基于单片机控制的步进电机调速系统的设计 开题报告
三江学院毕业设计(论文)开题报告
注:理工类学生偏重于对课题相关知识的理解和实施方案的框架结构,文管类学生偏重于对文献资料的理解与综述。表格栏高不够可自行增加。
单片机控制步进电机和数码管显示
一、设计任务书 设计内容:用80C51单片机设计一个步进电机控制器 设计要求: 1.用8015设计一个四相步进电机。 2.可控制步进电机的启动与停止,正转与反转。 3.10档速度调节。 4.点动控制。 5.可显示电机运行参数。 二、设计总体方案 (一)控制方式的选择 控制主要用于电机速度和方向的转换。控制方式有按键控制和开关控制两种。按键较开关而言,操作更加简便,故选按键控制。 方案一:独立按键。独立按键可自由连接,线路简单。 方案二:编码式键盘。编码式键盘的按键接触点接于74LS148芯片。当键盘上没有闭合时,所有按键都断开,当某一键闭合时,该键对应的编码由74LS148输出。 本次设计所需按键不多,不需要采用复杂编码,考虑硬件条件、线路连接和经济性等方面,选择方案一。 (二)电机电路设计方案的选择 由于条件的限制,对于电机的选择只能是实验台上最小步距角18°的电机,其中已包含了驱动电路。 (三)单片机的选择 方案一:AT89C51高性能8位单片机,内部集成CPU、存储器、寄存器、I/O接口,从而构成较为完整的计算机,价格便宜。 方案二:C8051F005单片机,该单片机是完全集成的混合信号系统及芯片,具有8051兼容的微控制器内核,与MCS-51指令集完全兼容。除了具有标准8052的数字外设部件,片内还继承了数据采集和控制系统中常用的模拟部件和其他数字外设及功能部件,执行速度快,但价格较贵。 本次课程设计是在仿真环境下进行,没有太过考虑单片机选择的问题,但就设计本身来讲,从物美价廉的角度考虑,选择方案一较合适。 (四)显示方案的选择 方案一:采用LED数码管。LED数码管是轮流现实的,其利用人烟的视觉暂留特性,使人感觉不到数码管闪动,看到每只数码管都常亮。利用其显示必须不停给数码管数据输入口循环赋值,显示内容较多,编程和接线较为复杂。 方案二:采用LCD1602液晶显示器。LCD1602具有功率小,效果明显,变成容易等优点,且它最多能显示2×16个字符,可以轻松满足设计要求。 由上可知,LCD1602液晶显示器的优点突出,故选择方案二。 (五)软件部分的选择 软件部分的选择主要是指编程语言的选择,编译调试工具根据设计平台选择伟福软件。编程语言主要有以下两种方案。
关于matlab的直流电机调速系统仿真设计开题报告
重庆理工大学 毕业设计(论文)开题报告 题目直流电机调速系统仿真设计 1、本课题国内外的研究现状分析 直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础,因此,直流调速系统的应用研究有实际意义。 自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。MATLAB在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
2、本人对课题任务书提出的任务要求及实现目标的可行性分析(只限工科类) 本课题要求完成直流电机双闭环调速系统的工程设计并利用MATLAB实现仿真,通过选择及设计各个模块的系统以及对参数的选择,最终得到预期的仿真结果。 任务要求如下: (1)直流电机调速原理分析 (2)双闭环调速系统特性分析 (3)系统总体方案设计 (4)系统仿真设计 可行性分析: 本课题是针对直流电动机设计的双闭环调速系统,通过MATLAB软件对所设计的系统进行仿真验证。通过学习《电机与拖动》、《电力电子技术》、《电力拖动自动控制系统》等相关课程基本掌握了电机调速的一些知识,并对直流电机调速系统有了一定的了解。同时,通过自学《电机与拖动基础及MATLAB仿真》以及《交直流调速系统与MATLAB仿真》使我对MATLAB软件有了一定的了解,并能通过软件对本课题实现仿真,以上所述便能基本完成本课题的任务要求。
(完整版)基于PLC的步进电机控制系统的设计与实现开题报告zz
1工程概况 步进电机是一种利用脉冲控制,将电脉冲信号转换成相应角位移的电机。而能够产 生相应的脉冲,所以本次设计就是通过PLC产生控制脉冲来控制步进电机的自 动化运行。其系统和驱动电源示意图如下 电流时(对应于时间t o ),利用定时电路或者电流检测反馈等措施使V2基极上信号电 压消失。于是V2截止,而V i仍然导通。因此绕组电流立即转而由低压电源经过二极管 V3供给。低压电源的电压值应使绕组中的电流限制在额定稳态电流 出端信号电压U消失,要求绕组断电时,V1基极上的信号电压也消失了 PLC .脉冲£■配器 电机 图22驱动电源方框图 2设计方案 万案一 步进电机选反应式步进电机,驱动电路选用高低压切换电源高低压切换型电源 的原理线路如图3-2所示。图中当分配器输出端出现控制信U,要求绕组通电时, 三极管V i, V2的基极都有信号输入, 使V i, V2导通,于是,在高压电源的作用下(这 时,二极管V3两端承受的是方向电压, 处于截止状态,可使低电压电源不对绕组作用) 绕组电流迅速上升, 电流迅速上升, 电流前沿很陡。当电流达到或稍微超过额定稳态 I wy值。当分配输 于是V i也截 脉冲信号 图2.1基于PLC的步进电机控制系统 脉冲助率 放大器
西南石油大学本科毕业设计(开题报告) 止,绕组中的电流经二极管V 4及电阻R 2向高压电源放电,电流迅速下降 万案二 驱动电路选择单一电压型电源。图 3-1是单一电压型电源的一相功放电路(m 相 电机有m 个这样的功放的电路)的原理图。来自分配器的信号经过几级电流放大后加 到三极管y 的基极,控制乂的导通和截止。y 是功放电路的末级功放管,它与步进电 机一相绕组串联,所以通过功放管y 的电流与通过步进电机的电流是相等的。 单一电 11 聲骗 图3-1单电压驱动电路原理图 Jtl 图3-2 高低电压驱动电路原理图 图3-3 不同串联电阻值对电流的影响 图3-4不同串联电阻对矩频特性的影响 图3-5绕组换接时电流和电压的变化
基于51系列单片机控制步进电机调速实验 (自动保存的)
基于51系列单片机控制步进电机调速实验 实验指导书 仇国庆编写 重庆邮电大学自动化学院 自动化专业实验中心 2009年2月
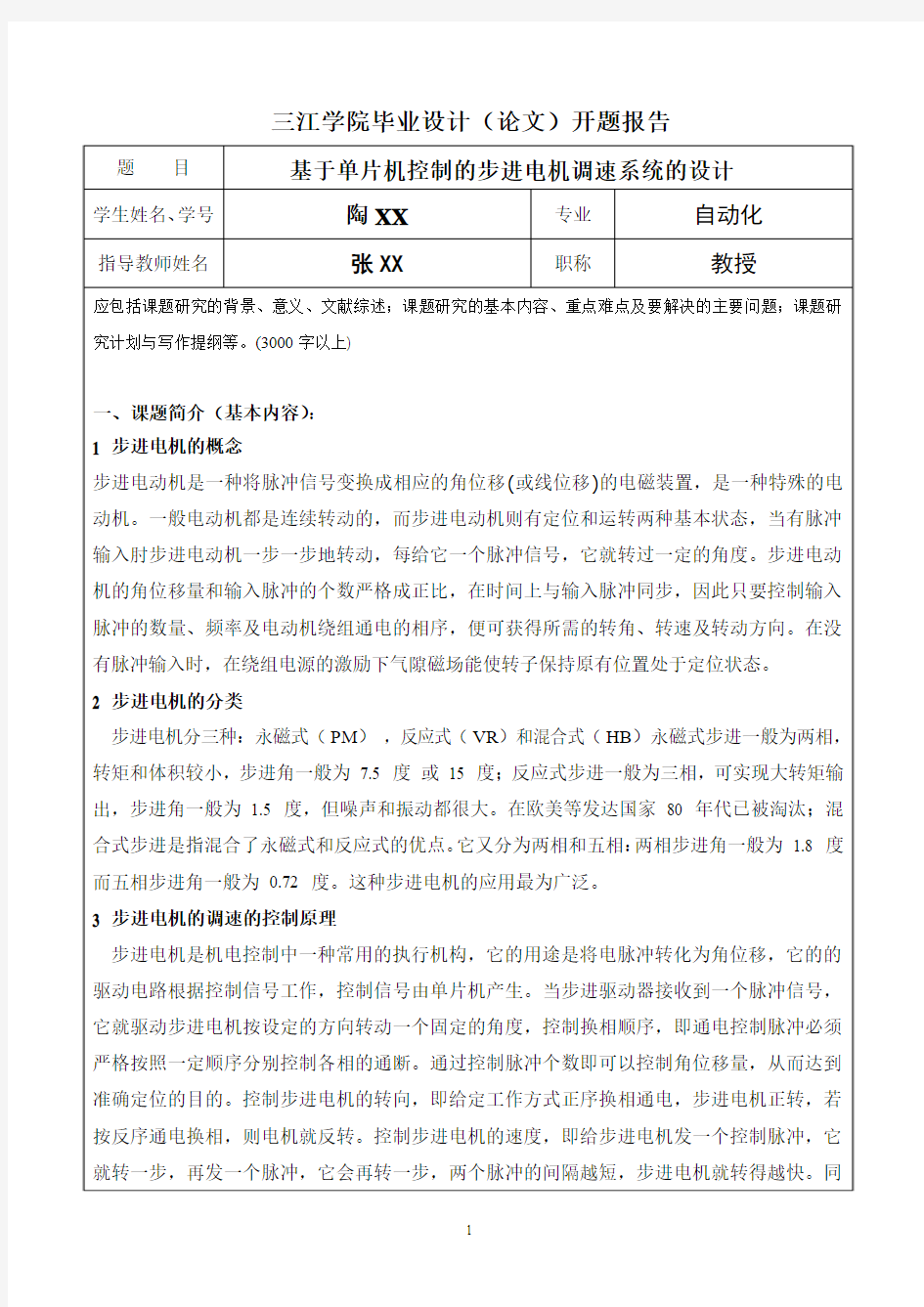
基于51系列单片机控制步进电机调速实验 实验目的及要求: 1、熟悉步进电机的工作原理 2、熟悉51系列单片机的工作原理及调试方法 3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量) 4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。速度设定由键盘设定,步进电机的反馈速度由LED 数码管显示。 实验原理: 步进电机控制原理 一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。由于输入的是脉冲信号,输出的角位移是断续的,所 以又称为脉冲电动机。随着数字控制系统的发展,步进电动机的应用将 逐渐扩大。 步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来 进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由 脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号 可以由单片机产生。 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几 何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻 两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐, B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)
步进电机控制开题报告
毕业设计(论文)开题报告 学生专业 学号姓名班级 指导教师及职称 题目步进电机控制设计结合毕业设计(论文)课题情况,根据所 查阅的文献资料,每人撰写500 字左右的文献综述: 一、选题的背景和意义: 步进电动机是数字控制系统中一种十分重要的自动化执行元件,在工业自动化装备,办公自 动化设备中有着广泛的运用,近年来,控制技术、计算机技术以及微电子技术的迅速发展,有力 地推动了步进电动机控制技术的进步,提高了步进电动机运动控制装置的应用水平。过去电动机 的控制多用模拟法,随着计算机应用技术的迅速发展,电动机的控制也发生了深刻的变化,步进 电机常常和计算机一起组成高精度的数字控制系统。模拟控制已经逐渐被使用单片机为主的混合 控制和全数字控制所取代。 步进电机是一种将电脉冲信号转换成角位移的执行机构,其转子角位移与输入脉冲的频率成 正比,通过改变脉冲频率可以实现大范围的调速;同时,步进电机易于与计算机和其他数字元件 接口,因此被应用于各种数字控制系统中[2] ,本设计的步进电动机控制系统由单片机(控制电路),脉冲分配电路、功率放大电路(驱动电路)、步进电动机及电源系统组成组成。 步进电动机是用电脉冲信号进行控制,将电脉冲信号转换成相应的角位移或线位移的微电动 机,它最突出的优点是可以在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反 转控制及制动等,并且用其组成的开环系统既简单、廉价,又非常可行,因此在打印机等办公自 动化设备以及各种控制装置等众多领域有着极其广泛的应用。随着微电子和计算机技术的发展, 步进电动机的需求量与日俱增,研制步进电机驱动器及其控制系统具有十分重要的意义。
基于单片机的步进电机控制系统
编号: 综合智能电子 实训 (论文)说明书题目: 院(系):使用科技学院 专业:电子信息工程 学生姓名: 学号: 指导教师: 2010年 1 月 6 日
目录 引言 第1章简介 1.1 步进电机 第2章步进电机原理 2.1 步进电机的工作原理 2.1.1结构及基本原理 2.1.2 电机的步进顺序 第3章系统的硬件设计 3.1 系统设计方案 3.2 主从机硬件部件介绍 3.2.1A T89S51简介 3.2.2 TGI2864E简介 3.2.3MAX485 串行通信 3.2.4TIP122 3.2.5 MOC70T2 3.3 LCD显示电路设计 3.4 电机驱动模块设计 第4章系统的软件实现 4.1 系统软件主流程图 4.2 系统初始化流程图 4.3 部分子程序 第五章总结 致谢 参考文献 摘要:本文使用单片机、步进电机驱动芯片、字符型LCD和键盘阵列,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/Y轴方向联动。文中讨论了一种以最少参数确定一条圆弧轨迹的插补方法和步进电机变频调速的方法。步进电机控制系统的开发采用了软硬件协同仿真的方法,可以有效地减少系统开发的周期和成本。最后给出了步进电机控制系统的使用实例。
关键词:步进电机控制系统,插补算法,变频调速,软硬件协同仿真 In this paper, microcontroller, stepper motor driver chips, character LCD and keypad array, build a set of stepper motor controller and driver as one of the stepping motor control system. Two-dimensional table as a charged object by stepper motor drive ball screw in X / Y axis linkage. This paper discusses a minimum of parameters to determine the trajectory of a circular interpolation method and the method of frequency control stepper motor. Stepper motor control system has been developed using the software and hardware co-simulation method, can effectively reduce the system development cycle and cost. Finally, the stepper motor control system application examples.
PLC控制伺服电机变频调速开题报告
开题报告 一、个人信息 学号:姓名:毕业院校: 性别:男学院:自动化专业名称:自动化 民族:汉政治面貌:出生日期: 二、题目信息 题目编号:题目:PLC控制伺服电机变频调速控制系统设计 指导教师:题目类型:理论研究类题目来源:国家级项目 面向专业:自动化研究方向: 三、主要学习工作经历: 四、选题依据 选题背景与意义: 通过PLC控制伺服电机能够获得精准的定位,同时也有的通过步进电机来获取定位,步进电机是一种将电脉冲转化为角位移的执行机构,是一种控制用的特种电机,利用其没有累积误差的特点,广泛应用开环控制。但是,想必伺服电机的闭环控制,控制精度不够。 伺服系统的发展经历了由液压到电气的过程,电气伺服系统根据所驱动电机类型分为直流(DC)伺服系统和交流(AC)伺服系统,交流伺服系统按其采用的驱动电机类型分为永磁同步(SM型)电动机交流伺服系统和感应式异步(IM型)电动机交流伺服系统。由于直流伺服电动机存在机械结构复杂,维修工作量大包括电刷、换向器等则成为直流伺服驱动技术发展的瓶颈。随着微处理技术、大功率电力电子技术的成熟和电机永磁材料的发展和成本降低,交流伺服系统得到长足发展并将逐步取代直流伺服系统。 随着电机理论、永磁材料、电力电子技术、控制理论和计算机技术的惊人发展。交流伺服系统的研究和应用,自20世纪20年代末以来,取得了举世瞩目的进展,
已具备有宽调速范围,高稳速精度、快动态响应及四象限运行等良好的技术性能,其动、静态特性已完全可以与直流伺服系统相媲美。多年来,“交流取代直流伺服”这一愿望正逐渐变为现实,并不断有新的研究成果和新产品出现。 近十年来,国内外日益完善的永磁交流伺服系统不断涌现,性能指标不断提高,应用范围不断大。纵观日前国内市场现状,国外知名品牌的永磁交流伺服系统占据了国内绝大多数中高端应用领域,而国内成熟产品主要应用在中低端设备领域中,如简易数控机床、服装加工机械、包装机械等等、究其原因是国外知名品牌的产品具有较明显的技术优势。总之,伺服系统正朝着交流化、全数字化、采用新型电力电子半导体器件、高度密集化、智能化、模块化和网络化的方向发展。 选题的意义:(1)采用PLC的伺服控制是运动控制的一种方式,特别是在精确定位控制中大量应用。本课题结合实际应用,对PLC及伺服系统进行深入学习。 (2)通过本题进一步对PLC、触摸屏以及伺服系统接口设计的学习,加强理论知识在实践中的应用。
基于单片机的步进电机驱动控制
基于单片机的步进电机驱动控制 一、步进电机概述 1.步进电机的定义 步进电机指的是以数字脉冲信号作为电机线或教位移的控制信号,并以数字脉冲频率对电机的转速进行控制的动力控制系统。 在负载正常范围的情况下,步进电机的运行状态只和数字脉冲发生器提供的信号的频率和脉冲占空比有关,一般情况下,电机的状态不受负载的影响。电机的运行角度只和每次所给予的脉冲信号强度有关,而电机的运行速度也只和脉冲信号的频率有直接关 系。这种采用弱点控制强电的控制方式使得步进电机在速度、位移等控制领域有着普通电机不能比拟的优势。 2.驱动控制系统框图 步进电机控制系统有着精确控制、运行稳定的特性,这一其他电机不能比拟的优势使得步进电机得到了广泛的应用。而一般对步进电机控制系统的驱动必须要包含脉冲信 号发生部分,功放部分和驱动控制部分等几个模块电路,我们根据这些通过的模块电路,可将步进电机控制系统的通用框图绘制如下: 在上图的步进电机驱动控制系统方框图中,控制步进电机运行状态的脉冲信号一 般由集成芯片产生,可以是单片机、等智能芯片,也可以是一般的数字电路集成芯片。信号分配环节则要根据步进电机的型号来选择,如四相步进电机有四相四拍和四相 八拍种信号分配的方式;两相步进电机有两相四拍和八拍等脉冲加载形式。功放部分 在驱动环节上显得尤为重要。动态平均电流是步进电机转矩大小的决定因素,前提条件 是电机的速度。电机力矩与平均电流成正比,驱动系统对电机的反电势消弱越多,则平 均电流就越大。 我们一般可以用恒压和恒压串电阻的方法来驱动,或者在条件允许的情况下我们可以用高低压驱动、恒流和细分数等方法来驱动实际的应用过程种,多采用数字集成驱 动芯片作为步进电机的驱动手段。 二、现阶段国内外步进电机驱动的常用方式 1.变频器控制方式 使用变频器对步进电机进行驱动控制时,可以很好的解决步进电机在启动和停止时 容易失步的问题,提高了系统的控制精度。但是变频器的应用成本较高,结构和操作也 比较复杂,无形中提高步进电机的控制难度。 2.PLC控制方式 使用ABB、西门子、欧姆龙等国际知名生产制造商研发的系列产品可以 实现对步进电机的理想化控制,但是基于核心的步进电机控制系统成本高昂,且 难以实现精确控制,在本系统中不太适合。 3.单片机控制方式 随着嵌入式系统在工业控制领域中的广泛应用,以单片机特别是系列单片机 作为控制核心的步进电机控制电路在生产生活领域得到了普及,单片机有着大规模数字
完整的单片机控制步进电机程序
#include "reg52.h" #include "INTRINS.H" #include
基于单片机的步进电机控制系统设计开题报告
二、学士学位论文(设计)开题报告 学生姓名所在 院系 所在 班级 指导 教师 学生学号专业 方向 开题 时间 导师 职称 论文 题目 基于单片机的步进电机控制系统设计 文献综述: 1.前言 在电气时代的今天,电动机一直在现代的生产和生活中起着十分重要的作用。据资料统计,现有的90%以上的动力源来自于电动机,我国生产的电能大约有60%用于电动机。电动机与人们的生活密切相关,而步进电机作为机电一体化的关键产品之一,是一种专门用于位置和速度精确控制的特种电动机。步进电机最大的特点是“数字化”,它是一种将电脉冲信号转换成直线位移或角位移的控制微电机,其机械角位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成比例。通过改变电脉冲频率,可在大范围内进行调速。同时,该电机还能快速起动、制动、反转和自锁。此外,步进电机易于实现与计算机或其他数字元件接口,适用于数字控制系统。步进电机只需采用最简单的开环控制就可取得非常高的控制精度,且这种系统不需要反馈信号,系统硬件实施比较简单。 采用低价的单片机控制系统,可直接对步进电机进行控制,省去了昂贵的专用步进电机控制器,简化了硬件线路,降低了成本,提高了系统的可靠性。 2.主题 步进电机最早是在1920年由英国人所开发。1950年后期晶体管的发明也逐渐应用在步进电机上,这对于数字化的控制变得更为容易。以后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解性能、高响应性、信赖性等灵活控制性高的机械系统中。在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 单片机是现代电子技术的新兴领域,它的出现极大的推动了电子工业的发展。已经它成为电子系统设计中组为普遍应用的手段。近年来单片机技术得到了突飞猛进的发展,各种的单片机开发工具层出不穷,比如虚拟仿真技术。这种新型的应用技术,在原理图设计阶段就可以对对单片机应用设计进行评估,检验所设计电路是否能够达到要求的技术指标,功能需求,还可以通过改变电子元器件的参数达到是电路设计最
51单片机控制四相步进电机解析
51单片机控制四相步进电机 2009年07月21日星期二 12:44 51单片机控制四相步进电机 2009-03-01 18:53 接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。这几天给自己的任务就是搞定步进电机的单片机控制。以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下 图所示: 详细内容: https://www.360docs.net/doc/7013860050.html,/31907887_d.h tml
拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。 如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四
线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图: C51程序代码为: 代码一 #include
基于单片机步进电机控制系统设计毕业设计开题报告
邮电与信息工程学院毕业设计(论文)开题报告 学生姓名:李XX 学号:0841020000 专业:机械设计制造及其自动化 设计(论文)题目:基于单片机的步进电机 控制系统的设计 指导教师: 章XX 2012 年 3 月 1 日
1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述 文献综述 一.步进电机控制系统研究背景 步进电机是数字控制系统中的一种执行元件,其功能是将脉冲电信号变换为相应的角位移或直线位移,即给一个脉冲信号,步进电机就转动一个角度,步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。因此非常适合单片机控制。步进电机作为控制执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统和精密机械等领域。例如,在仪器仪表,机床设备以及计算机的外围设备中(如打印机和绘图仪等),凡需要对转角进行精确控制的情况下,使用步进电机最为理想。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 以前的步进电机控制系统采用分立元件的控制回路,或者集成电路,不仅调试安装复杂,要消耗大量元器件,而且一旦定型之后,要改变控制方案就一定要重新设计电路,不利于系统的改进升级。基于微型单片机的控制系统则通过软件来控制步进电机,能够更好地发挥步进电机的潜力。因此,用微型单片机控制步进电机己经成为了一种必然的趋势,也符合数字化的时代发展要求。 二.国内外研究步进电机控制系统概况 我国数控机械和普通机床的微机改造中大多数均采用开环步进电机控制系统,为了适应一些领域中高精度定位和运行平稳性的要求,我国改革开放初期研究步进电机细分驱动技术,细分驱动是指在每次脉冲切换时,不是将绕组的全部电流通入或切除,而是只改变相应绕组中电流的一部分,电动机的合成磁势也只旋转步距角的一部分。细分包括振荡器、环行分配器控制的细分驱动。另外还有基于单片机斩波恒流驱动、基于单片机的直流电压驱动三种常见驱动方式,除上述三种步进电机的驱动方案之外,目前报道的驱动方案还有根据汇编语言或C语言进行软件开发,通过串行或并行通行的方式实现
51单片机控制步进电机程序及硬件电路图
#include
TL0 = 0x0C; //设定时每隔0.5ms中断一次TR0 = 1; //开始计数 turn = 0; speedlevel = 2; delay(10000); speedlevel = 1; do{ speedlevel = 2; delay(10000); speedlevel = 1; delay(10000); stop_flag=1; delay(10000); stop_flag=0; }while(1); } //定时器0中断处理 void timeint(void) interrupt 1 { TH0=0xFE; TL0=0x0C; //设定时每隔0.5ms中断一次count++; spcount--; if(spcount<=0) { spcount = speedlevel; gorun(); } } void delay(unsigned int endcount) { count=0; do{}while(count 西安交通大学城市学院 本科毕业设计(论文)开题报告 题目基于51单片机的PWM 直流电机调速系统设计 所在系电气与信息工程系 学生姓名 XX 专业测控技术与仪器 班级测控XXX学号 XXXXX 指导老师 XXXXXX 教学服务中心制表 2014年3月 对题目的陈述 1.选题意义与国内外研究现状,主要研究内容及技术方法 1.1选题的研究目的及意义 现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元件组成的自动控制系统联系起来,而电力拖动则可视为自动化电力拖动系统的简称。在这一系统中可对生产机械进行自动控制。 在如今的现实生活中,自动化控制系统已在各行各业得到广泛的应用和发展,其中自动调速系统的应用则起着尤为重要的作用。虽然直流电机不如交流电机那样结构简单、价格便宜、制造方便、容易维护,但是它具有良好的起制动性能,宜于在广泛的范围内平滑调速,所以直流调速系统至今仍是自动调速系统中的主要形式。 随着电力电子技术的发展,开关速度更快、控制更容易的全控型功率器件MOSFET 和GBT成为主流,脉宽调制技术表现出较大的优越性:主电路线路简单,需要用的功率元件少;开关频率高、电流容易连续、谐波少、电机损耗和发热都较小;低速性能好、稳速精度高,因而调速范围宽;系统快速响应性能好,动态抗扰能力强;主电路元件工作在开关状态、导通损耗小、装置效率较高。近年来,微型计算机技术发展速度飞快,以计算机为主导的信息技术作为一崭新的生产力,正向社会的各个领域渗透,直流调速系统向数字化方向发展成为趋势。 1.2国内外研究现状 直流电机脉冲宽带调制(Pulse Width Modulation――简称PWM)调速系统产生于70年代中期。最早用于不可逆、小功率驱动,例如自动跟踪天文望远镜、自动记录仪表等。近十多年来,由于晶体管器件水平的提高及电路技术的发展,同时又因出现了宽调速永磁直流电机,它们之间的结合促使PWM技术的高速发展,并使电气驱动技术推进到一个新的高度。 在国外,PWM最早是在军事工业以及空间技术中应用。它以优越的性能,满足那些高速度、高精度随动跟踪系统的需求。近十年来,进一步扩散到民用工业,特别是在机床行业、自动生产线及机器人等领域中广泛应用。 如今,电子技术、计算机技术和电机控制技术相结合的趋势更为明显,促使电机控制技术以更快的速度发展着。随着市场的发展,客户对电机驱动控制要求越来越高,希 开题报告 电气工程及其自动化 步进电机控制系统的设计 一、课题研究意义及现状 步进电机又称为阶跃电动机或脉冲电动机,它是基于最基本的电磁感应作用,是一种将电脉冲转化为角位移的执行机构,由于其具有的显著特点,使得它在电机的大家族中扮演着很重要的角色。 步进电机的原始模型起源于1830年至1860年,我国步进电机的研究及发展开始于上世纪50年代后期,最初主要是国家资助的高等院校和科研机构为研究一些装置开发的少量产品。70年代开始大量生产和应用步进电机,至今,由于对步进电机精确模型做了大量研究工作,各种混合式步进电机及驱动器作为产品被广泛生产和应用。现应用于工业自动控制、组合机床、数控机床、机器人、计算机外围设备、大型望远镜、卫星天线定位系统等等。随着科技的发展、技术的进步和电子技术的更新,步进电机的应用领域变得更加的宽广,这样也对步进电机的运行性能提出了更加苛刻的要求。 虽然步进电机是一种数控元件,易于同数字电路接口。但是,一般数字电路的信号远远不足以驱动步进电机,必须有一个与之匹配的驱动电路来驱动步进电机,步进电机和步进电机驱动电路两者组成步进电机系统。随着电力电子技术、自动化控制技术以及计算机技术的发展,开始大量使用单片机、FPGA、CPLD、PLC等对步进电机进行控制和驱动,结果是缩短了驱动器的研发周期,明显提高了整机的性能和稳定性。 PSoC可编程片上系统比标准的固定功能的微控制器有明显的优势,采用一个微控制器,一个PSoC器件最多可集成100种外设功能,PSoC系统集成有MCU、FLASH及可编程模拟和数字模块,与上面提到的方案相比通过PSoC单片机控制步进电机,可以实现低成本,小体积,单芯片,高效率的开发,甚至可以在开发最后一刻根据突发状况而改变方案。 二、课题研究的主要内容和预期目标 该课题主要分一下内容进行设计: (1)了解和研究步进电机的结构及其工作原理; (2)研究实现常用步进电机控制的方案。 (3)Cypress Designer5.0的学习和软件的操作使用 (4)分析基于PSoC的步进电机控制的解决方案,确定系统设计中需要用到CY8C29466的内部结构、通用I/O数目、所需Flash及SRAM空间大小等参数; 51单片机驱动步进电机的方法2019.02 这款步进电机的驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!!! 该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。 采用51驱动ULN2003的方法进行驱动。 ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。 ;****************************************************************************** ;*************************步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19 ;--------------------------------------------------------------------------------- ; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!!! ;--------------------------------------------------------------------------------- ; A组线圈对应P2.4 ; B组线圈对应P2.5 ; C组线圈对应P2.6 ; D组线圈对应P2.7 ; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转7.5 度) ;---------------------------------------------------------------------------------- ;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100H MAIN: MOV R3,#144 正转3 圈共144 脉冲 START: MOV R0,#00H START1: MOV P2,#00H MOV A,R0 MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START 对A 的判断,当A = 0 时则转到START MOV P2,A LCALL DELAY INC R0 DJNZ R3,START1 MOV P2,#00H LCALL DELAY1 ;-----------------------------反转------------------------ MOV R3,#144 反转一圈共144 个脉冲 START2: MOV P2,#00H 用单片机控制步进电机 步进电机是机电控制中一种常用的执行机构,它的用途是将电脉冲转化为角位移,通俗地说:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 一、步进电机常识 常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB),永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 二、永磁式步进电机的控制 下面以电子爱好者业余制作中常用的永磁式步进电机为例,来介绍如何用单片机控制步进电机。 图1是35BY型永磁步进电机的外形图,图2是该电机的接线图,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5根引出线。要使用步进电机转动,只要轮流给各引出端通电即可。将COM端标识为C,只要AC、 C、BC、 C,轮流加电就能驱动步进电机运转,加电的方式可以有多种,如果将COM端接正电源,那么只要用开关元件(如三极管),将A、、B、轮流接地。 下表列出了该电机的一些典型参数: 表1 35BY48S03型步机电机参数 型号步距角相数电压电流电阻最大静转距定位转距转动惯量 35BY48S03 7.5 4 12 0.26 47 180 65 2.5 有了这些参数,不难设计出控制电路,因其工作电压为12V,最大电流为0.26A,因此用一块开路输出达林顿驱动器(ULN2003)来作为驱动,通过P1.4~P1.7来控制各线圈的接通与切断,电路如图3所示。开机时,P1.4~P1.7均为高电平,依次将P1.4~P1.7切换为低电平即可驱动步进电机运行,注意在切换之前将前一个输出引脚变为高电平。如果要改变电机的 毕业设计开题报告 一.选题的依据、意义和理论或实际应用方面的价值 随着农业现代化的发展,设施园艺工程因其涉及学科广、科技含量高、与人民生活关系密切,己越来越受到世界各国的重视。这也为我国大型现代化植物大棚的发展提供了极好的机遇,并产生巨大的推动作用。我国的现代化植物大棚是在引进与自我开发并进的过程中发展起来的。温室大棚是一种可以改变植物生长环境、为植物生长创造最佳条件、避免外界四季变化和恶劣气候对其影响的理想场所。实现温室大棚环境智能控制的目的是主动地调节温度、湿度、光照和二氧化碳气体浓度等环境因素,以满足作物最佳生长环境的要求。其中,温湿度是最重要的环境因数。目前,我国绝大多数温室大棚设备都比较简陋,温室大棚环境仍然靠人工根据经验来管理。环境因素的自动调节和控制的研究正处于起步阶段,已严重影响了设施农业的大力发展。特别是北方地区因其纬度高,寒冷季节长,四季温差和昼夜温差较大,不利于作物生长,目前应用于温室大棚的温湿度检测系统大多采用传统的温湿度检测。这种温湿度采集系统需要在温室大棚内布置大量的测温电缆和湿度传感器,才能把现场传感器的信号送到采集卡上,安装和拆卸繁杂,成本也高。同时线路上传送的是模拟信号,易受干扰和损耗,测量误差也比较大,不利于控制者根据温度变化及时做出决定。在这样的形式下,开发一种实时性高、精度高,能够综合处理多点温度信息的测控系统就很有必要。 二.本课题在国内外的研究现状 我国的现代化温室是在引进与自我开发并进的过程中发展起来的。国外对温室环境控制技术研究较早,始于20世纪70年代。先是采用模拟式的组合仪表,采集现场信息并进行指示、记录和控制。80年代末出现了分布式控制系统。目前正开发和研制计算机数据采集控制系统的多因子综合控制系统。现在世界各国的温室控制技术发展很快,一些国家在实现自动化的基础上正向着完全自动化、无人化的方向发展。目前,一些经济发达的国家和地区已经研制并实现计算机自动控制的现代化高科技温室,并且形成了令人惊羡的植物土厂。而我国的温室系统属于半开放系统,温室内环境控制水平比较低,仍靠人工根据经验来管理。而且,国内的控制系统主要用于单因子控制,因而设施现代化水平低,对温室环境的调控能力差,产品的质量和产量难以得到保证。正是这些塑料大棚和日光温室对于解决城乡人民的蔬菜供应发挥着主力军的作用。 三.课题研究的内容及拟采取的方法 本设计以AT89C51 单片机的温度、湿度测量和控制系统为核心来对温湿度进行实时巡检。单片机能独立完成各自功能,同时能根据主控机的指令对温度 51单片机控制四相步进电机电路图 51单片机控制四相步进电机 接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。这几天给自己的任务就是搞定步进电机的单片机控制。以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所 示: 拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。 如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图: C51程序代码为: 代码一 #include EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFC; TL0 = 0x18; //设定时每隔1ms中断一次 TR0 = 1; //开始计数 startrun: P1_3 = 0; P1_0 = 1; delay(); P1_0 = 0; P1_1 = 1; delay(); P1_1 = 0; P1_2 = 1; delay(); P1_2 = 0; P1_3 = 1; delay(); goto startrun; } //定时器0中断处理 void timeint(void) interrupt 1基于51单片机的PWM直流电机调速系统设计——开题报告
步进电机控制系统的设计【开题报告】
51单片机驱动步进电机的方法(详解)
用单片机控制步进电机
温室控制系统设计开题报告
最新51单片机控制四相步进电机电路图汇总