伺服系统个人实验报告

实验一: SIMOTION和TCPU 配置
1.SIMOTION 配置
实验目的
1.掌握SIMOTION 设备和S120的工程配置
2.能够在电脑端控制电机的启停
实验设备
编程电脑一台、SIMOTION D425 设备一套、PLC+S120 设备一套
实验内容
A.创建项目并组态硬件
一、创建项目
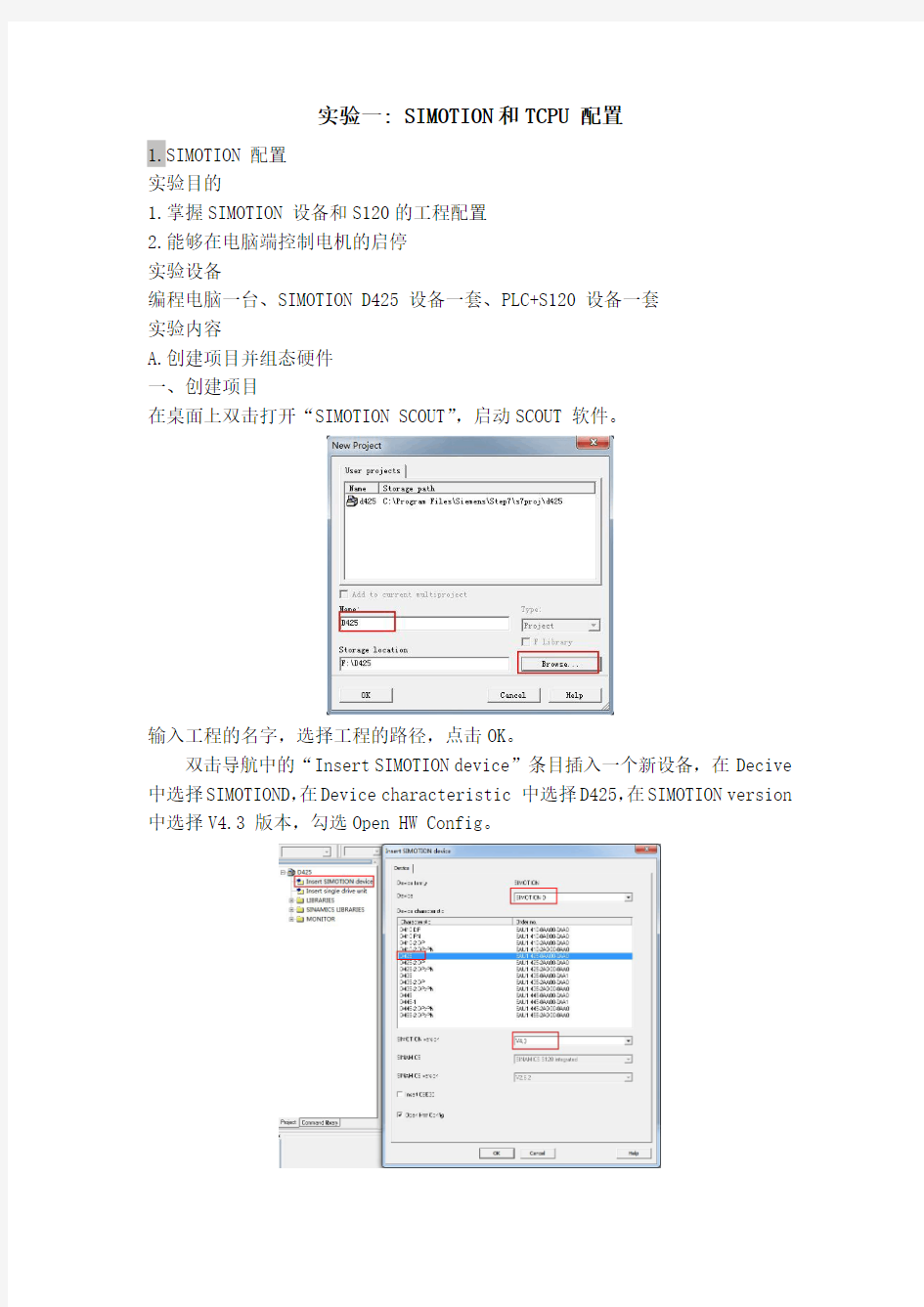
在桌面上双击打开“SIMOTION SCOUT”,启动SCOUT 软件。
输入工程的名字,选择工程的路径,点击OK。
双击导航中的“Insert SIMOTION device”条目插入一个新设备,在Decive 中选择SIMOTIOND,在Device characteristic 中选择D425,在SIMOTION version 中选择V4.3 版本,勾选Open HW Config。
设置编程电脑与SIMOTION 的连接方式,根据实际硬件的连线选择。选择以太网连接Ethernet IE1-OP(X120 端口),TCP/IP(AUto)协议。
二、网络组态
工程创建完成之后,会得到下图的画面,对网络进行组态。双击图中的蓝色条状区域X120 IE1-OP,设置SIOMTION 的IP 地址
点击按钮Properties,修改SIMOTION 的IP 地址
修改IP 地址,保证此处的IP 地址与编程电脑的IP 地址在一个网段内。
三、激活路由
1.设置路由
点击“Configure network”,进行设置路由操作。
双击上图右侧的PG/PC(1),设置IP 地址。IP 地址要和编程电脑的IP地址一致。
2.保存路由和下载路由
按下图所示,点击工具栏中的保存与编译按钮,没有错误后,再点击下载按钮,下载NetPro 组态到SIOMTION 中,使编程电脑可以和SIMOTION 中集成的驱动器通讯。
四、保存和下载硬件组态
点击View 按钮,寻找能够访问的节点,出现节点后选中该节点,点击OK。
B. 配置SINAMICS 驱动器
一、在线配置:
1.建立在线连接:在打开的画面中点击工具栏上的在线图标,在出现的画面中将D425 和Sinamics_Integrated 全选,点击OK 后即可自动建立连接。
2.启动自动组态:双击左侧树形工具栏中的“Automatic Configration(自
动组态)”条目,进行自动组态。
3.离线配置:点击工具栏中的离线按钮,让工程处于离线状态。
1)servo_02 离线配置
选择SERVO_02 目录下的Configrantion,界面右侧双击Configure DDS 按钮。各配置保持默认,唯一需要注意的是需要激活电源模块。
2)servo_03 离线配置:与servo_02 离线配置操作一样。
4.保存和下载组态
选择D425,点击工具栏中的保存和编译按钮,没有错误后;点击在线按钮,让工程处于在线状态;点击下载按钮,将工程下载到SIMOTION 设备中。
C.使用控制面板测试驱动器
1.获取控制权
打开SERVO_02>>Commissioning>Control panel(控制面板)。
在界面的底栏可以看到下图,点击“Assume Control Prioty(获取控制权)”
2.运转电机
启动SERVO_02,勾选”Enables(使能)”,给转速n 赋值,最后点击绿色按钮,SERVO_02 所接的电机就会运转起来。停止电机只需点击红色按钮即可。
3.放弃起控制权
测试完SERVO_02 后,取消勾选”Enables(使能)”,点击“Give up control prioty(放弃控制权)”即可。
2.TCPU 配置
A.连接到SINAMICS
一、创建Step7 项目
在桌面上双击打开“SINAMICS Manager”,创建一个新的项目并插入SIMATIC T 站点。CPU type 选择 CPU 315T-3 PN/DP。
二、硬件组态
双击打开Hardware(硬件),出现新的界面,在其右侧树形工具栏中搜索“SINAMICS S120”,然后选中S120 CU320-2 DP,将其拖到画面左侧的DP线上。
三、网络组态
1、组态profibus DP 网络,TCPU 与CU320 相连。
在将S120 CU320-2 DP 拖到DP 线上后,按照提示操作即可。
注意一下几点:1)、Address(地址)选择4;2)、Version(版本)选择4.3.1;3)、Configration 界面,选择SENMENS telegram 105,PAD-10/10。
2、以太网组态,TCPU 与电脑相连
双击画面中导轨上的PN-IO,在弹出的画面中配置IP 地址。该处配置与SIMOTION 设备基本一致。
四、激活路由:与SIMOTION设备基本一致。
B.S120 驱动系统组态
一、自动组态
与SIMOTION设备基本一致。
二、手动组态
1)servo_02 手动配置:与SIMOTION设备基本一致。
2)servo_03 手动配置:与servo_02 手动配置一致。
3)报文设置:S120_CU320_2_DP>>Communication>>Telegram configuration。
将右侧的SERVO_02 和SERVO_03 的“Telegram type(报文类型)”改为SEMENS telegram105,PZD 10/10。再点击最右侧的“Set up address(设置地址)”,以保证PLC 和S120 两端的报文类型保持一致。
先返回到SIMANICS Manenger 的Hardware 界面重新将硬件组态下载到TCPU 中,然后再回到S7 Config 界面,点击在线再把此项目下载到CU320 中。
三、控制面板测试驱动器:与SIMOTION设备基本一致。
实验二:回零
实验目的
1、了解编码器的区别
2、掌握基本的回零概念和方式
实验设备
编程电脑一台、SIMOTION D425 设备一套
实验内容
1、默认回零方式
通过编码器零脉冲回零,当没有零点开关时,可以先手动将轴移动到机械零点位置附近。回零命令使轴反向运行(Reduced velocity)至编码器的零脉冲标记处。检测到编码器零脉冲后,轴正向运行以进入速度(Entry velocity)运行至零点偏移位置后将此位置设置为零点坐标。
2、主动回零(Active homing):仅通过编码器零脉冲回零(encoder zero marker only),无零点开关。
回零命令使轴运行(Reduced velocity)至编码器的零脉冲标记处。检测到编码器零脉冲后,轴以进入速度(Entry velocity)运行至零点偏移位置后将此位置设置为零点坐标。
3、直接回零/设置零点位置(Direct homing/setting the home position)
将轴的当前位置设置为指定的轴的零点位置坐标。当执行回零命令后,发出已回零的状态信号。轴回零的参数设置对于此种回零方式无用。
4、相对直接回零/零点位置的相对设置(Relative direct homing/relative setting of homeposition)
执行相对直接回零指令后,会在轴当前位置上偏移零点位置的设定值。当轴运行中也可以使用此种回零方式。轴回零的参数设置对于此种回零方式无用。轴的零点坐标在回零命令中设置。
5、绝对值编码器回零/绝对值编码器校准(Absolute encoder homing/absolute encoderadjustment)
编码器的偏移量分为相对偏移和绝对偏移两种:
(1) 绝对值编码器相对偏移回零
轴的实际值= 编码器实际值+以前设置的有效偏移量+abs encoder offset 采用相对偏移量做回零操作,每执行一次回零指令,轴在之前偏移值基础上增加abs encoder offset。
(2) 绝对值编码器绝对偏移回零
轴的实际值= 编码器实际值+ abs encoder offset
采用绝对偏移量做回零操作,每执行一次回零指令,轴的偏移值都为设置的
absencoder offset 。
以下是实验中使用默认回零方式得到的图像:
实验三:同步
实验目的:
1、了解同步的概念
2、学会使用电子齿轮同步
3、学会MCC 编程控制S120 进行同步操作
实验设备:
编程电脑一台、SIMOTION D425 一套
实验内容
一、同步配置过程:
1、在离线模式下插入主轴Axis_1 轴,选择为位置轴,即图中勾选Speed control 和Possitioning
2、配置同步关系
二、同步操作编程
以下是实验中得到的图像:1、同步默认值配置
2、同步轮廓:Time由动态响应决定同步过程——立即同步图像
齿轮比2:3,其余参数默认
3、同步轮廓:Time由动态响应决定同步过程
参数设置:同步长度统一500mm,开始位置100mm,偏差100mm,延时2s,其余参数默认
1)立即同步
2)立即同步带偏差
3)根据从轴位置同步(两轴设定的速度相同,为了使同步效果明显,从轴在主轴运行2s后开始运行)
4)根据主轴位置同步
5)根据主轴位置带偏差
6)解同步过程
实验四:设计实验
实验目的
1.熟悉伺服控制器的常用指令
2.能够使用伺服控制器解决具体实际的问题
实验设备
编程电脑一台、SIMTION D 一套
实验原理
平面XY 坐标系定位,在堆垛领域有大量的应用。
设计要求:
一.上电后,Y 轴电机执行回零命令,运行到最上方找到零点;X 轴电机执行回零命令,运行到最左侧找到零点。
二.X 轴电机正转去左位置处,Y 轴电机正转去上位置处
三.X 轴电机到达左位置处,Y 轴电机到达上位置处
四.Y 轴电机正转往下运行,去下位置处取料。到达取料处后取料,然后Y 轴电机反转,到达上位置处
五.Y 轴电机到达上位置处后,X 轴电机正转向右位置处运行;X 轴电机到达右位置处后,Y 轴电机正转向下位置处运行卸料
六.Y 轴电机到达下位置处后,卸料。卸料完成后,Y 轴电机反转向上运行。
七.Y 轴电机到达上位置处后,X 轴电机反转向左位置处运行。返回三。
这样就可在三~七之间循环运行,完成取料、卸料的操作。
MCC编程:1轴代表X轴,2轴代表Y轴
实验过程中得到的图像:1)X轴位置曲线
2)Y轴位置曲线
3)XY轴位置曲线
实验五:设计二
题目如下:
触摸屏实现下图所示的运动轨迹。要求:手动实现A->B->C->D->A运动轨迹,两点之间的距离可在触摸屏上设置,并显示当前所处点位置和运行状态。
一、实验过程可视化
步骤一:新建项目,添加HMI设备(TP700)
选择“组态HMI画面”,添加SIMATIC 精智面板7#显示屏TP700,点击“确定”完成设备的添加
步骤二:添加画面,建立连接
1.双击“画面_1”,进入画面编辑器,在左侧窗口,双击“连接”,如图所示。
2.编辑连接的名称,选择通信驱动程序“SIMATIC S7 300/400”,设定接口参
数选择以太网(ETHERNET),编辑HMI设备地址(要求与PLC地址在同一网段)以及PLC地址(与编写PLC程序软件中设置的地址一致)。
步骤三:建立变量
如图所示,展开“HMI变量”选项,双击“显示所有变量”,添加外部变量,定义变量名称、数据类型、连接、地址(与PLC程序中的地址一一对应)等。
步骤四:组态画面
1.双击“画面_1”,进入画面编辑器,右侧有相应的工具箱,如图所示。
2.按钮控件的组态:从右侧工具箱中拖入按钮控件,选中按钮控件,右击选择“属性”,
在属性项编辑其文本与外观,在事件“按下”选择项,添加函数,如图所示。
直流伺服电机实验报告
实验六 直流伺服电机实验 一、实验设备及仪器 被测电机铭牌参数: P N =185W ,U N =220V ,I N =1.1A , 使用设备规格(编号): 1.MEL 系列电机系统教学实验台主控制屏(MEL-I 、MEL-IIA 、B ); 2.电机导轨及测功机、转速转矩测量(MEL-13); 3.直流并励电动机M03(作直流伺服电机); 4.220V 直流可调稳压电源(位于实验台主控制屏的下部); 5.三相可调电阻900Ω(MEL-03); 6.三相可调电阻90Ω(MEL-04); 7.直流电压、毫安、安培表(MEL-06); 二、实验目的 1.通过实验测出直流伺服电动机的参数r a 、e κ、T κ。 2.掌握直流伺服电动机的机械特性和调节特性的测量方法。 三、实验项目 1.用伏安法测出直流伺服电动机的电枢绕组电阻r a 。
2.保持U f=U fN=220V,分别测取U a =220V及U a=110V的机械特性n=f(T)。3.保持U f=U fN=220V,分别测取T2=0.8N.m及T2=0的调节特性n=f(Ua)。4.测直流伺服电动机的机电时间常数。 四、实验说明及操作步骤 1.用伏安法测电枢的直流电阻Ra
表中Ra=(R a1+R a2+R a3)/3; R aref=Ra*a ref θ θ + + 235 235 (3)计算基准工作温度时的电枢电阻 由实验测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温。按下式换算到基准工作温度时的电枢绕组电阻值: R aref=Ra a ref θ θ + + 235 235
控制测量实验报告
控制测量实习报告 姓名:邸凯 院系:资源工程学院 专业:测绘工程一班 学号:2011092549 实习地点:厦门海沧区 指导教师:高鹏 2014年12月
控制测量实习报告 2011092549 11资源测绘(1)班邸凯 一.实习单位:福建省地质测绘院厦门分院 二.实习项目:中共厦门市委党校迁建工程 三.项目概况:本项目位于厦门市海沧区天竺山西路,起算控制点引用厦门市测绘与基础地理信息中心提供的2006年布设的I级导线点,经检测其精度满足规范要求,可作为本项目起算控制点;坐标系为92厦门坐标系,高程系为1985国家高程基准。 四.实习时间:2014年12月 五.实习地点:厦门市海沧区天竺山西路71号 六.小组成员:苏景坤周三平廖旭辉邸凯王志斌七.技术指导:苏景坤 八.实习目的: 1.通过实习,熟悉并掌握控制网的布设方法及三、四等控制测量的作业程序及施测方法。 2.对野外观测成果的整理、检查和计算。掌握用测量平差理论处理控制测量成果的基本技能。 九.实习设备: 全站型电子速测仪,DS3型微倾式水准仪,塔尺,三脚架,盘尺,半圆仪,测钎,直尺等。
十.实习内容: 1. 平面控制网的建立。 2. 高程控制网的建立。 3. 控制网平差与精度计算。 十一.实习步骤: 1.高程控制网 1.1布设 1.1.1根据提供的高级控制点资料,到测区实地现场勘察。了解高级控制点标志的完好情况,核对地形图的准确性,初步考虑导线的布设形式。 1.1.2在本测区范围内,综合考虑测区内高级控制点的数量、分布及地形条件等情况,根据技术要求,确定导线布设形式及点的位置,用铅笔标于图上并编号。绘制出注有高级控制点和导线点点位的导线设计略图. 1.2四等水准测量: 1.1使用DS3水准仪水准测量: 1.1.1观测 (1)根据设计好的导线路线,结合实地情况布设水准路线,采用四等水准测量观测程序进行,使用双面尺法观测。 (2)在进行观测时,将仪器大致架设在两尺的中点处,每次中丝读数之前,按一下水准仪上的自动安平按钮,读出中丝和视距丝(上丝、下丝)读数。
工程测量实验报告
实验报告 课程名称:工程测量实验报告 专业班级:D测绘131 姓名学号:戴峻2013132911 测绘工程学院 实验报告一、精密角度测量 一、实验名称:精密角度测量 二、实验性质:综合性实验 三、实验地点:淮海工学院苍梧校区 时间:2016.6.02 四、实验目的: 1. 掌握精密经纬仪(DJ1或DJ2)的操作方法。 2. 掌握方向法观测水平角水平角的观测顺序,记录和计算方法。 五、仪器和工具: 全站仪一台,三脚架一个,记录板一块,自备铅笔,记录手薄和观测目标物。
六、实验内容及设计: 在实验之前,需要做的工作是:了解实验内容,以及读数的多种限差,并选择好实验地点,大略知道实验数据的处理。 1.实验步骤: (1)架设全站仪,完成对中、整平; (2)调清楚十字丝,选择好起始方向,消除视差; (3)一个测站上四个目标一测回的观测程序 2. 度盘配置: 设共测4个测回,则第i个测回的度盘位置略大于(i-1)180/4. 3. 一测回观测: (1) 盘左。选定一距离较远、目标明显的点(如A点)作为起始方向,将平读盘读数配置在稍大于0 o处,读取此时的读数;松开水平制动螺旋,顺时针方向依次照准B、C、D三目标读数;最后再次瞄准起始点A并读数,称为归零。
以上称为上半侧回。两次瞄准A点的读数之差称为“归零差”,检核是否超限,超限及时放弃本测回,重新开始本测回。 (2)盘右。先瞄准起始目标A,进行读数;然后按逆时针放线依次照准D、C、B、A各目标,并读数。 以上称之为下半测回,其归零差仍要满足规范要求。 上、下半测回构成了一个测回,检核本测回是否满足各项限差,如超限,重新开始本测回,合限,进行下一测回工作。 4.记录、计算 (1)记录。参考本指南所附的本次实验记录表格。盘左各目标的读数按从上往下的顺序记录,盘右各目标读数按从下往上的顺序记录。 (2)两倍照准误差2C的计算。按照下式计算2C 对于同一台仪器,在同一测回内,各方向的2C值应为一个定值。若有变化,其变化值不超过表1.1中规定的范围 表1.1 水平角方向观测法的技术要求
测量学实验报告_1
测量学实验报告 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 一、实验目的;由于测量学是一门实践性很强的学科,而测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高.
测量实习是测量学理论教学和实验教学之后的一门独立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问题和解决问题的能力,训练严谨的科学态度和工作作风。 二、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程起始点,记为a,选择有一定长度、一定高差的路线作为施测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立
尺点(转点1)作为前视点,在转点1处放置尺垫,立尺(前视尺)。将水准仪安置在前后视距大致相等的位置(常用步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记录 2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记入高差栏中。然后将仪器迁至第二站,第一站的前视尺不动变为第二站的后视尺,第一站的后视尺移到转点2上,变为第二站的前视尺,按与第一站相同的方法进行观测、记录、计算。按以上程序依选定的水准路线方向继续施测,直至回到起始水准点bm1为止,完成最后一个测站的观测记录。 3)成果检核。计算闭合水准路线的高差闭合差;若高差闭合差超限,应先进行计算校核,若非计算问题,则应进行返工重测。 实习过程中控制点的选取很重要,控制点应选在土质坚实、便于保存和安置水准仪的地方,相邻导线点间应通视良好,便于测角量距,边长约60米至100米左右。我觉得我们组测量时就有一个点的通视不是很好,有树叶遮挡,但是那也没办法,因为那个地方的环境所致,幸好我们可以解决.还
工程测量学课间实验报告数据版
实习四 全站仪三维坐标放样 一、实习目的及要求 1.熟悉全站仪的基本操作。 2.掌握极坐标法测设点平面位置的方法。 3.要求每组用极坐标法放样至少4个点。 二、仪器设备与工具 每组全站仪1台、棱镜2个、对中杆1个、钢卷尺1把、记录板1个。 三、实习方法与步骤 1.测设元素计算: 如图4-1所示,A 、B 为地面控制点,现欲测设房角点P ,则首先根据下面的公式计算测设数据: (1) 计算AB 、 AP 边的坐标方位角: (2) 计算AP 与AB 之间的夹角: (3) 计算A 、P 两点间的水平距离: 注:以上计算可由全站仪内置程序自动进行。 2.实地测设: (1)仪器安置:在A (2)定向:在B 点安置棱镜,用全站仪照准B 点棱镜,拧紧水平制动和竖直制动。 (3)数据输入:把控制点A 、B 和待测点P 的坐标分别输入全站仪。全站仪便可根据 内置程序计算出测设数据D 及β,并显示在屏幕上。 (4)测设:把仪器的水平度盘读数拨转至已知方向β上,拿棱镜的同学在已知方向 线上在待定点P 的大概位置立好棱镜,观测仪器的同学立刻便可测出目前点位与正确点位的偏差值△D 及 △β(仪器自动显示),然后根据其大小指挥拿棱镜的同学调整其位置,直至观测的结果恰好等于计算得到 的D 和β,或者当△D 及△β为一微小量(在规定的误差范围内)时方可。 四、注意事项 1.不同厂家生产的全站仪在数据输入、测设过程中的某些操作可能会稍不一样,实际工作中应仔细 AB AB AB x y ??=arctan αAP AP AP x y ??=arctan αAB αβ=22)()(A P A P AP y y x x D =-+-=
测量学实验报告.
测量学实验报告 2018-09-06 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 一、实验目的;由于测量学是一门实践性很强的学科,而测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高. 测量实习是测量学理论教学和实验教学之后的一门独立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问题和解决问题的能力,训练严谨的科学态度和工作作风。 二、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程起始点,记为a,选择有一定长度、一定高差的路线作为施测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立尺点(转点1)作为前视点,在转点1处放置尺垫,立尺(前视尺)。将水准仪安置在前后视距大致相等的位置(常用步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记录 2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记入高差栏中。然后将仪器迁至第二站,第一站的前视尺不动变为第二站的后视尺,第一站的后视尺移到转点2上,变为第二站的前视尺,按与第一站相同的方法进行观测、记录、计算。按以上程序依选定的水准路线方向继续施测,直至回到起始水准点bm1为止,完成最后一个测站的观测记录。
直流伺服电机实验报告
直流电机的特性测试 一、实验要求 在实验台上测试直流电机机械特性、工作特性、调速特性(空载)和动态特性,其中测试机械特性时分别测试电压、电流、转速和扭矩四个参数,根据测试结果拟合转速—转矩特性(机械特性),并以X 轴为电流,拟合电流—电压特性、电流—转速特性、电流—转矩特性,绘制电机输入功率、输出功率和效率曲线,即绘制电机综合特性曲线。然后在空载情况下测试电机的调速特性,即最低稳定转速和额定电压下的最高转速,即调速特性;最后测试不同负载和不同转速阶跃下电机的动态特性。 二、实验原理 1、直流电机的机械特性 直流电机在稳态运行下,有下列方程式: 电枢电动势 e E C n =Φ (1-1) 电磁转矩 e m T C I =Φ (1-2) 电压平衡方程 U E I R =+ (1-3) 联立求解上述方程式,可以得到以下方程: 2e e e m U R n T C C C = -ΦΦ (1-4) 式中 R ——电枢回路总电阻 Φ——励磁磁通 e C ——电动势常数 m C ——转矩常数 U ——电枢电压 e T ——电磁转矩 n ——电机转速
在式(1-4)中,当输入电枢电压U 保持不变时,电机的转速n 随电磁转矩e T 变化而变化的规律,称为直流电机的机械特性。 2、直流电机的工作特性 因为直流电机的励磁恒定,由式(1-2)知,电枢电流正比于电磁转矩。另外,将式(1-2)代入式(1-4)后得到以下方程: e e U R n I C C = -ΦΦ (1-5) 由上式知,当输入电枢电压一定时,转速是随电枢电流的变化而线性变化的。 3、直流电机的调速特性 直流电机的调速方法有三种:调节电枢电压、调节励磁磁通和改变电枢附加 电阻。 本实验采取调节电枢电压的方法来实现直流电机的调速。当电磁转矩一定 时,电机的稳态转速会随电枢电压的变化而线性变化,如式(1-4)中所示。 4、直流电机的动态特性 直流电机的启动存在一个过渡过程,在此过程中,电机的转速、电流及转矩 等物理量随时间变化的规律,叫做直流电机的动态特性。本实验主要测量的是转速随时间的变化规律,如下式所示: s m dn n n T dt =- (1-6) 其中,s n ——稳态转速 m T ——机械时间常数 本实验中,要求测试在不同负载和不同输入电枢电压(阶跃信号)下电机的 动态特性。 5、传感器类型 本实验中,测量电机转速使用的是角位移传感器中的光电编码器;测量电磁 转矩使用的是扭矩传感器。
平面控制测量实验报告样本(通用版)
平面控制测量实验报告样本(通用版) Sample of plane control survey experiment report (general ver sion) 汇报人:JinTai College
平面控制测量实验报告样本(通用版) 前言:报告是按照上级部署或工作计划,每完成一项任务,一般都要向上级写报告,反映工作中的基本情况、工作中取得的经验教训、存在的问题以及今后工作设想等,以取得上级领导部门的指导。本文档根据申请报告内容要求展开说明,具有实践指导意义,便于学习和使用,本文档下载后内容可按需编辑修改及打印。 一、前言 1、课程设计实验目的 (1)初步学会根据测区情况,确定导线形式及选择数量合理的图根点,掌握图根控制测量的外业和内业工作。 (2)掌握坐标格网的绘制和图根点的展会及地形测量方法,学会地形图的整饰和清绘。 2、实验设计任务及要求 每组完成指导教师指定测区范围的1:500比例尺地形图,包括图根控制测量的外业和内业、坐标格网的绘制、图根点的展绘、碎部测量、地形图的整饰和清绘等。 3、实验仪器及工具
全站仪一台,百米绳,塔尺一根,三脚架一个,菱境一个,油漆适量、木桩若干,记录表若干、记录板一块《城市测量规范》一本。 自备:计算器、铅笔、小刀、橡皮、毛笔、大头针、小钉、小夹子若干个、绘图纸、水笔等。 二、课程设计要求 (1)图根控制点的要求 平面控制测量每一个小组在测区范围内选定6~8个控制点,按图根导线的精度要求进行施测。图根导线的技术要求如下表: 图根导线的技术指标 高程控制测量用普通水准测量方法测定各图根点的高程,根据已知高程点(水准点)及地形条件拟定出所采用的水准路线,高差闭合差应不超过±12n 毫米。 (2)碎部测量 施测碎部点可采用极坐标法,支距法或方向交会法,在街坊内部设站困难时,也可采用几何作图等综合方法进行。地物点、地形点视距和测距最大长度应符合下表的规定
工程测量学课间实验报告数据版(DOC)
实习四全站仪三维坐标放样 一、 实习目的及要求 1.熟悉全站仪的基本操作。 2 ?掌握极坐标法测设点平面位置的方法。 3?要求每组用极坐标法放样至少 4个点。 二、 仪器设备与工具 每组全站仪1台、棱镜2个、对中杆1个、钢卷尺1把、记录板1个。 三、 实习方法与步骤 1?测设元素计算: 如图4-1所示,A 、B 为地面控制点,现欲测设房角点 :AB =arcta ' :X AB nA* 图4-1极坐标测设原理
P,则首先根据下面的公式计算测设数据: (1)计算AB、AP边的坐标方位角: :A p =arcta ~X AP (2)计算AP与AB之间的夹角:[八AB—〉AP (3)计算A、P两点间的水平距离: ------------------------------------------------------------------------------------------------------------------------------------------- I D AP= £(Xp 一X A)2(yp 一yA)2二:X AP2?F AP2 注:以上计算可由全站仪内置程序自动进行。 2 .实地测设: (1)仪器安置:在A点安置全站仪,对中、整平。 (2)定向:在B点安置棱镜,用全站仪照准B点棱镜,拧紧水平制动和竖直制动。 (3)数据输入:把控制点A、B和待测点P的坐标分别输入全站仪。全站仪便可根据内置程序计算出测设数据D及B,并显示在屏幕上。 (4)测设:把仪器的水平度盘读数拨转至已知方向B上,拿棱镜的同学在已知方向 线上在待定点P的大概位置立好棱镜,观测仪器的同学立刻便可测出目前点位与正确点位的偏差值△D及△B (仪器自动显示),然后根据其大小指挥拿棱镜的同学调整其位置,直至观测的结果恰好等于计算得到的D和B,或者当△D及为一微小量(在规定的误差范围内)时方可。 四、注意事项 1?不同厂家生产的全站仪在数据输入、测设过程中的某些操作可能会稍不一样,实际工作中应仔细 阅读说明书。 2 ?在实习过程中,测设点的位置是有粗到细的过程,要求同学在实习过程中应有耐心,相互配合。 3 ?测设出待定点后,应用坐标测量法测出该点坐标与设计坐标进行检核。 4 ?实习过程中应注意保护仪器和棱镜的安全,观测的同学不应擅自离开仪器。 全站仪三维坐标放样记录表 日期:____ 年—月—日天气:____________ 仪器型号:_______________ 组号:_________ 观测者: _______________ 记录者:________________ 立棱镜者: _______________________ 已知:测站点A的三维坐标X= 100 m,Y 100 m,H= __________________________ m。 定向点 B 的三维坐标X= 50 m,Y= 135 m,H= __________________________ m。 量得:测站仪器高= _________ m,前视点_______ 的棱镜高= ___________ m。
基本测量实验报告
基本测量(实验报告格式)、实验项目名称实验一:长度和圆柱体体积的测量实验二:密度的测量 二、实验目的实 验一目的: 1、掌握游标的原理,学会正确使用游标卡尺。 2、了解螺旋测微器的结构和原理,学会正确使用螺旋测微器。 3 、掌握不确定度和有效数字的概念,正确表达测量结果。 实验二目的: 1、掌握物理天平的正确使用方法。 2、用流体静力称量法测定形状不规则的固体的密度。 3、掌握游标卡尺,螺旋测位器,物理天平的测量原理及正确使用方法 4、掌握不确定度和有效数字的概念,正确表达测量结果 5、学会直接测量量和间接测量量的不确定度的计算,正 确表达测量结果 三、实验原理 实验一原理:
1、游标卡尺的使用原理 游标副尺上有n个分格,它和主尺上的(n-1)格分格的总长度相等,一般主尺上每一分格的长度为1mm,设游标上每一个分格的长度为x,则有nx=n-1,主尺上每一分格与游标上每一分格的差值为1-x= (mm)是游标卡尺的最小读数,即游 标卡尺的分度值。若游标上有20个分格,则该游标卡尺的 分度值为=0.05mm,这种游标卡尺称为20分游标卡尺;若游标上有50个分格,其分度值为=0.02mm,称这种游标卡尺为50分游标卡尺。 2、螺旋测微器的读数原理: 螺旋测微器是依据螺旋放大的原理制成的,即螺杆在螺母中旋转一周,螺杆便沿着旋转轴线方向前进或后退一个螺距的距离。因此,沿轴线方向移动的微小距离,就能用圆周上的读数表示出来。 3、当待测物体是一直径为d、高度为h的圆柱体时, V =兀* * h 物体的体积为:一4 d2只要用游标卡尺测出高度 h,用螺旋测微器测出直径d,代 入上式即可
直流伺服电动机实验报告1
淄博职业技术学院控制电机实验报告XX学院___年级 XX班姓名________学号_________同组人__________ 实验日期________年_____月____日温度________ 湿度________ 实验一直流伺服电动机电枢电阻的测量 一、实验目的 1、通过实验测出直流伺服电动机的参数ra、Ke、KT。 2、掌握直流伺服电动机的机械特性 二、实验项目 1、测直流伺服电动机的电枢电阻。 三、实验方法 1、实验设备: 2、用伏安法测直流伺服电动机电枢的直流电阻 (1)用伏安法测直流伺服电动机电枢的直流电阻
按图1接线,电阻选用2.2K 100W 的变阻器。电流表的量程选用2A ,电源选用直流电机专用电源上的电枢电源。 图.1 测电枢绕组直流电阻接线图 (2) 经检查无误后接通电枢电源,并调至220V ,合上开关S ,调节R 使电枢电流达到0.2A ,迅速测取电机电枢两端电压U 和电流I ,再将电机轴分别旋转三分之一周和三分之二周。同样测取U 、I ,记录于表1-1中,取三次的平均值作为实际冷态电阻。 (3) 计算基准工作温度时的电枢电阻 由实验直接测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温,按下式换算到基准工作温度时的电枢绕组电阻值。 a ref a aref R R θθ++=235235
式中: Raref ——换算到基准工作温度时电枢绕组电阻,(Ω) Ra ——电枢绕组的实际冷态电阻,(Ω) θref——基准工作温度,对于E 级绝缘为75℃ θa——实际冷态时电枢绕组温度,(℃) 四、实验报告 1、由实验数据求得电机参数:R aref 、K e 、K T R aref ——直流伺服电动机的电枢电阻 ——电势常数 ——转矩常数 五、实验心得 通过本次试验加深了对直流伺服电动机的理解, 六、思考题 1、若直流伺服电动机正(反)转速有差别,试分析其原因? (1)“零飘”,零点不是绝对零点,要调节零飘点,接近于0位置,正反转就基本一致了 (2)因为可控硅制造工艺和参数问题,实际上反转跟正传的电流环并不一致 e T aN e K K n U K π 300 = =
温度测量控制系统的设计与制作实验报告(汇编)
北京电子科技学院 课程设计报告 ( 2010 – 2011年度第一学期) 名称:模拟电子技术课程设计 题目:温度测量控制系统的设计与制作 学号: 学生姓名: 指导教师: 成绩: 日期:2010年11月17日
目录 一、电子技术课程设计的目的与要求 (3) 二、课程设计名称及设计要求 (3) 三、总体设计思想 (3) 四、系统框图及简要说明 (4) 五、单元电路设计(原理、芯片、参数计算等) (4) 六、总体电路 (5) 七、仿真结果 (8) 八、实测结果分析 (9) 九、心得体会 (9) 附录I:元器件清单 (11) 附录II:multisim仿真图 (11) 附录III:参考文献 (11)
一、电子技术课程设计的目的与要求 (一)电子技术课程设计的目的 课程设计作为模拟电子技术课程的重要组成部分,目的是使学生进一步理解课程内容,基本掌握电子系统设计和调试的方法,增加集成电路应用知识,培养学生实际动手能力以及分析、解决问题的能力。 按照本专业培养方案要求,在学完专业基础课模拟电子技术课程后,应进行课程设计,其目的是使学生更好地巩固和加深对基础知识的理解,学会设计小型电子系统的方法,独立完成系统设计及调试,增强学生理论联系实际的能力,提高学生电路分析和设计能力。通过实践教学引导学生在理论指导下有所创新,为专业课的学习和日后工程实践奠定基础。 (二)电子技术课程设计的要求 1.教学基本要求 要求学生独立完成选题设计,掌握数字系统设计方法;完成系统的组装及调试工作;在课程设计中要注重培养工程质量意识,按要求写出课程设计报告。 教师应事先准备好课程设计任务书、指导学生查阅有关资料,安排适当的时间进行答疑,帮助学生解决课程设计过程中的问题。 2.能力培养要求 (1)通过查阅手册和有关文献资料培养学生独立分析和解决实际问题的能力。 (2)通过实际电路方案的分析比较、设计计算、元件选取、安装调试等环节,掌握简单实用电路的分析方法和工程设计方法。 (3)掌握常用仪器设备的使用方法,学会简单的实验调试,提高动手能力。 (4)综合应用课程中学到的理论知识去独立完成一个设计任务。 (5)培养严肃认真的工作作风和严谨的科学态度。 二、课程设计名称及设计要求 (一)课程设计名称 设计题目:温度测量控制系统的设计与制作 (二)课程设计要求 1、设计任务 要求设计制作一个可以测量温度的测量控制系统,测量温度范围:室温0~50℃,测量精度±1℃。 2、技术指标及要求: (1)当温度在室温0℃~50℃之间变化时,系统输出端1相应在0~5V之间变化。 (2)当输出端1电压大于3V时,输出端2为低电平;当输出端1小于2V时,输出端2为高电平。 输出端1电压小于3V并大于2V时,输出端2保持不变。 三、总体设计思想 使用温度传感器完成系统设计中将实现温度信号转化为电压信号这一要求,该器件具有良好的线性和互换性,测量精度高,并具有消除电源波动的特性。因此,我们可以利用它的这些特性,实现从温度到电流的转化;但是,又考虑到温度传感器应用在电路中后,相当于电流源的作用,产生的是电流信号,所以,应用一个接地电阻使电流信号在传输过程中转化为电压信号。接下来应该是对产生电压信号的传输与调整,这里要用到电压跟随器、加减运算电路,这些电路的实现都离不开集成运放对信号进行运算以及电位器对电压调节,所以选用了集成运放LM324和电位器;最后为实现技术指标(当输出端1电压大于3V时,输出端2为低电平;当输出端1小于2V时,输出端2为高电平。输出端1电压小于3V并大于2V时,输出端2保持不变。)中的要求,选用了555定时器LM555CM。 通过以上分析,电路的总体设计思想就明确了,即我们使用温度传感器AD590将温度转化成电压信号,然后通过一系列的集成运放电路,使表示温度的电压放大,从而线性地落在0~5V这个区间里。最后通过一个555设计的电路实现当输出电压在2与3V这两点上实现输出高低电平的变化。
工程测量学课间实验报告数据版
实习四全站仪三维坐标放样 、实习目的及要求 1 .熟悉全站仪的基本操作。 2 ?掌握极坐标法测设点平面位置的方法。 3 ?要求每组用极坐标法放样至少 4个点。 D AP = .(X p -X A )2 (y p - y A )2 二.X AP 2 J AP 2 注:以上计算可由全站仪内置程序自动进行。 2 .实地测设: (1) 仪器安置:在 A 点安置全站仪,对中、整平。 (2) 定向:在B 点安置棱镜,用全站仪照准 B 点棱镜,拧紧水平制动和竖直制动。 (3) 数据输入:把控制点 A 、B 和待测点P 的坐标分别输入全站仪。全站仪便可根据 内置程序计算出测设数据 D 及B,并显示在屏幕上。 (4) 测设:把仪器的水平度盘读数拨转至已知方向 B 上,拿棱镜的同学在已知方向 线上在待定点P 的大概位置立好棱镜,观测仪器的同学立刻便可测出目前点位与正确点位的偏差值 △)及△ 、仪器设备与工具 每组全站仪1台、棱镜2个、对中杆1个、钢卷尺1把、记录板 1个。 三、实习方法与步骤 1 ?测设元素计算: 如图4-1所示,A 、B 为地面控制点,现欲测设房角 点P ,则首先根据下面的公式计算测设数据: 计算AB 、 AP 边的坐标方位角: (1) (2) 计算AP y AB =arcta n — -:X AB y AP 二 arcta n — 「 X AP (3) 计算A 、 P 两点间的水平距离: 图4-1极坐标测设原理
B (仪器自动显示),然后根据其大小指挥拿棱镜的同学调整其位置,直至观测的结果恰好等于计算得到的 D和B,或者当 e 及为一微小量(在规定的误差范围内)时方可。 四、注意事项 1 ?不同厂家生产的全站仪在数据输入、测设过程中的某些操作可能会稍不一样,实际工作中应仔细阅读说明书。 2 ?在实习过程中,测设点的位置是有粗到细的过程,要求同学在实习过程中应有耐心,相互配合。 3 ?测设出待定点后,应用坐标测量法测出该点坐标与设计坐标进行检核。 4 ?实习过程中应注意保护仪器和棱镜的安全,观测的同学不应擅自离开仪器。 全站仪三维坐标放样记录表 日期:___ 年―月—日天气: _____ 仪器型号: ______________ 号:______ —观测者:_____________ 记录者:_________________ 立棱镜者:_____________________ 已知:测站点A的三维坐标X= 100 m , Y= 100 m , H= ___________________________ m。 定向点 B 的三维坐标X= 50 m, Y= 135 m , H= ____________________________ m。 量得:测站仪器高= ___________ m,前视点 _______ 的棱镜高= ___________ m
测量学实验报告
测量学C实验 指导书 班级: 学号: 组别: 姓名:
实验须知 实验是配合课堂教学的一个重要教学环节,同时也是培养学生掌握实验的基本技能和进行基本训练的一个主要手段,为了保证实验的顺利进行,必须注意下列事项: 1、实验之前,希望同学们要预习实验指导书,了解本次实验的目的,原理和要求: 2、严格按操作步骤认真操作,实验报告要客观、详细记录实验步骤,实验成果等。 3、爱护实验仪器,非本次实验用的仪器或虽是本次实验所用的仪器,但在老师没有讲解之前都不得随便乱动,以免损坏仪器; 4、实验中不慎损坏仪器或丢失仪器中的附件,均应主动地告诉老师,按照有关规定处理;
目录 实验一水准仪的使用 (1) 实验二经纬仪的使用 (5) 实验三碎部测量 (12)
实验一水准仪的使用 (1)水准仪的使用 一、目的 1、了解DS3级水准仪的构造及各部分的名称和作用 2、掌握水准仪使用的基本操作 3、练习水准尺读数 二、要求 实验学时安排为2学时,每人安置2~3次水准仪,读尺4~5次。 三、仪器及工具 每组:水准仪一台、水准尺一把、记录板一块。 四、预习内容 水准测量的仪器及工具,水准仪的使用 五、实验步骤 1、安置水准仪:测量仪器所安置的地点称为测站。打开三脚架,使其高度适中,架头大致水平,牢固地架设在地面上。然后打开仪器箱(记清仪器各部件位置,以便装箱时按原来位置放置),双手握基座取出仪器,放在三脚架上,用连接螺旋将水准仪固连在三脚架上。用手推一下仪器,检查仪器是否真正连接牢固。 2、熟悉仪器:认识水准仪构造及各部分的名称、作用。 3、粗略整平: (1)置圆气泡于两脚螺旋之间(或于一脚螺旋上方),转动这两个脚螺旋使圆气泡在这两脚螺旋方向居中(气泡移动方向与左手大姆指旋转方向一致)。 (2)转动第三个脚螺旋使圆气泡居中,反复练习几次。 4、瞄准对光: (1)将望远镜对向明亮的背景(白墙或白纸),转动目镜对光螺旋使十字丝看得非常清晰。 (2)松开制动螺旋,用镜筒上的准星瞄准水准尺(立水准尺在离水准仪约30米处),拧紧制动螺旋。 (3)转动物镜对光螺旋,使水准尺的像十分清晰,然后眼睛在目镜上下作微小移动,观察水准尺与十字丝面是否有相对移动。若有,则存在视差,为此,可反复调节对光螺旋,直到视差消除为止。 (4)旋转微动螺旋,使水准尺的象靠近十字丝的纵丝。
控制测量实验报告
一、实验目的与要求: 掌握水准仪的安置、整平、瞄准与读数和测定地面两点间的高差; 掌握全站仪对中、整平、瞄准与读数等基本操作要领; 掌握小地区碎部测量布点方式; 掌握测绘学的水准测量和导线测量的一般方法; 二、实验任务: 控制点高程测量;导线测量;水准、闭合导线内业计算; 学校莳英园水准闭合路线的测量,并根据其中一个已知高程的水准点推算出其它水准点的高程。每小组完成一个指定区域的导线测量(包括高程)。完成提交一份水准测量的成果表、一份水准测量的原始记录数据的电子表格、一份导线测量的布点图、一份导线测量的原始测量数据的记录表格。 三、实验内容: 1. 对莳英园的18个控制点采用闭合路线进行等外水准测量,并且闭合路线每条线路,及相应的内业处理 2.在莳英园为中心,包括9,10,11,12号楼,北门,西北门,草坪、亭台进碎步点的布设和将布设的碎步点采用导线测量的方式测量其坐标和高程,及相应的内业处理。 四、实验设备:水准仪,水准尺,三脚架,全站仪,棱镜,对中杆,卷尺,图纸等。, 五、技术设计: 1.水准测量:根据已知水准点的高程,测量其他水准点的高程. 使用水准仪和水准尺,在所选择的闭合回路上有若干个控制点(索要测出高程的点)。闭合回路上,每两个控制点之间为一测段,站与站间距离应适中,按照国家水准测量技术要求进行施测。 2.导线测量:通过测角和量距,求出各导线点的坐标 导线从一已知控制点出发,经过17个点,又回到起始点上,形成一闭合多边形,成为闭合导线。由于测量了多边形的各内角及边长,闭合导线也具有检核作用。 a角度检核条件:多边形各内角的观测值之和与其理论值之差,应满足限差要求,其中n为多边形角个数。 b坐标增量检核条件:上述理论值应为零,可实际上一般不等于零,但也应该满足限差要求。 c导线测量的外业工作:踏勘选点及建立标志,测角,量边等。 d导线测量内业计算:导线测量内业计算的目的就是计算各导线点的平面坐标x、y。计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错算错,成果是否符合精度要求,计算数据是否准确 3. 碎步测量:根据控制点,测定碎部点的平面位置和高程; 4. 绘图。
流量测量实验报告
课程实验报告 学年学期 2012—2013学年第二学期课程名称工程水文学 实验名称河道测深测速实验 实验室北校区灌溉实验站 专业年级热动113 学生姓名白治朋 学生学号 2011012106 任课教师向友珍李志军 水利与建筑工程学院
1 实验目的 (1)了解流速仪的主要构造及其作用、仪器的性能。 (2)掌握流速仪的装配步骤与保养方法。 (3)了解流速仪测流的基本方法。 2 实验内容 LS25-3C型旋浆流速仪是一种新改型仪器,采用磁电转换原理,无触点式测量,信号采集数多,灵敏度高,防水,防沙性能好,仪器结构紧凑,是一种大量程的流速仪。适用于一般河流,水库、湖泊、河口、水电站、溢港道等高、中、低流速测量。配用HR型流速测算仪。 2.1 主要技术指标 (1)测速范围: V=0.04-10 m/s (2)仪器的起转速: Vo≤0.035 m/s (3)临界速度: Vk≤0.12m/s (4)每转四个信号 (5)旋浆水力螺距: K=250mm(理论) (6)检定公式全线均方差:M≤1.5% (7)信号接收处理:HR型流速仪测算仪(适应线性关系) (8)测流历时: 20s、50s、l00s或1~999s任意设置 (9)测量数位:四位有效数 (10)显示查询方式:显示内容有时间、K值、C值、历时T、流速V、信号数等。 (11)参数设置及保存:可调校时间及设置K、C、T值等参数,设置后参数在掉电状态能长期 2.2仪器结构 本仪器按工作原理可分为:感应,传信,测算,尾翼部份。仪器测流时的安装方式有悬杆,转轴和测杆等几种。 (1)感应部份为一个双叶螺旋浆,安装于支承系统上灵敏地感应水流速度的变化。旋浆的转速与水流速度之间的函数关系由流速仪检定水槽实验得出。 (2)传信部份由磁钢,接收电子器件一霍尔传感器构成,浆叶旋转带动磁钢转动。 (3)HR型流速测算仪控制板由89CXX系列单片机及有关电路组成,液晶显示采用的是二线式串行
交流伺服电机试验报告
实验五交流伺服电机实验一、实验设备及仪器 被测电机铭牌参数: P N=25W, U N=220V, I N=0.55A,μN=2700rpm 使用设备规格(编号): 1.MEL系列电机系统教学实验台主控制屏(MEL-I、MEL-IIA、B);2.电机导轨及测功机、转速转矩测量(MEL-13); 3.交流伺服电动机M13; 4.三相可调电阻90Ω(MEL-04); 5.三相可调电阻900Ω(MEL-03); 6.隔离变压器和三相调压器(试验台右下角) 二.实验目的 1.掌握用实验方法配圆磁场。 2.掌握交流伺服电动机机械特性及调节特性的测量方法。
三.实验项目 1.观察伺服电动机有无“自转”现象。 2.测定交流伺服电动机采用幅值控制时的机械特性和调节特性。 三相调压器输出的线电压U uw经过开关S(MEL—05)接交流伺服电机的控制绕组。 G为测功机,通过航空插座与MEL—13相连。 1.观察交流伺服电动机有无“自转”现象 测功机和交流伺服电机暂不联接(联轴器脱开),调压器旋钮逆时针调到底,使输出位于最小位置。合上开关S。 接通交流电源,调节三相调压器,使输出电压增加,此时电机应启动运转,继续升高电压直到控制绕组U c=127V。 待电机空载运行稳定后,打开开关S,观察电机有无“自转”现象。 将控制电压相位改变180°电角度,观察电动机转向有无改变。 没有自转现象。 2.测定交流伺服电动机采用幅值控制时的机械特性和调节特性 (1)测定交流伺服电动机a=1(即U c=U N=220V)时的机械特性 把测功机和交流伺服电动机同轴联接,调节三相调压器,使U c=U cn=220V,保持U f、U c电
摄影测量学实验报告
课间实验报告 2010年——2011年第 2学期 实验课程:摄影测量学 实验班级:08级地理信息系统 学生: 学号: 指导教师: 重庆交通大学测量与空间数据处理实验室
目录 实验一:单像空间后方交会算法实现 实验二:人眼立体相对观察
实验一:单像空间后方交会算法实现 一、 实验目的 通过用程序设计语言(Visual C++或者C 语言、C# 、VB 语言)编写一个完整的单片空间后方交会程序,通过对提供的一定数量的地面控制点进行计算,运用共线方程式反求输出像片的外方位元素并评定精度。本实验的目的在于让学生深入理解单片空间后方交会的原理、方法,体会在有多余观测情况下,用最小二乘平差方法实现解求影像外方位元素的过程。通过上机调试程序加强动手能力的培养,通过对实验结果的分析,增强学生综合运用所学知识解决实际问题的能力。 二、 实验器材 1. 航片坐标量测数据,控制点成果表,航片摄影参数等: ①已知航摄仪内方位元素:f=153.24㎜,000x y ==,摄影比例尺:1/50000 ②已知4对控制点的影像坐标和地面坐标 ③要求写出详细的解答过程 三、 实验原理 以单幅航空影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的 像坐标量测值出发,根据共线条件方程,求解该影像在航空摄影时刻的外方位元素 。由于空间后方交会所采用的数学模型共线方程是非线性函数,为了方便外方位元素的求解,需要首先对共线方程进行线性化。 四、 实验步骤 运用程序设计语言编写计算过程代码,其代码编写原理为: 1. 运用空间后方交会的基本公式: 2. 误差方程式和法方程式的建立:
测量学实验报告范本
测量学实验报告 Record the situati on and less ons lear ned, find out the exist ing p roblems and form future coun termeasures. 名: 位: 间:
编号:FS-DY-20114 测量学实验报告 i说明:本报告资料适用于记录基本情况、过程中取得的经验教训、发现存在的问题 I I i以及形成今后的应对措施。文档可直接下载或修改,使用时请详细阅读内容。 I ! ____________________________________________________________________________ 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空 间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 、实验目的;由于测量学是一门实践性很强的学科,而 测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高.
测量实习是测量学理论教学和实验教学之后的一门独 立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解 和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、 测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问 题和解决问题的能力,训练严谨的科学态度和工作作风。 、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程 起始点,记为a,选择有一定长度、一定高差的路线作为施 测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立尺点(转点1)作为前视点,在转点1处放置尺垫,立尺 (前视尺)。将水准仪安置在前后视距大致相等的位置(常用 步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记