精度的要求。
根据上述统计分析,p 、r 的测量精度只要能
够满足边缘波束的测深精度要求,便可认为满足整个波束的测深精度要求。表2对边缘波束在各种特定情况下的精度进行了统计。
表2 特定情况下Δp 、Δr 对边缘波束z 的影响
Tab .2 T he Effect of Δp ,Δr fo r z of Outside _beam in Special Condition
R /m (r ,p )/(°)D 1/m D 2/m
D 3/m
Δ1
(p ,r )Δ2
(p ,r )Δ3
(p ,r )Δz 1r /D 1Δz 1p /D 1Δz 2r /D 2Δz 2p /D 2Δz 3r /D 3Δz 3p /D 3
5083525130.40.20.060.90.10.90.00.850.010*********.40.20.060.90.10.90.00.850.02008141100520.40.20.060.90.10.90.00.850.010008707500260.4
0.20.06
0.90.1
0.9
0.0
0.85
0.0
20008141410005180.40.20.060.90.10.90.00.850.0500083536250012940.40.20.060.90.10.90.00.850.01000087071500025880.40.20.060.90.10.90.00.850.015000810607750038820.40.20.060.90.10.90.00.850.020000
8
14142
10000
5176
0.4
0.20.06
0.9
0.1
0.9
0.0
0.85
0.0
注:表中的Δz /D 以百分制(%)表示;下标1、2、3分别代表3种情况下的计算量。
表2对最外缘波束入射角分别为45°、60°、75°(三种情况下对应的扇区开角分别为90°、120°、150°),r 、p 为8°(据《海道测量规范》GB12327_1998,规定实测时r 、p 不得大于8°),要求测深误差小于水深1%的情况下计算得到的横摇、纵摇测量精度指标,它们分别为0.4°、0.2°、
0.06°。分析Δp 、Δr 对总测深Δz 的贡献,发现Δz r 占90%以上,Δz p 仅占10%还弱。根据式(7)、(9),可得出如下纵横摇精度指标σp 和σr :
D tan p σp =0.1×(D /100)D tan φσr =0.
9×(D /100)则
σp =0.1/(tan p ×100)σr =0.
9/(tan φ×100)(11)
p 仍取8°,φ分别取45°、60°、75°,则σp 和σr 分别为0.41°和(0.52°、0.30°、0.14°)。考虑影响测深的还有其他因素,故纵、横摇精度指标可取上述数
据的1/3,即0.13°和(0.17°、0.1°、0.05°)。2.7 姿态测量误差对条带拼接的影响及其削弱
多波束是一种条带式测深系统,由于姿态测量误差的影响,实测断面的外部波束精度差于内部波束,势必会导致条带拼接时重叠区地形的不匹配。为了说明这个问题,表3对相邻两个条带中对应断面的几个外部波束进行了统计,见图9。
根据上述结论,姿态测量误差对测深的影响呈现一种系统性,为了解决条带拼接的不匹配问题,削弱姿态对测深的影响,保证条带间地形变化的连续性,可采用航空摄影测量中的相关思想进行平差处理。因为深度不匹配误差Δz 由系统误
差和偶然误差组成,与位置相关,则可表达为x 、
y 的函数f (x 、y )。设重叠区真实地形曲面为z 0,则深度观测方程为:
z =z 0+Δz +ε
Δz =f (x ,y )=a 0+a 1x +a 2x + a 3xy +a 4x 2+a 5y 2
(12)将左、右条带的测深误差Δz 和残差分别表示为f L (x 、y )、v L 和f R (x 、y )、v R ,则
v L -v R =-f L (x ,y )+f R (x ,y )+(z L -z R )V =AX +L (13)
在V T V =min 的情况下,按X =(A T A )-1A T
L 求得系数阵X 后,分别带入f L (x 、y )、f R (x 、y )中,计算各点的Δz 并带入式(12),可很大程度上削弱Δz 的影响(朱庆等,1998)。
图9 相邻条带拼接误差统计图
Fig .9 T he Statistic M ap of Error in Overlapping Area
表3 相邻条带拼接误差统计
T ab .3 T he Statistic of Error in Overlapping Area
D /m φL φR (p ,r )/(°)Δp ,Δr Δz L Δz R 50050-7080.06-0.90.950055-6580.06-1.10.750060-6080.06-1.40.650065-5580.06-1.80.5500
70
-50
8
0.06
-2.5
0.4
148 武汉大学学报·信息科学版 2001年
3 结论和建议
综上所述,可得出如下结论及建议:
1)正确地分析外部扰动因素对船姿的影响,船姿和船姿测量误差对波束脚印坐标的影响,对于保证多波束野外数据采集质量,提高波束位置精度是非常有益的。
2)船姿外部受动因素主要有船速、航偏角、风、流和水深等因素,船姿的变化是它们综合作用的结果。航偏角受控于流速、水深、风力风向和波浪的综合影响,其中流速对航偏角的影响最为显著。影响船体横摇的因素主要有航偏角、横浪、水深和测区河床形状,其中航偏角作用明显;船体速度、航偏角、船型对动态吃水具有一定的影响,船
速的影响较大;一般情况下,纵摇变化量较横摇
小,速度对它的影响最大,其次为航偏角和水深。
参 考 文 献
1 李良雄.差分GPS 水深测量系统延时及其船姿分析:[学位论文].武汉:武汉测绘科技大学,2000
2 朱 庆,李德仁.多波束测深数据的误差分析与处理.武汉测绘科技大学学报,1998,23(1):1~4
3 李德仁.误差处理和可靠性理论.北京:测绘出版社,
1988
4 赵建虎,刘经南,周丰年.GPS 测定船体姿态方法研
究.武汉测绘科技大学学报,2000,25(4):353~357
作者简介:赵建虎,讲师,博士生。现从事GPS 与海洋测量方面的研究。
E _mail :zjh @hpb1.w tusm .edu .cn
The Analysis of Vessel Attitude and the Effect for
Multibeam Echo Sounding
ZH AO J ianhu 1
LIU J ingnan 2
ZHANG Hongmei
3
(1 School of Geodes y and Geomatics ,Wuhan University ,Lyojia Hill ,W uhan ,China ,430072)(2 Presidential Secretariat ,Wuhan University ,129Luoyu Road ,Wuhan China ,430079)
(3 S chool of Pow er and M echanical Engineering ,Wuhan University ,Luoj ia Hill ,Wuhan ,C hina ,430072)
A bstract :The analysis of vessel attitude and the effect of vessel attitude for multibeam echo sound -ing are discussed in this paper .During analyzing the facto rs that affect vessel attitude ,w ind pow -er ,wind direction ,current velocity ,w ater depth ,vessel velocity are thought to be external factors .
The yawing ang le is looked as summ ary effect of wind power ,wind directio n ,current velocity ,w a -ter depth fo r vessel attitude .Yawing angle ,cross w ave ,w ater depth and the shape of sea bed (or river bed )are included in effect factors fo r vessel roll .The disturbed factors for dy namic squat in -cludes m ainly vessel velocity ,yaw ing angle and coefficient of vessel shape .In these factors ,vessel velocity is looked as a key factor .The effect factors for pitch is similar to dy namic squat situation ,and the effect of vessel velocity is direct .In general ,all of these facto rs for roll is larger than for pitch .
With the change of vessel attitude ,the transducer of multibeam echo sounder is changed .The change is produced by roll ,pitch and heading ,so the change must affect the coo rdinate of beam footprint coo rdinate .In this paper ,the solving method used to get attitude effect and effect of atti -tude error for coordinate is given .By calculating and comparing ,some analy ses and researches are done in this paper ,and we get some conclusions .It accords w ith practical surveying .Key words :vessel attitude ;analyses of vessel attitude ;VFS ;LLS
About the author :ZH AO Jian hu ,lecture r ,Ph .D can didate .His research orientations are G PS and hydrography ,etc .E _m ail :zjh @hpb 1.wtusm .edu .cn
149
第2期 赵建虎等:船姿分析及其对多波束测量的影响
远望号测量船
“远望”号测量船 ▲介绍 “远望号”是中国航天远洋测控船队的名称,中国目前拥有6艘远洋测控船,分别命名为远望一号至远望六号。 “远望”号测量船是中国在20世纪70年代研制成功的一艘现代化测量船。“远望”一号建成于1977年8月,“远望”二号建成于1978年9月。该舰舰长190米,宽22.6米,高38.6米,排水量21000吨。 在“远望”号测量船上装备有完善的导航设备和精密的测量系统。它的导航设备除了一般舰船上使用的光学、天文导航设备、惯性导航设备、无线电导航设备外,还装备卫星导航和声呐信标导航设备,从而可以精确测量船位,保证对导弹、卫星、飞船测量的精确。 测量船上的测量系统有雷达跟踪系统,它有一个巨大的抛物面天线,能连续跟踪飞行中的火箭、卫星、飞船;遥测系统也有巨大的抛物面天线,可接收飞船发出的数据信息,并能转发给发射控制中心;VHF语音通信系统,用于飞船与地面控制中心的话音通信,通信系统用于船上各部门间和外界的通信联系、数据传输;数据处理系统用于对各系统测得的数据进行综合处理,传送到发射控制中心。 在“远望”号测量船上装备的多种精密测量系统,可以在预定海域,对进入其测量弧段的导弹、卫星、飞船进行跟踪遥测,并能精确的测定他们的着落点,以便进行回收。 在这次“神六”飞船载人航天试验中。四艘“远望”号测量船分别布阵于太平洋(远望一号,远望二号)、大西洋(远望三号)、印度洋(远望四号)执行对“神
六”飞船的测控任务,正是由于“远望”号测量船装备了完善的导航设备和精密的测量系统才使他们出色、圆满的完成了测控任务。 ★各舰数据 远望一号 远望一号船是我国第一代综合性航天远洋测控船。主要担负卫星、飞船和火箭飞行器全程飞行试验测量和控制任务。远望一号船于1977年8月31日在江南造船厂建成下水,船总长191米,船宽22.6米,船高38米,平均吃水7.5米,满载排水量21157吨。1978年部队正式组建,25年来,船先后30次远征大洋,总航程20.8万余海里,累计航时17376.1小时,出海总天数1166天,圆满完成了我国洲际导弹、潜射导弹、通信卫星、气象卫星、导航定位卫星和“神舟”号飞船以及澳星、亚太二号、菲律宾星等34次重大科研试验任务。 远望二号 远望二号船是我国第一代综合性航天远洋测控船,主要承担我国航天飞行器的海上测量、控制、通信和打捞回收任务,是我国航天测控网的重要组成部分。船长192米,宽22.6米,高38.5米,满载排水量2.1万吨,最大行速20节,续航100天。远望二号船组建于1978年,20多年来,先后25次远征大洋,总航程30余万海里,累计海上作业时间1826天,先后27次圆满完成了亚洲一号、东方红三号、风云二号、烽火一号等卫星和神舟号试验飞船的重大海上测控任务。远望三号 远望三号船是我国第二代综合性航天远洋测控船,主要担负卫星、飞船和其他航天器全程飞行试验海上测量和控制任务。全船集中了20世纪九十年代科学技术精华,汇集了我国当今船舶、机械、电子、气象、通信、计算机等方面的先
密封件行业发展分析报告
密封件行业发展分析报告 近年来,国家对液气密行业的技术引进、技术改造、科研开发等给予了一定的支持,推动了行业的快速发展。我国农业、水利、能源、交通等产业的发展较快,为此需要大量机械装备以满足其发展的需要。随着工业化和自动化水平的提高,这些装备需要配套大量的高性能和高可靠性的液压气动和密封元件。 行业现状值得乐观 密封行业构成总体来说,形成了国企、民企、三资"三足鼎立"的局面,产值基本上各占三分之一。国有企业正加大改革力度;大量民企迅速崛起;外资大量进入,世界各大著名公司基本都在中国开展合资、独资、销售等业务,呈现"制造业向中国转移"的态势。 在技术水平上,国企主导产品是以80年代引进和跟踪开发为主,基本是国际中档水平;民企大多以中低档产品为主,但资金积累迅速,利用国内已有技术,聚集富有经验的人才,技术水平进步较快,其产品质量、品种与服务在竞争中不断提高;外资企业以中高档产品为主,技术水平与国外相当,为境内合资、独资企业所需高档主机和重点工程提供配套。 随着我国经济的迅猛发展,各类机械装备采用液压、气动实现传动与控制日益增长,对密封技术要求日益提高。我国流体动力产品市场发展迅速,除美、欧、日外,在发展中国家名列第一位。华尔卡我国进口也在增多,而且市场发展潜力很大。 后市发展潜力巨大 随着工业化和自动化水平的提高,机械装备需要配套大量的高性能和高可靠性的液压气动和密封元件。初步测算,预计今年国内对液压、液力、气动、密封产品需求总额,将由2005年的200亿元增至约350亿元。其中,液压产品由100多亿元增至200亿元,液力产品由10多亿元增至20多亿元,气动产品由近30亿元增至50多亿元,密封产品由30多亿元增至70亿元。 国家各项基础设施和基础工业建设蓬勃发展;除了长江三峡、南水北调、西气东输、西电东送、青藏铁路等世纪性工程建设外,还有一大批大型煤矿、油田、露天铁矿、电站、机场、港口、高速铁路、高等级公路等重点工程,以及大量的城市建设和住宅建设等。为此,土石方装卸工作量的不断增加,加上物流现代化集运的发展,以及新工艺、新技术和新材料的应用,将使国内工程机械需求量长期保持增长态势。 据有关预计,到2010年液压挖掘机年需求量约达6万台,推土机(120马力以上)近万台,装载机约10万台,平地机约2000台,压路机约1.5万台,工程起重机约2万台,叉车约8万台,水泥搅拌车近万台。此外,我国现拥有工程机械约140万台,预计到今年将达到200万台。另悉,每年为国产和合资生产的挖掘机、道路机械、建设机械、桩工机械、水泥搅拌车等配套所进口的液压件,约达1.5亿美元以上。总之,上述产品需要大量的高压柱塞泵,高压齿轮泵,大扭矩马达,车轮马达,多路阀、油缸,管件、管路总成和滤油器等,为工程机械配套、维修用液压和密封件的市场将面临大发展的新时期。
苜蓿草销售工作总结
苜蓿草销售工作总结 篇一:国产苜蓿草购销合同书 饲草料买卖合同书 购货单位(以下简称甲方):供货单位(以下简称乙方)为了增强双方的责任感,明确双方权利和义务,确保双方各自的经济利益,根据《中华人民共和国合同法》和相关法律法规的规定,经甲乙双方充分协商,甲方就购置乙方饲草料草一事达成如下协议,以便共同遵守: 一、供货名称、价格以及数量: 1、货物名称:饲草料 2、货物价格:签订合同时,饲草料价格为元/吨(注:以上报价均为到门价,乙方负责找车送到甲方指定地点)。 4、供货数量:吨左右。 二、饲草料草质量标准: 质量标准:水份≤20%,杂草≤10%,蛋白≥16%,感官新鲜,无霉变,无泥沙。 三、交货地点、运输方式及联系人: 1、交货地点: 2、运输方式:汽运 3、接货单位联系人: 五、交接货期限:
XX年月日至XX年月日。 六、验收方式及计算方式: 饲草料到达甲方交货地点后,由甲方组织工作人员按标准验收,验收合格后,开据验收合格单,进行过秤称重。 计算方式:经甲乙双方协商,乙方将饲草料运到甲方指定地点,在甲方场内进行过称按实际净重计算重量。在合同执行期间,甲方在收到一批货物计量后,必须及时与乙方核对重量。 七、付款方式: 1、每月对帐一次,对帐无误的,乙方开具正规发票,将发票与盖章确认的对帐单一同送到甲方,票到验收合格后,7个工作日内付清上月货款。 2、最后结算付款时间:乙方提供剩余饲草料的正规发票,甲方在10个工作日内结清剩余饲草料款。 八、本合同一式两份,甲乙双方各执一份,双方签字、盖章后生效。 甲方:乙方: 法人代表(签字):法人代表(签字): 联系电话;联系电话: 篇二:XX年中国苜蓿草市场分析预测报告 XX-2020年中国苜蓿草市场分析预
中国航天有关资料
中国航天有关资料 相关内容 1956年10月8日,我国第一个火箭导弹研制机构——国防部第五研究院成立,钱学森任院长。1958年4月,开始兴建我国第一个运载火箭发射场。 1964年7月19日,我国第一枚内载小白鼠的生物火箭在安徽广德发射成功,我国的空间科学探测迈出了第一步。 1968年4月1日,我国航天医学工程研究所成立,开始选训航天员和进行载人航天医学工程研究。 1970年4月24日,随着第一颗人造地球卫星“东方红”1号在酒泉发射成功,我国成为世界上第5个发射卫星的国家。 1975年11月26日,首颗返回式卫星发射成功,3天后顺利返回,我国成为世界上第3个掌握卫星返回技术的国家。2005年是我国返回式卫星成功发射30周年,截至9月,我国已经成功发射22颗返回式卫星。利用返回式卫星开展的科学试验成果,已在国民经济发展的很多领域广泛运用。
1979年,远望1号航天测量船建成并投入使用,我国成为世界上第4个拥有远洋航天测量船的国家。目前我国已形成先进的陆海基航天测控网,由北京航天飞行控制中心、西安卫星测控中心、陆地测控站、4艘远望号远洋航天测量船以及连接它们的通信网组成,技术达到了世界先进水平。 1985年,我国正式宣布将长征系列运载火箭投入国际商业发射市场。1990年4月7日,长征三号运载火箭成功发射美国研制的“亚洲一号”卫星,截至目前已将27颗国外制造的卫星成功送入太空,我国在国际商业卫星发射服务市场中占有了一席之地。 1990年7月16日,长征2号捆绑式火箭首次在西昌发射成功,其低轨道运载能力达9.2吨,为发射载人航天器打下了基础。 1990年10月,载着两只小白鼠和其他生物的卫星升上太空,开始了我国首次携带高等动物的空间轨道飞行试验。试验的圆满成功,为我国载人航天器生命保障系统的设计以及长期载人太空飞行获得了许多宝贵数据。 1992年,我国载人飞船正式列入国家计划进行研制,这项工程后来被定名为神舟号飞船载人航天工程。神舟号飞船载人航天工程由神舟号载人飞船系统、长征运载火箭系统、酒泉卫星发射中
2018年汽车密封件行业分析报告
2018年汽车密封件行业分析报告 2018年9月
目录 一、行业主管部门、监管体制、主要法律法规及政策 (5) 1、行业主管部门及监管体制 (5) (1)行业主管部门 (5) (2)行业自律组织 (5) (3)行业认证标准 (5) 2、主要法律法规及产业政策 (6) 二、行业发展现状与趋势 (7) 1、我国汽车行业 (7) (1)我国已连续九年蝉联世界第一产销大国 (7) (2)乘用车市场是消费主力 (10) (3)我国汽车市场自主品牌发展势头十分强劲 (11) (4)新能源汽车冲击燃油车市场,环保化成为趋势 (12) 2、我国汽车零部件行业 (14) (1)相对于整车产业,我国汽车零部件产业具有较大成长空间 (14) (2)资源整合与兼并收购成为发展趋势 (14) (3)汽车零部件本土化 (15) 3、我国汽车密封件行业 (16) (1)市场规模 (16) (2)自主品牌车企的异军突起带动了本土汽车密封条企业的快速发展 (16) (3)技术特点 (17) (4)未来趋势 (17) 三、行业竞争格局和市场化程度 (18) 1、外资/合资厂商 (18) (1)申雅密封件有限公司 (18) (2)瀚德(中国)汽车密封系统有限公司 (19) (3)鬼怒川橡塑(广州)有限公司 (19) (4)福州福光橡塑有限公司 (20)
(5)北京威卡威汽车零部件股份有限公司 (20) (6)上海西川密封件有限公司 (20) (7)丰田合成星光(天津)汽车部品有限公司 (21) (8)和承汽车配件(太仓)有限公司 (21) (9)上海红阳密封件有限公司 (21) 2、国内自主厂商 (22) (1)浙江仙通橡塑股份有限公司 (22) (2)江阴海达橡塑股份有限公司 (22) (3)贵州贵航汽车零部件股份有限公司 (22) (4)安徽中鼎密封件股份有限公司 (23) (5)建新赵氏集团有限公司 (23) 四、影响行业发展的因素 (24) 1、有利因素 (24) (1)国家政策大力支持发展汽车整车行业和零部件生产行业 (24) (2)下游客户需求量提高,汽车整车行业业绩上升 (24) (3)经济全球化发展和汽车零配件国产化趋势 (25) 2、不利因素 (25) (1)环保标准提升,橡塑原料要求提升 (25) (2)汽车行业技术难度升高,受制于下游客户发展 (26) (3)成本控制难度大,竞争激烈 (26) 五、进入行业的主要障碍 (26) 1、技术壁垒 (26) 2、成本控制壁垒 (27) 3、资金壁垒 (27) 4、客户认证壁垒 (28) 六、行业周期性、区域性、季节性特征 (28) 1、周期性 (28) 2、区域性 (29)
中国苜蓿草行业研究分析报告
2016年中国苜蓿草行业研究分析报告 一、苜蓿草相关概述 苜蓿草是苜蓿属植物的通称。苜蓿属豆科牧草,是世界上种植最早的牧草之一,不仅富含粗蛋白及多种维生素和微量元素,而且还含有一些未知生长因子,适口性好,营养价值高。 苜蓿中含有丰富的蛋白质,初花期至花期的含量一般在17%~20%,粗脂肪含量大多在2%~3%。开花前,粗纤维和无氮浸出物在苜蓿干物质中的含量为30%左右,开花期即达35%以上,粗灰分含量一般都在10%左右,其中,钙为1.5%,磷为0.1%~0.3%。苜蓿中含有丰富的维生素和微量元素。微量元素中有畜禽必需的铁、铜、锰、锌、钴和硒,其中,铁、锰含量较多。紫花苜蓿维生素含量丰富,含胡萝卜素18.8~161毫克/千克、VC210毫克/千克、VB5~6毫克/千克、VK150~200毫克/千克。 将苜蓿草添加到牲畜的饲料中,会对畜禽生长发育具有显着的促进作用,尤其是能提高奶牛的产奶量和品质,促进奶业的发展。苜蓿草还有显着的改善环境的效力,能够有效改善盐碱化和沙化土地,具有水土保持、提高土质等生态功能,具有非常大的生态价值,被称为“牧草之王”。 二、中国苜蓿草市场发展现状 长期以来,政府一直重视苜蓿产业的可持续发展,国家“振兴奶业计划”政策中,对苜蓿草产业给予了大力度的支持,对3000亩以上规模化种植基地,仅财政补贴一项即达600元/亩。农业部具体实施奶业苜蓿振兴计划以来,全国累计支持种植苜蓿150万亩,年产商品苜蓿100万t,我国苜蓿种植面积和商品产量已初具规模。应该说,如此强大的政策支持,对近几年苜蓿产业的发展,起到了极大的刺激与促进作用,苜蓿基地建设蓬勃发展,大面积的苜蓿种植区不断涌现。国内苜蓿种植区域主要是甘肃、内蒙古、陕西等地,甘肃省苜蓿留床面积达到994万亩,居全国第一。内蒙古人工苜蓿草地面积888万亩,位居全国第二位。 虽然国内苜蓿产量有所提高,但是在质量上与美国等国家还是存在很大差距,导致我国优质苜蓿始终处于依赖进口的状态。预期中国高端苜蓿草依赖美国的局面还将持续一段时期,但随着中国苜蓿产业在发展规模、整体素质、经营模式等方面的持续快速发展,最终还是主要依靠国内解决优质牧草短缺问题。 三、中国苜蓿草生产情况 据调查,目前国内种植苜蓿的主体大致可化为5种形式:第一种形式,是分散的农户,自家种植用来养畜,自产自用;第二种形式,是牧区的牧户,利用人工草场,补饲牲畜;第三种形式,是牧草生产企业,种植的苜蓿全部用于商品销售;第四种形式,是奶农专业合作社和各类牧场,种植苜蓿主要用于饲喂奶牛;第五种形式,是农垦系统的大型农场,设施及管理条件优越,基木形成生产、加工、销售一体化的经营模式。苜蓿草的种植形式导致大部分苜蓿草并不会进入流通市场。
浅谈影响多波束测深系统数据质量的几个问题
浅谈影响多波束测深系统数据质量的几个问题 为了为海图的数字化管理及更新提供高精度的数据,在多波束测深系统的应用过程中,正确设置并校正其各个设备之间的安装误差显得尤为重要。通过不断的实践,本文总结了影响多波束测深精度的几个问题,并采用正确的校正方法得以解决,确保数据质量。 标签:GPS延时纵摇偏差横摇偏差艏摇偏差 0 引言 目前多波束系统正逐渐普及,并在海上油田井场调查、航道疏浚、港口测量、大陆架经济区勘测等领域得到广泛应用,可以进行高精度、全覆盖水深测量,实现了由线到面的飞跃。多波束测深系统连接设备比单波束测深要多并复杂,一套多波束系统由多种设备或传感器组成,为了得到真实世界中精确的三维水深坐标必须考虑各设备间的安装误差,并通过不同校正方法改正其姿态。本文以多波束SeaBat 8125和软件PDS2000为例,总结了影响其测深精度的几个问题。 1 多波束系统主要组成 ①RESON SeaBat 8125:频率:455kHz;测深分辨率:6mm;覆盖角度:120°;最大测深范围:120m;波束数:240;沿航线波束角:1°;垂直航线波束角:0.5°;最大船速:12节;最大发射速率:40次/秒。②OCTANS光电罗经、运动传感器:真北方位精度:0.1 °;稳定时间:5分钟;纵横摇分辨率:0.01°;升沉精度:5%。③GPS信标机④PDS2000数据采集软件⑤HY1200声速剖面仪。 2 影响系统精度的几个问题及采用措施和校正方法 水中的声速:海洋中各处的声速都可能不一样,它取决于以下三个参数:盐度变1ppt=声速约变1.3m/s;温度变1°C=声速约变3 m/s。压力:165米深度变化的影响相当于温度变1°C。针对参数,使用hy1200声速剖面仪测前和测后两次测量水中声速,并将声速曲线应用到数据后处理中。背景噪声:在测量过程中,由于声纳、船体电子、气泡断裂、螺旋桨和发动机引起的自身噪声一般可以控制,而其他声源如波浪、潮汐、流速、地震、海洋生物和其它船只引起的环境噪声,一般不可控制。在自身噪声控制中,可以采取以下措施:①在换能器上安装导流罩,设计流体型船体形状,改变声纳头到船壳的高度等,可使水流气泡的影响最小化。②仔细选择声纳头安装位置,远离船主机、副机、泵和螺旋桨,并保证声纳杆舷侧安装稳定牢固,超出船底。③增益的选择:当水深小于等于5米时,可以使用固定增益;当水深大于5米时,采用TVG自动增益。TVG的确定主要取决于Absorption和Spreading Loss两个主要参数,在干净的淡水中,或者在海底具有很好的反射体的水中时,两个参数设置通常较低,反之,较高。校正:在进行多波束校正之前,首先选择良好的海况和特定的海底地形(有明显水深变化如航道和港池的边坡)上采集数据,安装一次就要校正一次,当更换设备或改变传感器位置时都需要重新校正。多波束校正
航天技术专业名词中英文对照表
航天技术专业名词中英文对照表 安全性safety 拜科努尔发射场Байконуркосмодром 备用着陆场alternate landing site 舱外活动extravehicular activity 测地卫星geodetic satellite 测控通信网communication network for tracking, telemetering and control system 测量飞机instrumentation aircraft 超重医学hypergravity medicine 乘员舱大气环境crew cabin atmosphere environment 冲压式发动机ramjet engine 重复使用运载火箭reusable launch vehicle 垂直起降火箭vertical lift off and vertical landing rocket 磁环境试验magnetism environment test 单级入轨火箭single stage to orbit rocket 单组元火箭发动机mono propellant rocket engine 导航卫星navigation satellite 导航卫星系统navigation satellite system “导航星”全球定位系统Navstar global positioning system,GPS 登月舱lunar module
等效性原理的卫星试验satellite test of the equivalence principle,STEP 低轨道low earth orbit 低轨道运载火箭low earth orbit launch vehicle 地面模拟飞行试验ground simulated flight test 地球辐射带radiation belts of earth 地球观测系统Earth Observing System,EOS 地球同步轨道geosynchronous orbit 地球信息系统Earth Observation System Data and Information System,EOSDIS 地球资源卫星earth resources satellite 地外文明extraterrestrial civilization 电磁相容性试验electromagnetic compatibility test 电弧加热设备arc heater 电火箭发动机electric rocket engine 动力学环境试验dynamics environment test 对地观测技术earth observation technique 多级入轨火箭multi-stage to-orbit rocket 俄罗斯航天测控网Russian spacecraft tracking, telemetering and control network 俄罗斯全球导航卫星系统Russian global navigation satellite system,GLONASS
标准密封件项目可行性研究报告
标准密封件项目 可行性研究报告 xxx科技公司
标准密封件项目可行性研究报告目录 第一章总论 第二章项目建设必要性分析 第三章市场调研分析 第四章产品规划方案 第五章项目选址方案 第六章土建工程 第七章项目工艺先进性 第八章项目环境保护分析 第九章安全卫生 第十章项目风险应对说明 第十一章项目节能方案分析 第十二章进度方案 第十三章项目投资计划方案 第十四章经济效益可行性 第十五章招标方案 第十六章综合评价
第一章总论 一、项目承办单位基本情况 (一)公司名称 xxx科技公司 (二)公司简介 公司是一家集研发、生产、销售为一体的高新技术企业,专注于产品,致力于产品的设计与开发,各种生产流水线工艺的自动化智能化改造,为 客户设计开发各种产品生产线。 公司坚持以市场需求为导向、以科技创新为中心,在品牌建设方面不 断努力。先后获得国家级高新技术企业等资质荣。 公司生产运营过程中,始终坚持以效益为中心,突出业绩导向,全面 推行内部市场化运作模式,不断健全完善全面预算管理体系及考评机制, 把全面预算管理贯穿于生产经营活动的各个环节。通过强化预算执行过程 管控和绩效考核,对生产经营过程实施全方位精细化管理,有效控制了产 品生产成本;着力推进生产控制自动化与经营管理信息化的深度融合,提 高了生产和管理效率,优化了员工配置,降低了人力资源成本;坚持问题 导向,不断优化工艺技术指标,强化技术攻关,积极推广应用新技术、新 工艺、新材料、新装备,原料转化率稳步提高,降低了原料成本及能源消耗,产品成本优势明显。
(三)公司经济效益分析 上一年度,xxx(集团)有限公司实现营业收入22662.29万元,同比增长15.25%(2998.12万元)。其中,主营业业务标准密封件生产及销售收入为18833.86万元,占营业总收入的83.11%。 根据初步统计测算,公司实现利润总额6334.23万元,较去年同期相比增长989.93万元,增长率18.52%;实现净利润4750.67万元,较去年同期相比增长886.29万元,增长率22.93%。 上年度主要经济指标
苜蓿草市场分析实施报告
苜蓿草市场分析报告 一、全球苜蓿草产量 全球苜蓿干草产量1.38亿吨(2014年),其中北美洲6333万吨,南美洲2755万吨,欧洲3277万吨,亚洲628万吨,大洋洲666万吨,非洲136万吨。 前十位苜蓿种植是美国(36%)、中国(15%)、阿根廷、俄罗斯、意大利、加拿大、法国、澳大利亚、匈牙利和保加利亚。 全球苜蓿草生产类型主要有苜蓿风干草捆、苜蓿脱水草捆、苜蓿青贮、苜蓿草颗粒等。 苜蓿草草捆苜蓿草颗粒 二、全球苜蓿草进出口量 2016年全球苜蓿草进出口量为850万吨,其中出口量为600万吨,进口量为250万吨;主要出口国:美国、西班牙、加拿大、吉尔吉斯斯坦、哈萨克斯坦、保加利亚。主要进口国和地区:中国、日本、沙特、阿联酋、国、。 苜蓿草主产国大部分自用,出口量占产量的比例不大,如美国仅有不到5%产量的苜蓿草用来出口。 三、中国苜蓿草进口 中国海关获得数据统计,2016年中国进口苜蓿草总计146.31万吨,相比2015年的121.36万吨增加20.57%;进口金额总计44998.40万美元,同比下降4.00%;全年平均到岸价为307.55美元/吨,同比下降20.38%。
从2013年到2016年,中国进口苜蓿的变化趋势是:总量逐年提升,增幅逐年放大; 美国苜蓿的比例在下降,西班牙的苜蓿比例在上升。 国产苜蓿的质量不稳定,一级或特级苜蓿草的产量重不足,目前高品质苜蓿市场还依赖于进口。 四、中国苜蓿草产业 2015年,中国苜蓿草产量418.2万吨,进口121万吨,需求量538万吨,供需基本平衡。 分析我国牧草市场的供求形势,劣质牧草供大于求,而苜蓿等优质牧草却供不应求。 一级苜蓿很少,大多为二级苜蓿草。质量较好的省份在和。由于农民收购价的提高,苜蓿出场价普遍提高,一、二级苜蓿在2100-2300元/吨,在2200-2400元/吨。但是,的苜蓿数量很有限,基本在本地消化了,还需大量从调购。目前,是苜蓿贮存最多的省份,其次是,多奶牛场已选用国产苜蓿予以降低饲养成本。 我国苜蓿草产业发展主要分为四个阶段: 第一阶段是传统阶段,即我国一直存在的农民自产自用的生产式,此式非常稳定但从未进入商品草市场。
多波束勘测系统工作基础学习知识原理及其结构
第二章多波束勘测系统工作原理及结构 多波束系统是70年代兴起、80年代中、末期又得到飞速发展的一项全新的海底地形精密勘测技术。它是当前兴趣的焦点,因为它既有条带测深数据,又同时可获取反映底质属性的回波强度数据(Laurent Hellequin et al.,2003)。该技术采取广角度定向发射和多通道信息接收,获得水下高密度具有上百个波束的条幅式海底地形数据,彻底改变了传统测深技术概念,使测深原理、勘测方法、外围设备和数据处理技术诸方面都发生了巨大变化,大大提高了海底地形勘测的精度、分辨率和工作效率,实现了测深技术史上的一次革命性突破(李家彪等,2000)。多波束系统的工作原理与传统的单波束回声测深仪工作原理类似,都是根据声波在水下往返传播的时间与声速的乘积得到距离,从而得到水深。不同的是单波束测深仪一般采用较宽的发射波束(8°左右)向船底垂直发射,声传播路径不会发生弯曲,来回的路径最短,能量衰减很小,通过对回声信号的幅度检测确定信号往返传播的时间,再根据声波在水介质中的平均传播速度计算测量水深。在多波束系统中,换能器配置有一个或者多个换能器单元的阵列,通过控制不同单元的相位,形成多个具有不同指向角的波束,通常只发射一个波束而在接收时形成多个波束。除换能器天底波束外,外缘波束随着入射角的增加,波束在倾斜穿过水层时会发生折射,同时由于多波束沿航迹方向采用较窄的波束角而在垂直航迹方向采用较宽的覆盖角,要获得整个测幅上精确的水深和位置,必须要精确地知道测量区域水柱的声速剖面和波束在发射和接收时船的姿态和船艏向。因此,多波束测深在系统组成和测量时比单波束测深仪要复杂得多(周兴华等,1999)。 §2.1 多波束勘测系统的工作原理 2.1.1 单波束的形成 2.1.1.1 发射阵和波束的形成 一个单波束在水中发射后,是球形等幅度传播,所以方向上的声能相等。这种均匀传播称为各向同性传播(isotropic expansion),发射阵也叫各向同性源(isotropic source)。例如,一个小石头扔进池塘时就是这种情况,如图2.7所示。
关于印发渔业船舶安全生产应急救援预案和渔船安全事故应急救援处置
关于印发渔业船舶安全生产应急救援预案和渔船安全事故应急救援处 置 Document number:BGCG-0857-BTDO-0089-2022
涪李办发〔2009〕68号 涪陵区李渡街道办事处 关于印发渔业船舶安全生产应急救援预案和 渔船安全事故应急救援处置工作预案的通知 李渡、马鞍、金银、致韩、石龙片区办事处、有关村(居)委、街道有关部门、辖区各渔业船舶业主; 现将《李渡街道渔业船舶安全生产应急救援预案》和《李渡街道渔业安全事故应急救援处置工作预案》印发给你们,请认真贯彻执行。 二○○九年三月二十八日
涪陵区李渡街道 渔业船舶安全生产应急救援预案 为切实保障全镇渔船和船员的生命及财产安全,防止渔船生产安全事故的发生,及时妥善处置渔业船舶生产安全事故,在事故发生后能迅速有效地展开组织救援工作,采取有效的措施,消除、减少事故危害和防止事故恶化,最大限度降低事故损失,本着“预防为先、自救为主、统一指挥、分工负责”的原则,结合我街道渔业安全生产工作实际,依据《中华人民共和国安全生产法》、市区渔业船舶生产安全工作方面的法规和文件精神,特制定本预案。 一、指导思想 全力以赴,紧急救援,将渔业船舶生产安全事故造成的人员伤亡和财产损失以及产生的不利影响降到最低程度。 二、适用范围 本预案适用于李渡街道辖区境内渔业船舶发生的生产安全事故。 三、组织机构及职责 (一)成立渔业船舶生产安全重特大事故应急救援工作领导小组。组长由办事处主任担任,副组长由分管安全领导和分管农业副主任担任;成员由街道安监所和农业服务中心人员组成。应急救援工作领导小组根据工作需要下设事故调查组、事故处置组和后勤保障组等工作小组。 应急救援领导小组 组长:郑文宇
金属密封件项目投资分析报告
金属密封件项目投资分析报告 规划设计/投资方案/产业运营
金属密封件项目投资分析报告 金属密封件制造,是指以金属为原料制作密封件的生产活动。改革开放以来,我国金属密封件制造行业取得了长足的发展,目前已经完全发展成为一个竞争性的行业。密封件行业产品与众多大工业配套使用,无论航空、航海、石油、化工,还是机械、发电、冶金、矿山等,均离不开密封件。所以密封件行业虽小,但牵涉的面却很广。密封件行业发展至今,已经从当年的小作坊、主机厂的车间或分厂发展壮大成为基本可以满足中国各种装备的要求了。目前,在密封件制造业中,金属密封件占主导位置,市场份额过半,达到71%。 该金属密封件项目计划总投资10341.53万元,其中:固定资产投资7381.74万元,占项目总投资的71.38%;流动资金2959.79万元,占项目总投资的28.62%。 达产年营业收入20444.00万元,总成本费用15805.59万元,税金及附加194.73万元,利润总额4638.41万元,利税总额5472.92万元,税后净利润3478.81万元,达产年纳税总额1994.11万元;达产年投资利润率44.85%,投资利税率52.92%,投资回报率33.64%,全部投资回收期4.47年,提供就业职位381个。
报告依据国家产业发展政策和有关部门的行业发展规划以及项目承办 单位的实际情况,按照项目的建设要求,对项目的实施在技术、经济、社 会和环境保护、安全生产等领域的科学性、合理性和可行性进行研究论证;本报告通过对项目进行技术化和经济化比较和分析,阐述投资项目的市场 必要性、技术可行性与经济合理性。 ......
多波束天线通道幅相一致性校正及实现(精)
多波束天线通道幅相一致性校正及实现 朱丽龚文斌杨根庆 (中科院上海微系统与信息技术研究所,上海 200050) 摘要:本文针对多波束天线接收机的通道幅相一致性校正,提出了一种基于自适应算法的校正方法并在FPGA 中实现了该方法。在满足系统要求的前提下,该方法不但实现起来相对容易,而且算法的精度和动态范围也有一定的保证。仿真和试验结果表明,该方法是可行的。关键词:多波束天线,通道失衡,幅相误差,最小均方误差,校正 1.引言 随着人们对卫星通信要求的不断提高,卫星通信技术得到了很大的发展。其中,卫星多波束天线目前己成为提高卫星通信性能、降低系统成本的一项关键性技术。 多通道接收机是DBF 天线系统中信号的必经之路,正是这种多接收通道的结构,使DBF 天线系统增加了幅度和相位误差的潜在来源。与多个天线阵列相连接的多个接收机通道必须要有很高的一致性,否则通道间的失配将严重影响数字波束系统的性能。对多通道间误差的校正正是星载数字多波束天线的关键技术之一。由于目前国内对星载DBF 天线的研究还处于初级阶段,所以需要更多的借鉴智能天线、自适应天线和雷达等领域已有的研究成果。 本文主要针对基于卫星应用的两维阵列DBF 天线系统,采用目前最常用的LMS 算法设计并在FPGA 中实现了对其前端射频多通道接收机的幅相校正系统,最后给出了测试结果。测试结果表明,这种采用定点数制的LMS 算法对系统的幅相误差具有较好的校正性能。 2.数字多波束天线的幅相校正原理
数字多波束天线的组成如图1所示。前端天线阵是由多个天线单元组成两维阵列,阵元接收的信号经射频前端电路、A/ D 转换电路、数字下变频器后送入数字波束形成器处理。[2][1] 设计一个六边形排列的7单元天线阵,A/D后端的数字下变频器和波束形成器均采用FPGA 实现。天线阵接收到的信号首先通过射频通道混频后得到中频信号,再将此模拟中频信号经过ADC 后得到数字中频信号,然后送入DDC 进行下变频;下变频后,每路信号分为正交的I、Q 两路,这些正交的信号再送入波束成形器中进行波束成形,最后的输出即为合成的波束。接收通道在制造时的各种误差、电路器件的选择,A/D的量化精度、DDC 的性能、I/Q两路的正交误差等因素都会引起信号幅度和相位的变化。为了能够正确的波束成形,达到系统的精度要求,就必须要对多通道接收机进行校正,校正系统原理图如下图2 所示。
第四章船舶安全应急处理
第一节船舶搁浅、碰撞后的应急安全措施 一、船舶搁浅后的应急安全措施 1.应急处理 船舶发生搁浅、擦底时,轮机部应采取下列应急处理措施: 1)轮机长迅速进入机舱,主机进入备车运行状态。 2)主机降速运行。船舶进入浅水区,因为船舶阻力增加,主机转速下降,或者在全制式调速器作用下会自动增加油门使柴油机超负荷运行,所以当值班轮机员发现主机转速和功率变化异常时,应考虑到搁浅的可能,主动向驾驶台联系询问情况,并采取降速措施。 3)使用机动操纵转速。搁浅后,无论驾驶台采取冲滩或退滩措施,机舱所给车速都应使用机动操纵转速或系泊试验转速,防止主机超负荷。 4)换用高位海底门。搁浅时值班轮机员应立即将低位海底门换为高位海底门,防止海水泵吸入泥沙,堵塞海水滤器。 5)清洗海水滤器。换用高位海底阀后,如果发现海水压力仍然较低,可清洗海水总管的海水滤器和海水泵前的滤器,清除积存的泥沙;或立即换用另一舷的高位海底阀。如不及时换用另一舷侧的高位海底阀和清洗海水滤器,可能发生海水低压报警,冷却系统无法工作,使主机不能正常运行,甚至发电机因高温而停止工作。 2.轴系检查 搁浅可能引起船体变形,造成柴油机轴系中心线的弯曲,影响柴油机运转,所以船舶搁浅后必须检查轴系的情况。判断轴系状态可用下列方法: 1) 盘车检查。停车后为判断轴系是否正常,船尾部搁浅时可用盘车机盘车检查,检查轴系运转是否受阻,查看盘车机电流的变化情况是否正常。 2) 柴油机运转时的检查: (1)检查中间轴承和尾轴的温度; (2)检查中间轴和尾轴是否跳动; (3)检查中间轴承地脚螺栓情况; (4)检查曲轴箱的温度; (5)检查齿轮箱的声音是否正常。 3)柴油机曲轴臂距差的测量。搁浅后应尽快创造条件测量曲轴臂距差,通过曲轴臂距差来判断曲轴中心线的变化和船体的变形,决定脱险后主机是否正常运行或减速运行。 3.双层底舱柜的检查 搁浅时双层底舱柜可能变形破裂,要注意检查和测量各舱柜的液位变化,注意海面有无油花漂浮等,井做好机舱排水准备工作。检查的主要内容是: 1) 连续检查主机滑油循环柜的液位; 2) 测量干隔舱、油水舱等双层底舱柜,如有漏水可将测量管和透气管的管口封死,从而减缓进水速度和减少进水量。
2016-2020年中国机械密封件市场深度调研及投资战略咨询报告
机械密封件 市场深度调研及投资战略咨询报告 2016-2020
核心内容提要 产业链(Industry Chain) 狭义产业链是指从原材料一直到终端产品制造的各生产部门的完整链条,主要面向具体生产制造环节; 广义产业链则是在面向生产的狭义产业链基础上尽可能地向上下游拓展延伸。产业链向上游延伸一般使得产业链进入到基础产业环节和技术研发环节,向下游拓展则进入到市场拓展环节。产业链的实质就是不同产业的企业之间的关联,而这种产业关联的实质则是各产业中的企业之间的供给与需求的关系。 市场规模(Market Size) 市场规模(Market Size),即市场容量,本报告里,指的是目标产品或行业的整体规模,通常用产值、产量、消费量、消费额等指标来体现市场规模。千讯咨询对市场规模的研究,不仅要对过去五年的市场规模进行调研摸底,同时还要对未来五年行业市场规模进行预测分析,市场规模大小可能直接决定企业对新产品设计开发的投资规模;此外,市场规模的同比增长速度,能够充分反应行业的成长性,如果一个产品或行业处在高速成长期,是非常值得企业关注和投资的。本报告的第三章对手工工具行业的市场规模和同比增速有非常详细数据和文字描述。 消费结构(consumption structure) 消费结构是指被消费的产品或服务的构成成份,本报告主要从三个角度来研究消费结构,即:产品结构、用户结构、区域结构。1、产品结构,主要研究各类细分产品或服务的消费情况,以及细分产品或服务的规模在整个市场规模中的占比;2、用户结构,主要研究产品或服务都销售给哪些用户群体了,以及各类用户群体的消费规模在整个市场规模中的占比;3、区域结构,主要研究产品或服务都销售到哪些重点地区了,以及某些重点区域市场的消费规模在整个市场规模中的占比。对消费结构的研究,有助于企业更为精准的把握目标客户和细分市场,从而调整产品结构,更好地服务客户和应对市场竞争。
中国牧草市场现状与投资前景评估报告
中国牧草市场现状与投资前景评估报 告
在畜牧业生产发达国家,牧草属于作物生产的重要组成部分,在农业生产中占据重要地位。美国在20世纪50年代就将紫花苜蓿列入战略物资名录,草产业已成为美国农业中的重要支柱产业,为发展健康农业、有机农业、循环农业、改良中低产田和发展节粮型畜牧业方面做出了巨大贡献。 当前,中国牧草产业还非常落后,生产规模小,市场机制还不健全,所生产的大部分豆科牧草产品质量较低,缺乏在国际市场上的竞争能力。当前中国年产牧草6000万吨,但商品草仅280万吨,且80%为3级以下。 中国的草产品品种主要是紫花苜蓿和羊草,其中紫花苜蓿占90%以上。产品结构中,77%为草捆,2%为草块,8%为草颗粒,7%为草粉,6%为其它草产品,80%以上的苜蓿草产品粗蛋白含量14-16%。在国际草产品市场上,美国是最大的草产品出口国,日本是最大的草产品进口国。中国草产品出口18.05万吨,只占世界贸易量的2.9%;进口量1.98万吨,占世界贸易量的0.37%。 第一章、牧草概述 第一节牧草基础简述 一、定义 二、牧草特点 第二节牧草的分类 一、豆科与非豆科牧草
二、一年生与多年生牧草 三、夏季与冬季牧草 四、临时性与永久性牧草 五、混播与单播牧草 第三节牧草的经济价值 第四节牧草的相关标准 第五节牧草在世界范围的推广 第二章、 - 全球牧草业发展分析 第一节全球总体情况 一、全球家畜存栏 二、全球牧草种植面积 三、全球牧草产量 四、全球牧草主要应用产业 第二节 - 全球牧草部分国家及地区分析 一、北美 二、南美 三、欧盟 四、大洋洲 五、亚洲 第三章、中国食草类家畜养殖业相关政策分析第一节中央相关政策 第二节地方相关政策
多波束测深系统声速校正
多波束测深系统声速校正 3 何高文 (广州海洋地质调查局二海,510760) 摘要 海水声速是多波束测深系统进行水深测量的基本参数之一,声速剖面正确与否直接影响测量结果的精度和可靠性。本文阐述了声速对多波束水深测量的影响机理,并通过对南海SA 12试验区采集的声速资料的分析,以SeaBeam 2100多波束测深系统为例,对声速校正的技术方法进行了探讨。 关键词 海洋 声速校正 多波束测深 SeaBeam 2100测深系统中图分类号:P 73312 文献标识码:B 前言 自1994年原地矿部引进第一套多波束测深仪(SeaB eam 2100系统,安装于“海洋四号”船)以来,我国先后引进了多套深、浅水多波束测深系统,在大洋矿产资源调查和目前正在开展的近海大陆架及专属经济区的地形勘测中,发挥了巨大作用,引发了一场海底地形测量的革命,为有效地维护国家权益和即将开展的海域划界作出了很大贡献。 如何保证测量数据的精度及其可靠性,是任何测量仪器必须关注的问题,多波束测深仪也不例外。作为一种有别于传统单波束测深仪的水深测量仪器,影响多波束测深数据的因素 有很多,其中海水声速(简称“声速” )是重要的因素之一。下面以SeaB eam 2100系统为例,探讨声速对多波束测量数据的影响以及声速校正的技术方法。 由于SeaB eam 多波束测深系统的水深测量值是根据发射声波的往返时间与声波在海水中的传播速度来确定的,因此,及时为系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一;此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的数据取点,也将对测量结果产生影响。与传统的单波束测深仪相比,多波束测深仪对声速的要求更为严格(见后述)。所以,为了获得准确可靠的多波束测深数据,必须进行声速校正。通过对南海SA 12试验区海水声速系统测量结果的研究,获得了声速变化规律的认识,从而为SeaB eam 系统的声速校正提供科学依据。 1 声速影响因素 海洋中的声速是一个比较活跃的海洋学变量,它取决于介质中的许多声传播特性,随季 收稿日期:2000204220第19卷 第4期2000年12月 海 洋 技 术O CEAN T ECHNOLO GY V o l 119,N o 14 D ec,2000
船舶防台、抗台应急处置措施
仅供参考[整理] 安全管理文书 船舶防台、抗台应急处置措施 日期:__________________ 单位:__________________ 第1 页共4 页
船舶防台、抗台应急处置措施 (1)制定防台方案,包括防台组织机构,防台组织岗位职责,防台工作程序,防台通讯网络,防台值班制度等。 (2)施工期间,挖泥船应做好防风安全工作,每天接收天气预报,掌握江上气象动态,警惕热带气旋预兆及热带低压的突然袭击,必要时应提前到港内或避风锚地避风。本工程的防台锚地就近码头选用。 (3)挖泥船应加强值班,收到热带气旋警报时,船长应组织全体船员全力以赴,按《船舶防台技术操作规则》的要求,在调度室的统一部署下做好防台工作。 (4)在需要使用锚地避风防台时,提前编制使用防台锚地计划,选定避风锚地。 (5)为确保船舶安全,台风季节前,应组织人员检查船机设备、航行设备、航行仪表、系泊设备、通讯、救生、防火、水密装置、堵漏应急和排水设备,确保设备处于良好状态。组织全体船员学习防台知识,在思想上、组织上认真做好防台准备。 (6)在台风来临之前将应急防风锚作试放试收试验,检验锚机,保证随时可用,并将艉缆准备好;检查逃生通道,保证畅通;关闭加班出人口和通行舱口,盖好舷窗和铁盖,检查消防、救生器材齐全有效;备妥抛绳器、撇缆;绑扎牢固甲板、机舱内的活动部件;备齐应急潜水泵及其他防风物资、气割设备、工具盒电焊设备及属具;甲板上往来行走出,装好扶手索。 (7)在台风受袭前8小时,开始进入防风执行阶段。在风力小于等于6至7级时利用钢桩抗风,当风浪较大时利用防风锚抗风。在台风严重威胁时,撤离到安全避风锚地抛锚。 第 2 页共 4 页