火车轮结构基础知识
火车轮结构基础知识 Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】
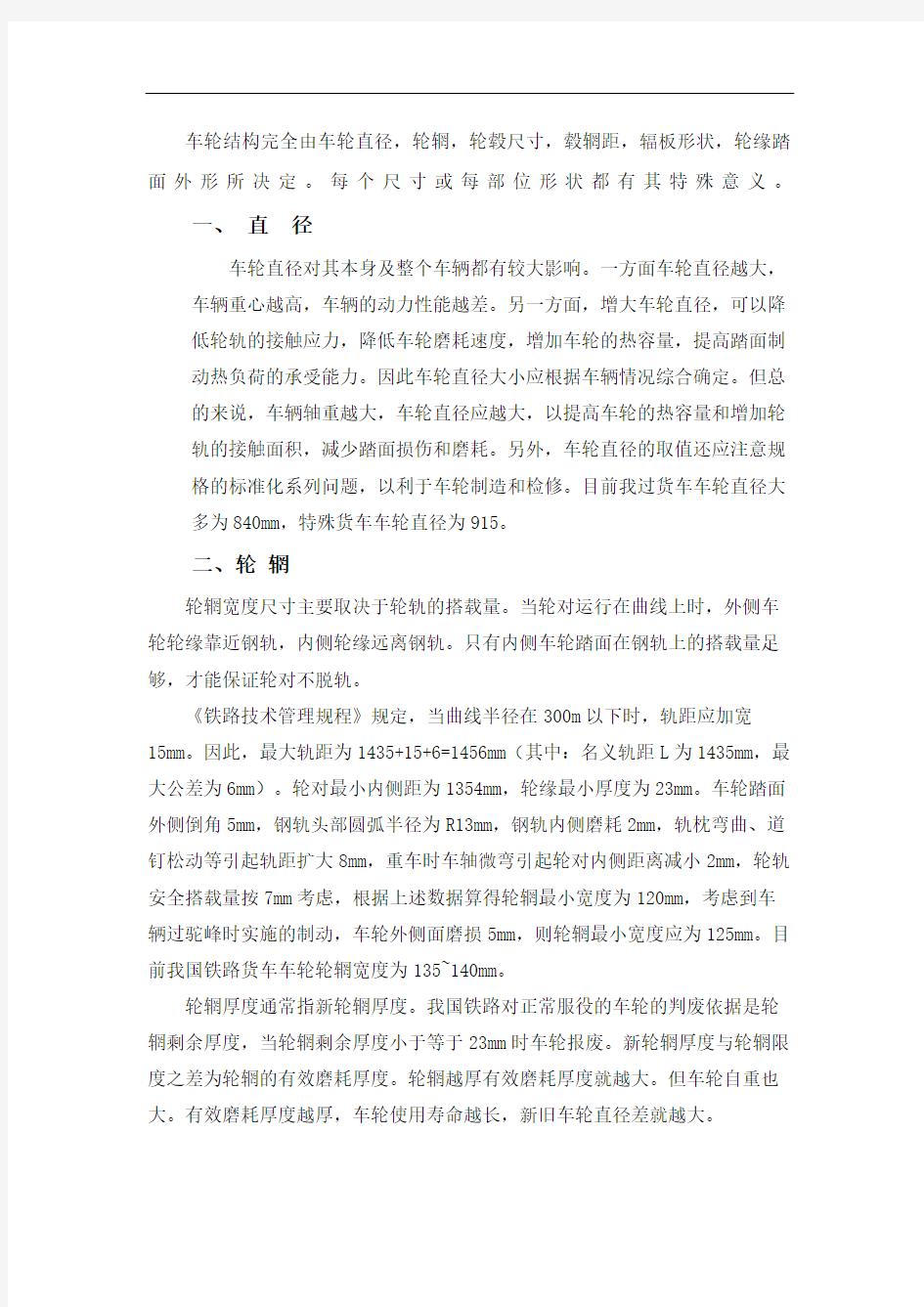
车轮结构完全由车轮直径,轮辋,轮毂尺寸,毂辋距,辐板形状,轮缘踏面外形所决定。每个尺寸或每部位形状都有其特殊意义。
一、直径
车轮直径对其本身及整个车辆都有较大影响。一方面车轮直径越大,车辆重心越高,车辆的动力性能越差。另一方面,增大车轮直径,可以降低轮轨的接触应力,降低车轮磨耗速度,增加车轮的热容量,提高踏面制动热负荷的承受能力。因此车轮直径大小应根据车辆情况综合确定。但总的来说,车辆轴重越大,车轮直径应越大,以提高车轮的热容量和增加轮轨的接触面积,减少踏面损伤和磨耗。另外,车轮直径的取值还应注意规格的标准化系列问题,以利于车轮制造和检修。目前我过货车车轮直径大多为840mm,特殊货车车轮直径为915。
二、轮辋
轮辋宽度尺寸主要取决于轮轨的搭载量。当轮对运行在曲线上时,外侧车轮轮缘靠近钢轨,内侧轮缘远离钢轨。只有内侧车轮踏面在钢轨上的搭载量足够,才能保证轮对不脱轨。
《铁路技术管理规程》规定,当曲线半径在300m以下时,轨距应加宽
15mm。因此,最大轨距为1435+15+6=1456mm(其中:名义轨距L为1435mm,最大公差为6mm)。轮对最小内侧距为1354mm,轮缘最小厚度为23mm。车轮踏面外侧倒角5mm,钢轨头部圆弧半径为R13mm,钢轨内侧磨耗2mm,轨枕弯曲、道钉松动等引起轨距扩大8mm,重车时车轴微弯引起轮对内侧距离减小2mm,轮轨安全搭载量按7mm考虑,根据上述数据算得轮辋最小宽度为120mm,考虑到车辆过驼峰时实施的制动,车轮外侧面磨损5mm,则轮辋最小宽度应为125mm。目前我国铁路货车车轮轮辋宽度为135~140mm。
轮辋厚度通常指新轮辋厚度。我国铁路对正常服役的车轮的判废依据是轮辋剩余厚度,当轮辋剩余厚度小于等于23mm时车轮报废。新轮辋厚度与轮辋限度之差为轮辋的有效磨耗厚度。轮辋越厚有效磨耗厚度就越大。但车轮自重也大。有效磨耗厚度越厚,车轮使用寿命越长,新旧车轮直径差就越大。
车辆检修时,为了满足车辆之间悬挂的要求,经常需要在心盘、旁承等位置增加调平板。如果新旧车轮直径差过大,所增加的垫板相应加厚。这样心盘螺栓就容易折断,同时也增加了检修的工作量。
轮辋质量占车轮质量较大的比例,即轮辋的质量在很大程度上决定了车轮的质量。特别是铸钢车轮,由于浇铸工艺原因,轮辋质量越大,就要求辐板越厚,车轮质量将更大。车轮为簧下质量,其质量的增加对轮轨垂向动作用力有较大影响。
为了提高轮辋硬度以提高其使用寿命,成产中车轮踏面进行淬火处理。由于淬火工艺特性,淬硬深度受到限制。轮辋越厚,内部硬度越低,耐磨性能越来越差。虽然车轮使用寿命随着轮辋厚度的增加而延长,但延长的比例越来越小。
从车轮的使用寿命的角度来考虑轮辋应越厚越好。但从车轮重量和新旧车轮直径差的角度轮辋厚度应越小越好。轮辋厚度尺寸大小各有利弊,应根据车辆具体使用条件及上述各种影响因素综合确定。
目前国内货车车轮轮辋厚度有50mm和65mm两种。
三、轮毂
车轮和车轴靠过盈配合组装在一起,轮毂的主要作用是将车轮牢牢地固定到车轴上,其尺寸主要由轮轴配合所需要的紧固力所决定。我国车辆车轮轮毂长度名义尺寸均为178mm。轮毂厚度随轴重的不同而变化。在轮毂长度尺寸和轮轴间配合过盈量一定的情况下,轮毂厚度越厚,车轮质量越大,轮轴之间的紧固力也越大。合理的轮毂厚度应该是:在满足轮轴紧固力要求的前提下厚度尽可能地小,以减轻车轮质量。
四、毂辋距
毂辋距指轮辋内侧面与轮毂内侧面间的轴向距离,该值与轮对内侧距、车轴两轮座之间的距离有关,因此在选取毂辋距时不能仅从车轮的角度考虑,应根据轮对内侧距与车轴协调考虑。目前国内货车车轮该值为
68mm。
五、辐板形状
辐板的强度直接关系到行车的安全,因此车轮辐板应有足够的强度。辐板形状对车轮的结构强度和刚度有较大的影响。较小的径向刚度可使车轮具有较大的弹性,可以改善制动热负荷作用下车轮的应力状态和降低轮轨动力作用力,因此辐板的径向刚度应适量地小。辐板的轴向刚度应尽量的大,否则车轮将产生较大的轴向变形。轴向变形过大会改变轮轨正常接触位置和轮缘角度,影响车辆运行性能,增加爬轨的可能性。一个好的辐板形状,可以在不增加自重的条件下大幅度地提高车轮的结构刚度,改善车轮的刚度,因此辐板是车轮结构设计和优化的重点部位。
国内外普遍采用的辐板形状有:直辐板、S辐板、波浪形辐板、盆型辐板。
直辐板与其他各形状辐板相比,优点是质量小,缺点是径向刚度过大,轴向刚度较小。不是一个好的辐板形状。但尽管如此,在轮盘制动的情况下必须采用直辐板,以便安装制动盘。
S型和盆型辐板可使得车轮具有合理的刚度和较低的热应力。将辐板设计成S形或盆形的主要目的是为了降低热应力。踏面制动一般采用这两种辐板形状。但由于S形辐板不利于钢水的流动,因此不适合铸钢车轮,铸钢车轮大多采用盆形辐板。
波浪形辐板与S形辐板在结构上的区别主要是辐板的偏心量(靠近轮辋处辐板的中心线与靠近轮毂处的辐板中心线之间的轴向距离)不同,造成这种差别的原因主要是车轮的毂辋距不同。波浪形辐板车轮径向刚度较小,与S形相比波浪形辐板车轮轴向刚度和应力较大。
辐板形状即可用优选法设计也可用优化法设计,不管用什么方法,良好的辐板性能是唯一的目标。另外在车轮辐板设计时,要校核辐板是否与车辆下部界限发生干涉。
六、轮缘踏面外形
轮缘踏面外形设计时应考虑与轨头外形的配合,理想的轮轨型面配合状态能有效地降低接触应力和磨耗,有助于改善列车通过曲线性能,有效地提高列车失稳的临界速度。同时设计的新踏面应尽量与磨
耗后的形状接近,以降低修正踏面时金属切削量。轮缘踏面外形的设
计原则是:
(1)如果轮缘踏面与钢轨发生两点接触,那么必然要有一个点发生滑动,滑动的点将发生严重磨耗,因此应尽量避免轮缘踏面与钢轨
发生两点接触。此外,轮对处于任何位置时,轮轨接触点处的车轮和
钢轨横向界面曲率半径差不要过大,以增大轮轨之间的接触面,减小
接触应力,从而降低轮轨磨耗量和轮轨疲劳损坏。
(2)保证轮对在直线轨道上运行时有较高的临界速度,这就要求轮对在横移量不大时,车轮踏面接触点处的等效斜率小,即左右轮接
触点处的半径差小,这样轮对在直线上运行时不易发生蛇行运动。
(3)曲线通过性能好,即轮对在曲线上运行时,轮对和轨道之间应保持较小的冲角,这就要求轮对在横移量较大时车轮踏面接触点处
的等效斜率要大,即左右接触点的处的半径差要大,这样有利于轮对
位置复原,从而可以减轻轮缘磨耗、轨道侧磨和轮对对曲线的冲击。
(4)在运用中,由于磨耗、剥离、擦伤等原因,轮缘踏面需要经常旋修,如果磨耗后的形状与轮缘踏面初始差别较大,那么旋修时旋
掉的金属量就多,这样会降低车轮的使用寿命,因此在进行轮缘踏面
设计时,既要考虑上述各种性能因素也要考虑经济因素。
轮缘需有一定高度,过低易发生脱轨;若轮缘设计的过高,当踏面磨耗深度较大时轮缘顶部可能触碰钢轨鱼尾板螺栓和鱼尾板肩部。轮缘高度一般在
26~30mm之间。考虑通过道岔安全,车轮轮径越小,轮缘应越高。轮缘有防止车轮脱线的功能,为防止低速车轮爬轨和高速车轮跳轨,轮缘外侧面与水平面之间有足够的轮缘角,一般在70°左右,过小容易爬轨,不能保证安全;过大使修复外形时切削量增加,且当轮对有冲角时轮缘顶部易与钢轨发生接触。
轮缘踏面形状主要取决于线路情况和列车运行速度,而与车轮本身的结构无关。当运行的路线和列车的速度没有较大变化时,即使车轮结构发生了变化,其踏面形状也无需改变。通常情况下踏面采用标准形状。车轮设计计算标准中一般不包括轮缘踏面外形设计计算。
目前国内货车只有一种轮缘踏面形式,即LM型,见图。
交通运输论文-MVB总线在地铁列车控制系统中的应用
交通运输论文-MVB总线在地铁列车控制系统中的应用 摘要:介绍了 MVB 总线的物理层、帧和报文的格式与时序, 以及其在广州地铁2 号线、深圳地铁 1 号 线、上海地铁1 号线延长线等车辆控制系统中的成功应用。 关键词:地铁列车; 多功能车辆总线( MVB) ; 帧; 报文; 自动控制 地铁 2 号线、深圳地铁 1 号线、上海地铁 1 号线延长线的列车均采用了符合 IEC61375 TCN 标准的德国总线控制系统。该系统由列车总线( WTB) 和多功能车辆总线( MVB) 两部分组成, 单元( 整个列车 6 辆车为一个编组, 3 辆车为 1 个单元) 内用 MVB 总线连接, 两个单元间用 WTB 总线连接, MVB 总线实现车辆控制, WTB 总线实现列车控制。 1 MVB 总线的物理层和链路层 MVB 总线模型是在开放系统互联 OSI 模型的基础上进行了简化。OSI 具有 7 层参考模型, 而 MVB 只有其中的物理层和链路层。 1.1 物理层 MVB 总线的物理层有 3 种: 1) ESD( 电的短距离传输介质) , 使用双绞屏蔽线, 按RS- 485 标准, 最多支持 32 个设备, 最大总线长度 20 m 。 2) EMD( 电的中距离传输介质) , 使用双绞屏蔽线, 最多支持 32 个设备, 最大总线长度 200 m 。允许使用变压器连接。 3) OGF( 光纤媒介) , 使用总线连接器, 传输距离可达2 km。
MVB 总线系统是分级控制系统。系统设备共分 5 个级别, 6 种能力: 1) 1 级设备具有的能力有设备状态和过程数据。设备端口地址一般与设备地址一致。 2) 2 级设备具有的能力有设备状态, 过程数据, 信息数据, 是智能设备可以通过总线配置, 但不能编程。 3) 3 级设备具有的能力有设备状态, 过程数据, 信息数据和用户编程。 4) 4 级设备具有的能力有设备状态、过程数据、信息数据和总线管理器。用户编程具有可选性。 5) 5 级设备具有的能力有设备状态、过程数据、信息数据、网关和总线管理器。具有总线管理器的网关能与各种总线同步。 1.2 链路层数据 1.2.1 帧和报文格式 有效的帧格式见图 1。 1) 主帧格式: 以主起动定界符开始, 接着是 16 位报文数据, 然后是 8 位校验序列。4 位 F_code 码限制下面的12 位并指示从帧大小, 如图 2 所示。 2) 从帧格式: 以从起动定界符开始, 接着是 16, 32,64, 128 或 256 位帧数据, 8 位校验序列在 64 位数据的每个字后或在 16, 32 位数据后。帧文每64 位后就有一个校验序列, 如图 3 所示。
龙门吊轨道基础验算
附件:龙门吊基础验算 一、门吊钢跨梁强度验算 1.概述 龙门吊过跨梁采用上下铺设40mm厚盖板和30mm厚腹板组焊而成箱形结构梁,中间间隔1.5m均匀布置16mm厚隔板,整体高度455mm。所用材料主要采用Q345B高强钢,结构形式见图(一) 图一龙门吊钢跨梁结构形式图 2.计算载荷工况: 2.1计算载荷:钢板组合梁上只运行16T门吊,45T门吊则不再钢梁上运行,16T 门吊自重70吨,吊重16吨,走行轮数4,单个轮压G=(70/2+16)/2=25.5T,垂向动荷系数取1.4,单个轮压为G*1.4=35.7T。(门吊轮距7.5m) 2.2载荷工况: 工况1,门吊运行到一轮压地基面端部,一轮压过跨梁上。 工况2,门吊运行到过跨梁中部时工况。 2.2材料的许用应力: 3.有限元建模
过跨梁钢结构有限元模型见图(二)。由于为左右对称结构,采用实体单元进行网格的自动划分。该模型共划分了54768 个单元, 43581个节点。 图二过跨梁钢结构有限元模型 4 结论: 工况1:过跨梁最大应力为109.98 MPa(见图三)、最大静挠度为15.6mm (见图四),挠跨比为14.66/21000=1/1432<1/500; 工况2:过跨梁最大应力为168.26 MPa(见图五)、最大静挠度为36.2mm (见图六),挠跨比为34/21000=1/617<1/500; 在载荷工况下,最大应力均小于材料的许用应力,刚度小于钢结构设计规范挠跨比1/500,过跨梁最大强度和刚度均满足使用要求。 图三过跨梁工况1应力云图
图四过跨梁工况1应变云图 图五过跨梁工况2应力云图 图六过跨梁工况2应变云图 二、门吊扩大基础承载力计算 龙门吊轨道梁基础为500mm*600mm,扩大基础图如图七所示,梁上预埋螺栓,铺设43#钢轨,轨道之间预留5mm收缩缝、接地线,轨道末端做挡轨器。
5列车控制系统
哈尔滨地铁车辆系统培训 (列车控制系统) 二○一○年三月一日
功能: 监视、控制车辆和车辆各系统的运行,同时可诊断各系统的运行情况,并给出报警信息。 配置: 列车控制系统采用继电逻辑控制或分布式总线控制方式,采用继电逻辑控制时要配备单独的信息和诊 断系统,为车辆各系统提供运行状态检测、故障诊断和保护。 目前,新造列车均采用了分布式总线控制方式。列车总线系统采用国际列车通信网络TCN标准( IEC61375-1的最新版本)。所采用的总线控制系统成熟、安全可靠。 广州地铁一号线车辆采用有接点逻辑控制电路,二号线列车采用了当今世界上最先进的列车控制技术 ,总线控制技术。从牵引制动控制到车门开关,从PIS自动报站到汽笛报警等几乎列车的所有方面,整列车各系统的监视、控制和诊断都通过贯穿全车的总线控制网络实现,总线系统使整列车成为一个有机的整体。司机对整个列车的控制命令通过列车通信网路送到列车的各个车厢上,列车的各个车厢工作状态通过列车通信网路送到司机显示台上,让整个列车有效而安全的工作。 总线技术的应用大幅度减少了金属导线的使用,减少了电气机械连接点,避免了一般接点逻辑电路由 于单个物理故障导致的错误动作;总线上的故障设备可以得到有效隔离并退出网络,而保持其它不需要其控制信息的设备仍能有效运作。总线技术带来了许多优点和先进功能,但也带来了新的问题和新的障碍,如对总线的物理介质的要求较高,要求有较好的电磁环境,甚至由于电磁环境、总线线路质量不稳定或软件缺陷等问题导致整体的瘫痪;同时对维护人员的能力也提出了前所未有的要求。 列车控制系统
一、列车通信网路 二、总线系统基本概念 三、列车控制系统 1、列车控制系统硬件及其主要功能 2、列车控制系统网络结构 3、冗余概念 4、列车诊断
龙门吊轨道基础计算书
附件一 1 预制梁场龙门吊计算书 1.1工程概况 1.1.1工程简介 本项目预制梁板形式多样,分别为预制箱梁、空心板及T梁,其中最重的是30m 组合箱梁中的边梁,一片重达105t。预制梁场拟采用两台起吊能力为100t的龙门吊用于预制梁的出槽,其龙门吊轨道之间跨距为36.7m。 1.1.2地质情况 预制梁场基底为粉质粘土。查《路桥施工计算手册》中碎石土的变形模量E0=29~65MPa,粉质粘土16~39MPa,考虑最不利工况,统一取粉质粘土的变形莫量E0=16 MPa。临建用地经现场动力触探测得实际地基承载力大于160kpa。 1.2基础设计及受力分析 1.2.1龙门吊轨道基础设计 龙门吊轨道基础采用倒T型C30混凝土条形基础,基础底部宽80cm,上部宽40cm。每隔10m设置一道2cm宽的沉降缝。基础底部采用8根Φ16钢筋作为纵向受拉主筋,顶部放置4根Φ12钢筋作为抗负弯矩主筋,每隔40cm设置一道环形箍筋。,箍筋采用HPB235Φ10mm光圆钢筋,箍筋间距为40cm,具体尺寸如图1.2.1-1、1.2.1-2所示。
图1.2.1-1 龙门吊轨道基础设计图 图1.2.2-2 龙门吊轨道基础配筋图 1.2.2受力分析 梁场龙门吊属于室外作业,当风力较大或降雨时候应停止施工。当起吊最重梁板(105t)且梁板位于最靠近轨道位置台座的时候为最不利工况。
图1.2-1 最不利工况所处位置 单个龙门吊自重按G1=70T估算,梁板最重G2=105t。起吊最重梁板时单个天车所受集中荷载为P,龙门吊自重均布荷载为q。 P=G1/2=105×9.8/2=514.5KN (1-1) q=G2/L=70×9.8/42=16.3KN/m (1-2)当处于最不利工况时单个龙门吊受力简图如下: ` 图1.2-3 龙门吊受力示意图 龙门吊竖向受力平衡可得到: N1+N2=q×L+P (1-3)取龙门吊左侧支腿为支点,力矩平衡得到: N2×L=q×L×0.5L+P×3.5 (1-4)由公式(1-3)(1-4)可求得N1=869.4KN,N2=331.1KN 龙门吊单边支腿按两个车轮考虑,两个车轮之间距离为6m,对受力较大支腿进行分析,受力简图如下所示:
中国列车运行控制系统-ctcs系统
中国列车运行控制系统 CTCS- Chinese Train Control System CTCS概述 地面子系统可由以下部分组成:应答器、轨道电路、无线通信网络(GSM-R)、列车控制中心(TCC)/无线闭塞中心(RBC)。其中GSM-R不属于CTCS设备,但是重要组成部分。 应答器是一种能向车载子系统发送报文信息的传输设备,既可以传送固定信息,也可连接轨旁单元传送可变信息。 轨道电路具有轨道占用检查、沿轨道连续传送地车信息功能,应采用UM系列轨道电路或数字轨道电路。 无线通信网络(GSM-R)是用于车载子系统和列车控制中心进行双向信息传输的车地通信系统。 列车控制中心是基于安全计算机的控制系统,它根据地面子系统或来自外部地面系统的信息,如轨道占用信息、联锁状态等产生列车行车许可命令,并通过车地信息传输系统传输给车载子系统,保证列车控制中心管辖内列车的运行安全。 车载子系统可由以下部分组成:CTCS车载设备、无线系统车载模块。 CTCS车载设备是基于安全计算机的控制系统,通过与地面子系统交换信息来控制列车运行。 无线系统车载模块用于车载子系统和列车控制中心进行双向信息交换。 CTCS - 简介 TDCS是铁路调度指挥信息管理系统,主要完成调度指挥信息的记录、分析、车次号校核、自动报点、正晚点统计、运行图自动绘制、调度命令及计划的下达、行车日志自动生成等功能,还句话说就是原来行车调度员和车站值班员需要用笔记下的东西现在都可以由TDCS自动完成。 中国铁路调度指挥系统
参考欧洲ETCS规范,中国逐步形成了自己的CTCS(Chinese Train Control System)标准体系。如何吸收ETCS规范并结合中国国情更好地再创新,是值得深入研究的课题。 铁路是国民经济的大动脉,是中国社会和经济发展的先行产业,是社会的基础设施,铁路运输部门又是国民经济中的一个重要部门,它肩负着国民经济各种物资运输的重任,对中国社会主义建设事业的发展有着举足轻重的作用。为了满足国民对铁路运输的要求,进入二十一世纪以后,铁路部门致力于高速铁路和客运专线的建设,并取得了骄人的成绩。 为了适应中国高速铁路、客运专线的迅速发展和保证铁路运输安全的需要,铁道部有关部门研制成功了“CTCS系统”(即:铁路列车控制系统,是Chinese Train Control System的缩写“CTCS”) CTCS - 产生背景 由于早期欧洲铁路的列车运行控制系统种类繁多,且各国信号制式复杂、互不兼容,为有效解决各种列车控制系统之间的兼容性问题,保证高速列车在欧洲铁路网内跨线、跨国互通运行,1982年12月欧洲运输部长会议做出决定,就欧洲大陆铁路互联互通中的技术问题寻找解决方案。 2001年欧盟通过立法形式确定ETCS(European Train Control System)为强制性技术规范。ETCS的主要目标是互通互用、安全高效、降低成本、扩展市场,在规范的设计上融入了欧洲各主要列控系统的功能,制定了比较丰富的互联互通接口。经过长期的发展,ETCS系统目前已经比较成熟,得到了欧洲各国铁路公司和供货商的广泛认可。 中国人口密集,资源紧张,城市化发展非常迅速。一直处于发展中的中国铁路,始终存在着运量与运能之间的突出矛盾。铁路运输至今仍相当程度地制约着国民经济的快速发展,铁路仍是我国国民经济发展中的一个薄弱环节。为了缓解铁路运输的压力,铁路部门先后实行了六次大提速。 与此同时,高速铁路的蓬勃发展,对铁路的中枢神经——信号系统也提出了新的技术要求。但由于历史及技术原因,中国铁路存在多种信号系统,严重影响了运输效率。铁路信号系统迫切需要建立统一的技术标准,确立数字化、网络化、智能化、一体化发展方向,国产高速铁路列车运行控制系统标准的制定迫在眉睫。为实现高铁战略,铁道部组织相关专家开始制定适合我国国情的中国列车控制系统CTCS(Chinese Train Control System)。 在CTCS 技术规范中,根据系统配置CTCS按功能可划分为5 级。为满足客运专线和高速铁路建设需求,通过对ETCS标准的引进、消化、吸收,并结合成功应用的CTCS-2级列车运行控制系统的建设和运营经验,我国构建了具有自主知识产权的CTCS-3级列控系统标准。CTCS-3级列车运行控制系统是基于GSM-R无线通信的重要技术装备,是中国铁路技术体系和装备
龙门吊轨道施工方案(含设计及验算)
目录 1 编制依据1 2 工程概况1 3 龙门吊设计1 3.1 龙门吊布置1 3.2 龙门吊轨道梁设计1 4 主要施工方法4 4.1 施工顺序及工艺流程4 4.2 基底回填4 4.3 素砼垫层施工4 4.2 基础钢筋4 4.3 基础砼5 4.4 轨道安装5 5 质量控制标准6 6 安全文明施工7 6.1 安全施工7 6.2 文明施工措施8
1 编制依据 1、《***》施工图、《***》施工图; 2、龙门吊生产厂家提所供有关资料; 3、《建筑地基基础设计规范》(GB50007-2002); 4、《砼结构设计规范》(GB50010-2002)。 2 工程概况 ***。 3 龙门吊设计 3.1 龙门吊布置 ***布置3台龙门吊,一期围挡布置一台,跨度21m,起重量10t,二期围挡布置2台,跨度15m,起重量10t;轨道均采用P38钢轨,轨道平面布置图如附图1。 3.2 龙门吊轨道梁设计 两种跨度龙门吊,轨道梁梁设计按21m跨度进行。21m跨度龙门吊整机自重18.5t,最大起重量10t。单侧两个轮压为18.5÷2+10=19.25t,单个轮压为9.6t;施工过程中考虑施工安全系数为1.1,则单个轮压为10.56t(即105.6kN) 1、轨道梁断面形式 轨道梁截面形式采用500mm(宽)×400mm(高),混凝土采用C30砼。 2、轨道梁受力计算 按照文克勒地基模型计算本工程轨道梁,混凝土承载力大于杂填
土,整体按500mm ×400mm 梁考虑,该段轨道梁长L 约90m ,根据《地基与基础》中计算公式 44EI kb =λ 其中: k ——基床系数,本工程为卵砾石,取 3.0×104kN/m 3,即 3.0×10-2N/mm 3; C30混凝土取E=3×104 N/mm 2; 49331067.240050012 1121mm bh I ?=??== 则m mm 47.01065.410 67.21034500100.344942=?=??????=--λ L=100m, πλ>=?=4710047.0L ,故该段轨道梁为无限长梁。 对于无限长梁 ()x x x e P M λλλλ sin cos 04-= x x x e D P V λλcos 02 --= ()x x x e b P P λλλλsin cos 02+-= 当0=x λ时,M 、V 、P 均取最大值 m kN P M ?=?== 17.5647 .046.10540λ kN P V 8.522 6.10540=== kPa b P P 63.495.024 7.06.10520=??==λ 3、轨道梁配筋计算 根据混凝土结构设计规范,混凝土保护层取45mm ,C30混凝土轴
城市轨道交通列车自动控制系统简介-精选文档
城市轨道交通列车自动控制系统简介 、前言 随着城市现代化的发展,城市规模的不断扩大,城市轨道交通的发展已成为解决现代城市交通拥挤的有效手段,其最大特点是运营密度大、列车行车间隔时间短、安全正点。城市轨道交通列车自动控制系统是保证列车运行安全,实现行车指挥和列车运行现代化,提高运输效率的关键系统设备。 二、列车自动控制系统的组成 列车自动控制(ATC系统由列车自动防护系统(ATP、列车自动驾驶系统(ATO和列车自动监控系统(ATS三个子系统组成。 一列车自动防护( ATP-Automatic Train Protection 系统 列车自动控制系统中的ATP的子系统通过列车检测、列车间 隔控制和联锁(联锁设备可以是独立的,有的生产厂商的系统也可以包含在ATP系统中)控制等实现对列车相撞、超速和其他危险行为的防护。 二列车自动驾驶系统 ( AT0?CAutomatic Train Operation 列车自动驾驶子系统(ATO与ATP系统相互配合,负责车 站之间的列车自动运行和自动停车,实现列车的自动牵引、制动 等功能。ATP轨旁设备负责列车间隔控制和报文生成;通过轨道
电路或者无线通信向列车传输速度控制信息。ATP与ATO车载系 统负责列车的安全运营、列车自动驾驶,且给信号系统和司机提供接口。 三)自动监控(ATS-Automatic Train Super -vision )系统 列车自动监控子系统负责监督列车、自动调整列车运行以保证时刻表的准确,提供调整服务的数据以尽可能减小列车未正点运行造成的不便。自动或由人工控制进路,进行行车调度指挥, 并向行车调度员和外部系统提供信息。ATS功能主要由位于OCC 控制中心)内的设备实现。 三、列车自动控制系统原理 一)列车自动防护(ATP) ATP是整个ATC系统的基础。列车自动防护系统(ATP亦 称列车超速防护系统,其功能为列车超过规定的运行速度时即自动制动,当车载设备接收地面限速信息,经信息处理后与实际速度比较,当列车实际速度超过限速后,由制动装置控制列车制动系统制动。 ATP通过轨道电路或者无线GPS系统检测列车实际运行位 置,自动确定列车最大安全运行速度,连续不间断地实行速度监督,实现超速防护,自动监测列车运行间隔,以保证实现规定地行车间隔。防止列车超速和越过禁止信号机等功能。 按工作原理不同,ATP子系统可分为“车上实时计算允许速
龙门吊轨道基础施工方案讲解
兰州市轨道交通1号线一期工程 (陈官营~东岗段) 七里河站龙门吊基础施工方案 编制: 审核: 审批: 八冶建设集团有限公司 兰州轨道交通1号线一期TJⅡ-8B项目部
2015年03月14日
目录 一、编制依据 (2) 二、工程概况 (2) 三、龙门吊基础设计 (3) 3.1 龙门吊布置 (3) 3.2 龙门吊轨道梁及垫层设计 (4) 四、主要施工方法 (8) 4.1施工顺序及工艺流程 (8) 4.2基础开挖 (8) 4.3素砼垫层 (8) 4.4基础钢筋 (9) 4.5基础砼 (9) 4.6轨道安装 (10) 五、质量控制标准 (12) 六、安全及文明施工 (13) 6.1 安全施工 (13) 6.2文明施工措施 (13)
七里河站龙门吊基础施工 一、编制依据 1.《建筑地基基础设计规范》 2.《混凝土结构设计原理》 3.《七里河站主体结构施工图》 4.《七里河站围护结构施工图》 5. 龙门吊生产厂家所提供有关资料 二、工程概况 七里河站为兰州市城市轨道交通1 号线一期工程中间车站,位于七里河
图2.1-1 七里河车站平面位置图 七里河站起点里程为YCK20+557.603,终点里程为YCK20+808.103,有效站台中心里程YCK20+727.803。采用地下两层双柱三跨(部分区段为三柱四跨),的结构形式,车站主体净长为230.5m,标准段净宽为20.8m,总高13.17m,为岛式车站。车站底板埋置深约18.07m,结构顶板覆土深度约3.2m。车站在西津东路南北两侧各设两个出入口,其中一号出入口为远期规划,不在本次施工范围。车站两端于南北侧各设置1 组风亭。车站采用明挖顺做法施工,根据总体筹划,车站按照盾构过站考虑。 车站主体围护结构采用Φ800mm@1400mm钻孔桩,桩间采用挂网喷射混凝土挡土,同时根据地质条件选定在布置降水井进行基坑内外的降水。支撑结构自上而下设一道1000*1000钢筋混凝土结构支撑,2道Φ609、壁厚16mm 的钢管支撑。附属围护结构采用钻孔灌注桩加内支撑的支护形式,桩间采用挂网喷射混凝土(有淤泥层时,局部桩间采用旋喷桩加固)挡土,同时采用降水井降水。 三、龙门吊基础设计 3.1 龙门吊布置 七里河站共设置两台龙门吊,位于基坑北侧,跨度20.4 m,额定提升重量
MVB总线在地铁列车控制系统中的应用.
MVB总线在地铁列车控制系统中的应用 摘要:介绍了 MVB 总线的物理层、帧和报文的格式与时序, 以及其在广州地 铁 2 号线、深圳地铁 1 号 线、上海地铁1 号线延长线等车辆控制系统中的成功应用。 关键词:地铁列车; 多功能车辆总线( MVB) ; 帧; 报文; 自动控制 地铁 2 号线、深圳地铁 1 号线、上海地铁 1 号线延长线的列车 均采用了符合 IEC61375 TCN 标准的德国总线控制系统。该系统由列车总线 ( WTB) 和多功能车辆总线( MVB) 两部分组成, 单元( 整个列车 6 辆车为一个编组, 3 辆车为 1 个单元) 内用 MVB 总线连接, 两个单元间用 WTB 总线连接, MVB 总线实现车辆控制, WTB 总线实现列车控制。 1 MVB 总线的物理层和链路层 MVB 总线模型是在开放系统互联 OSI 模型的基础上进行了简化。OSI 具有 7 层参考模型, 而 MVB 只有其中的物理层和链路层。 1.1 物理层 MVB 总线的物理层有 3 种: 1) ESD( 电的短距离传输介质) , 使用双绞屏蔽线, 按RS- 485 标准, 最多支持 32 个设备, 最大总线长度 20 m 。 2) EMD( 电的中距离传输介质) , 使用双绞屏蔽线, 最多支持 32 个设备, 最大总线长度 200 m 。允许使用变压器连接。 3) OGF( 光纤媒介) , 使用总线连接器, 传输距离可达2 km。 MVB 总线系统是分级控制系统。系统设备共分 5 个级别, 6 种能力: 1) 1 级设备具有的能力有设备状态和过程数据。设备端口地址一 般与设备地址一致。 2) 2 级设备具有的能力有设备状态, 过程数据, 信息数据, 是智 能设备可以通过总线配置, 但不能编程。 3) 3 级设备具有的能力有设备状态, 过程数据, 信息数据和用户 编程。 4) 4 级设备具有的能力有设备状态、过程数据、信息数据和总管 理器。用户编程具有可选性。 5) 5 级设备具有的能力有设备状态、过程数据、信息数据、网关 和总线管理器。具有总线管理器的网关能与各种总线同步。 1.2 链路层数据 1.2.1 帧和报文格式 有效的帧格式见图 1。
列车总线控制系统的CAN—485总线网关设计
列车总线控制系统的CAN—485总线网关设计 摘要: 介绍了列车总线控制系统控制系统中的CAN总线与485总线之间的互联互联网关,CAN总线控制器INTEL82526的基本工作原理和功能,给出了CAN—485总线网关的软、硬件具体实现方案。 关键词: CAN总线 485总线互联 INTEL82526 CAN—485总线网关 随着现场总线控制技术的发展和成熟,越来越多的集散控制系统采用现场总线来构建控制系统。在大规模、高性能的复杂大系统中存在着大量的被控设备,而且每个被控设备有着不同的实时性实时性要求。从网络化控制的角度分析可知,简单地采用一条现场总线把复杂大系统中的所有被控设备联接起来会降低整个系统的稳定性和可控性,是性能不好的控制网络拓扑形式。针对特定的现场总线,在不同的应用环境中,一条网络段上通讯结点数有一个合理范围,超出这个范围将导致网络控制性能的恶化[1~2]。另外,实时性差异较大的设备共存于一条网络段也易于造成整个系统不稳定。因而,在一个复杂的网络化控制系统中,按实时性和功能性分段,构造多个现场总线段是一种较为合理的拓扑形式,利于整个系统的稳定和性能的优化[2]。从性价比角度看,两段实时性差异较大的网络段采用相同的现场总线构建是不划算的,采用合适的两种现场总线分别构建较为合理。控制网络的分段和网段采用不同的现场总线构建带来了两个异种现场总线之间互联的问题。本文所探讨的列车总线中CAN总线与485总线网关为两个异种现场总线间的互联提供了一种解决方案。 1 网关硬件设计 1.1 INTEL 82526简介 82526是INTEL公司生产的执行CAN总线规范的CAN控制器,它包括CAN总线规范所规定的所有硬件模块(传输层和目标层)。82526与微处理器或微控制器微控制器联接时能够完成物理层和数据链路层的基本功能。82526内部结构原理图。82526采用分时复用的8位地址/数据总线,可与INTEL系列的微处理器或微控制器协同工作。片内双口RAM作为CPU和接口管理处理器之间的通信缓存接口,CPU初始化全局的状态和控制寄存器,并在双口RAM内建立通信目标用以接收和发送报文。位流处理器控制接口管理处理器和总线之间的数据流。另外,位流处理器也控制收发控制逻辑和错误管理逻辑。总线定时逻辑则通过差分输入比较器监视总线并确定串行总线的位定时。接口管理处理器执行主控制器命令并控制串行总线上的数据传送、全局状态和控制寄存器位。处理器接口单元是82526到CPU的接口。 1.2 网关的硬件结构 网关的硬件电路原理图。整个硬件电路由三部分构成:微控制器及其外围扩展电路,CAN 总线控制器及CAN总线接口电路,异步串行通讯串行通讯控制器和485总线接口电路。 1.2.1 微控制器及其外围扩展电路 网关采用了ATMEL公司的AT89C51型微控制器。AT89C51是与8X51系列微控制器兼容的增强型微控制器,其内部集成了4K字节的FLASH ROM[3]。由于网关的软件及参数查询表所占用存储空间小于4K,网关没有在AT89C51外扩展程序存储器。AT89C51是网关处理、控制和转换总线数据的核心,其主要功能有三个:一是CAN总线控制器82526接收到CAN总线上其它通讯结点的数据后,交给AT89C51处理,将这些数据转换为预先定义的485总线上传输数据的协议格式,由AT89C51控制异步串行通讯控制器通过485总线接口MAXIM485将这些数据发送到
龙门吊轨道基础验算书
龙门吊轨道基础验算 初步设计:龙门吊轨道基础截面尺寸暂定高*宽=0.4*0.6,纵向上下各布置3根Φ16通长钢筋,箍筋选用φ10钢筋间距25cm布置,选用C20砼 1、荷载计算, 荷载取80t龙门吊提一片16m空心板移动时的的荷载 空心板混凝土取a=9m3 空心板钢筋d=1.4t 80T龙门吊自重取b=30t 混凝土容重r=26KN/m3 安全系数取1.2,动荷载系数取1.4 集中荷载F=1.2*1.4(a*r+b*10+d*10)=1.2*1.4(9*26+30*10+1.4*10)=920.64KN 龙门吊轮距为L=6.6m,计算轮压为F1=920.64/4=230.16KN 均布荷载为钢轨和砼基础自身重量,取1m基础计算 其对应地基承载力P0=(0.1*10+0.6*0.4*26)*1.2=7.24KPa 我们采用“弹性地基梁计算程序2.0”计算基底反力和弯矩,忽略钢轨对荷载分布的影响,在龙门吊轮子处简化为集中荷载230.16KN “弹性地基梁计算程序2.0”界面图
地基压缩模量Es取35MPa,地基抗剪强度指标CK取40 当龙门吊运行到轨道末端时,取10m轨道基础计算,计算结果:
此时基底最大反力为端头处144.9KN,其所受压强P1=144.9/(0.6*1.1)=219.5KPa 此处填方为宕渣填筑,承载力取300KPa>P0+P1 此时为基础顶面受拉,最大弯矩为228.4 抗拉钢筋配筋计算公式为As=M/(0.9H0*fy) As——钢筋截面积 M ——截面弯矩 H0——有效高度 Fy——二级钢筋抗拉强度取335MPa 一级钢筋抗拉强度为235 MPa 代入计算得As=228.4/(0.9*0.37*335*1000)=0.002047㎡=2047mm2 考虑到基础顶面布置有截面积为1493mm2的钢轨,我们在顶面布置3根Φ16钢筋 当龙门吊运行在正常区间内时,取16.6m基础进行计算,计算结果为:
龙门吊轨道基础计算书
龙门吊轨道基础计算书 1.编制依据 (1)《基础工程》(人民交通出版社); (2)《吊车轨道的连接标准》(GB253); (3)《机械设备安装工程施工及验收通用规范》(GB50231-98); (4)《建筑地基基础设计规范》(GB50007-2002); (5)《公路钢筋混凝土及预应力混凝土桥涵设计规范》(JTG D62-2004); (6)《公路工程施工安全技术规范》(JTG F90-2015); 2.工程概况 本项目为江苏省江都至广陵高速公路改扩建工程路基桥涵施工项目JG-JD-2标段,起自大桥互通,终于扬泰交界处,起讫点桩号为K980+400~K992+533.927,全长12.134km,途经大桥、浦头两镇。 本工程为既有高速“四改八”项目,目前路基宽度为26m,改扩建采用两侧各拼宽8m,路基宽42m。 本标段先张法空心板梁共428片,其中13m板梁16片,16m板梁400片,20m 板梁12片。后张法25mT梁24片,后张法30m箱梁64片(单片重93t)。 考虑施工场地、施工条件及预制梁总量,先张法空心板梁和后张法预制梁均采用外购成品梁;空心板梁梁场存梁能力满足施工要求,后张法预制梁梁场受施工场地限制,存梁能力较小;综上考虑,在X203跨线桥16#台尾附近设置存梁台座,存梁能力36片。 存梁区域龙门吊轨道基础长200m,龙门吊轨道基础中心间距16m,龙门吊轨道基础采用“凸型”钢筋混凝土结构;存梁区域共设有3个存梁台座,存梁台座可存梁36片(双层存梁)。 存梁区域投入2台60t龙门吊,跨度16m,龙门吊主承重梁采用桁架结构,长25m,支腿高度9m。单台龙门吊自重为27t。 3.设计说明 龙门吊走行轨道基础采用钢筋混凝土条形基础,采用倒T形截面,混凝土强度等级为C30。龙门吊走行轨道采用龙门吊厂家设计要求采用的起重钢轨型号,基础设计中不考虑轨道与基础共同受力作用,忽略钢轨承载能力。基础按弹性地基梁进行分析设计。
CAN-bus现场总线基础教程【第1章】现场总线CAN-bus-CAN总线简介(1)
第1章现场总线CAN-bus 1.1 从“罐头”说起 我们知道英文单词“can”有一个意思是罐头,那我们就借题发挥从“罐头”说起吧。 很多人小时候都自制过一种叫传声筒的玩具,就是在两个罐头的底部打孔后,用一根绳子将两个罐头系起来。一旦绳子绷紧后,对这一个罐头喊话,另一罐头就可以传出声音。它的原理很简单,对着喊话的那个罐头把声波产生的振动传导到绷紧的绳子上,绳子再将这种振动传导到另一个罐头上,这个罐头又把这种振动传导给空气形成声波。这样就可以实现一侧说话一侧听了。 图1.1 童年的传声筒 因为声音在传声筒中是以振动波的形式传递的,我们可以设想,如果要一人说话多人听那该怎么办呢?这很容易实现,只要在绳子上系上更多的传声筒,让振动波可以传到更多的罐头里,自然可以就可以实现“多方通话”了。当然,因为声波能量有限,绳子上系的罐头越多,每个罐头分配到的能量就越少,收听到的声音也就越小。 其实本章要介绍的现场总线和传声筒这种原始通信工具的原理是相通的。只不过电电缆取代了绳子,电信号取代了振动波,电路板取代了罐头,喊话的内容则由各种需要传递的数据取代了。典型的现场总线应用如图1.2所示,和上面的传声筒是不是很相似呢? 图1.2 现代的现场总线 1.2 通信的层次 通信是分层的,这个概念应该贯彻在我们学习任何通信系统的整个过程中。我们仍以上面的传声筒游戏为例,假如小男孩想表达“你好”的意思,那他不会关心声音如何让罐头振动,更不会关心“你好”在绳子上是以横波还是纵波传输的,他关心的是自己表达的意思对方能不能理解。在通信层次划分上来说,两个小朋友就处于“应用层”。很显然,应用层是整个通信系统存在的唯一目的,任何通信系统都是为应用层服务的。 相对于“你好”这个想法,说出“你好”这个词就有很多种表达方法了,可以是中文、英
龙门吊轨道梁基础计算书
龙门吊基础设计计算书 1、设计依据 《基础工程》(第二版),清华大学出版社; 《建筑地基基础设计规范》(GB50007-2011); 龙门吊生产厂家提供有关资料; 《混凝土结构设计规范》(GB50010-2010); 《建筑施工计算手册》。 2、工程概况 翠柏里站为8.1m侧式站台地下二层岛式车站,车站站台中心里程为 SK16+399.784,为三柱四跨钢筋混凝土箱型结构,车站基坑宽24.3~25.3m,长约223m,站台中心里程处顶板覆土约1.5m,南北端头井基坑深分别为17.97m、 18.42m。翠柏里站前后区间采用类矩形盾构施工,两端均为盾构始发。车站主体结构上方加建二~三层商业开发用房,利用车站的框架柱及桩作为基础。 为确保施工进度与安全质量按时按标完成,我项目部拟配置2台MH10/10t-28.1m电动葫芦门式起重机,起重机满载总重150t,均匀分布在8个轮上,理论计算轮压: 8/= = = * 150 8/8.9 mg kN f7. 183 为确保安全起见,将轮压设计值提高到320kN进行设计。西侧基础梁拟采用1200mm*800mm的主体围护顶圈梁作为基础梁,长度根据现场实际情况施工,东侧基础梁拟采用500mm*1500mm的地下连续墙的导墙作为轨道梁基础,总长超过 223m,混凝土强度等级为C30。基础设计中不考虑轨道与基础的共同受力作用,忽略钢轨承载能力不计,按半无限弹性地基梁进行设计。
图1 基础梁 受力简图 3、西侧轨道梁梁的截面特性 西侧轨道梁混凝土梁采用C35混凝土,抗压强度35MPa。如图所示,轴线至梁底距离: 4.0 1y= m y4.0 = m 2 图2 基础梁截面简图 梁的截面惯性矩: I=b*h3/12=0.051m3 梁的截面抵抗矩:
40t龙门吊轨道梁及基础柱计算
一基本情况 40T龙门吊的跨度为11.4m,根据现场需要设置于出土孔处,龙门吊基础柱为800X800钢筋砼基础,两端支座设置于围护桩冠梁上,中间两支座设置于主体结构纵梁上。龙门吊走行梁为800x1400砼梁,梁顶与地面平齐。计算示意图如下。 图1 40T龙门吊基础梁计算简图 3.2龙门吊参数: 表2 龙门吊参数 3.4龙门吊工况 40t龙门吊达到最大起重量、小车行至极限位置(小车满载停在支腿一侧的悬臂端处),且当两架龙门吊位于主体结构G-F轴中部时,基础柱承受轴力最大;基础梁最大弯矩通过时程分析,取最大弯矩验算。 3.5走行梁荷载计算 1、走行梁竖向荷载 查40t龙门吊图纸得知,龙门吊的大车最大轮压为330KN,龙门吊一侧轮距8.5m,每侧两肢共4个轮,计算竖向荷载标准值为660KN。 考虑荷载分项系数,取1.4 考虑吊车竖向荷载动力系数,按工作级别为A6~A8 软钩吊车取1.10 2、走行梁横向水平荷载 吊车横向水平荷载标准值,取横行小车重量及额定起重量之和的百分比,本吊车
额定起重为40T, 吊车横向水平荷载标准值百分数为10% 龙门吊四肢每肢横向水平荷载标准值为: Tk=0.5*0.5×(Q+g1)g×10%=0.5*0.5*(40+23.1)*10*0.1=15.8KN 3、走行梁纵向水平荷载设计值 (制动力引起的纵向水平荷载计算此处略) 4、走行梁其他荷载设计值 钢板、轨枕、钢轨等重量按每米60kg计算(走行梁自重不考虑,因为装配式贝雷梁桥容许荷载已考虑自重)。 3.6走行梁内力计算 1、走行梁竖向内力计算 1 计算简图: 2 计算条件: 荷载条件: 均布恒载 : 0.00kN/m 均布活载 : 0.00 梁容重 : 25.00kN/m3计算时考虑梁自重: 考虑 恒载分项系数: 1.20 活载分项系数 : 1.40 移动荷载: 移动荷载数目 :1 机械1-集中力F(kN):660 660 机械1-间距(m) :8.5 梁左移动限制 : 否梁左移动限制距离: ---- 梁左移动限制 : 否梁左移动限制距离: ---- 单元划分长度 : 0.200m 机械最小移动步长: 0.200m 机械间最小间距 : --- 机械荷载分项系数: 1.540 3 内力简图: 2、走行梁水平内力计算 1 计算简图: 2 计算条件: 荷载条件: 均布恒载 : 0.00kN/m 均布活载 : 0.00 梁容重 : 25.00kN/m3计算时考虑梁自重: 不考虑 恒载分项系数: 1.20 活载分项系数 : 1.40 移动荷载: 移动荷载数目 :1 机械1-集中力F(kN):15.8 15.8 机械1-间距(m) :8.5 梁左移动限制 : 否梁左移动限制距离: ---- 梁左移动限制 : 否梁左移动限制距离: ----
列车运行控制系统
列车运行控制系统 2010-03-25 14:52:17| 分类:铁路基础知识| 标签:|字号大中小订阅 根据列车在铁路线路上运行的客观条件和实际情况,对列车运行速度及制动方式等状态进行监督、控制和调整的技术装备。系统包括地面与车载两部分,地面设备产生出列车控制所需要的全部基础数据, 例如列车的运行速度、间隔时分等;车载设备通过媒体将地面传来的信号进行信息处理,形成列车速度控 制数据及列车制动模式,用来监督或控制列车安全运行。系统改变了传统的信号控制方式,可以连续、实 时地监督列车的运行速度,自动控制列车的制动系统,实现列车的超速防护。列车控制方式可以由人工驾驶,也可由设备实行自动控制,使列车根据其本身性能条件自动调整追踪间隔,提高线路的通过能力。 新一代铁路信号设备是由列车调度控制系统及列车运行控制系统两大部分组成的。从技术发展的趋势看是向着数字化、网络化、自动化与智能化的方向发展。它的作用是保证行车安全、提高运输效率、 节省能源、改善员工劳动条件。 发展中的列车控制系统将成为一个集列车运行控制、行车调度指挥、信息管理和设备监测为一体的综合业务管理的自动化系统。 列车运行控制系统的内容是随着技术发展而提高的,从初级阶段的机车信号与自动停车装置,发展到列车速度监督系统与列车自动操纵系统。 进入20世纪90年代,世界上已有许多国家开发了各自的列车运行控制系统,其中,在技术上具有代表性且已投入使用的主要有:德国的LZB系统,法国的VM300和TVM430系统,日本新干线的ATC 系统等。这些系统的共同特点是:可以实现自动连续监督列车运行速度,可靠地防止人为错误操作所造成 的恶性事故的发生,保证列车的高速安全运行。它们之间的主要区别体现在控制方式、制动模式及信息传 输等形式方面。 中国近几年来,对国外列车控制系统进行了较深入的研究,对列车控制模式、轨道电路信息传输、轨道电缆信息传输等方面都已取得不少的成果。在开发过程中,还可借鉴欧洲列车控制系统“功能叠加”、“滚动衔接”的经验,从保证基本安全着手,分步完成并真正达到安全、高效、舒适的目标。 中国列车运行控制系统(CTCS)介绍 CTCS CTCS是(Chinese Train Control System)的英文缩写,中文意为中国列车运行控制系统。 CTCS概述 CTCS系统有两个子系统,即车载子系统和地面子系统。
龙门吊轨道梁基础计算书
佳~管区间盾构场地龙门吊基础设计计算书 1、设计依据 《基础工程》(第二版),清华大学出版社; 《建筑地基基础设计规范》(GB50007-2011); 龙门吊生产厂家提供有关资料; 《混凝土结构设计规范》(GB50010-2010); 《建筑施工计算手册》。 2、工程概况 佳海工业园明挖段为佳~管区间盾构始发场地,拟配置2台MGtz 型45t-19.2m门式起重机,起重机满载总重150t,均匀分布在8个轮上,理论计算轮压: 150 8/= = = * f7. kN mg 183 8/8.9 为确保安全起见,将轮压设计值提高到320kN进行设计。基础梁拟采用顶面500mm*底面1000mm梯形截面钢筋混凝土条形基础梁,高度500mm,长度根据现场实际情况施工,总长超过100m,轨道梁设置在场地路基上,混凝土强度等级为C30。基础设计中不考虑轨道与基础的共同受力作用,忽略钢轨承载能力不计,按半无限弹性地基梁进行设计。
图1 基础梁受力简图 3、梁的截面特性 混凝土梁采用C30混凝土,抗压强度30MPa 。设计采用条形基础,如图所示,轴线至梁底距离: m hc bd c b d cH y 207.0) 5.0*3.02.0*1(*2)5.01(*2.05.0*5.0)(2)(22221=+-+=+-+= m y H y 293.0207.05.012=-=-= 图2 基础梁截面简图
梁的截面惯性矩: 43131320215.0]))(([3 1m d y c b by cy I =---+= 梁的截面抵抗矩: 310734.0207 .05.00215 .0m y H I W =-=-= 混凝土的弹性模量: 27/10*55.2m kN E c = 截面刚度: 25710*47.510*55.2*0215.0kNm I E c == 4、按反梁法计算地基的净反力和基础梁的截面弯矩 假定基底反力均匀分布,如图所示,每米长度基底反力值为: m kN L F p /72.9379 .52*934.3320 *4=+= =∑ 若根据脚架荷载和基底均布反力,按静定梁计算截面弯矩,则结果表明梁不受脚架端约束可以自有挠曲的情况。 图3 基础梁受力简图
高速列车控制系统
高速列车控制系统 (1)车载设备。从20世纪80年代以后,在日本、法国和德国等国家的高速列车上发展新型控制系统,其主要特点是将列车位置传感器放在车上,不需要轨道电路等地面检测设备;在地面和车上之间的信息传输采用无线方式,从而能高速地进行大量的信息交换。由车载传感器接收地面的无线信息后,通过车上的微机处理,根据列车制动性能、线路坡度及限速对制动模式进行计算,以防止超速和冒进。 (2)列车控制级。列车控制级主要由动力车上的主控单元执行以下任务: ①从动力车上获取司机操纵台(包括牵引/制动指令)和ATP系统装置对列车控制的要求,并将控制所需的状态信息经过处理后送至各车辆的计算机接点,由后者将状态的故障信息反馈给主控单元。 ②实现列车单元之间的重联控制。 ③自动牵引/电制动控制,即牵引和动力制动级位的控制。 ④传送列车速度、动力制动级位和ATP要求,以便各动车和拖车的制动控制单元对各种制动设备进行制动力的分配,包括列车超速时的调速制动。 ⑤在列车停站时按列车运行方向和站台位置,控制拖车侧门的开启和关闭。 ⑥收集各车厢中主要设备的诊断数据,采取相应的故障对策,并在显示屏上显示。 ⑦根据ATP设备的信号允许速度要求和实际运行速度,对备用制动线输出控制要求,以便在通信故障时,司机仍能对列车进行常用制动和紧急制动的控制。为此,ATP系统应能及时将分相区预告信号、隧道通过信息传送给前导动力车的主控单元,再通过后者将其传达至各车厢的计算机节点。 ⑧与旅客信息系统接口。 ⑨对列车总线和车厢总线的信息传输实施管理。 (3)动力车车厢控制级。动力车车厢总线上的控制信息主要是牵引和转向架控制单元、空气制动单元、空调装置与主控制单元之间的交换信息,动力车车厢控