2016年-2017年东华大学824自动控制理论考研真题试题试卷汇编
目录
2016年东华大学824自动控制理论考研真题试题试卷 (2)
2017年东华大学824自动控制理论考研真题试题试卷 (5)
第 1 页,共 7 页
第 2 页,共 7 页
(定稿)天津大学2010年《自动控制理论》考研试题与答案(附录)
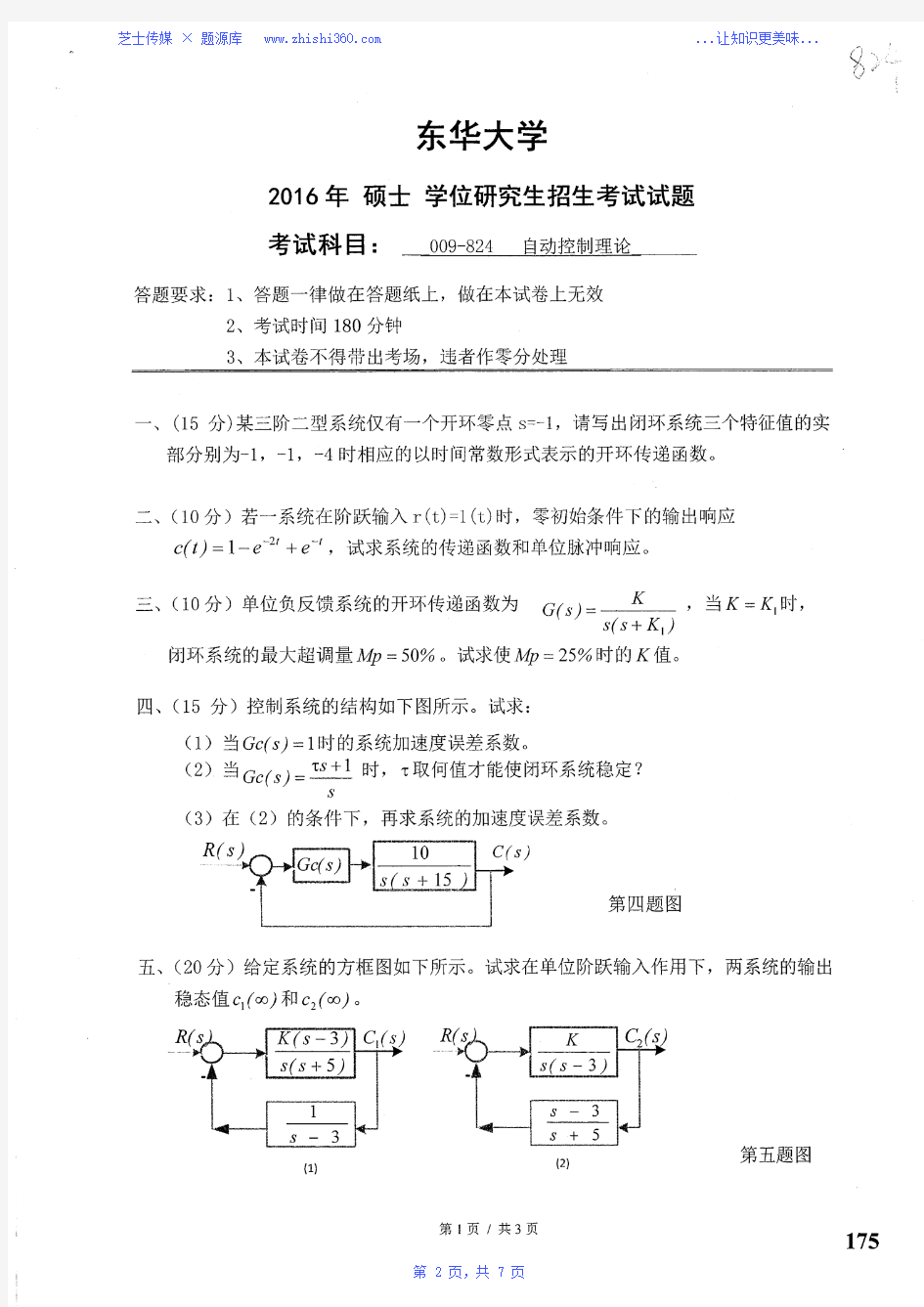
天津大学2010年《自动控制理论》考研试题与答案 一、选择题(每题6分,共30分) 1.应用输入函数和系统脉冲响应函数的卷积运算,可以用来()。 A.计算线性定常系统对输入的影响 B.计算定常系统对输入的相应,无论系统是线性的还是非线性的 C.计算线性系统对输入的相应,无论系统是定常的还是时变的 D.计算任意系统对任意输入的相应 答案:A 2.控制系统是稳定的,则()。 A.系统的控制误差渐近地趋于零 B.系统去除扰动后控制误差会渐近地趋于零 C.对给定的输入,系统不同初始条件下的响应渐近地趋于一致 D.系统参数出现漂移时可以维持系统的控制性能 答案:C 3.在闭环系统的调试过程中,逐渐增大系统的开环增益,结果发现当快速性和稳定性达到设计要求时系统的控制精度欠佳,问应该采取下述那种措施?()A.采用滞后校正B.采用超前校正 C.继续增加开环增益D.采用滞后-超前校正 答案:A 4.系统校正中控制器和被控对象间不稳定的零、极点间不能对消,是因为()。 A.零、极点对消会破坏系统的可控性和客观性 B.参数变化可避免,严格对消没有实际意义 C.零、极点对消往往导致复杂的控制器设计 D.这样做会导致系统的不稳定 答案:D 5.被控对象是可控可观的,则()。 A.总能设计出控制器,使得闭环系统是稳定的 B.可以构造状态观测器,使状态观测误差始终为零 C.可以任意决定状态变量的收敛速度和观测误差的收敛速度 D.应用状态反馈,可以任意配置系统的极点和零点 答案:B 二、(20分)质量弹簧系统如图所示,图中k为弹簧的弹力系数,f为阻尼器的摩擦系数,m为质量块的质量,F(t)为外力,以F(t)=0时重力作用下质量块的平衡位置为位移y的原点。(1)试列写外力F(t)作为输入,位移y作为输出时系统的输入输出微分方程描述,给出系统的传递函数;(2)设系统在单位阶跃外力作用下,质量块的稳态位移为0.1,系统的 无阻尼自然振荡频率 n 10 ω=,阻尼比0.5 ζ=,求系统参数m、k、f;(3)求阶跃输入下系统的动态响应指标t r、t p、t s(按5%误差计算)和σ%。
大连理工自动控制原理考研试卷99-05
大连理工大学一九九九年硕士生入学考试 《自动控制原理(含20%现代)》试题 一、(10分)试建立图一所示校正环节的动态结构图,并指出这是一个什么样的校正环节。 二、(10分)给定系统的动态结构图如图二所示。试求传递函数 )()(s R s C , ) () (s R s E 。 三、(10分)请解释对于图三所示的两个系统,是否可以通过改变K 值(K>0)使系统稳定。 四、(10分)已知单位反馈系统的开环传递函数为
试绘制K<<0 →∞的根轨迹图。 五、(15分)已知系统的开环传递函数为 G(s)H(s)= ) 110)(1() 11.0(+-+s s s s K 1. 试绘制K=1时的对数幅频、相频特性的渐近线; 2. 应用Nyguist 判据分析系统的稳定性,并说明改变K 值是否可以改变系统的稳定性。 六、(6分)简单说明PID 调节器各部分的作用。 答: P 作用: I 作用: D 作用: 七、(9分)设有两个非线性系统,它们的非线性部分一样,线性部分分别如下: 1. G(s)= ) 11.0(2 +s s 2. G(s)= ) 1(2 +s s 试问:当用描述函数法分析时,哪个系统分析的准确度高?为什么? 八、(10分)给定系统如图四所示。试求在单位阶跃输入时,系统输出的Z 变换Y(z). 九、(20分)设系统的状态空间表达式为 1.试求状态转移矩阵; 2.为保证系统状态的能观性,a 应取何值? 3.试求状态空间表达式的能观规范形; 4.用李亚普诺夫第二方法判断系统的稳定性。
大连理工大学二OOO 年硕士生入学考试 《自动控制原理(含20%现代)》试题 一、(20分)(本题仅限于单考生完成,单考生还需在以下各题中选做80分的考题,统考生 不做此题) 1.给定系统的开环传递函数为 试判别K 取值时系统稳定。 2.已知某一闭环系统有一对主导极点,由于这对主导极点距离S 平面的虚轴太近,使得系统的阶跃响应较差。试问系统响应较差表现在哪方面?欲改善系统性能应采取什么措施? 二、(10分)试求图一所示系统的微分方程。其中处作用力u(t)为输入,小车位移x(t)为输出。 三、(10分)给定系统的方框图如图二所示,试求闭环传递函数 ) () (s R s C 。 四、(10分)设单位反馈系统的开环传递函数为 G(s)= K
2017考研政治毛中特分析题
2017考研政治毛中特分析题
2017考研政治毛中特分析题 作者:@钟方源 万能模版 毛中特无论答什么,都要写: 我们要以全面建成小康社会、全面深化改革、全面依法治国、全面从严治党四个全面战略布局思想为指导, 协调推进经济建设、政治建设、文化建设、社会建设、生态文明建设五位一体, 落实创新、协调、绿色、开放、共享的发展理念。 实在写不出,再加上: 有利于增进人民福祉、促进人的全面发展 有利于树立道路自信、理论自信、制度自信、文化自信四个自信 能够符合中国的国情, 能够保障人民的根本利益,体现了社会主义的本质要求, 能够有效促进共同富裕, 能够提高综合国力,
实现中华民族伟大复兴的中国梦。 促进新型工业化、信息化、城镇化、农业现代化同步发展 有利于推进供给侧结构性改革,有利于三去一降一补(去产能、去库存、去杠杆、降成本、补短板) 有利于建设以富强民主文明和谐自由平等公正法治爱国敬业诚信友善为内容的社会主义核心价值观 一、全面建成小康 (一)、如何理解2020年全面建成小康社会“是实现中华民族伟大复兴中国梦的关键一步”?{重要性} ①第一,2020年全面建成小康社会就实现了党制定的两个百年目标的第一个目标;
②第二,到2020年实现这个目标,我们国家的发展水平就会迈上一个大台阶,这为实现第二个目标打下坚实基础。 ③全面小康、民族复兴,是两个紧密联系、相互交融的目标任务。没有全面小康的实现,民族复兴就无从谈起。{谈二者关系} 所以,2020年实现全面建成小康社会的目标是实现中华民族伟大复兴中国梦的重要里程碑和“关键一步”。{总结归纳} (二)、如何理解“小康不小康,关键看老乡”? ①之所以说“小康不小康,关键看老乡”,是因为2020年我们要建成的全面小康社会,{全面指的是什么} 1)覆盖的领域要全面,是五位一体全面进步的小康,{一项不能少} 2)覆盖的人口要全面,是惠及全体人民的小康,{一个不能少} 3)覆盖的区域要全面,是城乡共同发展的小康。{一处不能少} 而目前我国农村还有五千多万贫困人口没有解决,几百个贫困县没有摘帽,这是全面建成小康社会的重点和难点。
北京理工大学810自动控制理论考研真题及解析
北京理工大学考研历年真题解析 ——810自动控制理论 主编:弘毅考研 编者:yuyacheng 弘毅教育出品 https://www.360docs.net/doc/6c8180411.html,
【资料说明】 《自动控制理论历年真题解析》系北京理工大学考研辅导团队集体编撰的“历年考研真题解析系列资料”之一。 历年真题是除了参考教材之外的最重要的一份资料,其实,这也是我们聚团队之力,编撰此资料的原因所在。历年真题除了能直接告诉我们历年考研试题中考了哪些内容、哪一年考试难、哪一年考试容易之外,还能让我们有更多的意外收获。 1.命题风格与试题难易 有的同学第一次接触北理工自动控制理论历年试题,感觉有些偏有些怪,实际上北理工的考题不偏、不怪,80%的题目都是完全可以拿到分的,只不过北理工考题的特点是内容多、范围广,要求涉猎的知识点范围很全面,那么就要求我们按照北理工的考试大纲去把书本上的知识好好看全,当然范围广了,知识点的难度就自然降低了,所以同学们不用担心,把历年真题好好研究透了,基本就没什么太大的问题,真正了解了命题老师的出题类型、出题思路,这样你就可以在考场取得胜利。 2.考试题型与分值 大家要了解有哪些题型,每个题型的分值。从最近几年看,09年包括09年之前是有选择题的,然而10年以后北理工的自控真题都是大题,并且从08年以后试卷已经不外流,所以08年以后真题我们只有回忆版,但是根据这些回忆版我们也不难推出这些题目的难易程度和出处,只要跟着我们的分析走,相信你可以取得理想的分数。 3.真题的重要性 北理工的专业课都是有考试大纲的,凡是考试大纲里面出现的内容,无论难度怎样,我们都必须逐一弄懂,但是大家可以通过对历年真题的分析得出历年所考的常考知识点和重点知识点,掌握各个章节在整个考研中的重要地位。例如,近几年才重点考察的相平面和最优控制,就以后而言属于必考题型,所以历年真题的复习是专业课复习的重中之重,任何书本都比不上真题,真题做到3遍都不为过,通过对近10年的真题分析,你一定可以把握复习的重点,从而取得理想的成绩。 4.重要的已考知识点 考研专业课试卷中,很多考点考题会反复出现,一方面告诉大家这是重点,另一方面也可以帮助大家记忆重要知识点,灵活的掌握各种答题方法。对于反复考查的知识点,一定不要局限于答案,题目的形式和内容可以千变万化,但是核心的知识点和方法论是不会改变的,所以我们要灵活的掌握重要的知识点,知道出题者想要考察的到底是什么,
2017年考研政治模拟试题及答案
2017年考研政治模拟试题及答案 2017年考研政治模拟试题及答案 单项选择题(下列每题的选项中,只有一项最符合题意。) 1.唐代诗人刘禹锡有诗云:“沉舟侧畔千帆过,病树前头万木春。”其蕴含的哲理是() A.矛盾是事物发展的动力 B.发展的实质是新事物的产生和旧事物的灭亡 C.事物之间是普遍联系的 D.事物的发展是量变和质变的统一 2.联系是指事物内部各要素之间和事物之间相互影响、相互制约和相互作用的关系。辩证联系的前提是() A.事物之间的区别 B.事物的相互过渡 C.事物的相互依存D.事物的相互转化 3.凡真实的联系都是事物本身所固有的联系,而不是人们强加给事物的主观臆想的联系。这种情况主要说明,联系是() A.客观的 B.普遍的 C.复杂多样的 D.关系范畴 4.事物运动变化的基本趋势是() A.联系B.发展 C.矛盾D.质变答案及解析 1.【答案】B 【解析】本题考查的知识点:发展的实质唯物辩证法是关于世界普遍联系和永恒发展的科学。肯定世界的普遍联系和永恒发展,是唯物辩证法的总特征。依照唯物辩证法,包括自然、人类社会和人类自身在内的整个世界的一切事物和现象,都处在普遍的联系和运
动、变化、发展之中。联系的观点和发展的观点是唯物辩证法的基本观点和总特征。其中,发展是前进的上升的运动,发展的实质是新事物的产生和旧事物的灭亡。新事物是指合乎历史前进方向、具有远大前途的东西;旧事物是指丧失历史必然性、日趋灭亡的东西。在本题中,诗句“沉舟侧畔千帆过,病树前头万木春”表达的是新旧事物之间转换的意思,体现了发展的实质的哲理。所以,本题的正确答案是选项B。最近几年的考试中经常会有以名人名言或诗句命制的题目,很多考生一见到这样的题目就会大脑一片空白,根本找不到解题头绪。其实,答这类题的时候并不要逐字逐句的进行翻译,通常可以通过找关键词和核心词的方法,快速解题,起到事半功倍的效果。 2.【答案】A 【解析】本题考查的知识点:联系的含义作为唯物辩证法的两大特征之一,联系是指事物内部各要素之间和事物之间相互影响、相互制约和相互作用的关系。辩证联系是以事物之间的区别为前提的,相互区别的事物又通过联系而相互过渡。辩证法要求在区别中看到联系,在联系中看到区别。如果世界上的`事物相互之间没有任何区别,没有相对的界限,那么,它们将是一团混沌,也就没有任何联系可言了。承认事物相互之间的区别和界限,决不能否认事物相互之间的联系,否认它们的相互过渡和转化。如果说,只承认事物的相互区别和界限而不承认事物的联系和转化,就
自动控制考研胡寿松《自动控制原理》考研真题与考点
自动控制考研胡寿松《自动控制原理》考研真题与考 点复习 第一部分考研真题精选与解析 一、单选题 1线性系统的主要特点有()。[华中科技大学2009年研] A.稳定性 B.振荡性 C.收敛性 D.齐次性 【答案】DXXXX 【解析】线性系统的重要性质是可以应用叠加原理,叠加原理有两重含义,既具有可叠加性和齐次性。 2对控制作用进行适当的补偿(复合控制),可使系统()。[湖南大学2006年研] A.由不稳定变成稳定 B.减小非线性的影响 C.提高无差度 D.同时改善快速性和抗干扰能力 【答案】DXXXX
【解析】复合控制只要参数选择合适,不仅可以改善快速性,还能保持系统稳定,减小稳态误差、抑制几乎所有可测量扰动。 3在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。[杭州电子科技大学2008年研] A.开环传递函数 B.反馈通道 C.前向通道 D.闭环传递函数 【答案】CXXXX 【解析】前向通道是指闭环系统中,从系统输入量到系统被控制量之间的通道。因此控制器和控制对象就组成了通常闭环控制系统的前向通道。 4系统的传递函数与下列因素有关()。[华中科技大学2009年研] A.系统结构 B.初始条件 C.系统结构和参数 D.系统结构、参数和初始条件 【答案】CXXXX 【解析】传递函数是一种用系统参数表示输出量与输入量之间关系的表达式,它只取决于系统或元件的结构和参数,而与输入量的形式无关,也不反应系统内部的任何信息。
5传递函数的概念除了适用于线性定常系统之外,还可用于描述()系统。[杭州电子科技大学2008年研] A.线性时变 B.非线性定常 C.非线性时变 D.以上都不是 【答案】DXXXX 【解析】传递函数定义为线性定常系统零初始条件下,系统输出量与输入量的拉氏变换之比,只适用于线性定常系统。 6下面系统中属于线性系统的是()。[东南大学研] 系统1:y=3u+2;系统2:y=usint A.1和2 B.1 C.2 D.都不是 【答案】DXXXX 【解析】系统(1)和系统(2)不满足线性系统叠加原理,故都不是线性系统,答案为D。 7设f(t)=te t·1(t),则F(s)=()。[清华大学研]
自动控制原理 2016年考研题
河北大学2016年硕士研究生入学考试试卷 一、填空题(共30分,1-7题每空1分,8-11题每空2分,答案一律写在答题纸上) 1、经典控制理论中,描述系统运动的数学模型主要有 和 ;现代控制理论中,描述系统运动的数学模型为 ,其中包括 方程和 方程。 2、系统的 响应代表由系统的初始状态所引起的系统的自由运动;系统的 响应代表由系统的输入所激励的强制运动。 3、设单位反馈系统的开环传递函数为,) 12(10)(+=s s s G 当系统的输入为单位阶跃信号l(t)时,系统的静态误差为 ;单位斜坡输入时,系统的静态误差为 ;单位加速输入时,系统的静态误差为 。 4、某系统特征多项式为 )44)(1(2+++s s s ,则系统的固有运动模态为 、 和 。 5、离散控制系统的数学模型主要有 和 。 6、根据系统分频段设计思想,低频段主要考虑系统的 特性,中频段主要考虑系统的 性,高频段主要考虑系统的 能力。 7、系统状态反馈不能够改变 的特征多项式和特征值,输出反馈不能够改变 的特征多项式和特征值。 8、某传递函数为) 1(2)(+= s s s G 的系统,若输入信号为)60sin()( +=t t r ,其稳态输出为 。 9、已知系统的传递函数为 1 21+s ,则系统的单位脉冲响应为 。 10、已知系统的传递函数为2513)(23++++=s s s s s G ,写出系统的能控标准型实现 ,能观标准型实现 。 11、用C(z)表示以下采样系统的输出为 。 二、简答题(共30分,每题10分) 1、说明稳定裕量的定义,以开环传递函数) 1)(11.0(1)(++=s s s s G 为例子BODE 图和NYQUIST 图中标出相角稳定裕量和增益稳定裕量。 2、以下是通过改变载热介质流量进行出口温度控制的系统流程,请画出温度控制系统方框图,并说明每个方框的作用。如果冷物料流量发生变化,对系统产生什么影响?请绘制在结构图中。
2017考研政治毛中特分析题
2017考研政治毛中特分析题 作者:@钟方源 万能模版 毛中特无论答什么,都要写: 我们要以全面建成小康社会、全面深化改革、全面依法治国、全面从严治党四个全面战略布局思想为指导, 协调推进经济建设、政治建设、文化建设、社会建设、生态文明建设五位一体, 落实创新、协调、绿色、开放、共享的发展理念。 实在写不出,再加上: 有利于增进人民福祉、促进人的全面发展 有利于树立道路自信、理论自信、制度自信、文化自信四个自信 能够符合中国的国情, 能够保障人民的根本利益,体现了社会主义的本质要求, 能够有效促进共同富裕, 能够提高综合国力, 实现中华民族伟大复兴的中国梦。 促进新型工业化、信息化、城镇化、农业现代化同步发展 有利于推进供给侧结构性改革,有利于三去一降一补(去产能、去库存、去杠杆、降成本、补短板) 有利于建设以富强民主文明和谐自由平等公正法治爱国敬业诚信友善为内容的社会主义核心价值观
一、全面建成小康 (一)、如何理解2020年全面建成小康社会“是实现中华民族伟大复兴中国梦的关键一步”?{重要性} ①第一,2020年全面建成小康社会就实现了党制定的两个百年目标的第一个目标; ②第二,到2020年实现这个目标,我们国家的发展水平就会迈上一个大台阶,这为实现第二个目标打下坚实基础。 ③全面小康、民族复兴,是两个紧密联系、相互交融的目标任务。没有全面小康的实现,民族复兴就无从谈起。{谈二者关系} 所以,2020年实现全面建成小康社会的目标是实现中华民族伟大复兴中国梦的重要里程碑和“关键一步”。{总结归纳} (二)、如何理解“小康不小康,关键看老乡”? ①之所以说“小康不小康,关键看老乡”,是因为2020年我们要建成的全面小康社会,{全面指的是什么} 1)覆盖的领域要全面,是五位一体全面进步的小康,{一项不能少} 2)覆盖的人口要全面,是惠及全体人民的小康,{一个不能少} 3)覆盖的区域要全面,是城乡共同发展的小康。{一处不能少} 而目前我国农村还有五千多万贫困人口没有解决,几百个贫困县没有摘帽,这是全面建成小康社会的重点和难点。 ②我们不能一边宣布全面建成了小康社会,另一边还有几千万人口的生活水平处于扶贫标准线以下,这1)既影响人民群众对全面建成小康社会的满意度,2)也影响国际社会对我国全面建成小康社会的认可度。{为什么是关键} ③消除贫困、改善民生、逐步实现共同富裕,是社会主义的本质要求,是我们党的重要使命。{如何解决} 扶贫开发1)事关全面建成小康社会,2)事关增进人民福祉,3)事关巩固党的执政基础,4)事关国家长治久安,5)事关我国国际形象。 打赢脱贫攻坚战,1)是促进全体人民共享改革发展成果、逐步实现共同富裕的重大举措,2)是体现中国特色社会主义制度优越性的重要标准,3)也是经济发展新常态下扩大国内需求、促进经济增长的重要途径。 (三)、结合材料,联系协调发展理念,说明全面建成小康为什么要“全力做好补齐短板这篇大文章”? ①协调是持续健康发展的内在要求。协调发展注重的是解决发展不平衡问题。协调既是发展手段又是发展目标,同时还是评价发展的标准和尺度,协调1)是发展两点论和重点论的统一;2)协调是发展平衡和不平衡的统一;3)是发展短板和潜力的统一。树立协调发展理念,就必须牢牢把握中国特色社会主义事业总体布局,正确处理发展中的重大关系,不断增强发展整体性。协调发展,就要找出短板,在补齐短板上多用力,通过补齐短板挖掘发展潜力、增强发展后劲。{这段话联系协调发展理念角度}
浙江大学845自动控制原理考研真题试卷
紧急通知 本资料由浙江大学控制科学与工程学院16届专业课129分学长,也就是我本人亲自整理编排而成。大家可以叫我学长,年龄比我大的辞职考的可以叫我小弟。资料不同于市面上那些看起来非常诱人实则是粗制烂造的资料,而是以一个考过845自控的过来人的经验,完全从学生的体验出发,做到资料最全,资料最好,资料最精致。全套资料包括葵花宝典一到葵花宝典九共九本资料,每本资料都是我精心编辑整理的,并做了精美的封面,一共650页完美打印发给大家,大家把这650从头到尾肯透了,再做下我推荐的几本资料书(16年有一道15分的大题就是上面的类似题,第三问很多高手都没做出来,注意不是周春晖那本哈),可以说完全没问题了。这是其它卖家不可能做到的。同时赠送845自控全套电子资料。葵花宝典一完全由我本人原创,里面包含了考浙大845自动控制原理的全部问题,比如考多少分比较保险,怎么复习,有哪些好的资料书,最近几年考题变化及应对策略,浙大常考题型,招生名额,复试资料,导师联系,公共课复习用书及方法以及845近年命题风格分析等一系列问题,全是我的心得和经验,方法,技巧等,说句心里话,我自己都觉得这些资料非常宝贵,能帮助学弟学妹们少走很多弯路。 注意:前面是一些关于我的故事,有些地方可能对你有用,如果不感兴趣,可以直接拉到后面去看,资料清单和图片都在后面。 学长自我介绍 学长姓邓,名某某,男,本科于14年毕业于四川大学电气信息学院自动化专业,考浙大控制考了3次,14年大三时第一次考浙大控制总分没过线。当时我们学校有三个同学征战浙大控制科学与工程,结果全军覆没,只有我一人过了300分,由此可见考浙大控制还是很有难度的,其中一个难点就是专业课的信息和专业课的命题走向的获取,当时我们都不是很清楚,蒙着头自己学,去图书馆借了很多自动控制原理的资料书来看,我自我感觉学得还不错,当时我一个同学考电子科大的自动化,经常跑来问我自控的问题,我基本都能给他解答出来,他说我好牛逼,觉对没有问题,然而最后的结果是他考电子科大自动控制原理137,而我只考了96分。后面我分析了一下,为什么会出现这样的情况最重要的就是我们对浙大的出题风格不是很了解,不知道它的命题方向和爱考的地方,方向都错了,怎么可能得高分虽然我把11年以前的真题都做了,但是浙大12年以后的命题风格和以前有所不同,所以还是无济于事。因此即使你的自控基础知识扎实,也未必能够得到高分,这里面有很多方法和技巧,都是我从后面的考试中慢慢总结出来的。 由于不甘心就这么与浙大失之交臂,所以决定二战,但是又不想向家里要钱了,因为学长家在贵州农村,经济条件不是很好。于是我选择平时晚上去给别人做家教,周末去给培训机构上课。这样的好处是我有大把的白天用来复习,只是晚上出去干干活。这个事就说到这里,不是主题。15年专业课考了113,一个中等的分数,本来可以考130,但是为什么没有考到,这些原因我都在葵花宝典一中给大家分析了,希望大家能我的身上汲取经验,别步我的后尘。但是15年死在英语不过线上,差3分,这是我怎么也没有想到的,学长英语虽然不能说特别好,但是最起码四六级大一就过了,高考英语还是我们小县城的单科第一名(山中无老虎),第一年也考了65分。这是我怎么也没有想到的,所以有的时候感觉
2020年考研政治模拟试题及答案
2017年考研政治模拟试题及答案 1.唐代诗人刘禹锡有诗云:“沉舟侧畔千帆过,病树前头万木春。”其蕴含的哲理是() A.矛盾是事物发展的动力 B.发展的实质是新事物的产生和旧事物的灭亡 C.事物之间是普遍联系的 D.事物的发展是量变和质变的统一 2.联系是指事物内部各要素之间和事物之间相互影响、相互制约和相互作用的关系。辩证联系的前提是() A.事物之间的区别 B.事物的相互过渡 C.事物的相互依存 D.事物的相互转化 3.凡真实的联系都是事物本身所固有的联系,而不是人们强加给事物的主观臆想的联系。这种情况主要说明,联系是() A.客观的 B.普遍的 C.复杂多样的 D.关系范畴 4.事物运动变化的基本趋势是() A.联系 B.发展 C.矛盾 D.质变 答案及解析 1.【答案】B 【解析】本题考查的知识点:发展的实质 唯物辩证法是关于世界普遍联系和永恒发展的科学。肯定世界的普遍联系和永恒发展,是唯物辩证法的总特征。依照唯物辩证法,包括自然、人类社会和人类自身在内的整个世界的一切事物和现象,都处在普遍的联系和运动、变化、发展之中。联系的观点和发展的观点是唯物辩证法的基本观点和总特征。 其中,发展是前进的上升的运动,发展的实质是新事物的产生和旧事物的灭亡。新事物是指合乎历史前进方向、具有远大前途的东西;旧事物是指丧失历史必然性、日趋灭亡的东西。在本题中,诗句“沉舟侧畔千帆过,病树前头万木春”表达的是新旧事物之间转换的意思,体现了发展的实质的哲理。所以,本题的正确
答案是选项B。 最近几年的考试中经常会有以名人名言或诗句命制的题目,很多考生一见到这样的题目就会大脑一片空白,根本找不到解题头绪。其实,答这类题的时候并不要逐字逐句的进行翻译,通常可以通过找关键词和核心词的方法,快速解题,起到事半功倍的效果。 2.【答案】A 【解析】本题考查的知识点:联系的含义 作为唯物辩证法的两大特征之一,联系是指事物内部各要素之间和事物之间相互影响、相互制约和相互作用的关系。辩证联系是以事物之间的区别为前提的,相互区别的事物又通过联系而相互过渡。辩证法要求在区别中看到联系,在联系中看到区别。如果世界上的事物相互之间没有任何区别,没有相对的界限,那么,它们将是一团混沌,也就没有任何联系可言了。承认事物相互之间的区别和界限,决不能否认事物相互之间的联系,否认它们的相互过渡和转化。如果说,只承认事物的相互区别和界限而不承认事物的联系和转化,就会犯形而上学的错误;那么,只承认事物的联系和转化而不承认事物相互之间的区别和界限,则是相对主义和诡辩论。所以,本题的正确答案为选项A。 选项BCD错误。相互过渡、相互依存、相互转化也一定是以事物之间的区别为前提的。 3.【答案】A 【解析】本题考查的知识点:联系的特点 联系是指事物内部各要素之间和事物之间相互影响、相互制约和相互作用的关系。联系具有客观性,事物的联系是事物本身所固有的,不是主观臆想的。世界上没有孤立存在的事物,每一种事物都是和其他事物联系着而存在的,这是一切事物的客观本性。坚持联系的客观性,要求我们从事物的固有联系中去把握事物,切忌主观随意性。所以,本题的正确答案是选项A。 选项B错误。联系具有普遍性指的是,任何事物内部的不同部分和要素是相互联系的;任何事物都不能孤立存在,都同其他事物处于一定的相互联系之中;整个世界是相互联系的统一整体,每一事物都是世界普遍联系中的一个成分或环节,并通过它表现出联系的普遍性。
自动控制原理考试试卷
自动控制原理试题 2. (10分)已知某系统初始条件为零,其单位阶跃响应为)0(8.08.11)(94≥+-=--t e e t h t t , 试求系统的传递函数及单位脉冲响应。 3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。K 表示开环增益。P 表示开环系统极点在右半平面上的数目。v 表示系统含有的积分环节的个数。试确定闭环系统稳定的K 值的范围。 4.(12分)已知系统结构图如下,试求系统的传递函数 ) (, )(s E s C 1.(10分)已知某单位负反馈系统的开环传递函数为) 5(4 )(+=S S s G ,求该系统的单位脉冲 响应和单位阶跃响应。 3.(10分)系统闭环传递函数为2 22 2)(n n n s s G ωξωω++=,若要使系统在欠阻尼情况下的单位阶跃响应的超调量小于16.3%,调节时间小于6s ,峰值时间小于6.28s ,试在S 平面上绘出满足要求的闭环极点可能位于的区域。(8分) ,3==p v (a ) ,0==p v (b ) 2 ,0==p v (c ) 题4图 题2图
6. (15分)已知最小相位系统的对数幅频特性曲线如下图所示(分段直线近似表示) 1、.(10分)已知某单位负反馈系统的开环传递函数为 ) 5( 6 ) (+=s s s G ,试求系统的单位脉 冲响应和单位阶跃响应。 3、(10分)已知系统的结构图如下,试求: (1) 开环的对数幅频和相频特性曲线; (2) 单位阶跃响应的超调量σ%,调节时间ts ; (3) 相位裕量γ,幅值裕量h 。 7.(15分)已知系统结构图如下图所示,试求传递函数) () (, )()(s R s E s R s C 。 (1) 试写出系统的传递函数G(s); (2) 画出对应的对数相频特性的大致形状; (3) 在图上标出相位裕量Υ。
控制原理考研胡寿松《自动控制原理》配套考研真题库
控制原理考研胡寿松《自动控制原理》配套考研真题 库 一、第一部分真题 一、填空题 相平面的概念:______。[燕山大学研] 【答案】设一个二阶系统可以用下面的常微分方程来描述。其中是x和的线性或非线性函数。在一组非全零初始条件下,系统的运动可以用解析解x(t)和描述。如果取x和构成坐标平面,则系统的每一个状态均对应于该平面上的一点,这个平面称相平面。 二、问答题 1对控制系统进行校正时,在什么情况下,不宜采用串联超前校正?为什么?[华中科技大学研] 答:在系统的快速性满足要求而稳定性不满足要求或快速性已经达到要求而希望系统的动态响应超调量不太大时不宜采用超前校正,因为超前校正会改善系统的快速性,同时会使系统的稳态性能变差,有高频噪声信号时亦不宜使用。 2对于超前、滞后、滞后-超前三类校正装置: (1)分别阐述其控制功能; (2)对于PI控制、PID控制、PD控制,分别属于上述二三类校正装置的哪一类?为什么?[武汉大学研]
答:(1)超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能。通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性,但会使得系统对高频噪声的抑制能力减小,抗干扰能力下降。 滞后校正通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。缺点是会使系统响应速度变慢。 滞后超前校正装置综合了超前校正装置和滞后校正装置的特点,当系统的动态性能和稳态性能都达不到要求时,可以考虑使用滞后超前校正装置; (2)PI属于滞后校正装置,因为它具有相位滞后作用;PD属于超前校正装置,因为它可以提高超前相角;PID属于滞后超前校正装置,因为其在低频段具有滞后效应,中频段具有超前效应。 3在计算机控制系统中,常采用增量PID算法。与位置PID算法相比较,说明两者的差别及其使用特点。[重庆大学研] 答:增量型PID算法的输出值是两采用时刻间的差,即相对值,增量式算法优点:①算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;②计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;③手动-自动切换时冲击小。当控制从手动向自动切换时,可以做到无扰动切换。对于位置式PID控制算法,当前采样时刻的输出与过去的各个状态有关,
自动控制原理考试试题库(完整资料).doc
此文档下载后即可编辑 期末复习题 概念题 一、 填空题 1、把输出量直接或间接地反馈到输入端,形成闭环参与控制的 系统,称作 闭环控制系统 。 2、传递函数反映系统本身的瞬态特性,与本身参数和结构 有 关 ,与输入和初始条件 无关 。 3、最大超调量只决定于阻尼比ξ,ξ越小,最大超调量越 小 。 4、已知系统频率特性为 1 51+ωj ,当输入为t t x 2sin )(=时,系统的 110) t tg --。 5、校正装置的传递函数为Ts aTs s G c ++=11)(,系数a 大于1,则该校正 装置为 超前 校正装置。 6、如果max ω为)(t f 函数有效频谱的最高频率,那么采样频率s ω满足条件max 2s ωω≥ 时,采样函数)(*t f 能无失真地恢复到原来的连续函数)(t f 。 二、 单选题 1、闭环控制系统的控制方式为 D 。 A. 按输入信号控制 B. 按扰动信号控制 C. 按反馈信号控制 D. 按偏差信号控制 2、某一系统在单位速度输入时稳态误差为零,则该系统的开环传递函数可能是 D 。
A. 1 +Ts K B. ) )((b s a s s d s +++ C. ) (a s s K + D. ) (2a s s K + 3、已知单位反馈系统的开环奈氏图如图所示,其开环右半S 平面极点数P=0,系统型号1v =,则系统 A 。 A.稳定 B.不稳定 C.临界稳定 D. 稳定性不能确定 4、串联滞后校正是利用 B ,使得系统截止频率下降,从而获得足够的相角裕度。 A . 校正装置本身的超前相角 B .校正装置本 身的高频幅值衰减特性 C .校正装置本身的超前相角和高频幅值衰减 D .校正装置富裕的稳态性能 5、设离散系统闭环极点为i i i z j σω=+,则 C 。 A .当0i ω=时,其对应的阶跃响应是单调的; B .当0i σ<时,其对应的阶跃响应是收敛的; C .当1<时,其对应的阶跃响应是收敛的; D .当0i ω=时,其对应的阶跃响应是等幅振荡。 三、 是非题 1、 对于线性定常负反馈控制系统, (1) 它的传递函数随输入信号变化而变化 ( × )
华南理工自动控制原理考研试题集锦
813自动控制原理考试大纲 硕士研究生招生考试 《自动控制原理》考试大纲 考试科目代码: 813 适用招生专业:机械制造及其自动化机械电子工程机械设计及理论 特别提示: 需带无储存功能的计算器 一、考试内容 1. 自动控制的一般概念 掌握自动控制系统的一般概念, 重点是开环控制和闭环控制的概念, 理解对控制性能的基本要求, 了解各种典型控制系统的工作原理及控制理论的发展过程。 2. 自动控制系统的数学模型 掌握控制系统的数学模型的基本概念, 了解微分方程一般建立方法, 理解传递函数的定义和性质, 掌握动态结构图的建立和化简规则。知识点为: 传递函数的定义和性质, 典型环节的传递函数, 动态结构图的建立, 动态结构图的化简, 自动控制系统的传递函数。 3. 自动控制系统的时域分析方法 了解和掌握经典控制理论最基本的方法之一时域分析法, 能够用该方法分析控制系统的各种控制性能(包括稳定性, 快速性和稳态精度)。知识点为: 典型控制过程及性能指标, 一阶系统分析, 二阶系统分析, 高阶系统的低阶化,稳定性与代数判据, 稳态误差分析。 4. 自动控制系统的频域分析方法 要求掌握各种系统和环节的幅相频率特性和对数频率特性的画法, 并能通过频率特性分析控制系统的控制性能。知识点为: 典型环节的频率特性,系统开环频率特性,乃奎斯特稳定判据及对数稳定判据,稳定裕度及计算,系统闭环频率特性。 5. 自动控制系统的校正装置综合
在对控制系统的控制性能进行分析的基础上, 对控制性能的改进就涉及到系统的校正。要求在建立控制系统校正的一般概念的基础上, 对串联校正, 反馈校正, 前置校正有较为全面的理解。掌握频率法校正的一般方法。知识点为: 控制系统校正的概念,串联校正、反馈校正和前置校正在校正中的应用。 二、考试题型(分值,按150分计) 1、填空(25 分) 2、简答题(15 分) 3、计算及分析题(80分) 4、综合应用题(30分)
西北工业大学 自动控制原理考研真题
2013西工大821自动控制原理专业课回忆版 共6道大题: 1.常规时域题,利用程序框图,r(t),n(t),tr,等求三个未知数k1,k2,t 2.常规根轨迹题目,用到D来求原式子,然后加入gc画出根轨迹图 3.求稳态cst的,教案上习题应用,好像是分别求模值大小和角度即可 4.常规pid校正,不过第二问让文字分析描述本题中的三频段 5.常规题,第一问z变换就可以算出,第二问i型求误差 6.常规利用na,gs求k和t,算出即可
2012西北工业大学自动控制原理回忆版 第一题:典型闭环系统加入了前馈控制并且含有未知数t,典型闭环控制开环增益k未知。 (1)当未知数t k为何值是系统等幅震荡 (2)当系统为一阶无差系统求满足的t k (3)利用闭环主导极点化简系统方程求超调量和调节时间 第二题:直接给出特征方程:三次,含有未知数k t (1)系统有三重负实根确定k t (2)利用求出来的t确定k从0——无穷的根轨迹(参数根轨迹)其中求出渐近线,和分离点 第三题:系统两个转接频率2和18中间斜率为—20且高频延长线交为12,初始相角和末都是—180 第一问画出概略对数幅频曲线。 第二问确定开环传函 第三问是求截止频率和相角裕度 第四问忘了 第四题:不是典型的校正题没做出来其中给出了校正图G1(S)未知知和G(S)=1除(S+1)串联.让确定函数其中要求在n(t)干扰下的误差为0和kv为12还有就是保持截止频率而增大相角裕度为40但是根据G(s)我不知怎么求截止频率 第五题:常规题但是其中有利用到差分方程求误差 第六题:典型的1+N(a)G(s)=0不过N(a)是含有虚部的那个4mpeih那个 求自震频率和幅值和K变化时对两者影响
[全]自动控制原理考研真题详解
自动控制原理考研真题详解 1线性系统的主要特点有()。[华中科技大学2009年研] A.稳定性 B.振荡性 C.收敛性 D.齐次性 【答案】D查看答案 【解析】线性系统的重要性质是可以应用叠加原理,叠加原理有两重含义,既具有可叠加性和齐次性。 2对控制作用进行适当的补偿(复合控制),可使系统()。[湖南大学2006年研] A.由不稳定变成稳定 B.减小非线性的影响 C.提高误差度 D.同时改善快速性和抗干扰能力
【答案】D查看答案 【解析】复合控制只要参数选择合适,不仅可以改善快速性,还能保持系统稳定,减小稳态误差、抑制几乎所有可测量扰动。 3在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。[杭州电子科技大学2008年研] A.开环传递函数 B.反馈通道 C.前向通道 D.闭环传递函数 【答案】C查看答案 【解析】前向通道是指闭环系统中,从系统输入量到系统被控制量之间的通道。因此控制器和控制对象就组成了通常闭环控制系统的前向通道。 4系统的传递函数与下列因素有关()。[华中科技大学2009年研] A.系统结构 B.初始条件
C.系统结构和参数 D.系统结构、参数和初始条件 【答案】C查看答案 【解析】传递函数是一种用系统参数表示输出量与输入量之间关系的表达式,它只取决于系统或元件的结构和参数,而与输入量的形式无关,也不反应系统内部的任何信息。 5传递函数的概念除了适用于线性定常系统之外,还可用于描述()系统。[杭州电子科技大学2008年研] A.线性时变 B.非线性定常 C.非线性时变 D.以上都不是 【答案】D查看答案 【解析】传递函数定义为线性定常系统零初始条件下,系统输出量与输入量的拉氏变换之比,只适用于线性定常系统。
2017 考研政治真题及答案
参考答案 一、单项选择题116小题每小题1分共16分。下列每题给出的四个选项中只有一个选项是符合题目要求的。请在答题卡上将所选项的字母涂黑。 1.恩格斯说“鹰比人看得远得多但是人的眼睛识别东西远胜于鹰。狗比人具有敏锐得多的嗅觉但是它连被人当做各种物的特定标志的不同气味的百分之一也辨别不出来。”人的感官的识别能力高于动物除了人脑及感官发育得更加完善之外还因为 A人不仅有感觉还有思维 B人不仅有理性还有非理性 C人不仅有知觉还有想象 D人不仅有生理机能还有心理活动 1.【答案】A 2.有这样一道数学题90%×90%×90%×90%×90%=其答案是约59%。90分看似一个非常不错的成绩然而在一项环环相扣的连续不断的工作中如果每个环节都打点折扣最终得出的成绩 就是不及格。这里蕴含的辩证法道理是 JcbS6LA3On A肯定中包含否定 B量变引起事变 C必然性通过偶然性开辟道路 D可能和现实是相互转化的 2.【答案】A 3、在资本主义社会里资本家雇佣工人进行劳动并支付相应的 工资。资本主义工资的本质是 A.工人所获得的资本家的预付资本 B.工人劳动力的价值或价格 C.工人所创造的剩余价值的一部分
D.工人全部劳动的报酬 3.【答案】B 4、2018年9月以来美国爆发的“占领华尔街”抗议活动中示威者打出“我们是99%”的标语向极富阶级表示不满。漫画所显示的美国社会财富占有的两极分化是资本主义制度下 A劳资冲突的集中体现 JcbS6LA3On B生产社会化的必然产物 C资本积累的必然结果 D虚拟资本泡沫化的恶果 4.【答案】C 5、毛泽东曾在不同场合多次谈到调查研究由两种方法一种是走马看花一种是下马看花。走马看花不深入还必须用第二种方法就是下马看花过细看花分析一朵花。毛泽东强调“下马看花”的实际意义在于 JcbS6LA3On A解决实际问题必须要有先进理论的指导 B运用多种综合方法分析调查研究的材料 C马克思主义理论必须适合中国革命的具体实际 D只有全面深入了解中国的实际才能找出规律 5.【答案】D 6、改革开放以来我们党对公有制认识上的一个重大突破就是明确了公有制和公有制的实现形式是两个不同层次的问题。公有制的实现形式是指资产或资本的 JcbS6LA3On
《自动控制原理》考研胡寿松版2021考研真题库
《自动控制原理》考研胡寿松版2021考研真题库第一部分考研真题精选 一、填空题 相平面的概念:______。[燕山大学研] 【答案】设一个二阶系统可以用下面的常微分方程来描述。其中是x和的线性或非线性函数。在一组非全零初始条件下,系统的运动可以用解析解x(t)和描述。如果取x和构成坐标平面,则系统的每一个状态均对应于该平面上的一点,这个平面称相平面。 二、问答题 1对控制系统进行校正时,在什么情况下,不宜采用串联超前校正?为什么?[华中科技大学研] 答:在系统的快速性满足要求而稳定性不满足要求或快速性已经达到要求而希望系统的动态响应超调量不太大时不宜采用超前校正,因为超前校正会改善系统的快速性,同时会使系统的稳态性能变差,有高频噪声信号时亦不宜使用。 2对于超前、滞后、滞后-超前三类校正装置: (1)分别阐述其控制功能; (2)对于PI控制、PID控制、PD控制,分别属于上述二三类校正装置的哪一类?为什么?[武汉大学研] 答:(1)超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能。通过加入超前校正环节,利用其相位超前特性来增大
系统的相位裕度,改变系统的开环频率特性,但会使得系统对高频噪声的抑制能力减小,抗干扰能力下降。 滞后校正通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。缺点是会使系统响应速度变慢。滞后超前校正装置综合了超前校正装置和滞后校正装置的特点,当系统的动态性能和稳态性能都达不到要求时,可以考虑使用滞后超前校正装置; (2)PI属于滞后校正装置,因为它具有相位滞后作用;PD属于超前校正装置,因为它可以提高超前相角;PID属于滞后超前校正装置,因为其在低频段具有滞后效应,中频段具有超前效应。 3在计算机控制系统中,常采用增量PID算法。与位置PID算法相比较,说明两者的差别及其使用特点。[重庆大学研] 答:增量型PID算法的输出值是两采用时刻间的差,即相对值,增量式算法优点:①算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;②计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;③手动-自动切换时冲击小。当控制从手动向自动切换时,可以做到无扰动切换。对于位置式PID控制算法,当前采样时刻的输出与过去的各个状态有关,计算时要对e(k)进行累加,运算量大;而且控制器的输出u(k)对应的是执行机构的实际位置,如果计算机出现故障,u(k)的大幅度变化会引起执行机构位置的大幅度变化。