自动控制原理实验系统超前校正实验报告
实验五系统超前校正(4学时)
本实验为设计性实验
一、实验目的
1 ? 了解和观测校正装置对系统稳定性尺动态特性的影响。
2.学习校正装置的设计和实现方法。
二、实验原理
工程上常用的校正方法通常是把一个髙阶系统近似地简化成低阶系统,并从中找出少数典型系统作为工程设计的基础,通常选用二阶、三阶典型系统作为预期典型系统。只要掌握典型系统与性能之间的关系,根据设计要求,就可以设计系统参数,进而把工程实践确认的参数推荐为“工程最佳参数”,相应的性能确定为典型系统的性能指标。根据典型系统选择控制器形式和工程最佳参数,据此进行系统电路参数计算。
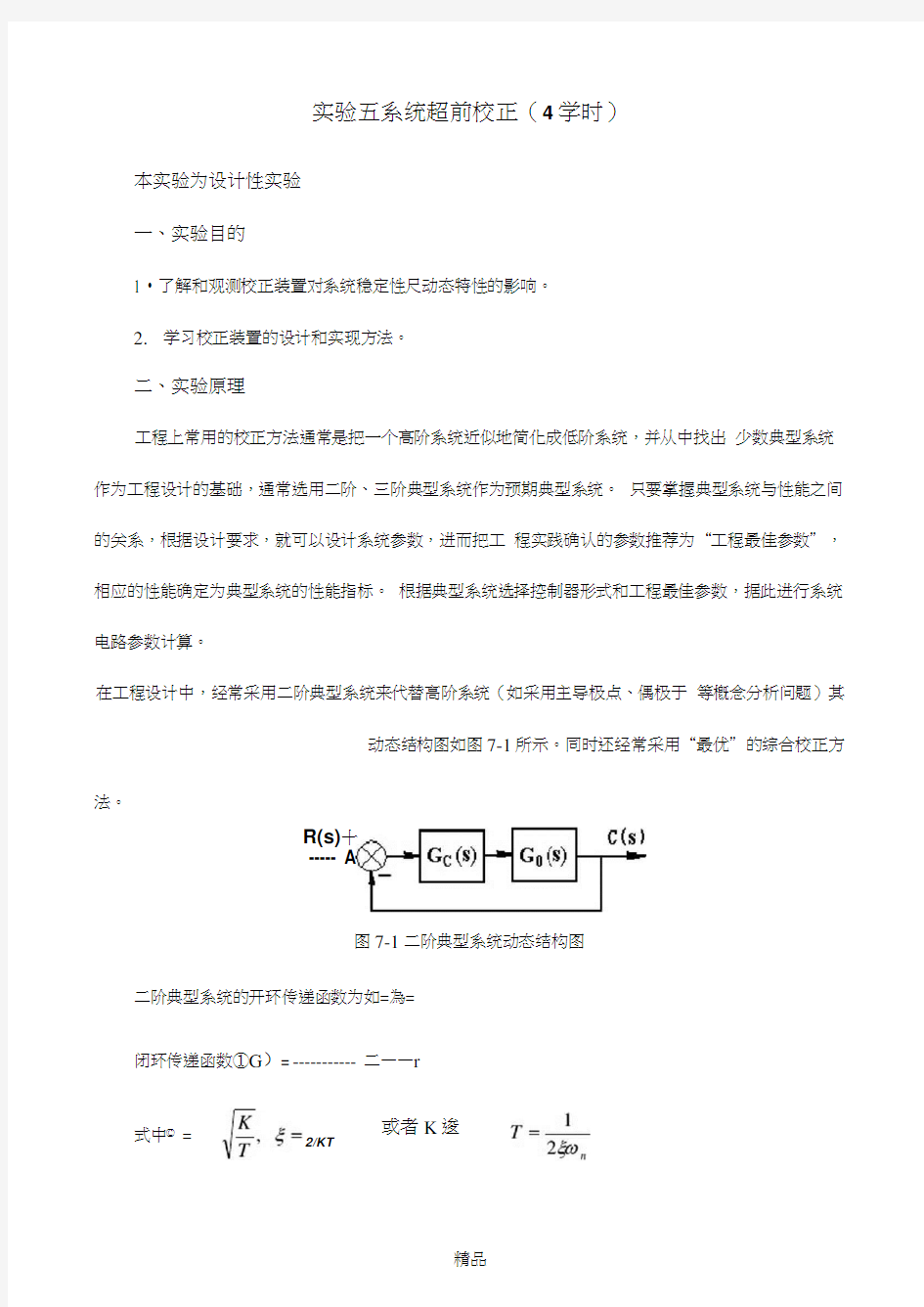
在工程设计中,经常采用二阶典型系统来代替高阶系统(如采用主导极点、偶极于等槪念分析问题)其
动态结构图如图7-1所示。同时还经常采用“最优”的综合校正方法。
图7-1二阶典型系统动态结构图
二阶典型系统的开环传递函数为如=為=
闭环传递函数①G)= ----------- 二——r
式中? =
2/KT 或者K逡
R(s)十 ----- A
二阶系统的最优模型
(1)最优模型的条件
根据控制理论,当§ = 0.707 =寻时,其闭环频带最宽,动态品质最奸。把防宁
乙厶代心鳩得到’或“》这就是进行校正的条件。
(2)最优模型的动态指标为
O-% = X100% = 43% , G = — ^ 4.3T
5
三、实验仪器及耗材
1?EL—AT3自动控制原理实验箱一台;
2 . PC机一台;
3.数字万用表一块
4 ?配真实验软件一宾。
四.实验内容及要求
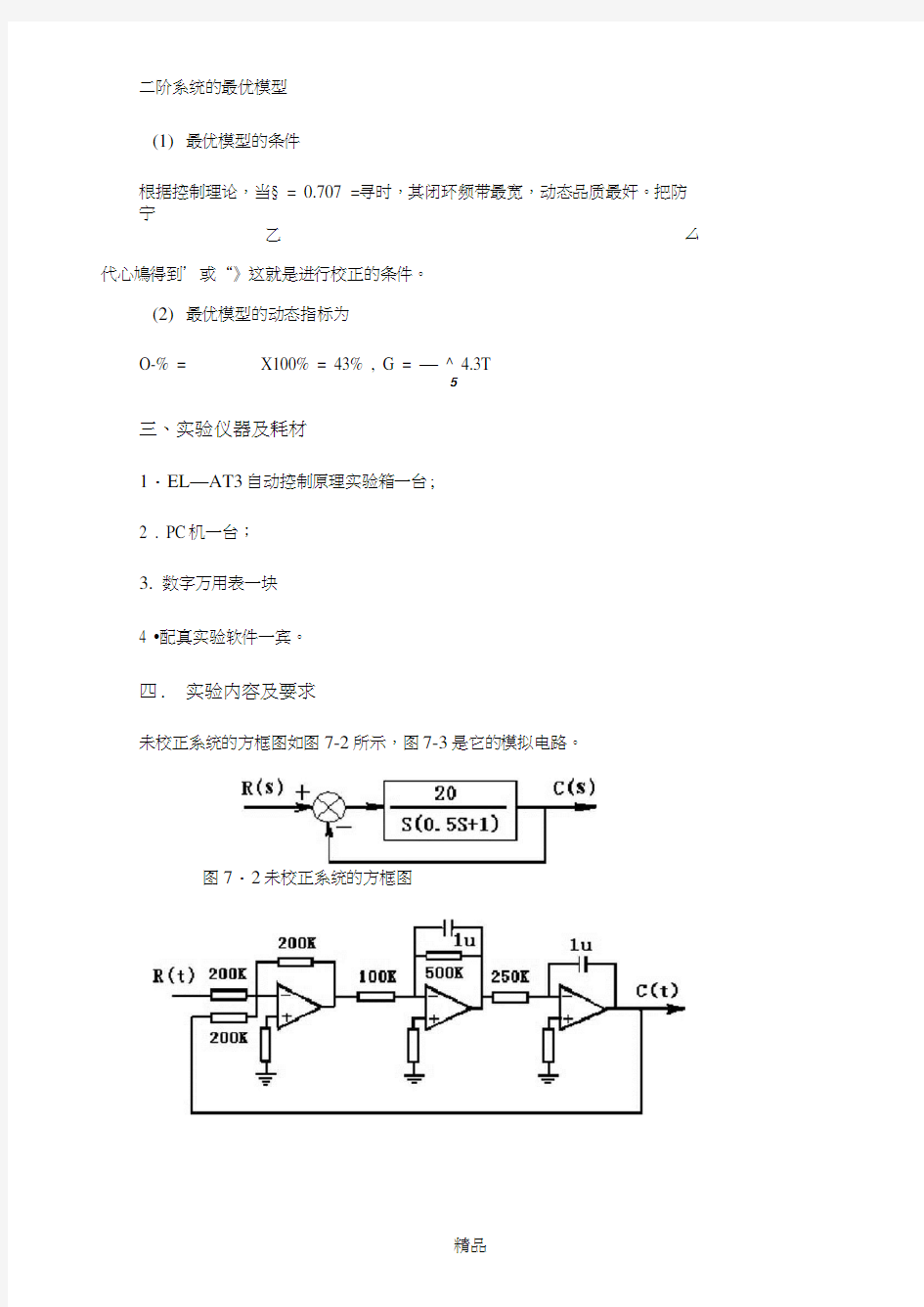
未校正系统的方框图如图7-2所示,图7-3是它的模拟电路。
图7?2未校正系统的方框图
未调整电路图
图7?3未校正系统的模拟电路
设计串联校正装賣使系统满足下述性能指标
U3
?
1 -
U1
VEE :: i 】
loakn :
200KQ
乙
12V
VCC
10:lOOkn
海a
—I[- 1uF
VCC
12V VCC ...
U2
OPAMP-5T VrRPJM.
加:…
OPAMI VEE :
K10 :x : R?
―Wv —1
? 100kO
:10:2DOIcQ
VT :
二 1;V0 V
5- sec 10
矫正后 R3
20QkQ VCC
—
12V VCC
10DkG
VEE
R8 ―Wv- ::
200k£):
Q …vcc
R3 1O0KQ R4- 200kO
R5 -- 200kD
VCC
—1
:VCC P 5T-VIRTUAL ? L ?? ?? ?
.R7. -V 心
500 kQ
TF- 1uF
R4 lOOkQ OPAr P 5T-VIRTUAL
? ? ? ? P ? ??.??
???
:
12V ? VE€
?12V
Circuit 1
OPAMP
...R2 —WV ?25DLD
5T VIRTUAt
R2 -V'/v :25DkQ :
5T VIRTUAt
■ * * 'U3' ■ ■
■
? I VEE
■ ? ■ ■ :12V ...
Tlh
tuF
OPflMP -5T VIRTUAL
VCC 12V
:R14 —VW
:
1bDliO
”旺…?
12V …
?13: V/v-
乂;
y2 dx CSV 1/ ix i/dy
1S2 .泊联朮
2.0533
2?7335 999?
287仙
2.5307 -S3 ?汕3血 387.^9Sln -18.5226
O ?OO3D ^.0000 -T25.69SS-
1.0576 0.0000 O ?0000
(1 )超调量 (3) 静态速度误差系数K y >20 1/秒 1. 测量未校正系统的性能指标 (1) 按图7-3接线; (2) 加入单位阶跃电压,观察阶跃响应曲线,并测出超调量b%和调节时间I 。 2. 根据系统性能要求设计校正网络 (1) 根据最优系统设计校正网络传递函数; (2) 根据传递函数设计校正网络元件参数。 3. 将设计好的校正网络加入到原系统中去,测畳校正后系统的性能指标 (1) 国出校正后系统的模拟电路,并正确接线; (2) 加入单位阶跃电压,观察阶跃响应曲线,并测出超调量b%和调节时间丄。 五、系统分析与设计 1. 未校正系统性能分析 原系统开环传递函数为:久(沪巫时 原系统开环增益K :=20,惯性环节时间常数T 产()?5 对照二阶系统标准式:咔) 、+2必+石 得:验 f 莎=6.32?。为系统的无阻尼自然振荡频率) 又2^0% =2,所以阻尼比:氨=1/%=()」58 未校正系统的超调量b%为:a% = 汐河x 100%?60% 20 原系统的闭环传递函数为:吋沪时E 40 52 +25 + 40 4 调节时间ts 为:仁=一二4秒 绍 系统静态速度误差系数K 严K 严20 1/秒 所以原系统不满足超调量b%55%,调节时间t$l 秒的性能指标,需要进行校正。 2. 校正网络的设计 本系统采用串联超前校正,校正网络的传递函数为: 校正后系统总的开环传递函数为 首先应该满足K=K v =20,由式(7?2)得:K=20K 「=2(),所以I 为了使校正后的系统是最优二阶系统,可以使式(7-2)的(CT + 1)与(0.5S + 1)相消(偶极 于原理)。所以,r=T,=0.5#o 根据最优二阶系统,T = 1/2A : =1/40=0.025秒。 因此,校正网络的传递函数:Gc (s)=Kc 駅二 ,)[丁[ Ts + \ 0.0255 +1 常用超前校正网络的结构如图7-4所示。 图7-4常用串联校正网络 图 7-4 中:K c = 化尹,r = ( +R 3)C , T 二R ;C (要求 R3?R1、R2) 傀 K l + K 2 ts + l Ts + \ 20K 「S + l) %)7(叫(沪7^? 肘 $(°.5w )(w ) G-2) T o o^s 取 C =10uf,贝IJ /?. = — = 一 =25OOQ = 2?5KC C 10x10" 取 R1=R2=100KO,则 (“J +/?jC?50xl03xl0x 10" = 0.5秒 RZ 由于 Ke =尺+忌= 200 = 1,所以 R.F200KQO &) R () 3. 验证校正后系统性能 根据上述设计参数,校正后系统的开环传递函数为 _ 40 40 则?=曲00 = 2&3,又2舸“=40,所以= ".707,是最佳阻尼比。 2co n 30.0 当二阶系统为最佳阻尼比时,<r% = 4.3%<5%, f, =4?3T = 4?3x0?025心0?11秒<1秒, 各项指标都满足性能要求。 4. 测11未校正系统的单位阶跃响应 按图7?3的模拟电路接线,当系统输入单位阶跃电压时,系统的输岀波形如图7?5 所示。 图7?5未校正系统的阶跃响应(贴你自己实验结果图,在图的边上或下面标注测最结果 G(s) = G {)(s)G c (s) = 20 5(0.025 5 +1) 闭环传递函数为①($) = 800 52 + 40s+ 800 750 00m- 2J0.00tn ? -2:0.00m - -750 00m- 5 T ? * x / \ M~、、、 / \ / ------- - XI 3?2700 yi 5.S052EV x2 635.3728m 丫2 €01.2537m dx -3?3"6 5 595口 1/dx -299.2S53m 1/dy 三.6794 roin x 0?0000 ItClX X ^.0000 itin y -二.0115 irax y €0?.€S€0in x Q ?OCOO offset y 0.0000 Circuit 1 Transient Analysis 2 Time (S) W) 5?加入校正网络后系统的模拟电路如下图所示 100K 丄100K 图7?5加入校正网络后的模拟电路 6.测量加入校正网络后系统的阶跃响应 按图7?5的模拟电路接线,当系统输入单位阶跃电压时,加入校正网络后系统的输岀波形如图7?6所示。 图7?6加入校正网络后系统的阶跃响应(贴你自己实验结果图,在图的边上或下面 标注测量结果) 结论:对于普通二阶系统,当系统动态性能不满足要求时,可以采用串联超前校正, 并 按二阶最优系统设计,实验验证了设计的正确性。 如有侵权请联系告知删除,感谢你们的配合!