雷达大作业---振幅和差角度测量及仿真
雷达原理大作业
单脉冲自动测角的原理及应用
学院:电子工程学院
作者:
2016年5月21日
单脉冲自动测角的原理及应用
一.摘要
单脉冲测角法是属于振幅法测角中的等信号法中的一种,其测角精度高,抗干扰能力强,
在现实中得到了广泛的应用。而其中对于接收支路要求不太严格的双平面振幅和差式单脉冲雷达,更是备受青睐。
本文首先讲述了单平面振幅和差式单脉冲雷达自动测角的原理,再简述了双平面振幅和
差式单脉冲雷达自动测角的结构框图,接着简述了本文仿真所用的一些原理和公式推导,包括天线方向图函数及其导数的推导,最后做了基于高斯形天线方向图函数的单脉冲自动测
角,基于辛克函数形天线方向图函数的单脉冲自动测角,和基于高斯形天线方向图函数的
双平面单脉冲自动测角。源代码在附录里。
.重要的符号说明
三.单平面振幅和差式单脉冲自动测角原理
单脉冲测角法是属于振幅法测角中的等信号法中的一种。在单平面内,两个相同的波束
部分重叠,交叠方向即为等信号轴的方向。将这两个波束接收到的回波信号进行比较就可以
在一定范围内,一定精度要求下测到目标的所在角度。因为两个波束同时接到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲即可,所以称之为“单脉冲”。
因取出角误差的具体方式不同,单脉冲雷达种类很多,其中应用最广的是振幅和差式单脉冲
雷达,其基本原理说明如下:
1?角误差信号
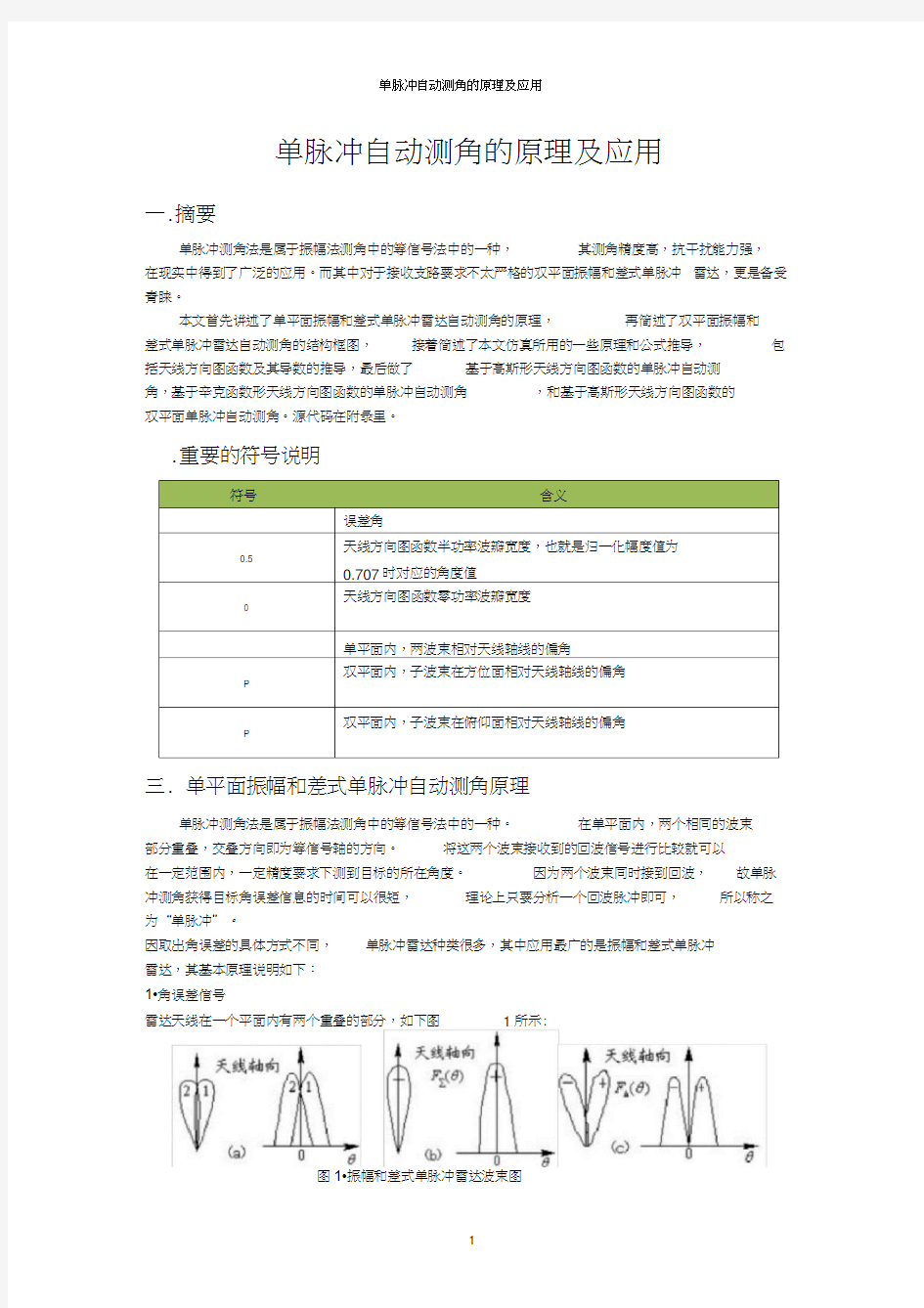
雷达天线在一个平面内有两个重叠的部分,如下图1所示:
图1?振幅和差式单脉冲雷达波束图
(a )两馈源形成的波束 (b )和波束(c )差波束
振幅和差式单脉冲雷达取得角误差信号基本方法是将这两个波束同时收到的信号进行 和差处理,分别得到和信号和差信号。其中差信号即为该角平面内角误差信号。
若目标处在天线轴方向(等信号轴),误差角 0 ,则两波束收到的回波信号振幅相
同,差信号等于0。目标偏离等信号轴而有一个误差角 时,差信号输出振幅与
成正比而
其符号则由偏离方向决定。
2?和差比较器
这里主要使用双 T 插头,示意图如下图 2(a )所示。它有四个端口:和端,差端和 1,
输出;从1,2端输入同相信号时,和端输出两信号之和,差端输出两信号之差。
(a ) (占〕
图2?双T 接头和差比较器示意图 ⑻双T 接头(b )和差比较器示意图
在发射信号时,从发射机来的信号加在和端,故
1,2端输出等幅同相的信号,两波束在
空间各点产生的场强同相相加,形成发射和波束的天线方向性函数为
F ()。
接收时,回波脉冲同时加到
1,2端,此时在和端,输出两个回波信号同相相加之和,记
为E ;在差端,输出两信号反相相加之和,记为
E
2端。假定四个端都是匹配的,则从和端输出信号时,
1,2端输出等幅同相的信号,差端无
F (),两波束衰减倍数为 k ,两波束相对天
线轴线的偏角为
则对于
方向的目标来说
和信号振幅为: E kF ( )F() 差信号振幅为:
E
kF ( )F()
其中:F () F(
)F(),
实际情况下,
是很小的,可以对 F (
kF ( )F( )
kF 2() kF ( )F(
) kF ( )F ()
F ()
F(
) F(
)。
)和F( )在
附近做一阶泰勒展开
A
假设两个波束方向性函数完全相同,记为
F( ) F( ) F ( ) o( 2) F( ) F () F(
) F( )
F ( )
o( 2) F( ) F ()
四. 双平面振幅和差式单脉冲自动测角简述
为了对空中目标进行自动方向跟踪,必须在方位角和俯仰角两个角平面上进行角跟踪, 因而必须获得方位角和俯仰角的误差信号。 为此,需要用4个馈源照射一个反射体,以形成
四个对称的相互部分重叠的波束。
假设其中一个子波束的三维方向图函数为
F(,),其中 代表方位角,
代表俯
仰角,p 和p 分别为子波束在方位面和俯仰面相对中心轴的偏离角。
则图3所示的4个子波束的数学表达式为: 子波束 A : F A ( , ) F( p , p ) 子波束 B : F B ( , ) F( p
则:
E
kF 2( ) k[F( ) F ( ) F(
E
kF ( )F ( ) k[F( ) F ( ) F()
4kF( )F ()
则.邑 4kF( )F ( ) F ()
、? E
4kF 2( ) F()
)F ( ) ]2 4kF 2()
F ( ) ][(F( ) F ( ) ) (F( ) F ())]
,其中是个常数,
F (
)。
F()
据此,可以求得
,这就是单平面振幅和差式单脉冲雷达测角的公式。
双平面上天线四个子波束在三维空间中的辐射图
图3.雷达天线空间子波束分布图
子波束C: F C( , ) F( p , p )
子波束D: F D( , ) F( p , p )
双平面振幅和差式单脉冲自动测角的原理框图如下图4所示:
其中和信号为 F ( ,)F A(, )F B( , ) F C(, )F D( ,)
俯仰角误差信-号为: F (,) F A( , ) F B(,) F C(, )F D(, ) 方位角误差信-号为: F (,) F A(,) F D(,) F B(, )F C(, ) 再根据之前的单平面振幅和差式单脉冲雷达测角的公式有:
1 E 1 E
E||E|
1 F (,)
F ( p, p)
p ' p
1 F (,)
F ( p, p)
p' p
五.仿真所用原理和公式推导
1?单平面单脉冲雷达方向图函数
A.高斯形方向图函数
其中,
其导函数为F ()
B .辛克函数形方向图函数
2 2
cos(
) sin( )
0 0 2~~
2
2?双平面脉冲雷达方向图函数
此处对三维天线使用简化模型,
函数,设p 和p 分别为子波束在方位面和俯仰面相对中心轴的偏离角:
2
1 4 -----
2 0.5
其偏导函数为:
3?关于两波束相对天线轴线的偏角的选取: 两波束相对天线轴线的偏角 一般
选择为:
其方向图函数为:F () 2
1.4 _
2
0.5
其方向图函数为:F() Sa(2 —),
向图相乘的结果,即 F( , ) F )F ()。
由于仿真中只以高斯形方向图函数为例做了仿真, 所以此处只讨论三维的高斯形方向图 0.5
其导函数为F ()
将三维天线看做由两个二维平面 (方位面和俯仰面)方
1.4
2 0.5
F(,)
2.8
2 0.5
P e
1.4
2
p 0.5
2
1.4
丄
2 0.5
2.8
2 0.5
P e
1.4
2 p 0.5
*
2
1.4
亠
2 0.5
。
2.8
~2_
0.5
在单平面上,直接取
六. 仿真结果
1.基于高斯形天线方向图函数的单脉冲自动测角 下图是
两馈源形成的波束,和波束和差波束波形图
F 图是单平面上目标所在角度和测得角度的比较曲线:
0.5
0.5是半功率波瓣宽度,也就是归一化幅度为 0.707时候对应的 值
在双平面上,可以取
0.5 °
角度 ffi(rad )e
角度值(rad )6?
卜F?初)波形
雷达运动目标检测大作业
非均匀空时自适应处理 摘要 本文首先依次介绍了在非均匀环境下的STAP处理法,包括降维、降秩以及LSMI方法,接着重点分析了直接数据域(DDD)方法的原理及实现过程,最后针对直接数据域方法进行了仿真实验。 引言 机载雷达对运动目标检测时, 面临的主要问题是如何抑制强大的地面杂波和各种类型的干扰,空时自适应处理(STAP)是解决该问题的关键技术。STAP 技术通过对杂波或干扰训练样本分布特性的实时学习来来形成空域—时域二维自适应权值,实现对机载雷达杂波和干扰的有效抑制。 STAP技术在形成自适应权值时,需要计算杂波协方差矩阵R。实际系统的协方差矩阵是估计得到的,即先在待检测距离单元的临近单元测得K个二维数 据矢量样本V i(i=1,2…K),再计算R的估计值?=Σ i=1K V i V i H∕K,然后可得自 适应权值W=μR^-1S,其中μ为常数,S为空时导向矢量。临近训练样本的选择必须满足独立同分布(IID)条件。同时,为了使由杂波协方差矩阵估计引起的性能损失控制在3dB内,要求均匀训练样本数K至少要2倍于其系统自由度(DOF)。如果所选样本非均匀,则形成的权值无法有效对消待检测单元中所含有的杂波和干扰,从而大大降低对运动目标的检测性能。 在实际应用中, 机载雷达面临的杂波环境往往是非均匀的, 这对经典的S T A P 技术带来了极大的挑战。针对这一难题, 许多新的适用于非均匀杂波环境的S T A P 方法不断被提出。 1、解决非均匀样本的方法 1.1、降维方法 降维方法的最初目的是为了减少空时自适应处理时所需的巨大运算量, 但后来发现该类方法同时大大减少了对均匀训练样本数的需求, 对非均匀情况下杂波抑制起到了积极的作用。降维方法将每次自适应处理所需要抑制的杂波范围限制在某一个较小杂波子空间内, 根据RMB准则和Brennan定理, 自适应处理时所需要的均匀训练样本数由2 倍于整体系统自由度减至降维后2 倍于子空间系统自由度。降维程度越高, 对均匀训练样本的需求就越少。降维方法属固定结构方法, 无法充分利用杂波的统计特性。当辅助波束与杂波谱匹配很好时, 处理性能往往很好。反之, 则性能下降。 1.2、降秩方法 与固定结构降维方法相反, 降秩方法充分利用回波中杂波的分布特性, 每次处理选取完备杂波空间来形成自适应权值对消杂波分量, 可看作依赖回波数据的自适应降维方法。该类方法在形成权值过程中利用的信息中不含噪声分量, 所以避免了小样本情况下噪声发散带来的性能下降问题, 故减少了对均匀训练样本数的需求。同样, 该类方法在满足信杂噪比损失不超过 3 d B 条件时所需的训练样本数约为 2 倍的杂波子空间的维数。从处理器结构上来看, 降秩方法可
电子测量技术离线作业分析
电子测量技术 第一次作业 四、主观题(共12道小题) 17.示值相对误差定义为( 绝对误差 )与( 被测量示值)的比值,通常用百分数来表示。 18.测量值的数学期望,就是当测量次数n趋近无穷大时,它的各次测量值的( 算术平均值)。 19.测量误差按性质和特点的不同,分为(随机)误差、( 系统)误差和(粗大)误差。 20.有界性、对称性、( 抵偿)性、( 单峰 )性是随机误差的重要特性,我们可通过(多次测量取平均值 )的办法来削弱随机误差对测量结果的影响。 21.在测量数据为正态分布时,如果测量次数足够多,习惯上采用( 莱特)准则判别异常数据。 序号 1 2 3 4 5 6 7 8 9 电压/mV 10.32 10.28 10.21 10.41 10.25 10.52 10.31 10.32 10.04 试用格拉布斯检验法判别测量数据中是否存在异常值。 23.不确定度是反映被测量之值( 分散性)的参数,其大小可利用(标准差)或其倍数表示,也可以用(置信区间)的半宽来定量表征。 24. (扩展)不确定度等于合成标准不确定度与一个数字因子的乘积,该数字因子称为(包含因子)。 25.已知某被测量X的9次等精度测量值如下: 52.953,52.959,52.961,52.950,52.955,52.950,52.949,52.954,52.955 求测量列的平均值、实验标准差以及测量列的A类标准不确定度。
26.某校准证书说明,标称值为10 W的标准电阻器的电阻R在20°C时为10.000 742 W ±29 mW(p=99%),求该电阻器的标准不确定度,并说明是属于哪一类评定的不确定度。 27.测量某电路的电流I=22.5mA,电压U=12.6V,I和U的标准不确定度分别为u(I)=0.5 mA,u(U)=0.3V,求所耗功率及其合成标准不确定度。(I和U互不相关)
数据库原理_在线作业_4
数据库原理_在线作业_4 交卷时间:2018-01-16 15:35:45 一、单选题 1. (5分) 关系数据库中的投影操作是指从关系中(?) ?A.?建立相应的图形 ?B.?选出若干满足给定条件的元组 ?C.?建立相应的影像 ?D.?选出若干属性列组成新的关系 纠错 得分:?5 知识点:? 关系代数 2. (5分) 消除了部分函数依赖的1NF的关系模式,必定是(?) ?A.?3NF ?B.?2NF ?C.?BCNF ?D.?1NF 纠错 得分:?5 知识点:? 规范化 3. (5分) 关系中的“主属性”不允许取空值是指(?)约束规则 ?A.?实体完整性规则 ?B.?用户定义完整性规则
?C.?数据完整性规则 ?D.?参照完整性规则 纠错 得分:?5 知识点:? 实体完整性 4. (5分) SQL中的视图提高了数据库系统的(?) ?A.?完整性 ?B.?并发控制 ?C.?隔离性 ?D.?安全性 纠错 得分:?5 知识点:? 视图机制 5. (5分) 下列SQL语句中,修改表结构的是(?) ?A.?CREATE ?B.?DELETE ?C.?UPDATE ?D.?ALTER 纠错 得分:?5 知识点:? SQL概述 6. (5分) 下列四项中,不属于数据库系统特点的是(?) ?A.?数据共享性高和数据独立性高
?B.?数据结构化 ?C.?数据由DBMS统一管理和控制 ?D.?数据冗余度高 纠错 得分:?5 知识点:? 数据库系统概述 7. (5分) 用户或应用程序看到的那部分局部逻辑结构和特征的描述是(?),它是模式的逻辑子集 ?A.?子模式 ?B.?模式 ?C.?物理模式 ?D.?内模式 纠错 得分:?5 知识点:? 数据库系统结构 8. (5分) SQL语言中的COMMIT语句的主要作用是(?) ?A.?提交事务 ?B.?返回系统 ?C.?结束程序 ?D.?存储数据 纠错 得分:?5 知识点:? 事务的基本概念 9. (5分) 以下(?)不属于实现数据库系统安全性的主要技术和方法。
雷达大作业---振幅和差角度测量及仿真
雷达原理大作业 单脉冲自动测角的原理及应用 学院:电子工程学院 作者: 2016年5月21日
单脉冲自动测角的原理及应用 一.摘要 单脉冲测角法是属于振幅法测角中的等信号法中的一种,其测角精度高,抗干扰能力强,在现实中得到了广泛的应用。而其中对于接收支路要求不太严格的双平面振幅和差式单脉冲雷达,更是备受青睐。 本文首先讲述了单平面振幅和差式单脉冲雷达自动测角的原理,再简述了双平面振幅和差式单脉冲雷达自动测角的结构框图,接着简述了本文仿真所用的一些原理和公式推导,包括天线方向图函数及其导数的推导,最后做了基于高斯形天线方向图函数的单脉冲自动测角,基于辛克函数形天线方向图函数的单脉冲自动测角,和基于高斯形天线方向图函数的双平面单脉冲自动测角。源代码在附录里。 二.重要的符号说明 三.单平面振幅和差式单脉冲自动测角原理 单脉冲测角法是属于振幅法测角中的等信号法中的一种。在单平面内,两个相同的波束部分重叠,交叠方向即为等信号轴的方向。将这两个波束接收到的回波信号进行比较就可以在一定范围内,一定精度要求下测到目标的所在角度。因为两个波束同时接到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲即可,所以称之为“单脉冲”。 因取出角误差的具体方式不同,单脉冲雷达种类很多,其中应用最广的是振幅和差式单脉冲雷达,其基本原理说明如下: 1.角误差信号 雷达天线在一个平面内有两个重叠的部分,如下图1所示: 图1.振幅和差式单脉冲雷达波束图
(a)两馈源形成的波束 (b)和波束 (c)差波束 振幅和差式单脉冲雷达取得角误差信号基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。其中差信号即为该角平面内角误差信号。 若目标处在天线轴方向(等信号轴),误差角0ε=,则两波束收到的回波信号振幅相同,差信号等于0。目标偏离等信号轴而有一个误差角ε时,差信号输出振幅与ε成正比而其符号则由偏离方向决定。 2.和差比较器 这里主要使用双T 插头,示意图如下图2(a )所示。它有四个端口:和端,差端和1, 2端。假定四个端都是匹配的,则从和端输出信号时,1,2端输出等幅同相的信号,差端无输出;从1,2端输入同相信号时,和端输出两信号之和,差端输出两信号之差。 图2.双T 接头和差比较器示意图 (a)双T 接头 (b) 和差比较器示意图 在发射信号时,从发射机来的信号加在和端,故1,2端输出等幅同相的信号,两波束在空间各点产生的场强同相相加,形成发射和波束的天线方向性函数为()F θ∑。 接收时,回波脉冲同时加到1,2端,此时在和端,输出两个回波信号同相相加之和,记为E ∑;在差端,输出两信号反相相加之和,记为E ?。 假设两个波束方向性函数完全相同,记为()F θ,两波束衰减倍数为k ,两波束相对天线轴线的偏角为δ,则对于θ方向的目标来说: 和信号振幅为:2 ()()()()()E kF F kF F kF θδθθδθθ∑∑∑∑=-++= 差信号振幅为:()()()()()()E kF F kF F kF F θδθθδθθθ?∑∑∑?=--+= 其中:()()()F F F θδθδθ∑=-++,()()()F F F θδθδθ?=--+。 实际情况下,θ是很小的,可以对()F δθ-和()F δθ+在δ附近做一阶泰勒展开:
北京交通大学电子测量大作业
电子测量大作业二----7-14 姓名:王自胜 学号:12212162 班级:铁道信号1204 2014年12月
7-14查阅网络分析仪的技术资料,说明网络分析仪的功能和基本原理,比较网络分析仪和频谱分析仪的异同点 一、网络分析仪的功能 现代网络分析仪已广泛在研发,生产中大量使用,网络分析仪被广泛地应用于分析各种不同部件,材料,电路,设备和系统。无论是在研发阶段为了优化模拟电路的设计,还是为了调试检测电子元器件,矢量网络分析仪都成为一种不可缺少的测量仪器。网络分析仪是一种功能强大的仪器,正确使用时,可以达到极高的精度。它的应用也十分广泛,在很多行业都不可或缺,尤其在测量无线射频(RF)元件和设备的线性特性方面非常有用。现代网络分析仪还可以应用于更具体的场合,例如,信号完整性和材料的测量。随着业界第一款PXI 网络分析仪—NI PXIe - 5630的推出,你完全可以摆脱传统网络分析仪的高成本和大占地面积的束缚,轻松地将网络分析仪应用于设计验证和产线测试。 二、网络分析仪的基本原理 一个任意多端口网络的各端口终端均匹配时,由第n个端口输入的入射行波an将散射到其余一切端口并发射出去。若第m个端口的出射行波为bm,则n口与m口之间的散射参数Smn=bm/an。一个双口网络共有四个散射参数S11、S21、S12和S22。当两个终端均匹配时,S11和S22就分别是端口1和2的反射系网络分析仪数,S21是由1口至2口的传输系数,S12则是反方向的传输系数。当某一端口m终端失配时,由终端反射回来的行波又重新进入m口。这可以等效地看成是m口仍是匹配的,但有一个行波am入射到m口。这样,在任意情况下都可以列出各口等效入射、出射行波与散射参数之间关系的联立方程组。据此可以解出网络的一切特性参数,如终端失配时的输入端反射系数、电压驻波比、输入阻抗以及各种正向反向传输系数等。这就是网络分析仪的最基本的工作原理。单端口网络可视为双口网络的特例,在其中除S11之外,恒有S21=S12=S22。对于多端口网络,除了一个输入和一个输出端口之外,可在其余一切端口都接上匹配负载,从而等效为一个双端口网络。轮流选择各对端口作为等效双口网络的输入、输出端,进行一系列测量并列出相应的方程,即可解得n端口网络的全部n2个散射参数,从而求出n端口网络的一切特性参数。图左为四端口网络分析仪测量S11时测试单元的原理示意,箭头表示各行波的路径。信号源u输出信号经开关S1和定向耦合器D2输入到被测网络的端口1,这就是入射波a1。端口1的反射波(即1口的出射波b1)经定向耦合器D2和开关传到接收机的测量通道。信号源u的输出同时经定向耦合器D1传到接收机的参考通道,这个信号是正比于a1的。于是双通道幅度-相位接收机就测出b1/a1,即测出S11,包括其幅值和相位(或实部和虚部)。测量时,网络的端口2接上匹配负载R1,以满足散射参数所规定的条件。系统中的另一个定向耦合器D3也终接匹配负载R2,以免产生不良影响。其余三个S 参数的测量原理与此类同。图右为测量不同Smn参数时各开关应放置的位置。 在实际测量之前,先用三个阻抗已知的标准器(例如一个短路、一个开路和一个匹配负载)供仪器进行一系列测量,称为校准测量。由实测结果与理想(无仪器误差时)应有的结果比对,可通过计算求出误差模型中的各误差因子并存入计算机中,以便对被测件的测量结果进行误差修正。在每一频率点上都按此进行校准和修正。测量步骤和计算都十分复杂,非人工
数据库原理_在线作业_2
数据库原理_在线作业_2 交卷时间:2018-01-16 10:33:08 一、单选题 1. (5分) 在数据管理技术的发展过程中,经历了人工管理阶段、文件系统阶段和数据库系统阶段。在这几个阶段中,数据独立性最高的是()阶段 ? A. 数据项管理 ? B. 人工管理 ? C. 文件系统 ? D. 数据库系统 纠错 得分: 5 知识点: 1.1 数据库系统概述 2. (5分) 使用CREATE INDEX语句建立的是() ? A. 视图 ? B. 表 ? C. 数据库 ? D. 索引 纠错 得分: 5 知识点: 3.3 数据定义 3.
描述数据库全体数据的全局逻辑结构和特性的是() ? A. 模式 ? B. 用户模式 ? C. 模式 ? D. 外模式 纠错 得分: 5 知识点: 1.3 数据库系统结构 4. (5分) 候选码的属性可以有() ? A. 1个 ? B. 多个 ? C. 1个或多个 ? D. 0个 纠错 得分: 5 知识点: 6.2 规化 5. (5分) 数据库设计的概念设计阶段,表示概念结构的常用方法和描述工具是()? A. 结构分析法和模块结构图 ? B. 数据流程分析法和数据流程图 ? C. 实体联系法和实体联系图 ? D. 层次分析法和层次结构图
得分: 5 知识点: 7.3 概念结构设计 6. (5分) 如果有两个事务,同时对数据库中同一数据进行操作,不会引起冲突的操作是()? A. 两个都是UPDATE ? B. 一个是DELETE,一个是SELECT ? C. 一个是SELECT,一个是DELETE ? D. 两个都是SELECT 纠错 得分: 5 知识点: 11.2 封锁 7. (5分) 在数据库系统中,死锁属于() ? A. 介质故障 ? B. 事务故障 ? C. 程序故障 ? D. 系统故障 纠错 得分: 5 知识点: 11.3 活锁与死锁 8. (5分) 下述()不是数据库管理员的职责
雷达原理复习
1、雷达的任务:测量目标的距离、方位、仰角、速度、形状、表面粗糙度、介电特性。 雷达是利用目标对电磁波的反射现象来发现目标并测定其位置。 当目标尺寸小于雷达分辨单元时,则可将其视为“点”目标,可对目标的距离和空间位置角度定位。目标不是一个点,可视为由多个散射点组成的,从而获得目标的尺寸和形状。采用不同的极化可以测定目标的对称性。 任一目标P所在的位置在球坐标系中可用三个目标确定:目标斜距R,方位角,仰角 在圆柱坐标系中表示为:水平距离D,方位角,高度H 目标斜距的测量:测距的精度和分辨力力与发射信号的带宽有关,脉冲越窄,性能越好。目标角位置的测量:天线尺寸增加,波束变窄,测角精度和角分辨力会提高。 相对速度的测量:观测时间越长,速度测量精度越高。 目标尺寸和形状:比较目标对不同极化波的散射场,就可以提供目标形状不对称性的量度。 2、雷达的基本组成:发射机、天线、接收机、信号处理机、终端设备 3、雷达的工作频率:220MHZ-35GHZ。L波段代表以22cm为中心,1-2GHZ;S波段代表10cm,2-4GHZ;C波段代表5cm,4-8GHZ;X波段代表3cm,8-12GHZ;Ku代表,12-18GHZ;Ka代表8mm,18-27GHZ。 第二章雷达发射机 1、雷达发射机的认为是为雷达系统提供一种满足特定要求的大功率发射信号,经过馈线和收发开关并由天线辐射到空间。 雷达发射机可分为脉冲调制发射机:单级振荡发射机、主振放大式发射机;连续波发射机。 2、单级振荡式发射机组成:大功率射频振荡器、脉冲调制器、电源 触发脉冲 脉冲调制器大功率射频振荡器收发开关 电源高压电源接收机 主要优点:结构简单,比较轻便,效率较高,成本低;缺点:频率稳定性差,难以产生复杂的波形,脉冲信号之间的相位不相等 3、主振放大式发射机:射频放大链、脉冲调制器、固态频率源、高压电源。射频放大链是发射机的核心,主要有前级放大器、中间射频功率放大器、输出射频功率放大器 射频输入前级放大器中间射频放大器输出射级放大器射频输出固态频率源脉冲调制器脉冲调制器 高压电源高压电源电源 脉冲调制器:软性开关调制器、刚性开关调制器、浮动板调制器 4、现代雷达对发射机的主要要求:发射全相参信号;具有很高的频域稳定度;能够产生复杂信号波形;适用于宽带的频率捷变雷达;全固态有源相控阵发射机 5、发射机的主要性能指标: 工作频率和瞬时带宽:雷达发射机的频率是按照雷达的用途确定的。瞬时带宽是指输出功率变化小于1bB的工作频带宽度。 输出功率:雷达发射机的输出功率直接影响雷达的威力范围以及抗干扰的能力。雷达发
数据库原理大作业
2012级网络工程专业《数据库原理》大作业 一、作业要求: 1.按照《数据库大作业小组分配名单》,选择各自的题目,要求每小组各自独 立完成。(不少于20页) 2.按照大作业评分标准和报告格式,给出完整的数据库设计过程; 3.数据库中的数据表不得少于三张,否则认为设计失败; 4.对每张数据表输入不少于10条的样本数据用于测试,样本数据要有代表性; 5.写出相应的SQL脚本,数据库可选用SQL Server或MySQL等; 6.提交结果时应包括电子版的报告和源代码,报告中说明各小组成员的分工; 7.如果还能在设计的基础,将应用系统开发出来,将根据开发的结果给以5-10 分的加分; 8.大作业检查时间:期末考试前一星期 9.作业参看模板格式,每步都有要求,每小组最后交一份作业。 二、评分标准 1.需求分析(数据流图、数据字典):20分 2.数据库设计。 2.1概念结构设计(E-R模型):20分 2.2逻辑结构设计(关系模式、函数依赖,码等)20分 2.3物理结构设计10分 3.数据库实现(定义表格和索引等,录入数据)10分 4.数据库运行(数据库操作的SQL语句,包括查询、增加、删除、修改)20分 三、选题 题目一:零件交易中心管理系统 零件交易中心管理系统主要提供顾客和供应商之间完成零件交易的功能,其中包括供应商信息、顾客信息以及零件信息。供应商信息包括供应商号、供应商名、地址、电话、简介;顾客信息包括顾客号、顾客名、地址、电话;零件信息包括零件号、零件名、重量、颜色、简介等。此系统可以让供应商增加、
删除和修改所提供的零件产品,还可以让顾客增加、删除和修改所需求的零件。交易员可以利用顾客提出的需求信息和供应商提出的供应信息来提出交易的建议,由供应商和顾客进行确认后即完成交易。 题目二药店管理系统 主要功能: 员工录入:录入药店全部员工的基本资料,指定记录人、验收人及营业员。资料包括:员工编号、姓名、年龄、性别、学历、职称、职位、身份证号、联系电话等。 药品入库登记:完成药品各项参数的入库登记工作。参数包括:货号、品名、类型、规格、单位、生产厂家、批准文号、注册商标、进货日期、有效期、无效期、供货商、生产批号、记录人、数量、批发价、进价、零售价等。 药品出库登记:将库房药品出库到柜台或者调拨对象等,可对当天或一定时间段内的出库单进行查询并打印出库单,由库房记录人和柜台领货人在出库单上共同签字确认。 药品进价查询:对在一定时间段之内某一药品的进价及其相应的供货商进行查询,为订购该药品提供价格依据。 库存药品查询: 供货商管理:将已停止使用的或错误的供货商名称从数据库中删除;可录入、查询及修改供货商的基本资料。 药品销售录入:统计某一营业员当日销售金额、统计全店当日销售金额、收款对帐功能。 药品销售查询:可对当天或一定时间段内的销售记录,按照全部、货号或品名(单一药品)、营业员、药品类型、进行查询,并统计销售数量、营业额和利润及利润率。可对查询结果打印,并可按每种药品的销售金额或销售数量和销售进价从大到小进行排序。 药品入柜记录:可按照全部、货号、助记符、记录人分别查询在当天或一定时间段内的药品入柜记录。 柜台药品查询:可分别以全部柜存、货号、结款状态、品名(单一药品)、柜台
数字正交 雷达原理大作业
数字正交采样及实现 姓名:杨宁 学号:14020181051 专业:电子信息工程 学院:电子工程学院
一. 基本原理 带通信号: 以 采样,可得: 也就是说: (1)可直接由采样值交替得到信号的同相分量I (n )的偶数项和正交分量 Q (n )的奇数项,不过在符号上需要进行修正 (2)I、Q两路输出信号在时间上相差一个采样周期 。在信号处理中,要求得到的是同一时刻的I 和Q 之值,所以需要对其进行时域的插值或进行频域的滤波,二者是等效的。 ()()()()()000cos cos sin I Q x t a t t t x t t x t t ωφωω=+=-????041,2;B M 21s s s s s f f f f B t f M ?? =>= ?-? ? 其中为信号带宽,为整数,
二.实现方式 实现框图如图一。 图一数字正交采样系统实现框图 实现方法主要有3种,分别是:低通滤波法、Bessel插值法、多相滤波法。 2.1、低通滤波法 图二低通滤波法框图
将A/D采样放在混频之前,采用数字混频与低通滤波,提高了精度与稳定性。 以fs=4 f0/3=2 fs2=4 fs1 , f0=3 fs1 为例,采样后信号的频谱、数字混频后的信号频谱、输出信号的频谱分别如图三(a)、(b)、(c)。 图三(a) 图三(b) 图三(c) 这种做法的优点是:对双路信号同时作变换,所用的滤波器系数一这样两路信号通过低通滤波器时由于非理想滤波所引起的失真是一致的,对I、Q双路信号的幅度一致性和相位正交性没有影响,从而具有很好的负频谱对消功能,可以
(完整版)雷达系统导论第3-4章作业答案
雷达系统导论作业 [1] 3.1沿圆轨道绕地球飞行的卫星高度为5000海里,速度为2.7海里/秒。(a )如果UHF (450MHz )雷达位于轨道平面内,当卫星 刚出现在地平线上时观察到的多普勒频移是多少(地球半径为3440海里,忽略大气折射和地面反射的影响)?(b)当卫星处于天顶时多普勒频移是多少? 解答:(a )当卫星刚出现在地平线上时 径向速度为 )(1.15000 344034407.2cos 节=+?=+?==h R R v v v r α (注:1节=1海里/小时,1海里=1.852公里) 故多普勒频移)(7.1)45.01.143.343.32)(Hz GHz f v v Hz f t r r d =??===((节)λ (b)当卫星处于天顶时径向速度为)(7.2节=r v 故多普勒频移)(17.4)45.07.243.343.3)(Hz GHz f v Hz f t r d =??==((节) [2] 3.2. 220MHz VHF 雷达的最大非模糊距离为180海里。(a )第一盲速(单位为节)是多少?(b) 重复习题(a ),但雷达工作在1250MHz 的L 波段。(c) 重复习题(a ),但雷达工作在9375MHz 的X 波段。(d)为了获得与(a )中的VHF 雷达一样的盲速,(c) 中X 波段雷达的非模糊距离(海里)为多少?(e)如果需要第一盲速为(a )中盲速的雷达,你愿意选择VHF 雷达还是X 波段雷达?请解释你的回答(有可能没有唯一解)。 解答:(a )Hz R c f c R T un p un p 450010852.11802103223 8 =????==?=, (节)5950450010 22010397.097.0)()(97.0)(68 1=????=??==p p f f c Hz f m kt v λ (b )Hz f p 4500=,(节)1047450010 125010397.0)()(97.068 1=????==Hz f m v p λ (c )Hz f p 4500=,(节)140450010937510397.0)()(97.06 8 1=????==Hz f m v p λ (d )海里)公里(8.1)(33.34500 21032228 ==??===?=p p un un p f c cT R c R T (e )如果需要第一盲速为(节)5950)()(97.01==Hz f m v p λ,从上面的计算可以 看出,随着雷达工作频率的升高(波长的减小),要求p f 升高,则最大非模糊距
雷达原理
一、绪论 雷达:无线电探测与测距。利用电磁波对目标检测、定位、跟踪、成像和识别。 雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。 组成框图 雷达测量原理 雷达发射信号: 雷达接收信号: 雷达利用收发信号之间的相关性获取目标信息 雷达组成: 天线:向确定的方向发射和接收特定频段的电磁波 收发开关: 发射状态将发射机输出功率接到天线,保护接收机输入端 接收状态将天线接收信号接到接收机,防止发射机旁路信号 发射机:在特定的时间、以特定的频率和相位产生大功率电磁波 接收机:放大微弱的回波信号,解调目标信息 雷达的工作频率: 工作频率范围:22mhz--35ghz 扩展范围:2mhz--94ghz 绝大部分雷达工作在:200mhz--10000ghz 雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围 分辨力:区分点目标在位置上靠近的能力 距离分辨力:同一方向上两个目标之间最小可区别的距离 角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度 数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一个目标数据的次数。 跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度 发射功率的和调制波形: 发射功率的大小直接影响雷达的作用距离
发射信号的调制波形: 早期简单脉冲波形,近代采用复杂波形 脉冲宽度:脉冲雷达发射信号所占的时间。影响探测能力和距离分辨力 重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。决定单值测距的范围,影响不模糊速区域大小 天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示 天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。机械性扫描和电扫描 接收机的灵敏度:通常规定在保证50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收机的最小可检测信号功率。这个功率越小接收机的灵敏度越高,雷达的作用距离越远。 显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。 电子战对抗中的雷达: 电子战(EW ):敌我双方利用无线电电子装备或器材所进行的电磁信息斗争,包括电子对抗和电子反对抗。 电子对抗(ECM ):为了探测敌方无线电电子装备的电磁信息(电磁侦察),削弱或破坏其使用效能所采取的一切战术、技术措施(电子干扰、伪装、隐身和摧毁) 电子反对抗(ECCM ):在敌方实施电子对抗的条件下,保证我方有效采用电磁信息所采取的一切战术、技术措施(反侦察、抗干扰、反伪装、反隐身、反摧毁) 雷达反干扰 天线抗干扰:低旁瓣、旁瓣对消、波束控制、随机扫描 发射机抗干扰:提高有效辐射功率、频率捷变、频率编码、频率分集、脉冲压缩、波形隐蔽、窄脉冲、重频时变 接收机、信号处理机抗干扰:接收机抗饱和、重频、脉宽鉴别、MTI 、MTD 、积累检测 二、发射机 发射机任务:产生大功率高频振荡发射信号。脉冲雷达要求发射机产生一定宽度、一定重复频率、一定波形的大功率射频脉冲列 基本类型:连续波发射机、脉冲调制发射机(单极振荡式发射机、主振荡式发射机) 输出功率:发射机送到天线输入端的功率 峰值功率:脉冲期间发射机输出功率的平均值(不要过分增大法设计的峰值功率) 平均功率:脉冲重复周期内输出功率的平均值: 工作比D: 常规脉冲雷达工作比0.001 脉冲多普勒雷达工作比10-2 ~10-1量级 连续波雷达工作比100% 总功率:发射机输出功率与输入功率之比 主振放大式发射机特别注意改善输出级效率 信号形式: 信号形式由雷达体制决定 常规脉冲雷达为简单脉冲波形,特殊体制雷达为复杂调制波形 t r av P T P τ=r r T F D ττ= =
电子测量大作业
电子测量大作业 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
电子测量大作业 实验名称:一种基于DDFS的正弦信号源班级: 姓名: 学号:
题目: 5-11在multisim环境下,参考图5-3-1,设计一种基于DDFS的正弦信号源,给出原理图和仿真实验结果。 原理:DDFS-Direct Digital Frequency Synthesizer 直接数字频率合成。在时钟脉冲的控制下,相位累加器输出线性递增的相位吗,相位吗作为地址信息来寻址波形寄存器,讲波形寄存器中存放的正弦波形样点数据输出,然后经过模数变换器得到对应的阶梯波形,最后经过低通滤波器对解题波进行平滑,得到正弦波形。波形储存器中也可以存放其他波形,实现任意波形产生的功能。频率控制字K在时钟的控制下控制每次相位累加器累计的相位增量,从而实现对输出信号频率的控制。 实验思路:由于不知道是否有可记忆是的芯片,故使用简单的数电所学的芯片进行仿真,首先产生三角波,再通过对波形进行减法运算产生书中波形存储器输出的波形,然后使用低通滤波器滤去高频分量,留下来的便是正弦波。 具体的电路图: (1)进行步长为1,范围为0~10的加减法电路图
如图所示,74283用来进行加法运算,下面的两个74161用来控制频率控制字K的大小,加减计数范围为0~10,当第一个计数器计数到10以后,由逻辑关系,把第一个计数器清零,同时第二个74161计数一次,当第二个74161的低位输出为零的时候,控制74283加法,当输出为1的时候控制74283进行减法运算,实现了从74273输出的数字从0递增到10,再递减到0的过程(输出的正弦频率为时钟信号的20分之一) (2)数模转换部分: (3)把数字信号通过数模转换转换成模拟信号,即产生了三角波 仿真结果图如下所示: 但是此时的三角波是含有直流分量的,需要通过运放进行减法运算 (4)去除直流分量 使用运算放大器去除其直流分量
数据库原理作业
数据库原理作业 客观题预算成绩:100 分 题号:1 题型:单选题(请在以下几个选项中选择唯一正确答案) 在关系数据库设计中,设计关系模式是( )的任务 A、A)需求分析阶段 B、B)概念设计阶段 C、C)逻辑设计阶段 D、D)物理设计阶段 学员答案:C 正确性:正确 题号:2 题型:单选题(请在以下几个选项中选择唯一正确答案) 存取方法设计是数据库设计的( )阶段的任务。 A、一个1:1联系可以转换为一个独立的关系模式,也可以与联系的任意一端实体所对应的关系模式合并 B、一个1:n联系可以转换为一个独立的关系模式,也可以与联系的n端实体所对应的关系模式合并 C、一个m:n联系可以转换为一个独立的关系模式,也可以与联系的任意一端实体所对应的关系模式合并 D、三个或三个以上的实体间的多元联系转换为一个关系模式 学员答案:C 正确性:正确 题号:3 题型:单选题(请在以下几个选项中选择唯一正确答案) 数据流图属于数据库设计的哪个阶段的工具?( ) A、需求分析阶段 B、概念结构设计阶段 C、逻辑结构设计阶段 D、物理结构设计阶段 学员答案:A 正确性:正确 题号:4 题型:单选题(请在以下几个选项中选择唯一正确答案) 在数据库设计中,将ER图转换成关系数据模型的过程属于( )。 A、需求分析阶段 B、逻辑设计阶段 C、概念设计阶段 D、物理设计阶段 学员答案:B
题号:5 题型:单选题(请在以下几个选项中选择唯一正确答案) 在数据库设计的需求分析阶段,描述数据与处理之间关系的方法是() A、ER图 B、业务流程图 C、数据流图 D、程序框图 学员答案:C 正确性:正确 题号:6 题型:单选题(请在以下几个选项中选择唯一正确答案) 建立索引属于数据库的() A、概念设计 B、逻辑设计 C、物理设计 D、实现与维护设计 学员答案:C 正确性:正确 题号:7 题型:单选题(请在以下几个选项中选择唯一正确答案) 在关系数据库设计中,设计关系模式是____的任务。 A、需求分析阶段 B、概念设计阶段 C、逻辑设计阶段 D、物理设计阶段 学员答案:C 正确性:正确 题号:8 题型:单选题(请在以下几个选项中选择唯一正确答案) 从E-R模型向关系模式转换时,一个m:n联系转换为关系模式时,该关系模式的码是 A、A)m端实体的码 B、B)n端实体的码 C、C)m端实体码与n端实体码的组合 D、D)重新选取其他属性 学员答案:C 正确性:正确 题号:9 题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以
雷达系统大作业题目
雷达系统大作业 一汉译英 1.线性调频信号 2.二相编码信号 3.侦察和监视雷达 4.杂波抑制 5.恒虚警检测 6.合成孔径雷达 7.干涉合成孔径雷达 8.匹配滤波 9.脉冲压缩 10.多普勒滤波器组 二英译汉 1.RCS 2.DPCA 3.GMTI 4.GMTD 5.Discrete Fourier Transform 6. in-phase and quadrature components 7.PRF
8. Doppler frequency of ground return 9.Pulse compression 10. Detection probability and the false-alarm probability 三12选3 1 The velocity of the airborne radar is 100m/s, the beamwidth of the radar is 3 deg.(constant for different look direction), the wavelength of the transmitted signal is 0.03m, compute the clutter Doppler bandwidth of the main beam for the following look direction: (a) 0 deg(relative to the velocity direction);(b) 30 deg(relative to the velocity direction);(c) 60 deg(relative to the velocity direction); If the radar antenna is a phased-array antenna, and the broadside of the antenna is parallel to the velocity direction, then compute the clutter Doppler bandwidth of the main beam for the following look direction(Assume that the beamwidth of the phased-array at 0 deg is 3 deg ): (a) 0 deg(relative to the velocity direction);(b) 30 deg(relative to the velocity direction);(c) 60 deg(relative to the velocity direction). 2 The moon as a radar target may be describe as followings: average
电子测量作业
第一章 1.12 数字电压表测量,且R 1、R 2都在30 K 可忽略电压表接入对输出电压的影响,则有: 1 11R U E R r = + 222R U E R r =+ 所以:12121221 () R R U U RU R U -r = - 1.13 用题1.l0所示的测量电路,现分别用MF -20晶体管电压表的6 V 档和30V 档测量负载 R L 上电阻U o ,已知电压表的电压灵敏度为20k Ω/V(由此司算出各档量程电压表输入电阻R v =电压灵敏度×量程),准确度等级为2.5级(准确度等级s 表示仪表的满度相对误差不超 过s %,即最大绝对误差为Δx m =±s%·x m 。试分别计算两个量程下的绝对误差和相对误差。 解:6V 档时: Rv 1=120K Ω R 外1=30//120=24 K Ω 124 5 2.22230x U V ?= =+24 Δx 11=Ux 1-A =2.222-2.5=-0.278V Δx 12=±2.5%×6=±0.15V 111120.482x x x V ???=+= 110.428 2.5 x y A ???= 100%=100%=17%
30V 档时: Rv 2=30×20=600K Ω R 外2=30 //600=28.57 K Ω 228.57 5 2.24430x U V ?= =+28.57 Δx 21==2.244-2.5=-0.06V Δx 22=±2.5%×30=±0.75V Δx 2=0.81V 20.86 2.5 y ?= 100%=32.4% 第二章 2.10 现校准一个量程为100 mV ,表盘为100等分刻度的毫伏表,测得数据如下: 求:① 将各校准点的绝对误差ΔU 和修正值c 填在表格中; ② 10 mV 刻度点上的示值相对误差r x 和实际相对误差r A ; ③ 确定仪表的准确度等级; ④ 确定仪表的灵敏度。 解:② r x =0.1/10×100%=1% r A =0.1/9.9×100%=1.01% ③ 因为:Δx m =-0.4 mV r m =-0.4/100=-0.4%
雷达大作业
雷达原理 实验名称:脉冲压缩技术在雷达信号处理中的应用学院:电子工程学院 专业:信息对抗技术 班级:021231 姓名: 学号:
脉冲压缩技术在雷达信号 处理中的应用 引言: 雷达是通过对回波信号进行接收再作一些检测处理来识别复杂回波中的有用信息的。其中,波形设计有着相当重要的作用,它直接影响到雷达发射机形式的选择,信号处理方式,雷达的作用距离及抗干扰,抗截获等很多重要问题。现代雷达中广泛采用了脉冲压缩技术。脉冲压缩雷达常用的信号有线性调频信号和二相脉内编码信号。脉冲压缩雷达具有高的辐射能量和高的距离分辨力,这种雷达具有很强的抗噪声干扰和欺骗干扰的性能。因此,脉冲压缩技术在雷达信号处理中广泛应用。 一、脉冲压缩技术原理 雷达是Radar(Radio Detection And Ranging)的音译词,意为“无线电探测和测距”,即利用无线方法来发现目标并测定目标在空间的位置,这也是雷达设备在最初阶段的功能。典型的雷达系统主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。 随着雷达应用的不断扩大,对雷达的作用距离,分辨精度等的要
求相应提高。增大雷达作用距离ΔR=cτ/2可以提高其脉宽或峰值功率,但由于发射管的限制,增大功率往往不容易,于是可以用增大脉冲宽度的方法。对于恒定载频单脉冲信号,脉宽的增大意味着带宽的减小,B=1/μτ。根据距离分辨率的表达式,ΔR=cτ/2。 测距精度和距离分辨力对信号形式的要求是一致的,主要取决于信号的频率结构,为了提高测距精度和距离分辨力,要求信号具有大的带宽。而测速精度和速度分辨力则取决于信号的时域结构,为了提高测速精度和速度分辨力,要求信号具有大的时宽。除此之外,为提高雷达系统的发现能力,要求信号具有大的能量。由此可见,为了提高雷达系统的发现能力、测量精度和分辨能力,要求雷达信号具有大的时宽、带宽、能量乘积。但是,在系统的发射和馈电设备峰值功率受限制的情况下,大的信号能量只能靠加大信号的时宽来得到。测距精度和距离分辨力同测速精度和速度分辨力以及作用距离之间存在着不可调和的矛盾。于是在匹配滤波器理论指导下,人们提出了脉冲压缩的概念。 窄脉冲具有宽频谱带宽。如果对宽脉冲进行频率或相位调制,那么它就可以具有和窄脉冲相同的带宽。假设调制后的脉冲带宽增加了B,由接收机的匹配滤波器压缩后,带宽将等于1/B,这个过程叫脉冲压缩。脉冲压缩雷达不需要高能量窄脉冲所需要的高峰值功率,就可同时实现宽脉冲的能量和窄脉冲的分辨力。脉冲压缩比定义为宽脉冲宽度τ与压缩后脉冲宽度的之比。带宽B与压缩后的脉冲宽度的关系为1/B。这使得脉冲压缩比近似为Bτ。即压缩比等于信号的时宽-
电子测量技术大作业
电子测量技术大作业 目录 题目一测量数据误差处理 (1) (1)提供测试数据输入、粗大误差判别准则选择等的人机界面; (1) (2)编写程序使用说明; (1) (3)通过实例来验证程序的正确性。 (1) 题目二时域反射计 (1) (1)时域反射计简介 (1) (2)时域反射计原理 (2) (3)时域反射计(TDR)组成 (2) (4)仿真与结果 (2) 附录 (2)
题目一测量数据误差处理 2-21 参考例2-2-6的解题过程,用C语言或Matlab设计测量数据误差处理的通用程序,要求如下: (1)提供测试数据输入、粗大误差判别准则选择等的人机界面; 图 1 测试数据误差处理的输入 (2)编写程序使用说明; 本题用的是C语言编写的数据误差处理的通用程序,调试编译借助了CodeBlocks软件。运行exe文件后,只需输入所需测试数据的数目、各数值大小并选择误差处理方式与置信概率即可得出处理结果。在程序的子函数中已经将t a值表、肖维纳准则表及格拉布斯准则表的所有数据存入,无需人工查表填入。其他具体程序内容可见附录。 图 2 程序运行流程图 (3)通过实例来验证程序的正确性。 例2-2-6中的原始数据如下表1 计算所得结果与图3显示结果近似相等,说明程序编译无误。 图 3 数据处理后的结果显示 题目二时域反射计 6-14 在Multisim环境下,基于Tektronix TDS204虚拟示波器设计一种时域反射计,给出电路原理图和实验仿真结果。(本题设计以时域反射计测量阻抗为例) (1)时域反射计简介 时域反射计(TDR)用来测量信号在通过某类传输环境传导时引起的反射,如电路板轨迹、电缆、连接器等等。TDR仪器通过介质发送一个脉冲,把来自“未知”传输环境的反射与标准阻抗生成的反射进行比较。TDR 显示了在