快速解耦法
第五节快速解耦法
电力系统规模的日益扩大
在线计算要求的提出
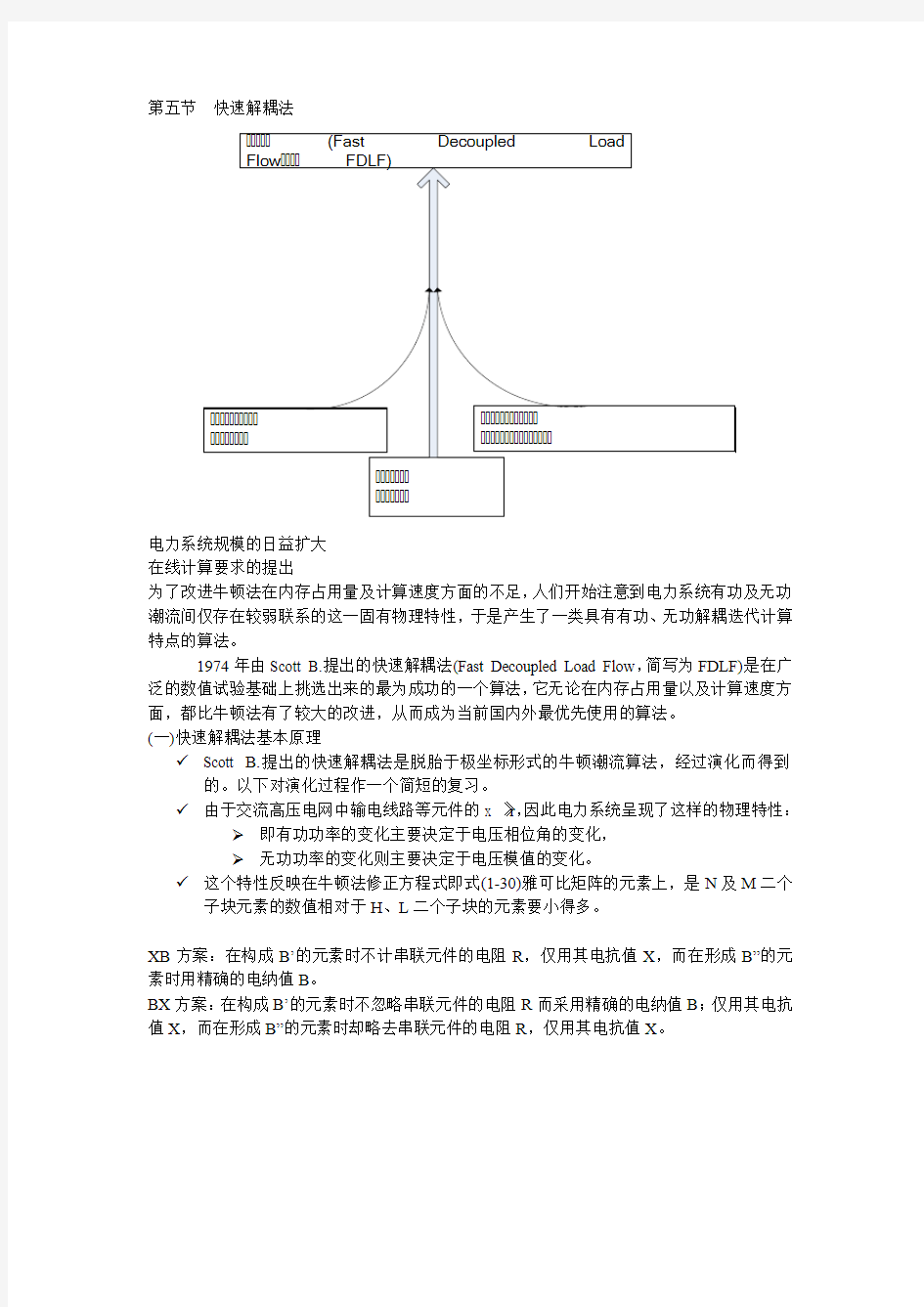
为了改进牛顿法在内存占用量及计算速度方面的不足,人们开始注意到电力系统有功及无功潮流间仅存在较弱联系的这一固有物理特性,于是产生了一类具有有功、无功解耦迭代计算特点的算法。
1974年由Scott B.提出的快速解耦法(Fast Decoupled Load Flow,简写为FDLF)是在广泛的数值试验基础上挑选出来的最为成功的一个算法,它无论在内存占用量以及计算速度方面,都比牛顿法有了较大的改进,从而成为当前国内外最优先使用的算法。
(一)快速解耦法基本原理
?Scott B.提出的快速解耦法是脱胎于极坐标形式的牛顿潮流算法,经过演化而得到的。以下对演化过程作一个简短的复习。
?由于交流高压电网中输电线路等元件的x 》r,因此电力系统呈现了这样的物理特性: 即有功功率的变化主要决定于电压相位角的变化,
无功功率的变化则主要决定于电压模值的变化。
?这个特性反映在牛顿法修正方程式即式(1-30)雅可比矩阵的元素上,是N及M二个子块元素的数值相对于H、L二个子块的元素要小得多。
XB方案:在构成B’的元素时不计串联元件的电阻R,仅用其电抗值X,而在形成B”的元素时用精确的电纳值B。
BX方案:在构成B’的元素时不忽略串联元件的电阻R而采用精确的电纳值B;仅用其电抗值X,而在形成B”的元素时却略去串联元件的电阻R,仅用其电抗值X。
系系系系系系系n-m-1系系系系系.
系M 系系系系系H 系系系系系系系系系系系系系系系系系系系(系系10o--20o系系系系系系系系系系系系系系系 B ii 系系系
ij
B 2i ii
U B ”系系系
交流高压电网中输电线路等元件的x>>r
电力系统呈现物理特性:
有功功率的变化主要决定于电压相位角的变化 无功功率的变化则主要决定于电压模值的变化
反映在牛顿法修正方程式雅可比矩阵的元素上,是N 及M 二个子块元素的数值相对于H 、L 二个子块的元素要小得多。
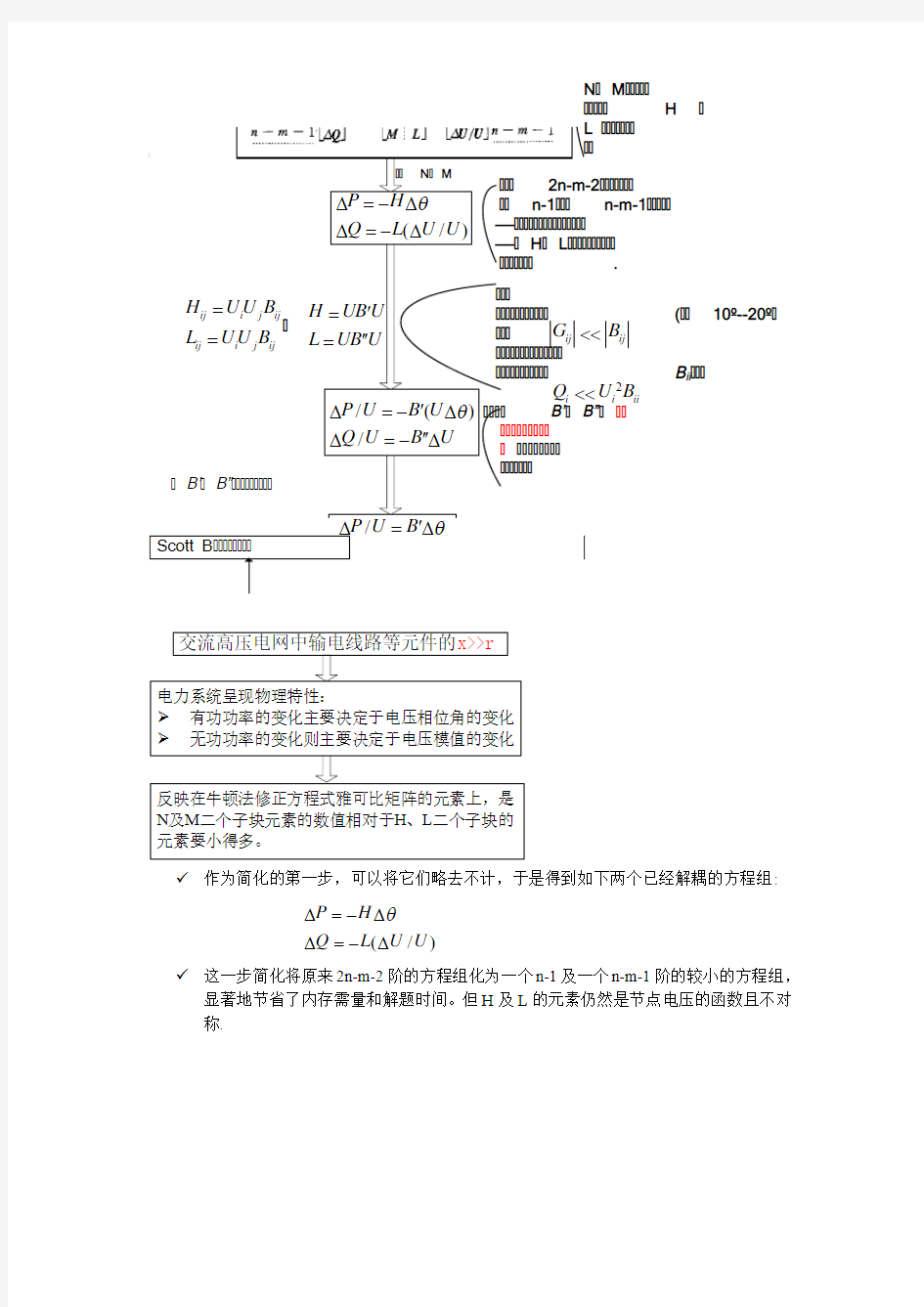
? 作为简化的第一步,可以将它们略去不计,于是得到如下两个已经解耦的方程组:
? 这一步简化将原来2n-m-2阶的方程组化为一个n-1及一个n-m-1阶的较小的方程组,
显著地节省了内存需量和解题时间。但H 及L 的元素仍然是节点电压的函数且不对称.
(/)
P H Q L U U θ?=-??=-?
(/)
P H Q L U U θ?=-??=-? 系系系2n-m-2系系系系系系系 系系n-1系系系n-m-1系系系系系. 系系系系系系系系系系系系系系系, 系H 系L 系系系系系系系系系系
系系系系系系系.N 系M 系系系系系系系系系系H 系L 系系系系系系系系系
ij i j ij ij i j ij
H UU B L UU B ==U
B U L U
B U H ''='=系
/()/P U B U Q U B U θ'?=-?''?=-?//P U B Q U B U
θ'?=?''?=?系系N 系M
系系系
系系系系系系系系系系系(系系10o--20o系系系系系系系系系系系系系系系系系系 系系系系系系系系系系系B ii 系系系
ij ij
G B <<2i i ii
Q U B <<2
/i i Q U 系系系系B ’系B ”系系系
系系系系系系系系系
系系系系系系系系系
系系系系系系系
系B ’系B ”系系系系系系系系系(1)
(2)
(3)
(4)
? 假设:
线路两端的相角差不大(小于10o--20o,而且ij ij G B <<,于是可以认为:
cos 1;ij ij ij ij G B θθ≈<<
与节点无功功率相对应的导纳2
/i i Q U 通常远小于节点的自导纳B ii ,也即
2i i ii Q U B <<
多变量解耦控制方法
多变量解耦控制方法 多变量解耦控制方法 随着被控系统越来越复杂,如不确定性、多干扰、非线性、滞后、非最小相位等,需要控制的变量往往不只一个,且多个变量之间相互关联,即耦合,传统的单变量控制系统设计方法显然无法满足要求,工程中常常引入多女量矗解WSi+o其思想早在控制科学发展初期就已形成,其实质是通过对一个具有耦合的多输入多输出控制系统,配以适当的补偿器,将耦合程度限制在一定程度或解耦为多个独立的单输入单输出系统。其发展主要以.血豹疔1964年提出的基于精确对消的全解竊映右全向癌及 Rosenbroc好20世纪60年代提出的基于对角优势化的现代频率法为代表,但这两种方 *法都要求被控对象精确建模,在应用上受到一定的限制。 近年来,随着控制理论的发展’多种解耦控制方渕应运而生,如特征结构配置解須、自校正解粮、拿性二次型解耦、奇异摄动解耦、自适应解耦、智能解耦、模糊解越等等护解耦控制丄直是一个充满活力、富有挑战性的问题。本文针对解耦方法进行了概述,并分析了其应用现状。-* 一、解耦控制的现状及问题 传统解耦控制 传统解耦方法包括前置补偿幺和现代频率法。前者包括矩阵求逆解耦、不变性解耦和逆向解耦G扁陶鮒滾漆nuM玆佼疇fW擄林遞跖网禅融8 据是其理论基础,比较适合 于线性金常竝力系统。主要尙括:七?? 1)逆奈氏阵列法
逆奈氏阵列法是对控制对象进行预先补偿,使传统函数的逆成为具有对角优势和正规性的矩阵。由于正规阵特征值对摄动不敏感,因而有较强的鲁棒性,其应用广泛。当然,当正规阵的上(下)三角元素明显大于下(上)三角元素时,可采用非平衡补偿法进行修正来提高鲁棒性,同时由于利用逆奈氏判据选择反馈增益时并不能保证闭环传递函数本身的对角优势,因此需反复调整补偿器的参数,使设计结果真正符合对角优势。 2)特征轨迹法 特征轨迹法是一种分析.必滋系统性态的精确方法。当采用其中的増益平衡法和特征向量配正法对补偿器进行近似处理时,其精确性难以得到保证,因而工程应用有限。倘若采用并矢展开法,则可利用其对角分解中变换矩阵与频率无关的特性解决补偿器工程难以实现的问题,但要求被控对象能够并矢分解,往往此条件难以满足’因而工程中应用不多见。 3)序列回差法 该方法是将补偿器逐个串入回路构成反馈,易于编程实现。从解耦的角度看’类似三角解耦,但其补偿器的确定方法并不明确,不能实现完全解耦。 4)奇异值分解法 包括奇异值带域法和逆结构正则化法。主要是先绘制开环传递函数的奇异值图,采用主増益、主相位分析法,或者广义奈氏定理来确定主带域与临界点的关系,从而判别系统的鲁棒稳定性,特别适于无法特征分解或并矢分解的系统。它是近年来普遍使用的方法之一。 此外,还有一些比较成功的频率方法,包括相对増益法、逆曲线法、特征曲线分析法。以上解耦方法中,补偿器严重依赖被控对象的精确建模,在现代的工业生产中不具有适应性,难以保证控制过程品质,甚至导致系统不稳定。即使采用这些方法进行部分解耦或者单向解耦,也不能实现完全解耦,而且辅助设计的工作量很大,不易实现动态解耦。 自适应解耦控制 自适应解耦岡是将自适应控制技术与解耦控制技术相结合并用于多变量系统,也即将被控对象的解耦、控制和辨识结合起来,以此实现参数未知或时变系统的在线精确解耦控制。吉禹萸底宴将耦合项视为可测干扰,采用自校正前馈控制的方法,对耦合进行动、静态补偿,对补偿器的参数进行寻优。它是智能解耦理论的基础,适于时变对象。对于最小相位系统,自适应解耦控制采用最爪分臺佥前俺可以抑制交联,对于非最小相位系统,它可采用广义最小方差控制律,只要性能指标函数中含有耦合项,就可达到消
多变量系统解耦现状的分析
万方数据
万方数据
万方数据
多变量系统解耦现状的分析 作者:达成莉 作者单位:西安建筑科技大学控制理论与控制工程专业,陕西西安,710055 刊名: 工业控制计算机 英文刊名:Industrial Control Computer 年,卷(期):2011,24(12) 被引用次数:1次 参考文献(15条) 1.闵娟;黄之初多变量解耦控制方法 2004(z2) 2.王启智工程解耦控制系统的研究 2002 3.史继森精馏塔的控制[期刊论文]-自动化博览 2008(08) 4.王诗宓多变量系统分析和设计 1992 5.李旭;张殿华;何立平特征轨迹法解耦活套高度和张力控制系统 2006(01) 6.古孝鸿;周立峰线性多变量系统频域法 1990 7.蒋慰孙;叶银忠多变量控制系统分析与设计 2001 8.Kouvaritaskis B;Rossiter J A Multivariable Nyquist self-tuning:a general approach 1989(05) 9.Wittenmark B;Middleton R;Goodwin G C Adaptive decoupling of multivariable systems 1987(06) 10.舒迪前;奉川东;尹怡欣多变量系统神经网络解耦广义预测控制及应用 2006(04) 11.平玉环;于希宇;孙剑多变量系统模糊解耦方法综述[期刊论文]-仪器仪表用户 2010(01) 12.曾静;薛定宇;袁德成非线件系统的多模型预测控制方法[期刊论文]-东北大学学报(自然科学版) 2009(01) 13.尹成强;岳继光多变量时滞过程的鲁棒解耦控制 2009 14.王晓燕多变量解耦内模控制在锅炉燃烧系统中的应用研究[学位论文] 2008 15.戴文战;丁良;杨爱萍内模控制研究进展[期刊论文]-控制工程 2011(04) 引证文献(1条) 1.张建华.鞠晓峰基于LMDI的中国石化产业CO2排放的解耦分析[期刊论文]-湖南大学学报(自然科学版) 2012(10)本文链接:https://www.360docs.net/doc/6c7260746.html,/Periodical_gykzjsj201112033.aspx
快速解耦法
第五节快速解耦法 电力系统规模的日益扩大 在线计算要求的提出 为了改进牛顿法在内存占用量及计算速度方面的不足,人们开始注意到电力系统有功及无功潮流间仅存在较弱联系的这一固有物理特性,于是产生了一类具有有功、无功解耦迭代计算特点的算法。 1974年由Scott B.提出的快速解耦法(Fast Decoupled Load Flow,简写为FDLF)是在广泛的数值试验基础上挑选出来的最为成功的一个算法,它无论在内存占用量以及计算速度方面,都比牛顿法有了较大的改进,从而成为当前国内外最优先使用的算法。 (一)快速解耦法基本原理 ?Scott B.提出的快速解耦法是脱胎于极坐标形式的牛顿潮流算法,经过演化而得到的。以下对演化过程作一个简短的复习。 ?由于交流高压电网中输电线路等元件的x 》r,因此电力系统呈现了这样的物理特性: 即有功功率的变化主要决定于电压相位角的变化, 无功功率的变化则主要决定于电压模值的变化。 ?这个特性反映在牛顿法修正方程式即式(1-30)雅可比矩阵的元素上,是N及M二个子块元素的数值相对于H、L二个子块的元素要小得多。 XB方案:在构成B’的元素时不计串联元件的电阻R,仅用其电抗值X,而在形成B”的元素时用精确的电纳值B。 BX方案:在构成B’的元素时不忽略串联元件的电阻R而采用精确的电纳值B;仅用其电抗值X,而在形成B”的元素时却略去串联元件的电阻R,仅用其电抗值X。
系系系系系系系n-m-1系系系系系. 系M 系系系系系H 系系系系系系系系系系系系系系系系系系系(系系10o--20o系系系系系系系系系系系系系系系 B ii 系系系 ij B 2i ii U B ”系系系 交流高压电网中输电线路等元件的x>>r 电力系统呈现物理特性: 有功功率的变化主要决定于电压相位角的变化 无功功率的变化则主要决定于电压模值的变化 反映在牛顿法修正方程式雅可比矩阵的元素上,是N 及M 二个子块元素的数值相对于H 、L 二个子块的元素要小得多。 ? 作为简化的第一步,可以将它们略去不计,于是得到如下两个已经解耦的方程组: ? 这一步简化将原来2n-m-2阶的方程组化为一个n-1及一个n-m-1阶的较小的方程组,显著地节省 了内存需量和解题时间。但H 及L 的元素仍然是节点电压的函数且不对称. (/) P H Q L U U θ?=-??=-?
第十章_解耦
第10章 解耦控制系统 当再同一设备或装置上设置两套以上控制系统时,就要考虑系统间关联的问题。其关联程度可通过计算各通道相对增益大小来判断。如各通道相对增益都接近于1,则说明系统间关联较小;如相对增益于1差距较大,则说明系统间关联较为严重。对于系统间关联比较小的情况,可以采用控制器参数整定,将各系统工作频率拉开的办法,以削弱系统间的关联的影响。如果系统间关联非常严重,就需要考虑解耦的办法来加以解决。解耦的本质是设置一个计算装置,去抵消过程中的关联,以保证各个单回路控制系统能独立地工作。 为了便于分析,下面对2×2系统的关联及其解耦方法进行研究。具有关联影响的2×2系统的方块图如图10—1所示。 从图10—1可看出,控制器c 1的输出p 1(s )不仅通过传递函数G 11(s )影响Y 1,而且通过交叉通道传递函数G 21(s )影响Y 2。同样控制器c 2的输出p 2(s )不仅通过传递函数G 22(s )影响Y 2,而且通过交叉通道传递函数G 12(s )影响Y 1。 上述关系可用下述数学关系式进行表达: Y 1(s )=G 11(s )P 1(s )+G 12(s )P 2(s ) (10—1) Y 2(s )=G 21(s )P 1(s )+G 22(s )P 2(s ) (10—2) 将上述关系式以矩阵形式表达则成: ?? ? ?????????=??????)()()() ()()()()(212221121121s P s P s G s G s G s G s Y s Y (10—3) 或者表示成: Y (s )=G (s )P (s ) (10—4) 式中 Y (s )——输出向量; P (s )——控制向量; G (s )——对象传递矩阵: ?? ? ? ??=)() ()() ()(22211211s G s G s G s G s G (10—5) 所谓解耦控制,就是设计一个控制系统,使之能够消除系统之间的耦合关系, R 1 ) R 2 图10—1 2×2关联系统方块图
P-Q分解法潮流计算方法改进综述
P-Q分解法潮流计算方法改进综述 摘要:本文介绍了P-Q分解法潮流计算方法的数学模型,简化假设及特点,总 结了P-Q分解法在低压配电网络中,随着支路R/X比值的增大所带来的迭代次数 增大和不收敛性的解决方法,及该方法在不同假设条件下收敛性,并提出了自己 的见解。 关键词: P-Q分解法;收敛性;大R/X比支路 1 潮流计算的数学模型 P-Q分解法又称为快速解耦法,是基于牛顿-拉夫逊法的改进,其基本思想是:把节点功率表示为电压向量的极坐标方程式,抓住主要矛盾,把有功功率误差作 为修正电压向量角度的依据,把无功功率误差作为修正电压幅值的依据,把有功 功率和无功功率迭代分开进行【1】。 对一个有 n 个节点的系统,假定第1个为平衡节点,第 2~m+1号节点为PQ 节点,第m+2~n号节点为PV节点,则对于每一个PQ或PV节点,都可以在极坐 标形式下写出一个有功功率的不平衡方程式: 这些假设密切地结合了电力系统的某些固有特点,作为电力系统潮流计算广泛使用的一 种算法,P-Q分解法无论是内存占用量还是计算速度方面都比牛顿-拉夫逊法有了较大的改进,主要反映在以下三点: ① 在修正方程式中,B’和B’’二者的阶数不同。B’为n-1 阶,B ‘’为m阶方阵,简化了牛 顿法的一个n+m-1的方程组,显著减少了方程组的求解难度,相应地也提高了计算速度。 ②用常系数矩阵B’和B’’代替了变系数雅可比矩阵,而且系数矩阵的元素在迭代过程中 保持不变。系数矩阵的元素是由导纳矩阵元素的虚部构成的,可以在进行迭代过程以前,对 系数矩阵形成因子表,然后反复利用因子表对不同的常数项△P/V 或△Q/V进行前代和回代 运算,就可以迅速求得电压修正量,从而提高了迭代速度,大大地缩短了每次迭代所需的时 间【2】。 ③用对称的B’和B’’代替了不对称的雅可比矩阵,因此只需要存储因子表的上三角部分,这样减少了三角分解的计算量和内存【2】。 3 P-Q分解法的收敛性改进 在各种文献中,都有对P-Q分解法从不同方面提出了讨论和改进,有些是对硬件的改进,如使用并行算法和相应的并行软件来替代原来的串行处理,有些是对算法程序做出了改进, 方法众多,不在此累述。但是我注意到,在实际应用中,由于理论与实际复杂多变的差别, 一些网络如果不满足P-Q分解法的前提假设,可能会出现迭代次数增加或不收敛的情况,而 一些病态系统或重负荷系统,特别是放射状电力网络的系统,也会出现计算过程的振荡或不 收敛的情况。针对此类异常网络,从网络参数改进的角度出发,对此做出了总结。 3.1 大R/X比支路的处理 一般来说,110KV以上的高压电力网中,输电线支路易满足R< 学科分类号110.3420 州 GUIZHOU NORMAL COLLEGE 本科毕业论文 题目—几种常用数值积分方法的比较_____________ 姓名潘晓祥学号1006020540200 院(系)数学与计算机科学学院 __________________ 专业数学与应用数学年级_____________2010级 指导教师雍进军职称______________________讲师 二O—四年五月 贵州师范学院本科毕业论文(设计)诚信声明本人郑重声明:所呈交的本科毕业论文(设计),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议,除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。 本科毕业论文作者签名: 年月曰 贵州师范学院本科毕业论文(设计)任务书 研究方法: 本论文主要通过对相关文献和书籍的参考,合自己的见解,复化求积公式,Newton —Cotes求积公式,Romberg求积公式,高斯型求积公式进行讨论并进行上机实验,从代数精度,求积公式误差等角度对这些方法进行分析比较完成期限和采取的主要措施: 本论文计划用6个月的时间完成,阶段的任务如下: (1) 7月份查阅相关书籍和文献; (2) 8月份完成开题报告并交老师批阅; (3) 9月份完成论文初稿并交老师批阅; (4) 10月份完成论文二搞并交老师批阅; (5) 11月份完成论文三搞; (6) 12月份定稿. 主要措施:考相关书籍和文献,合自己的见解,老师的指导下和同学的帮助下完成 主要参考文献及资料名称: [1] 关治?陆金甫?数学分析基础(第二版) [M].北京:等教育出版社.2010.7 [2] 胡祖炽.林源渠.数值分析[M]北京:等教育出版社.1986.3 [3] 薛毅.数学分析与实验[M] 北京:业大学出版社2005.3 [4] 徐士良.数值分析与算法[M].北京:械工业出版社2007.1 [5] 王开荣.杨大地.应用数值分析[M]北京:等教育出版社2010.7 [6] 杨一都.数值计算方法[M].北京:等教育出版社.2008.4 [7] 韩明.王家宝.李林.数学实验(MATLAB版[M].上海:济大学出版社2012.1 [8] 圣宝建.关于数值积分若干问题的研究[J].南京信息工程大学.2009.05.01. : 42 [9] 刘绪军.几种求积公式计算精确度的比较[J].南京职业技术学院.2009. [10] 史万明.吴裕树.孙新.数值分析[M].北京理工大学出版社.2010.4. 指导教师意见: 签名: 年月日 第7章 数值积分法 7.1 实验目的 了解求积公式及代数精度概念,理解并掌握求定积分的求积公式的算法构造和计算,学习用计算机求定积分的一些科学计算方法和简单的编程技术和能用程序实现这些算法。 7.2 概念与结论 1. 求积公式 计算定积分的如下形式的近似公式: 称为求积公式。 2.代数精度 若求积公式 对一切不高于m 次的 多项都准确成立,而对于m+1次多项式等号不成立,则称此求积公式 的代数精度为m 。 代数精度越高,求积公式越好。 3.求积余项 4.Newton-Cotes 求积公式的代数精度 n 点Newton-Cotes 求积公式的代数精度至少可以达到n-1,且当n 为奇数时,可以达到n 。 ?∑=≈b a n k k k x f A dx x f 1 ) ()(?∑=≈b a n k k k x f A dx x f 1 ) ()(?∑=-=b a n k k k x f A dx x f f R 1 ) ()()( ? =b a dx x f I )(5.Richardson 外推定理 设函数F 1(h)逼近量F*的余项为: F*-F 1(h)=a 1h p1 +a 2h p2 +····+a k p k +··· 式中p k >p k-1>···>p 2>p 1>0, F*和a i (i=1,2, ···)都是与h 无关的常数,且k ≥1时,a k ≠0,则由: 定义的函数F 2(h)也逼近F*,且有 F*-F 2(h)= b 2h p2 +····+b k p k +··· 6. 关于复合梯形公式的展开定理 设f(x)在[a,b]区间上无穷次可微,则有如下展开式: T(h)=I+a 1h 2 +a 2h 4 +a 3h 6 +…+a m h 2m +… 式中T(h)是函数f(x)在[a,b]区间上的复化梯形值Tn, 7.3 程序中Mathematica 语句解释 1. 随机函数 Random[] 随机给出闭区间[0,1]内的一个实数 Random[Real, xmax] 随机给出闭区间[0,xmax]内的一个实数 Random[Real, {xmin, xmax}] 随机给出闭区间[xmin,xmax]内的一个实数 Random[Integer] 随机给出整数0或1 Random[Integer, {xmin, xmax}] 随机给出xmin 到xmax 之间的一个整数 Random[Complex] 随机给出单位正方形内的一个复数 2.{a1,a2,…,an} 表示由元素a1,a2,…,an 组成的一个表,元素可以是任何内容。 ) 10(1) ()()(1 1112<<--= q q h F q qh F h F p p 实验10 数值积分 实验目的: 1.了解数值积分的基本原理; 2.熟练掌握数值积分的MATLAB 实现; 3.会用数值积分方法解决一些实际问题。 实验内容: 积分是数学中的一个基本概念,在实际问题中也有很广泛的应用。同微分一样,在《微积分》中,它也是通过极限定义的,由于实际问题中遇到的函数一般都以列表形式给出,所以常常不能用来直接进行积分。此外有些函数虽然有解析式,但其原函数不是初等函数,所以仍然得不到积分的精确值,如不定积分?1 0 d sin x x x 。这时我们一般考虑用数值方法计算其 近似值,称为数值积分。 10.1 数值微分简介 设函数()y f x =在* x 可导,则其导数为 h x f h x f x f h ) ()(lim )(**0* -+='→ (10.1) 如果函数()y f x =以列表形式给出(见表10-1),则其精确值无法求得,但可由下式求得其近似值 h x f h x f x f ) ()()(*** -+≈' (10.2) 一般的,步长h 越小,所得结果越精确。(10.2)式右端项的分子称为函数()y f x =在 *x 的差分,分母称为自变量在*x 的差分,所以右端项又称为差商。数值微分即用差商近似 代替微商。常用的差商公式为: 000()() ()2f x h f x h f x h +--'≈ (10.3) h y y y x f 243)(2 100-+-≈ ' (10.4) h y y y x f n n n n 234)(12+-≈ '-- (10.5) 其误差均为2 ()O h ,称为统称三点公式。 10.2 数值微分的MATLAB 实现 MATLAB 提供了一个指令求解一阶向前差分,其使用格式为: dx=diff(x) 其中x 是n 维数组,dx 为1n -维数组[]21321,, ,n x x x x x x ---,这样基于两点的数值导 数可通过指令diff(x)/h 实现。对于三点公式,读者可参考例1的M 函数文件diff3.m 。 例1 用三点公式计算()y f x =在=x 1.0,1.2,1.4处的导数值,()f x 的值由下表给出。 解:建立三点公式的M 函数文件diff3.m 如下: function f=diff3(x,y) n=length(x);h=x(2)-x(1); f(1)=(-3*y(1)+4*y(2)-y(3))/(2*h); for j=2:n-1 f(j)=(y(j+1)-y(j-1))/(2*h); end f(n)=(y(n-2)-4*y(n-1)+3*y(n))/(2*h); %% 清空环境变量 clc clear %% 网络结构初始化 rate1=0.006;rate2=0.001; %学习率 k=0.3;K=3; y_1=zeros(3,1);y_2=y_1;y_3=y_2; %输出值 u_1=zeros(3,1);u_2=u_1;u_3=u_2; %控制率 h1i=zeros(3,1);h1i_1=h1i; %第一个控制量 h2i=zeros(3,1);h2i_1=h2i; %第二控制量 h3i=zeros(3,1);h3i_1=h3i; %第三个空置量 x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输出 %权值初始化 k0=0.03; %第一层权值 w11=k0*rand(3,2); w12=k0*rand(3,2); w13=k0*rand(3,2); %第二层权值 w21=k0*rand(1,9); w22=k0*rand(1,9); w23=k0*rand(1,9); %值限定 ynmax=1;ynmin=-1; %系统输出值限定 xpmax=1;xpmin=-1; %P节点输出限定 qimax=1;qimin=-1; %I节点输出限定 qdmax=1;qdmin=-1; %D节点输出限定 uhmax=1;uhmin=-1; %输出结果限定 %% 网络迭代优化 for k=1:1:200 %% 控制量输出计算 %--------------------------------网络前向计算-------------------------- %系统输出 y1(k)=(0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2); y2(k)=(0.2*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.4*u_1(2)^3+0.2*u_1(1))+0.3*y_1(3); y3(k)=(0.3*y_1(3)+u_1(3)/(1+u_1(3)^2)+0.4*u_1(3)^3+0.4*u_1(2))+0.3*y_1(1); 多变量解耦控制 在现代化工业生产中,对过程控制的要求越来越高,因此,对一个生产装置中往往设置多个控制回路,稳定各个被控参数。此时,各个控制回路之间会发生相互耦合,相互影响,这种耦合构成了多输入-多输出耦合系统。由于这种耦合,使得系统的性能很差,过程长久不能平稳下来。例如发电厂的锅炉液位和蒸汽压力两个参数之间存在耦合关系。锅炉系统的示意图如图所示。 发电锅炉中,液位系统的液位是被控量,给水量是控制变量,蒸汽压力系统的蒸汽压力是被控量,燃料是控制变量。这两个系统之间存在着耦合关系。例如,蒸汽负荷加大,会使液位下降,给水量增加,而压力下降;又如压力上升时,燃料量减少,会使锅炉蒸汽蒸发量减少,液位升高,如此等等,各个参量之间存在着关联或耦合,相互影响。 实际装置中,系统之间的耦合,通常可以通过3条途径予以解决: (1) 在设计控制方案时,设法避免和减少系统之间有害的耦合; (2) 选择合适的调节器参数,使各个控制系统的频率拉开,以减少耦合; (3) 设计解耦控制系统,使各个控制系统相互独立(或称自治)。 8.4.1 解耦控制原理 工业生产中可以找出许多耦合系统。下面以精馏塔两端组分得到耦合,说明解耦控制原理。精馏塔组分控制如图8.65所示。 图中 q ),(t r q s (t)分别是塔顶回流量和塔底蒸汽流量; y 1(t),y 2(t)分别是塔顶组分和塔地组分。 显然,在精馏塔系统中,塔顶回流量q ),(t r 塔底蒸汽流量q s (t)对塔顶组分y 1(t)和塔底组分y 2(t)都有影响,因此,两个组分控制系统之间存在耦合,这种耦合关系,可表示成图 8.66所示。 图中R 1(s),R 2(s)分别为两个组分系统的给定值; Y 1(s) Y 2(s)分别为两个组分系统的被控量 D 1(s) D 2(s)分别为两个组分系统调节器的传递函数; g 2(s)是对象F(s)的传递矩阵,其中G 11(s)是调节器D 1(s)对Y 1(s)的作用通道。G 21(s)是调节器D 1(s)对Y 2(s)的作用通道。G 22(s)是调节器D 2(s)对Y 2(s)的作用通道。G 12(s)是调节器D 2(s)对的Y 1(s)作用通道。 由此可见,两个组分系统的耦合关系,实际上是通过对象特性G 21(s), G 12(s)相互影响的。为了解决两个组分之间的耦合,需要设计一个解耦装置F(s)。如图所示。F(s)实际上由F 11(s), F 12(s), F 21(s), F 22(s)构成。使得调节器D 1 (s)的输出U 1(s)除了主要影响Y 1(s)外, 目录 第一章数值积分计算的重述 (1) 1.1引言 (1) 1.2问题重述 (2) 第二章复化梯形公式 (3) 2.1 复化梯形公式的算法描述 (3) 2.2 复化梯形公式在C语言中的实现 (3) 2.3 测试结果 (4) 第三章复化simpson公式 (6) 3.1 复化simpson公式的算法描述 (6) 3.2 复化simpson公式在C语言中的实现 (6) 3.3 测试结果 (7) 第四章复化cotes公式 (8) 4.1 复化cotes公式的算法描述 (8) 4.2 复化cotes公式在C语言中的实现 (9) 4.3 测试结果 (10) 第五章Romberg积分法 (11) 5.1 Romberg积分法的算法描述 (11) 5.2 Romberg积分法在C中的实现 (12) 5.3 测试结果 (13) 第六章结果对比分析和体会 (144) 参考文献 (16) 附录 (16) 数值积分?-10 2 dx e x (一) 第一章 数值积分计算的重述 1.1引言 数值积分是积分计算的重要方法,是数值逼近的重要内容,是函数插值的最直接应用,也是工程技术计算中常常遇到的一个问题。在应用上,人们常要求算出具体数值,因此数值积分就成了数值分析的一个重要内容。在更为复杂的计算问题中,数值积分也常常是一个基本组成部分。 在微积分理论中,我们知道了牛顿-莱布尼茨(Newton-Leibniz)公式 ()() () b a f x d x F b F a =-? 其中()F x 是被积函数()f x 的某个原函数。但是随着学习的深入,我们发现一个问题: 对很多实际问题,上述公式却无能为力。这主要是因为:它们或是被积函数没有解析形式的原函数,或是只知道被积函数在一些点上的值,而不知道函数的形式,对此,牛顿—莱布尼茨(Newton-Leibniz)公式就无能为力了。此外,即使被积函数存在原函数,但因找原函数很复杂,人们也不愿花费太多的时间在求原函数上,这些都促使人们寻找定积分近似计算方法的研究,特别是有了计算机后,人们希望这种定积分近似计算方法能在计算机上实现,并保证计算结果的精度,具有这种特性的定积分近似计算方法称为数值积分。由定积分知识,定积分只与被积函数和积分区间有关,而在对被积函数做插值逼近时,多项式的次数越高,对被积函数的光滑程度要求也越高,且会出现Runge 现象。如7n >时,Newton-Cotes 公式就是不稳定的。因而,人们把目标转向积分区间,类似分段插值,把积分区间分割成若干小区间,在每个小区间上使用次数较低的Newton-Cotes 公式,然后把每个小区间上的结果加起来作为函数在整个区间上积分的近似,这就是复化的基本思想。本文主要 本科毕业设计论文 题目多变量解耦控制方法研究 专业名称 学生姓名 指导教师 毕业时间 毕业 一、题目 多变量解耦控制方法研究 二、指导思想和目的要求 通过毕业设计,使学生对所学自动控制原理、现代控制原理、控制系统仿真、电子技术等的基本理论和基本知识加深理解和应用;培养学生设计计算、数据处理、文件编辑、文字表达、文献查阅、计算机应用、工具书使用等基本事件能力以及外文资料的阅读和翻译技能;掌握常用的多变量解耦控制方法,培养创新意识,增强动手能力,为今后的工作打下一定的理论和实践基础。 要求认真复习有关基础理论和技术知识,认真对待每一个设计环节,全身心投入,认真查阅资料,仔细分析被控对象的工作原理、特性和控制要求,按计划完成毕业设计各阶段的任务,重视理论联系实际,写好毕业论文。 三、主要技术指标 设计系统满足以下要求: 每一个输出仅受相应的一个输入控制,每一个输入也仅能控制相应的一个输出。 四、进度和要求 1、搜集中、英文资料,完成相关英文文献的翻译工作,明确本课题的国内 外研究现状及研究意义;(第1、2周) 2、完成总体设计方案的论证并撰写开题报告;(第 3、4周) 3、分析控制系统解耦;(第5、6周) 4、应用前馈补偿法进行解耦;(第7、8周) 5、应用反馈补偿法进行解耦;(第9、10周) 6、利用MATLAB对控制系统进行仿真;(第11周) 7、整理资料撰写毕业论文; (1)初稿;(第12、13周) (2)二稿;(第14周) 8、准备答辩和答辩。(第15周) 五、主要参考书及参考资料 [1]卢京潮.《自动控制原理》,西北工业大学出版社,2010.6 [2]胡寿松.《自动控制原理》,科学2008,6出版社,2008.6 [3]薛定宇.陈阳泉,《系统仿真技术与应用》,清华大学出版社,2004.4 [4]王正林.《MATLAB/Simulink与控制系统仿真》,电子工业出版社,2009.7 [5]刘豹.《现代控制理论》,机械工业出版社,2004.9 [6]古孝鸿.周立群.线性多变量系统领域法[M].上海:上海交通大学出版社,1990. [7]李帆.不确定系统的解耦控制与稳定裕度分析[D].西安:西北工业大学,2001. [8]柴天佑.多变量自适应解耦控制及应用[M].北京:科学出版社,2001. [9]张晓婕.多变量时变系统CARMA模型近似解耦法[J].中国计量学院学报,2004,15(4):284-286. 学生指导教师系主任 1999年 6月第20卷第3期东北大学学报(自然科学版)Journal of Northeastern U niversity(Natural Science)Jun.1999Vol 120,No.3 多变量系统的神经网络解耦新方法 X 靳其兵1 曾东宁o 王云华1 顾树生1 (1东北大学信息科学与工程学院,沈阳 110006;o东北电业管理局,沈阳 110006) 摘 要 利用前馈补偿的原理,设计了两种多变量系统的神经网络解耦方法#一种利用神经网络实现前馈补偿,使补偿以后的系统实现解耦,且解耦单变量系统具有原对象主通道的特性#第二种方法将解耦和神经网络逆动态控制结合起来,使对象的输出跟随对应输入值的变化#两种方法均可适用于多变量非线性系统# 关键词 神经网络,前馈补偿,非线性系统,解耦,神经网络逆控制#分类号 TP 2731112 对多变量系统实现解耦控制是目前普遍采用的方法#在闭环自适应解耦控制中,实现解耦的基本思想可归结为[1,2]:对于某一通道,可以将其余通道对它的影响看成是干扰信号,用前馈补偿的方法进行消除#本文就借鉴这一思想,设计了两种多变量系统的神经网络解耦新方法,这两种方法均可适用于非线性系统# 1 方法1:基于神经网络的开环前馈 解耦 以一个二输入、二输出对象为例,神经网络开环前馈解耦示于图1,其中f 11,f 12,f 21,f 22为对 象特性,且y i (k +1)= 62 j=1f ij [y i (k),y i (k - 1),,, y i (k -n i j ),u j (k),,,u j (k -m ij )] (i =1,2) (1) N 12,N 21为神经网络解耦环节#对于第一个主通道f 11和输出y 1(k +1),可以将第二通道的输入u 2(k)看成一个可测干扰,通过引入前馈补偿环节N 12进行消除,根据前馈补偿的原理可知,当取 N 12=f 12#f -1 11时,就可以消除u 2(k)对y 1(k +1)的影响#同理,当取N 21=f 21#f -1 22时就可消除u 1 (k)对y 2(k +1)的影响#不难看出,引入N 12,N 21 以后,y 1(k +1)只受r 1(k)的控制,且两者之间的映射关系为f 11,y 2(k +1)只受r 2(k)的控制,两 者之间的映射关系为f 22,即解耦以后的单变量系统具有原对象主通道的特性# f 11和f 22通常是未知的,可预先建立它们的估计模型f ^11和f ^22,并且利用下列J 1和J 2分别作为对N 12,N 21进行训练的性能指标函数: J 1= 12 [y * 1(k +1)-y 1(k +1)]2J 2=12 [y *2(k +1 )-y 2(k +1)]2 (2) 其中,y *1(k +1),y *2(k +1)分别是r 1(k),r 2 (k)作用于f ^11和f ^22产生的输出(如图1所示)# 图1 神经网络开环前馈解耦 下面讨论N 12,N 21的神经网络实现#由于N 12=f 12#f -111, 所以N 12的功能可以看成由f 12和 f -111两部分串接而成(如图2)#由式(1)所确定的输入输出关系可知,将 u 2(k),u 2(k -1),,,u 2(k -m 12),w 1(k),w 1(k -1),,,w 1(k -n 12) (3) X 1998 09 04收到# 靳其兵,男,28,博士研究生;顾树生,男,59,教授,博士生导师# 辽宁省自然科学基金资助项目(编号:970514)# 多变量耦合系统在工业中的应用摘要:在机组功率调节、供热抽汽压力调节、工业抽汽压力调节时各受控对象相互影响,因此该系统为多变量耦合系统,一般的控制方法难以得到满意的控制效果;针对系统的上述特性,并根据实际情况,把它们看成一个统一的整体来考虑,并将多变量串级解耦技术应用到控制系统当中,使该系统的控制品质有了较大的提高;在自动投入后,电厂发电、热网供热、工业抽汽系统能够经济、稳定地运行,为电厂取得良好的社会效益和经济效益奠定了基础。 关键词:功率调节工业抽汽供热抽汽多变量解耦 引言 供热抽汽采用两机的低压缸前抽汽为汽源,由两个由油动机驱动的蝶阀控 制抽汽压力,供热抽汽的额定压力为0.196MPa;工业抽汽承担供气的重任,它 采用两机的一级调整抽汽为汽源、由四个油动机驱动的调节阀门(中调门)控制 工业抽汽压力,工业抽汽的额定压力为4.122Mpa,满负荷为160T/H。当机组 功率、供热抽汽压力、工业抽汽压力中任一变量发生扰动时,其它两个变量都会 受到影响,而它们的变化反过来又会影响这个变量,因此,在考虑控制策略时,不应把系统分开对待,应将各系统看作一个多变量整体。这种电、热、汽联调的 机组在内蒙尚属首次,这也增加了控制策略选取和自动投入的难度。 为保证系统的稳定性和经济性,调试时采用多变量解耦控制策略,尽可能减 少变量间的相互影响。考虑到实际应用时,控制策略受DCS系统运算速度和对 象数学模型不确定性等因素影响,我们将一些控制方法做了一定的简化,使其更适合实际运用。 1 理论依据 1.1控制对象介绍 系统在实际应用时,有以下三种情况 (1)工业抽汽压力自动投入,供热抽汽压力自动未投(电汽联调) (2)工业抽汽压力自动未投,供热抽汽压力自动投入(电热联调) (3)供热抽汽压力自动投入,工业抽汽压力自动投入(电热汽联调) 前两种方式为双输入、双输出的多变量控制系统;在第三种情况下,系统控制对象为三输入、三输出的多变量对象:三个输入调节量为高调门指令u1,中调门指令u2,低压缸出口碟阀指令u3;三个输出控制量为机组实发功率P,工业抽汽压力P1,供热抽汽压力P2。三种情况的传递函数分别如式(1)、式(2)、式(3) (1) (2) (3) 综合性设计型实验报告 系别:化工机械系班级:10级自动化(2)班2013—2014学年第一学期 系统的相对增益矩阵为: 0.570.43 0.430.57 ?? Λ=?? ?? 。 由相对增益矩阵可以得知,控制系统输入、输出的配对选择是正确的;通道间存在较强的相互耦合,应对系统进行解耦分析。 系统的输入、输出结构如下图所示 (2)确定解耦调节器 根据解耦数学公式求解对角矩阵,即 ()() ()()()()()() ()()()() ()()()()?? ? ? ? ? - - - = ? ? ? ? ? ? s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G P P P P P P P P P P P P P P P P 22 11 21 11 22 12 22 11 21 12 22 11 22 21 12 11 1 22 222 128.752.8 3.313.6530.15 1 216.282.8 5.882544055128.752.8 3.3 S S S S S S S S S S ?? ++--- =?? ++++++ ??采用对角矩阵解耦后,系统的结构如下图所示: 解耦前后对象的simulink阶跃仿真框图及结果如下: 1)不存在耦合时的仿真框图和结果 图a 不存在耦合时的仿真框图(上)和结果(下)2)对象耦合Simulink仿真框图和结果 图b 系统耦合Simulink仿真框图(上)和结果(下) 对比图a和图b可知,本系统的耦合影响主要体现在幅值变化和响应速度上,但影响不显著。其实不进行解耦通过闭环控制仍有可能获得要求品质。 3)对角矩阵解耦后的仿真框图和结果 多变量解耦控制方法 随着被控系统越来越复杂,如不确定性、多干扰、非线性、滞后、非最小相位等,需要控制的变量往往不只一个,且多个变量之间相互关联,即耦合,传统的单变量控制系统设计方法显然无法满足要求,工程中常常引入多变量的解耦设计。其思想早在控制科学发展初期就已形成,其实质是通过对一个具有耦合的多输入多输出控制系统,配以适当的补偿器,将耦合程度限制在一定程度或解耦为多个独立的单输入单输出系统。其发展主要以Morgar于1964年提出的基于精确对消的全解耦状态空间法及Rosenbrock ????????于20世纪60年代提出的基于对角优势化的现代频率法为代表,但这两种方法都要求被控对象精确建模,在应用上受到一定的限制。 近年来,随着控制理论的发 多种解耦控制方法应运而生, 如特征结构配置解耦、展,自校正解耦、线性二次型解 耦、奇异摄动解耦、自适应解耦、智能解耦、模糊解耦等等。解耦控制一直是一个充满活力、富有挑战性的问题。本文针对解耦方法进行了概述,并分析了其应用现状。 一、解耦控制的现状及问题 传统解耦控制 传统解耦方法包括前置补偿法和现代频率法。前者包括矩阵求逆解耦、不变性解耦和逆向解耦;后者包括时域方法,其核心和基础是对角优势,奈氏(Nyquist)稳定判据是其理论基础,比较适合于线性定常MIM系统。主要包括: 1)逆奈氏阵列法 逆奈氏阵列法是对控制对象进行预先补偿,使传统函数的逆成为具有对角优势和正规性的矩阵。由于正规阵特征值对摄动不敏感,因而有较强的鲁棒性,其应用广泛。当然,当正规阵的上(下)三角元素明显大于下(上)三角元素时,可采用非平衡补偿法进行修正来提高鲁棒性,同时由于利用逆奈氏判据选择反馈增益时并不能保证闭环传递函数本身的对角优势,因此需反复调整补偿器的参数,使设计结果真正符合对角优势。 2)特征轨迹法 特征轨迹法是一种分析MIM系统性态的精确方法。当采用其中的增益平衡法和特征向量配正法对补偿器进行近似处理时,其精确性难以得到保证,因而工程应用有限。倘若采用并矢展开法,则可利用其对角分解中变换矩阵与频率无关的特性解决补偿器工程难以实现的问题,但要求被控对象能够并矢分解,往往此条件难以满足,因而工程中应用不多见。 3)序列回差法 该方法是将补偿器逐个串入回路构成反馈,易于编程实现。从解耦的角度看,类似三角解耦,但其补偿器的确定方法并不明确,不能实现完全解耦。 4)奇异值分解法 包括奇异值带域法和逆结构正则化法。主要是先绘制开环传递函数的奇异值图,采用主 主动配电网分布式储能优化配置方法研究 发表时间:2019-05-23T09:18:35.307Z 来源:《防护工程》2019年第1期作者:李生根1 吴布托2 [导读] 能够更好地解决分布式风储、光储等发电单元的规划运行问题,具有更强的可行性和更长远的发展前景。 1.甘肃煤矿安全监察局甘肃 730030; 2.国网山东省电力公司检修公司山东青岛 266000 摘要:主动配电网中,能否解决分布式电源并网后的消纳问题及配电网络的优化管理,很大程度上取决于系统内储能的配置是否科学合理。本文主要研究了在分布式电源不同额定功率的情景下如何对并网储能接入及容量进行优化,以实现经济性与电网安全稳定运行的协调统一。对含多分布式电源的40节点配电网系统进行测试计算,验证了本文所设计方法的准确性,并分析了分布式电源额定功率变化及电 压等因素对储能配置的影响,为系统规划和建设提供了新的思路。关键词:主动配电网;分布式储能;遗传算法;容量优化 1风光储混合主动配电网分析及建模在含DG的主动配电网系统当中,储能装置一般有两种配置方式:集中式和分布式。集中式就是在系统特定位置集中安装储能装置,可用于平衡全网DG的不稳定出力;分布式则是为每个接入DG配置相应储能,储能只作用于其并联的DG,即分布式储能。本文选择分布式储能配置方法作为主要研究目标。分布式配置的优点是储能容量小于集中式,经济性高且可以灵活安装,随着主动配电网相关技术的发展在未来的可塑性更强;同时还可有效抑制对应DG的出力波动,改善DG性能,显著提高DG发电入网的比例,而高比例可再生能源并网是目前电网发展的趋势。储能采用分布式入网,能够更好地解决分布式风储、光储等发电单元的规划运行问题,具有更强的可行性和更长远的发展前景。 2分布式储能容量优化模型 2.1目标函数 目前安装储能系统带来的环境效益、电网可靠性收益等无法直接准确地量化为经济利益,因此本文站在配电网运营商投资储能角度,考虑储能并网带来的收益部分主要包括:通过分布式储能接入配电网后节约的电网扩容费用与网损费用,依靠储能增发的分布式电源上网电量带来的经济效益;成本部分主要顾及储能装置的站地址建设费用、电力转换设备费用、储能设备费用、年运行维护费用。 2.2储能系统 荷电状态(SOC)代表储能装置剩余容量与完全充电状态容量的比值。储能装置在t+1时刻的SOC由t时刻电量供求情况和储能装置充放电状态决定。为储能的充放电效率;EESS为储能系统的额定容量,Δt是储能充放电的时间间隔。 储能装置的充放电控制的一般策略为当DG出力大于负荷时,储能位于充电状态;当DG出力小于负荷时,储能位于放电状态。3模型求解 3.1算法 3.1.1潮流算法 本文主要研究低压主动配电网多DG接入情境下分布式储能容量的配置情况。配电系统有很多与输电系统不同的特征,如系统拓扑结构一般为辐射性树状、电压等级较输电网低、支路电阻不能忽略等,无法应用快速解耦法。同时在进行系统潮流计算时收敛性问题非常突出,使用牛拉法时初值问题可能会导致结果发散,综上考虑本文采用前推回代法进行潮流计算。 3.1.2遗传算法 遗传算法是一类借鉴生物界的进化规律(适者生存,优胜劣汰遗传机制)演化而来的随机化搜索方法。具有并行性、自适应寻优等特点,适合本文同时对多个储能功率计算的要求,所以这里采用遗传算法作为分布式储能容量优化模型的求解算法。本文将遗传算法生成的每一个个体用八位二进制数来进行编码,之后带入设定情景进行适应度函数(目标函数)计算,通过遗传操作提高适应度高的个体进入下一代的几率,通过交叉、变异等操作以模仿生物界产生新的个体防止整个种群陷入局部最优的早熟现象。将新一代种群按照上述方法重复实验,直到满足终止条件得出优解。 3.2求解流程 本文通过采用遗传算法生成储能容量的初始种群,得到对应目标函数值以寻求各分布式储能较优容量解,并保留到算法下一代。通过筛选优化,以寻求不同DG准入容量情景下储能容量的佳配置方案。在遗传算法内采用前推回代方法进行潮流计算,由潮流计算后所得各节点电压幅值等参数作为约束条件,若不满足约束条件,则降低该个体在种群当中的适应度直至淘汰。上述过程模拟为某时间段储能容量求解,若在储能规定的持续运行时间内储能容量约束指标SOC一直符合要求,则保留结果并进行分析,否则仍然需要剔除该组数据。将最后符合约束条件的各时间段所得数据统一整理,选取能够满足DG任何出力下的储能容量作为最优方案。4算例分析 4.1算例模型及参数设置 本文选取包含40节点的配电网作为测试系统,该网络共有32条支路,已知网络的15、38号节点接入DG为风力发电(WG),28、39号节点接入DG为光伏发电(PV)。电源网络首端基准额定电压23kV,三相功率基准值取15MVA。系统总用电负荷为13.599MW。根据某地区风速历史数据,得出Weibull分布模型的形状参数和尺度参数k=9.82、c=2.04;风力发电机的切入风速为3m/s,额定风速为15m/s,切出风速为20m/s。遗传算法中设置最大遗传代数为100代,每代的种群规模为100,算法的交叉概率为0.7,变异概率为0.05。前推回代潮流计算中设置最大迭代次数为100,防止程序在不收敛的时候陷入死循环。(1)装置的经济参数如表1所示。几种常用数值积分方法的比较汇总
数值积分法
数值积分的matlab实现
PID神经元网络解耦控制算法-多变量系统控制
多变量解耦控制
数值积分 (论文)
多变量解耦控制方法研究
多变量系统的神经网络解耦新方法
多变量耦合系统中文
解耦控制系统仿真
多变量解耦控制方法
主动配电网分布式储能优化配置方法研究