模态理论
Tyler & Sofrin 模态分析理论
非定常来流与叶片干涉产生的声波在风扇或涡轮中并非是任意形态存在的。Goldstein 在假定平均流场有势的前提下,建立起了平均流场中任意一点的扰动量与远前方来流扰动量之间的相互关系,给出了下面的方程,
()()00002000111I D D Dt c Dt ?ρ?ρρρ??-??=? ???u (0-1)
由以上方程可知,在非均匀平均流的情况下,来流扰动不仅通过边界条件与声扰动相互作用,而且在传播过程中也会与声扰动耦合,并形成如(2-2)右边所示声源[68]。在航空发动机叶轮机内部,最重要的边界条件就是管道效应,由于管道边界的限制,声波在其中只能以特定的形态出现,也就是我们常说的模态。在均匀平均流中,考虑一个环形管道,硬壁条件,对小扰动有下面的对流波动方程[12],
2222222110i M p p x x r r r r ωυ?????????+-+++= ? ?????????? (0-2)
波动方程描述的特征值问题是可解的,环形管道中我们可以将它的一般解展开为傅里叶-贝塞尔形式的模态
()()()1,,m m ik x ik x im m m m m p x r A e B e U r e μμθμμμμθ+-∞∞---=-∞==+∑∑ (0-3)
这里径向模态和径向、轴向波数分别满足
()
2222
2210m m m m m m m m m U U U r r Mk k k μμμμμμμμααω±??'''++-= ??
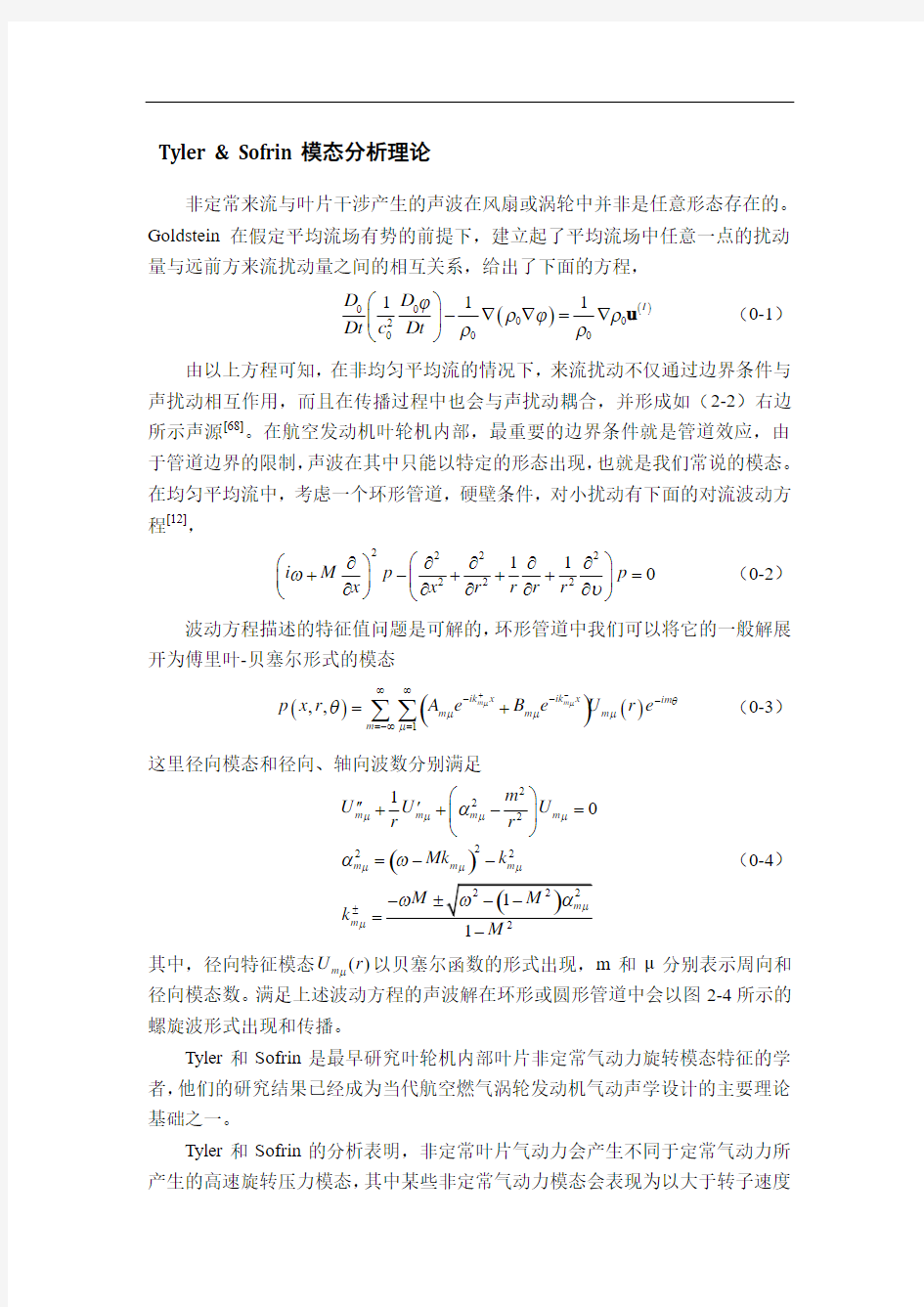
?=--= (0-4) 其中,径向特征模态()m U r μ以贝塞尔函数的形式出现,m 和μ分别表示周向和径向模态数。满足上述波动方程的声波解在环形或圆形管道中会以图2-4所示的螺旋波形式出现和传播。
Tyler 和Sofrin 是最早研究叶轮机内部叶片非定常气动力旋转模态特征的学者,他们的研究结果已经成为当代航空燃气涡轮发动机气动声学设计的主要理论基础之一。
Tyler 和Sofrin 的分析表明,非定常叶片气动力会产生不同于定常气动力所产生的高速旋转压力模态,其中某些非定常气动力模态会表现为以大于转子速度
的
图2- 1 圆形管道中的声波等相位表面
角速度旋转的压力图谱。这种物理现象可以用一架电影摄影机给旋转的轮子照相的情形类比分析,轮子投影运动的角速度可以与轮子真实速度有很大差别,它取决于轮子角速度、轮子辐条数目以及摄影机每秒钟所摄画面的数目。对于叶轮机械,非均匀流主要是由叶片的尾迹与势流场的干涉引起的,这种非均匀流中的传播模态主要是由转子和静子的叶片数目、转子旋转速度以及绝对气流速度等因素决定的。下面用一种简单的模型对叶轮机械非均匀传播模态进行说明。
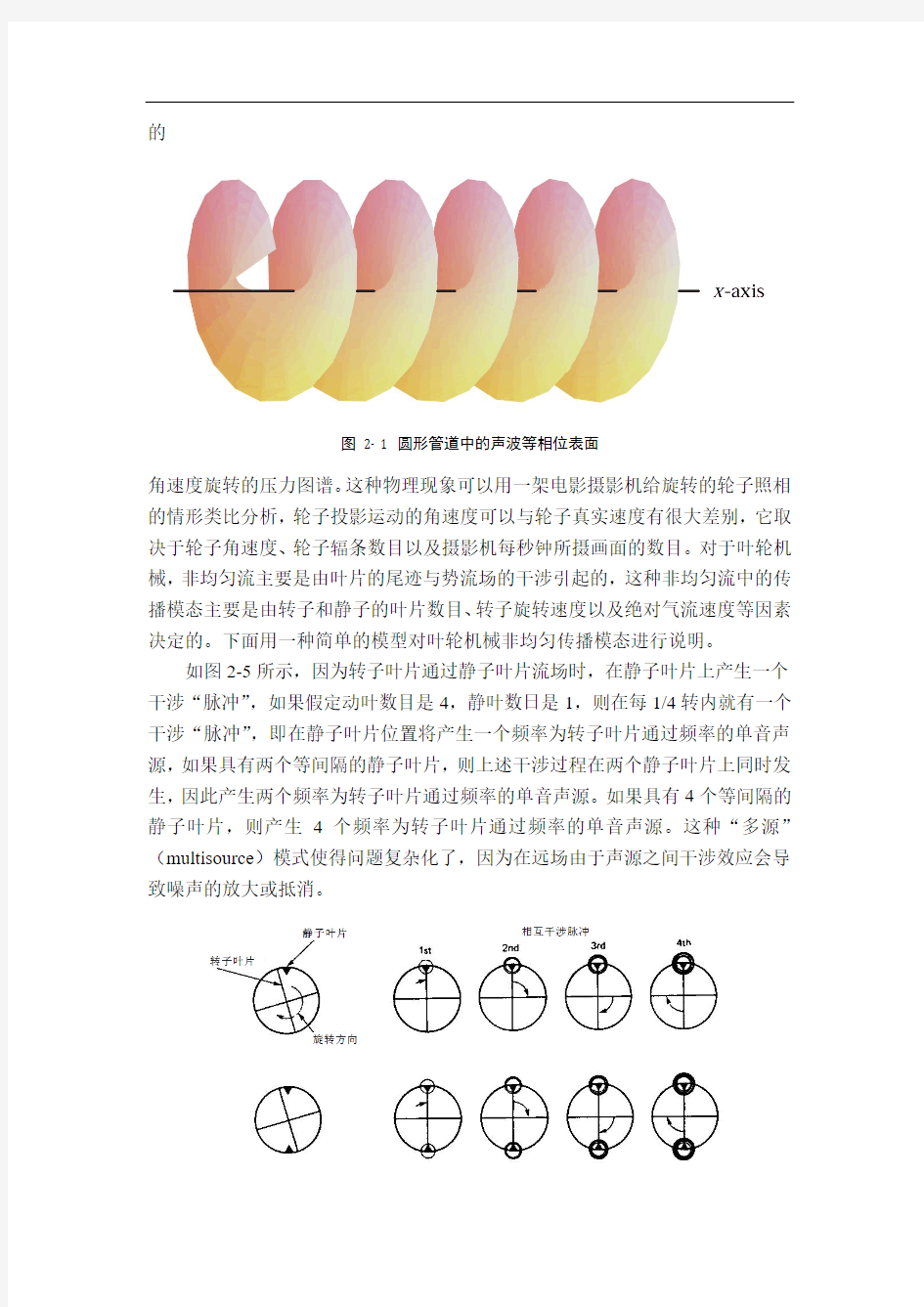
如图2-5所示,因为转子叶片通过静子叶片流场时,在静子叶片上产生一个干涉“脉冲”,如果假定动叶数目是4,静叶数日是1,则在每1/4转内就有一个干涉“脉冲”,即在静子叶片位置将产生一个频率为转子叶片通过频率的单音声源,如果具有两个等间隔的静子叶片,则上述干涉过程在两个静子叶片上同时发生,因此产生两个频率为转子叶片通过频率的单音声源。如果具有4个等间隔的静子叶片,则产生4个频率为转子叶片通过频率的单音声源。这种“多源”(multisource)模式使得问题复杂化了,因为在远场由于声源之间干涉效应会导致噪声的放大或抵消。
图2- 2 转子-静子干涉图示
对于一般的风扇/压气机或涡轮,静子叶片数目与转子叶片数目不是成准确的倍数关系,这时的物理现象更加复杂。如果静子叶片数且比转子叶片数少1个,如图2-6所示,转子叶片每l/4转诱导出3个干涉脉冲,这3个不同空间位置上的脉冲时间上等间隔,并且依次按转子旋转方向出现,因此,转子每旋转一周,不仅在每一个静叶上产生4次干涉,而且产生一个附加的与转子旋转方向一致的高速旋转的压力模态(4倍旋转速度),即使转子叶尖速度是亚音速,4倍的旋转速度的旋转压力模态的速度也可能超音速。有趣的是,当静子叶片数比转子叶片数目多1个时,同样会产生一个4倍旋转速度的旋转压力模态,但这时旋转压力模态与转子旋转方向相反。这一点对于控制风扇/压气机单音通过上游叶片排的传播和辐射是有重要意义的。
图2- 3 转子-静子干涉图示
上述旋转压力模态可以用一个相当简单的方式描述。如果转子叶片数目是B,静子叶片数目是V,则转子-静子干涉形成的旋转压力模态的n次谐波的周向阶数为
=(0-5)
m±
kV
nB
式中,k是任意常数,表示静子产生的畸变的空间谐波。此时干涉旋转压力模态的的叶尖周向马赫数为,
0m nB r M mc Ω= (0-6)
式中,r 0是叶尖半径,Ω为转子旋转角速度。Tyler 和Sofrin 给出了干涉旋转压力模态的轴向波数形式:
m k μ== (0-7)
也就是式(2-5)平均流马赫数为0时的情况,式中m μα与是管道轮毂比与外径的
函数(见附录1)。定义m m M m μα*=表示临界周向马赫数,Tyler 和Sofrin 指出,
当m M 小于m M *时,声波被截止,幅值沿轴向会很快衰减,而m M 大于m M *时,声
波表现出传播特性。从式(2-4)亦可见,当m k μ为虚数时,波动幅值沿轴向是以指数形式下降的,即旋转压力模态被“截止”(cut -off )。除了上述判断外,工程上应用更多的是下面的简单方法:
01/p r c nB ->Ω (0-8)
式中p 表示静子或畸变引起的空间谐波数,当上式成立时即满足截止条件。
上述“截止”条件说明,即使是亚音叶尖速度的风扇/压气机或涡轮,也可能产生传播模态。“截止”条件在现代叶轮机声学设计中起着十分重要作用,仅仅通过合理选择转子和静子叶片数目,就可获得可观的降噪效果。Tyler 和Sofrin 这一重要发现已成为当今风扇/压气机设计必须考虑的一个重要因素。
2.3 影响单音截止设计的因素
模态分析的目的在于合理的选择转子和静子叶片数目,使得叶片通过频率下转静干涉产生的单音噪声在管道中被“截止”。对于被“截止”的非传播模态,声波的衰减率是由方程(2-4)中的传播项决定,应用式(2-8)就可以重写成,
m ik x e e e μ---== (0-9)
当m M 小于于m M *时,则传播项就变成阻尼项的形式,
xmn ik x e e -= (0-10)
由上式可以明显看出,模态是随离声源的距离x 而衰减(消失模态evanescent modes )。Tyler & Sofrin (1962)计算了空心圆形管道和环形管道中不同阶数m
模态的每管道半径长度的声压级衰减率(0/(/)8.69db x r ??=,计
算结果如图2-7所示。对于所有的管道形式,一般地,周向模态阶数m 越高,模
态幅值衰减的就越快,临界马赫数mn Ma *越小。
(a) 轮毂比σ=0 (b) 轮毂比σ
=0.25
(c)轮毂比σ=0.50 (d) 轮毂比σ=0.75
图 2- 4圆形或环形管道各模态衰减率(Tyl er & Sofrin (1962))
对给定的通道内外径,周向模态数较小的声波总是更容易向外传播,选择转子与静子叶片数的原则就是使产生的最小周向模态声波满足“截止”条件。与风扇不同,大涵道比涡扇发动机低压涡轮通常叶片数都很多,可达100-150左右,且转静子叶片数目之比接近1,这样根据式(2-6),最小的周向模态通常出现在k=1时。因此在低压涡轮中,单音截止设计
就是使转静叶片数目之差足够大,而转子叶
片数越小,满足截止设计的这个“差值”越
小。
图2-7结果还表明,环形管道轮毂比越
大,临界马赫数mn Ma *就越小,也就是说通
道外径固定时,相比圆形管道,声波在环形
管道中更容易被截止。图2-8给出的不同周
向模态阶数m 下临界马赫数与轮毂比的关系可以更清楚的看到这一趋势,且σ越小临界马赫数变化越慢。同时注意到m 越大,临界马赫数的变化范围越小,当m ≥32时,这一范围已不到0.05。
图 2- 5 临界马赫数随轮毂比的变化
从式(2-5)中轴向波数的表达式可以看到,主流马赫数也会影响管道中声波截止。考虑管道中主流的影响,临界马赫数重新定义如下:
M*=(0-11)
m
通道主流马赫数越大,临界马赫数越小,意味着主流对转静干涉声波有“阻碍”作用,高马赫数下干涉单音更容易被截止。尽管如此,为了使单音截止设计不因发动机运行工况的改变而失效,在进行单音截止设计时通常认为背景主流马赫数为0。
除了上述因素外,影响管道中声波截止的还有转速、通道外径和当地声速。其中转速的影响是显而易见的,其它条件不变的情况下,转速越高,叶尖周向马赫数越高,会有更多的高阶周向模态“跨过”截止边界成为强烈的声源。通道外径的影响与转速相似,更大的半径意味着更高的叶尖周向马赫数。当地声速越大则叶尖周向马赫数越小,声波更容易被截止,从这一点上讲,涡轮中的截止设计较压气机中容易。
管道声模态测量所需麦克风个数确定
假如需要测量的周向模态阶数为m,径向模态阶数为n,则沿周向至少均匀布置2m个麦克风,每一个周向位置沿径向均匀布置2n个麦克风,一共是4m*n个麦克风。这是传统的测量方法,当模态阶数比较高时,需要大量的麦克风。
为了减少麦克风个数,可以使用可旋转探针杷装置,如下图所示:
探针杷结构示意图
模态分析意义
模态分析意义模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息变化。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与胯动响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。近十多年来,由于计算机技术、
FFT 分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析得到了很快的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。已有多种档次、各种原理的模态分析硬件与软件问世。在各种各样的模态分析方法中,大致均可分为四个基本过程:(1)动态数据的采集及频响函数或脉冲响应函数分析1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。2)数据采集。SISO 方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振形数据。SIMO 及MIMO 的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。(2)建立结构数学模型根据已知条件,建立一种描述结构状态及特性的模型,作为计算及识别参数依据。目前一般假定系统为线性的。由于采用的识别方法不同,也分为频域建模和时
白车身模态分析试验方法研究 毕业设计
目录 中文摘要 (1) 英文摘要 (2) 1 绪论 (3) 2 试验模态分析 (5) 2.1模态试验理论 (5) 2.2试验测试系统组成 (6) 3 模态参数识别方法 (7) 3.1模态参数识别主要方法 (7) 3.2最小二乘复频域法 (9) 3.2.1最小二乘复频域法简介 (9) 3.2.2系统模型的确定 (9) 4 白车身模态试验 (10) 4.1白车身参数 (10) 4.2试验结构的支撑方式 (10) 4.3传感器的选择及布置原则 (12) 4.4激励系统 (13) 4.4.1激励方式 (13) 4.4.2振动激励源的选择和比较 (14) 4.4.3设备传感器 (15) 4.5试验测试系统检验 (16) 5 试验测试结果及分析 (21) 5.1稳态图 (21) 5.2模态频率与阻尼比 (23) 5.3模态振型 (24) 5.4模态试验的有效性 (26) 6 有限元分析结果与试验结果对比 (30) 结论 (33) 谢辞 (34) 参考文献 (35)
白车身模态试验方法研究 摘要:本文的目的在于研究模态分析参数识别不同方法之间的优缺点,重点是PolyMAX法和时域分析法之间的对比,以研究通过何种方法才能获得精 确地实验数据。为此本文分别采用多参考最小二乘复频域(PolyMAX) 法和时域分析法对结构模态参数进行识别,得到白车身各阶的模态图、 模态频率和振型并采用模态置信判据法(MAC)验证试验结果,比较二者 之间的优缺点,从而发现PolyMAX能提供比时域法法更多的稳定极点 并且有一个清晰地图标,确保一个用户独立和简洁明了的解释,大量简 化了鉴别过程。为进一步验证PolyMAX法的准确性,将PolyMAX分析 结果与有限元分析相对比,发现两者具有相当高的一致性。因此,本文 认为在白车身模态试验中PolyMAX法是最佳的试验模态分析方法。 关键词:白车身模态试验分析方法MIMO PolyMAX 1
模态分析实验报告
模态分析实验报告 姓名: 学号: 任课教师: 实验时间: 指导老师: 实验地点:
实验1 传递函数的测量 一、实验内容 用锤击激振法测量传递函数。 二、实验目的 1)掌握锤击激振法测量传递函数的方法; 2)测量激励力和加速度响应的时间记录曲线、力的自功率谱和传递函数; 3)分析传递函数的各种显示形式(实部、虚部、幅值、对数、相位)及相干函 数; 4)比较原点传递函数和跨点传递函数的特征; 5)考察激励点和响应点互换对传递函数的影响; 6)比较不同材料的力锤锤帽对激励信号的影响; 三、实验仪器和测试系统 1、实验仪器 主要用到的实验仪器有:冲击力锤、加速度传感器,LMS LMS-SCADAS Ⅲ测试系统,具体型号和参数见表1-1。 仪器名称型号序列号灵敏度备注 数据采集和分析系统LMS-SCADAS Ⅲ比利时力锤2302-10 3164 2.25 mV/N 加速度传感器100 mV/g 丹麦B&K 表1-1 实验仪器 2 、测试系统 利用试验测量的激励信号(力锤激励信号)和响应的时间历程信号,运用数字信号处理技术获得频率响应函数(Frequency Response Function, FRF),得到系统的非参数模型。然后利用参数识别方法得到系统的模态参数。测试系统主要完成力锤激励信号及各点响应信号时间历程的同步采集,完成数字信号的处理和参数的识别。 测量分析系统的框图如图1-1所示。测量系统由振动加速度传感器、力锤和比利时LMS公司SCADAS采集前端及Modal Impact测量分析软件组成。力锤及加速度传感器通过信号线与SCADAS采集前端相连,振动传感器及力锤为ICP
模态分析理论
模态分析理论 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
模态分析指的是以振动理论为基础、以模态参数为目标的分析方法。首先建立结构的物理参数模型,即以质量、阻尼、刚度为参数的关于位移的振动微分方程;其次是研究其特征值问题,求得特征对(特征值和特征矢量),进而得到模态参数模型,即系统的模态频率、模态矢量、模态阻尼比、模态质量、模态刚度等参数。 特征根问题 以图3所示的三自由度无阻尼系统为例,设123m =m =m =m ,123k =k =k =k , 图三自由度系统 其齐次运动方程为: mz?+kz =0(8) 其中m ,k 分别为系统的质量矩阵和刚度矩阵, 12 3m 00m 00m=0m 0=0m 000m 00m ????????????????????,1 12 1222 1k -k 0k -k 0k=-k k +k -k =-k 2k -k 0 -k k 0-k k ???? ???????????????? ,则运动方程展开式为: ¨1 1¨22¨33z m 00k k 0z 00m 0z k 2k k z 000m 0k k z 0z ?? ??-???????? ??????????+--=????????????????????-???????????? (9) 定义主振型 由于是无阻尼系统,因此系统守恒,系统存在振动主振型。主振型意味着各物理坐标振动的相位角不是同相(相差0o )就是反相位(相差180o ),即同时达到平衡位置和最大位置。主振型定义如下: ()i i j ωt+i i sin ωt+=Im(e )φφi mi mi z =z z (10)
结构模态分析方法
模态分析技术的发展现状综述 摘要:本文首先系统的介绍了模态分析的定义,并以模态分析技术的理论为基础,查阅了大量的文献和资料后,介绍了三种模态分析技术在各领域的应用,以及国内外对于结构模态分析技术研究的发展现状,分析并总结三种模态分析技术的特点与发展前景。 关键词:模态分析技术发展现状 Modality Analysis Technology Development Present Situation Summary Abstract:This article first systematic introduction the definition of modality analysis,and based on modal analysis theory,after has consulted the massive literature and the material.Introduced application about three kind of modality analysis technology in various domains. At home and abroad, the structural modal analysis technology research and development status quo.Analyzes and summarizes three kind of modality analysis technology characteristic and the prospects for development. Key words:Modality analysis Technology Development status 0 引言 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。模态分析的过程如果是由有限元计算的方法完成的,则称为计算模态分析;如果是通过试验将采集的系统输入与输出信号经过参数识别来获得模态参数的,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。 1 数值模态分析的发展现状 数值模态分析主要采用有限元法,它是将弹性结构离散化为有限数量的具体质量、弹性特性单元后,在计算机上作数学运算的理论计算方法。它的优点是可以在结构设计之初,根据有限元分析结果,便预知产品的动态性能,可以在产品试制出来之前预估振动、噪声的强度和其他动态问题,并可改变结构形状以消除或抑制这些问题。只要能够正确显示出包含边界条件在内的机械振动模型,就可以通过计算机改变机械尺寸的形状细节。有限元法的不足是计算繁杂,耗资费时。这种方法,除要求计算者有熟练的技巧与经验外,有些参数(如阻尼、结合面特征等)目前尚无法定值,并且利用有限元法计算得到的结果,只能是一个近似值。 正因如此,大多数数学模拟的结构,在试制阶段常应做全尺寸样机的动态试验,以验证计算的可靠程度并补充理论计算的不足,特别对一些重要的或涉及人身安全的结构,就更是如此。 70 年代以来,由于数字计算机的广泛应用、数字信号处理技术以及系统辨识方法的发展 , 使结构模态试验技术和模态参数辨识方法有了较大进展,所获得的数据将促进产品性能的改进、更新[1] 。在硬件上,国外许多厂家研制成功各种类型的以FFT和
模态分析软件操作
模态分析软件操作说 明及实例 东方振动和噪声技术研究所 1999.3.16 目录 一模态分析的步骤 (2) 1.确定分析的方法 (2) 2.测点的选取、传感器的布置 (2) 3.仪器连接 (3) 4.示波 (3) 5.输入标定值 (3) 6.采样 (4) 7.传递函数分析 (4) 8.进行模态分析 (4) 二模态分析实例 (5)
例一自由梁的模态分析实例 (5) 例二楼房的模态分析实例 (15) 模态分析是一种参数识别的方法,因为模态分析法是在承认实际结构可以运用所谓“模态模型”来描述其动态响应的条件下,通过实验数据的处理和分析,寻求其“模态参数”。 模态分析的关键在于得到振动系统的特征向量(或称特征振型、模态振型)。试验模态分析便是通过试验采集系统的输入输出信号,经过参数识别获得模态参数。具体做法是:首先将结构物在静止状态下进行人为激振(或者环境激励),通过测量激振力与振动响应,找出激励点与各测点之间的“传递函数”,建立传递函数矩阵,用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构的模态参数,从而建立起结构物的模态模型。 东方所研制的模态分析系统,自推出以来参与了许多重大的科研项目如大型航空航天设备(长征火箭、通信卫星、大型雷达、火箭发射平台等)、大桥(火箭激振钱塘江大桥、锤击法激振乌海黄河铁路大桥属国内首次)、大楼、大坝、、机车(汽车)车辆和大型港口机械等,分析精度高、操作简便,尤其是变时基模态分析及高速模态三视图动画技术更是在国内外处于领先地步。 一、模态分析的步骤 1. 确定分析的方法 DASP中提供的模态分析方法有多输入单输出法、单输入多输出法和多输入多输出方法。一般采用较多的是多输入单输出或单输入多输出方法,在这两种方法中选取时,视哪一种方法简便而定,如激励装置大、不好移动但传感器移动方便就选取单输入多输出方法(即单点激励、多点移步拾振);如传感器移动不方便但激励装置小、容易移动就选取多输入单输出方法(即单点拾振、多点移步激励)。 有时结构因为过于巨大和笨重,以至于采用单点激振时不能提供足够的能量,将我们所感兴趣的模态都激励出来;其次,结构在同一频率时可能有多个模态,这样单点激振就不能把它们分离出来,这时就要采取两个甚至多个激励来激发结构的振动,即采取多输入多输出方法。 在DASP中进行模态分析时,由于采用了高弹性聚能力锤和先进的变时基传递函数分析技术,对于象大型铁路桥、火箭发射平台这样的大型结构用力锤敲击就能分析出结构的模态;对于大型的混凝土结构(如大楼)可以以天然脉动作为激励信号进行模态分析。所以在大多数情况下,采取单输入多输出或多输入单输出方法就可完全满足工程需要。 2. 测点的选取、传感器的布置 选择好分析方法后,就要根据结构的特点和试验目的确定测点的数目和布置,以及传感器的安装方法等。
机床实验模态分析综述
机床的模态分析方法综述 甄真 (北京信息科技大学机电工程学院,北京100192) 摘要:模态分析是研究机械结构动力特性的一种近代方法,是结构动态设计及设备的故障诊断的重要方法。机床在工作时,由于要承受各种变载荷而产生振动,其精度和寿命会受到影响。因此有必要对机床进行模态分析,了解其动态特性,以便进一步分析和改进。本文概述了模态分析的概念、研究意义及发展历史,介绍了机床模态分析的研究现状, 从理论方法与试验方法两方面指出了其关键技术以及研究发展方向。 关键词:模态分析;动态特性;机床;理论方法;实验方法 Summary of the model analysis method of machine tool ZHEN Zhen (Beijing Information Science & Technology University, Mechanical and Electrical Engineering College, Beijing, 100192) Abstract:Modal analysis is a modern method to study the dynamic characteristics of mechanical structure. It’s an important method in structure dynamic design and fault diagnosis of equipment.Its accuracy and lifetime will be affected due to withstand all kinds of variable load and vibration when the machine tool works.So it is necessary to make modal analysis and to understand the dynamic characteristics for machine tool in order to further analyze and improve. This paper summarizes the concept, significance and history of modal analysis and introduces the research status of model analysis of machine tool. It also points out the key technology and research direction in this field from two aspects of theoretical method and experimental method. Key words:model analysis; dynamic characteristics; machine tool; theoretical method; experimental method 0 引言 模态是指机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。模态分析是一种研究机械结构动力的方法,是系统辨别方法在工程振动领域中的应用。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可预言结构在此频段内在外部或内部各种振源作用下实际响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法[1]。 模态分析将构件的复杂振动分解为许多简单而独立的振动,并用一系列模态参数来表征的过程。根据线性叠加原理,一个构件的复杂振动是由无数阶模态叠加的结果。在这些模态中。模态分析最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。模态分析主要分为3类方法:一是,基于计算机仿真的有限元分析法;二是,基于输入(激励)输出(响应)模态试验的试验模态分析法;三是,基于仅有输出(响应)模态试验的运行模态分析法。有限元分析属结构动力学正问题,但受无法准确描述复杂边界条件、结构物理参数和部件连接状态等不确定性因素的限制难以达到很高的精度。第二、三类方法属结构动力学反问题,基于真实结构的模态试验。因而能得到更准确
模态分析与振动测试技术
模态分析与振动测试技术 固体力学 S0902015 李鹏飞
模态分析与振动测试技术 模态分析的理论基础是在机械阻抗与导纳的概念上发展起来的。近二十多年来,模态分析理论吸取了振动理论、信号分析、数据处理数理统计以及自动控制理论中的有关“营养”,结合自身内容的发展,形成了一套独特的理论,为模态分析及参数识别技术的发展奠定了理论基础。 一、单自由度模态分析 单自由度系统是最基本的振动系统。虽然实际结构均为多自由度系统,但单自由度系统的分析能揭示振动系统很多基本的特性。由于他简单,因此常常作为振动分析的基础。从单自由度系统的分析出发分析系统的频响函数,将使我们便于分析和深刻理解他的基本特性。对于线性的多自由度系统常常可以看成为许多单自由度系统特性的线性叠加。 二、多自由度系统模态分析 对于多自由度系统频响函数数学表达式有很多种,一般可以根据一个实际系统来讨论,给出一种形式;也可根据问题的要求来讨论,给出其他不同的形式。为了课程的紧凑,直接联系本课程的模态分析问题,我们就直接讨论多自由度系统通过频响函数表达形式的模态参数和模态分析。即多自由度系统模态参数与模态分析。 多自由度系统模态分析将主要用矩阵分析方法来进行。 我们以N个自由度的比例阻尼系统作为讨论的对象。然后将所分析的结果推广到其他阻尼形式的系统。 设所研究的系统为N个自由度的定常系统。其运动微分方程为: (2—1) ++= M X CX KX F ?)阶式中M,C,K分别为系统的质量、阻尼及刚度矩阵。均为(N N 矩阵。并且M及K矩阵为实系数对称矩阵,而其中质量矩阵M是正定矩阵,刚度矩阵K对于无刚体运动的约束系统是正定的;对于有刚体运动的自由系统则是半正定的。当阻尼为比例阻尼时,阻尼矩阵C为对称矩阵(上述是解耦条件)。 N?阶矩阵。即 X及F分别为系统的位移响应向量及激励力向量,均为1
模态分析中的几个基本概念模态分析中的几个基本概念分析
模态分析中的几个基本概念 物体按照某一阶固有频率振动时,物体上各个点偏离平衡位置的位移是满足一定的比例关系的,可以用一个向量表示,这个就称之为模态。模态这个概念一般是在振动领域所用,你可以初步的理解为振动状态,我们都知道每个物体都具有自己的固有频率,在外力的激励作用下,物体会表现出不同的振动特性。一阶模态是外力的激励频率与物体固有频率相等的时候出现的,此时物体的振动形态叫做一阶振型或主振型;二阶模态是外力的激励频率是物体固有频率的两倍时候出现,此时的振动外形叫做二阶振型,以依次类推。一般来讲,外界激励的频率非常复杂,物体在这种复杂的外界激励下的振动反应是各阶振型的复合。模态是结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。有限元中模态分析的本质是求矩阵的特征值问题,所以“阶数”就是指特征值的个数。将特征值从小到大排列就是阶次。实际的分析对象是无限维的,所以其模态具有无穷阶。但是对于运动起主导作用的只是前面的几阶模态,所以计算时根据需要计算前几阶的。一个物体有很多个固有振动频率(理论上无穷多个),按照从小到大顺序,第一个就叫第一阶固有频率,依次类推。所以模态的阶数就是对应的固有频率的阶数。振型是指体系的一种固有的特性。它与固有频率相对应,即为对应固有频率体系自身振动的形态。每一阶固有频率都对应一种振型。振型与体系实际的振动形态不一定相同。振型对应于频率而言,一个固有频率对应于一个振型。按照频率从低到高的排列,来说第一振型,第二振型等等。此处的振型就是指在该固有频率下结构的振动形态,频率越高则振动周期越小。在实验中,我们就是通过用一定的频率对结构进行激振,观测相应点的位移状况,当观测点的位移达到最大时,此时频率即为固有频率。实际结构的振动形态并不是一个规则的形状,而是各阶振型相叠加的结果。 固有频率也称为自然频率( natural frequency)。物体做自由振动时,其位移随时间按正弦或余弦规律变化,振动的频率与初始条件无关,而仅与系统的固有特性有关(如质量、形状、材质等),称为固有频率,其对应周期称为固有周期。 物体做自由振动时,其位移随时间按正弦规律变化,又称为简谐振动。简谐振动的振幅及初相位与振动的初始条件有关,振动的周期或频率与初始条件无关,而与系统的固有特性有关,称为固有频率或者固有周期。 物体的频率与它的硬度、质量、外形尺寸有关,当其发生形变时,弹力使其恢复。弹力主要与尺寸和硬度有关,质量影响其加速度。同样外形时,硬度高的频率高,质量大的频率低。一个系统的质量分布,内部的弹性以及其他的力学性质决定 模态扩展是为了是结果在后处理器中观察而设置的,原因如下: 求解器的输出内容主要是固有频率,固有频率被写到输出文件Jobname.OUT 及振型文件Jobnmae.MODE 中,输出内容中也可以包含缩减的振型和参与因子表,这取决于对分析选项和输出控制的设置,由于振型现在还没有被写到数据库或结果文件中,因此不能对结果进行后处理,要进行后处理,必须对模态进行扩展。在模态分析中,我们用“扩展”这个词指将振型写入结果文件。也就是说,扩展模态不仅适用于Reduced 模态提取方法得到的缩减振型,而且也适用与其他模态提取方法得到的完整振型。因此,如果想在后处理器中观察振型,必须先扩展模态。谱分析中的模态合并是因为激励谱是其实是由一系列的激励组合成的一个谱,里面的频率不会是只有一个,而不同的激励频率对于结构产生的结果是不一样的,对于结果的贡献也是不一样的,所以要选择模态组合法对模态进行组合,得到最终的响应结果。
振动测试和分析技术综述分析解析
振动测试和分析技术综述 黄盼 (西华大学,成都四川 610039) 摘要:振动测试和分析对结构和系统动态特性分析及其故障诊断是一种有效的手段。综述了当前振动测试和分析技术,包括振动测试与信号分析的国内外发展概况、振动信号数据采集技术、振动测试技术、以及振动测试与信号分析的工程应用,最后对振动测试与分析技术的未来发展方向进行了展望。 关键词:振动测试; 信号分析; 动态特性; 综述 Summary of Vibration Testing and Analysis HuangPan ( Xihua University,Chengdu 610039,China) Abstract: Vibration testing and analysis is an effective tool in analyzing structure and system dynamic characteristic and detecting the failures of structures,systems and facilities. The present paper reviews the current vibration testing and analysis techniques,including the development of vibration measurement and analysis of domestic and foreign,vibration signal data acquisition,vibration testing technology ,vibration measurement and analysis in engineering application. Finally,the future development in the field of vibration testing and analysis is predicted. Key words: vibration testing; signal analysis; dynamic characteristic;overview
运用hypermesh进行模态分析
1 引言 系统的模态参数(模态频率、模态阻尼、振型)对系统的动态分析和优化设计具有实用价值。通常由试验模态分析和计算模态分析两种方法。但由于受实验条件和时间的限制,组织实施往往比较困难,而且在测量次数,测量数据的处理准确性方面也难以得到充分的保证,在设计阶段难以实现。基于虚拟样机技术的虚拟实验方法在履带车辆箱体类零部件模态参数测量方面在设计阶段就能为方案优化提供指导,缩短产品开发周期,节省费用。因此,开展在虚拟环境下测试箱体类零部件的模态参数研究与探讨并扩展其应用具有重要意义。本文以某型履带车辆传动箱设计为例,应用HyperMesh为前处理软件,对其进行了有限元网格的划分,进而对箱体的模态进行了分析。 2 箱体有限元模型的建立及模态分析 首先依据传动箱体的尺寸,建立箱体的三维实体模型。利用HyperMesh对传动箱体的实体模型进行有限元网格划分,箱体的材料为铝合金,其密度为 2.66e33kg/m3,泊松系数为0.31,杨氏模量为7.7e72N/m2,强度极限为176.4MPa。整个箱体共划分76151个4面体单元,22262个节点。在此过程中,还必须考虑到箱体有限元模型建立后与各传动轴之间的连接,即柔性体与刚体间的连接。传动箱各轴都是通过轴承与箱体连接的,笔者在有限元模型中应用多点约束(MPC,Multi-point Constraint)来模拟轴承的作用。所谓多点约束是将某节点的依赖自由度定义为其他若干节点独立自由度的函数。多点约束可以用于不相容单元间的载荷传递,表征一些特定的物理现象,比如刚性连接、铰接、滑动等。笔者在箱体有限元模型中各轴孔的中心点处建立一个虚拟杆单元,如图1所示。轴孔内表面各节点的自由度则依赖于对应的虚拟杆单元。各传动轴与箱体间的约束也是在对应的虚拟单元处建立,各传动轴上的作用力则通过相应的虚拟杆单元和多点约束作用于箱体之上。文中建立的包括轴承模型的传动箱箱体有限元模型如图2所示。
Abaqus模态分析实验报告
(一)创建部件 1:模块:部件 2:从菜单栏中选择部件→创建,弹出创建部件对话框 名称:LIAN_FuJian 模型空间:三维 类型:可变形 形状:实体 类型:拉伸 大约尺寸:2000,为部件最大尺寸的2倍 3:点击继续,进入草绘模式,为实体拉伸绘制截面草图。4:点击创建圆工具,绘制2个同心圆。大圆直径为1000,小圆直径为400。 5:点击创建构造:圆工具,绘制一个直径为700的构造圆。 6:点击创建构造工具,创建2条构造线,一并添加固定约束。 7:点击创建圆工具,以构造圆与竖直构造线的交点为圆心,绘制一个直径为100的圆。
8:点击环形阵列工具,点选刚才创建的圆为要阵列的实体,按下鼠标中键,弹出环形阵列对话框 个数:6 总角度:360 点击确定 阵列结果如下: 9:在绘图区按下鼠标中键,弹出编辑基本拉伸对话框 类型:指定深度 深度:200 点击确定,第一个部件绘制完成 10:创建第二个部件-轴:ZHOU。 (二)装配 1:模块:装配 2:点击创建实例工具,弹出创建实例对话框 创建实例:从部件 部件:按住Ctrl选取LIAN_FuJian与ZHOU这2个部件 实例类型:非独立(网格在部件上)
点击确定,装配体如下 2:点击平移实例工具,选择ZHOU为要平移的实例,点击完成。输入平移向量的起始点(0,0,0),回车;输入平移向量的终点(0,0,100),回车。再点击确定,平移后的装配体如下 3:点击合并/切割实例工具,弹出合并/切割实体对话框。部件名:ASM 运算:合并-几何 原始实体:禁用 相交边界:删除 点击继续,选择待合并的实例,框选整个模型,点击完成。4:在模型树下删除LIAN_FuJian-1和ZHOU-1 5:由于在接下来的分析中只需要用到ASM部件,故可以将LIAN_FuJian和ZHOU删除。 模块:部件 点击部件管理器工具,选中LIAN_FuJian和ZHOU,删除。
模态分析在工程中的应用概述
模态分析在工程中的应用概述 学号:XXXXXX 姓名:XXX 模态分析是研究结构动力特性的一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析(FEA);如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为实验模态分析(EMA)。通常,模态分析都是指实验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析所寻求的最终目标在于改变机械结构系统由经验与类比和静态设计为动态、优化设计方法;在于借助试验与理论分析相结合的方法,对已有结构系统进行识别、分析和评价,从中找出结构系统在动态性能上所存在的问题,确保工程结构能安全可靠及有效地工作;在于根据现场测试的数据来这段及预报振动故障和进行噪声控制。通过这些方法为老产品的改进和新产品的设计提供可靠的依据。[1] 模态分析是一项综合性技术,可以应用于各个工程部门及各种工程结构。机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息万变。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速Fourier 变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对实验导纳函数的曲线拟合,识别出结构物体的模态参数,从而建立起结构物体的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物体的实际振动的响应历程或响应谱。[2] 模态分析技术的应用可以归纳为以下几个方面:评价现有结构系统的动态特性,在新产品设计中进行结构动态特性的预估及优化设计,诊断及预报机构系统的故障,控制结构的辐射噪声,识别结构系统的载荷。[1] 下面对近几年国内模态分析在工程中各个方面的应用分别进行概述。 1.评价现有结构系统的动态特性 在处理结构的振动问题时,必须对其动态特性有全面的了解,而其动态特性
模态分析理论应用实际的讨论
模态分析理论应用实际的讨论 模态分析在结构设计中的应用认识小结 在结构设计中,我们通常要运用模态分析的方法来辅助设计,提高结构设计的合理性和科学性。模态参数获取有两种方法: 一种是有限元法,一般的FEA软件都可以计算,WB当然也没有问题拉; 一种是测试的方法,比如用LMS https://www.360docs.net/doc/738722760.html,b来测试。 这两种方法对于测试简单的结构是没有问题的,分析结果和试验结果很吻合。但是对于复杂的装配体结构,FEA软件就显得无能为力了,因为装配体有令人讨厌的结合面,对于结合面的分析,据我所知目前还没有比较好的办法(就算是最高的CAE高手恐怕也算不准)。所以复杂装配体的模态一般用测试的方法解决。当然CAE工程师可以用实验数据得到的结合面刚度阻尼值来修正自己的有限元模型。 一般模态分析的结果中,最受关注的是固有频率值及其振型。固有频率主要用以对照结构外的激振频率,看是否出现共振,共振出现的后果很严重,它会使设备的加工精度降低很多,另外固有频率值是衡量结构动静刚度的标杆,如果我想提高结构的动静刚度,不断改变自己设计的结构一般就能实现,当然设计水平也很重要;而通过观察振型我可以判断这个振型是否影响我设备的加工精度,如果影响的话,我会考虑将改变这个振型的频率,避免实际生产中出现加工精度降低的情况。模态分析在CAE中应该很简单,算出固有频率和振型也很轻松。但是如何在设计中运用好这个工具其实有很多学问。对于振型而言,可能不同的领域关注的焦点可能会不一样。以机床为例,如果计算机床的床身模态振型,可能振型有弯曲,扭转等众多振型,如果存在机床进刀、加工方向的振型,那么有可能这些振型会影响机床的加工精度。那么在设计阶段就必须对结构进行调整,比如修改结构内部的肋板分布,提高影响加工精度振型的固有频率,减少发生共振进而影响机床加工精度的可能性。我的看法是,振型模态分析要和结构强度刚度分析结合在一起,强度分析结果的高应力区如果和某一阶模态振型位移较大区域重合,就可认为结构是偏危险的,这些高应力区域有可能就是疲劳裂纹的萌生位置,而实际中的连续结构体振型应该是无穷多的,经典理论认为实际工程中能够对结构安全产生影响的往往只是低阶的频率振型,所以只要结构避开低阶共振区就能安全运行,然而随着结构形式运行条件等因素的不断变化,现代机械的振动形式也越来越复杂,除了静态强度刚度,动态强度刚度也越来越重要,在水中的湿模态分析,目前似乎还没有完美简洁的解决办法,计算分析所采用的模型和计算条件与实际运行中结构之间的差异会直接影响计算结果的精度,所以如何减小这个差异,或者说如何使分析过程更加接近实际是一直以来我们的目标。 模态分析中经常遇到的问题就是当分析对象为装配体的时候。装配体模态计算的正确性绝不仅仅在熟悉产品这么简单,尤其是类似于螺栓结合面、导轨结合面的地方,关于结合面的研究老早就到了一个瓶颈了,由于结合部特性参数的影响因素众多,如结合面材料、加工方法和表面质量,结合面介质及其性质,结合面几何形状及法面压力大小等,特别是在结合部作用机理尚未被真正揭示之前,要在理论上精确获得结合部的特性参数及其分析计算表达式非常困难,故用有限元法识别精度还有待验证。 结合部动力学参数识别问题的确是个技术性难题。目前解决好这一问题的手段是:测试+仿真,建立混合模型。另外对于产品的认知度问题是个值得讨论的问题,比如加强劲板形状的设计就是个问题。你是否已经能够罗列出各种简单振动模式下最好的结构形式?首先列一张表,然后你会心里有数些。但产品并非那么简单,所以需要设计复杂结构。那么,仅仅凭借模态测试是不够的,需要做结构形式的优化,那我们现有的优化技术中,拓扑优化是解决这一问题的好帮手。 曾经拿一家公司的产品,测试和计算发现他们的产品第一阶模态就到了300Hz以上,而同形式的产品,国内仅能到70几Hz.这个差距是何等的大?想办法把我们的产品也做到这样,那你就牛了。 这里谈到结构优化,我就插一句,ANSYS Workbench在分析或者说验证方面很不错,但是要涉及到拓扑优化和形貌优化则比较差,几乎不能应用到实际工程中,最多使用的尺寸优化。如果大家要做结构优化的话,建议使用一下HyperWorks/Optistruct,这个在结构优化上可以说是绝对领先的。. 还有就是共振的实际分析
有关模态分析的理解
模态分析的应用及它的试验模态分析 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模记分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析最终目标是在识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 模态分析技术的应用可归结为以下几个方面: 1) 评价现有结构系统的动态特性; 2) 在新产品设计中进行结构动态特性的预估和优化设计; 3) 诊断及预报结构系统的故障; 4) 控制结构的辐射噪声; 5) 识别结构系统的载荷。 机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息变化。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与胯动响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。 近十多年来,由于计算机技术、FFT分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析得到了很快的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。已有多种档次、各种原理的模态分析硬件与软件问世。在各种各样的模态分析方法中,大致均可分为四个基本过程: (1)动态数据的采集及频响函数或脉冲响应函数分析 1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。 2)数据采集。SISO方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振型数据。SIMO及MIMO的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。 3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。(2)建立结构数学模型根据已知条件,建立一种描述结构状态及特性的模型,作为计算及识别参数依据。目前一般假定系统为线性的。由于采用的识别方法不同,也分为频域建模和时域建模。根据阻尼特性及频率耦合程度分为实模态或复模态模型等。
模态分析的技术及应用
一、模态测试概述 结构在动力载荷作用下,总要产生一定的振动响应。而结构的振动,常常是结构损坏、环境恶化,设备的精度或可靠性降低等工程事故的主要原因。因此,研究结构的动力特性和动力强度,已日益成为结构设计的重要课题。 结构的动力特性主要取决于它的各阶固有频率、主振型和阻尼比等。这些参数也就是所谓的模态参数。如果已经有了结构的实物图或设计图纸,并掌握所有材料的力学性能数据,那么原则上可以用有限元分析等数值计算方法求出结构的模态参数。然而,由于诸方面的原因,例如:非线性因素,材料的不均匀性,阻尼机理的复杂性,在加上构件与构件、整机与基础的连接刚度难以确定等,使有限元计算的准确性(甚至于可能性)受到限制。 在本世纪六、七十年代发展起来的现代模态试验分析技术弥补了有限元分析技术的某些不足。模态试验分析与有限元分析的相互结合及相互补充,在结构优化设计和设备诊断等许多方面,都取得良好的成效。它们已经在航天、航空、车辆、船舶、机床、建筑机械、电器设备等工业部门得到极为广泛的应用。 若干年来,众多学者提出的各种模态参数识别方法,大体上可分为时域法和频域法两类。时域法是一种从时域响应数据中直接识别模态参数的方法,频域法则是在测量频响函数基础上,利用最小二乘估计萃取模态参数的方法,也有人称之为机械导纳法或传递函数法。本节将着重讨论频域法,它是目前公认的比较成熟和有效的方法。 二、传递函数和频响函数 1.传递函数和频响函数 在电路或控制系统理论中,将输出量的拉普拉斯变换与输入量的拉普拉斯变换之比定义为传递函数。如果把机械系统的激振力看作输入量,把振动的位移响应看作输出量,则机械系统的传递函数定义为 (4-54) 其中,为复变量,称为复频率,其实部和虚部常用符号和表示,即。拉普拉斯变换的定义为
机器人技术及应用
机器人技术及应用
机器人技术及应用 周贤涛 郑州大学机械学院 20150150444 一、机器人原理 机器人瓦力的原理是一种物理状态?具有一定的形态?机器人的外形究竟是什么样子?这取决于人们想让它做什么样的工作?其功能设定决定了机器人的大小、形状、材质和特征等等。 像大脑就是控制机器人的程序或指令组,当机器人接收到传感器的信息后,能够遵循人们编写的程序指令,自动执行并完成一系列的动作。控制程序主要取决于下面几种因素,使用传感器的类型和数量,传感器的安装位置,可能的外部激励以及需要达到的活动效果。动作就是机器人的活动,有时即使它根本不动,这也是它的一种动作表现,任何机器人在程序的指令下要执行某项工作必定是靠动作来完成的。 他是一个智能的机器人产,但是他的智能已经和我们人类没什么区别了。如果在现实生活中有这样的机器人的话,就完全可以代替人类来做
任何事情了。这是我的看法。下面是现在我们现实生活中智能机器人的五个组成部分,电子计算机是智能模拟的物质技术工具。它是一种自动、高速处理信息的电子机器。它采用五个与大脑功能相似的部件组成了电脑,来模拟人脑的相应功能。这五个部件是,(1) 输入设备模拟人的感受器(眼、耳、鼻等) 用以接受外来的信息。人通过输入设备将需要计算机完成的任务、课题、运算步骤和原始数据采用机器所能接受的形式告诉计算机,并经输入设备把这些存放到存贮器中。(2) 存贮器模拟人脑的记忆功能,将输入的信息存储起来,供随时提取使用,是电子计算机的记忆置。(3) 运算器模拟人脑的计算、判断和选择功能,能进行加减乘除等算术运算和逻辑运算。(4) 控制器人脑的分析综合活动以及通过思维活动对各个协调工作的控制功能,根据存贮器内的程序,控制计算机的各个部分协调工作。它是电脑的神经中枢。 (5)输出设备模拟人脑的思维结果和对外界刺激的反映,把计算的结果报告给操作人员或与外部设备联系,指挥别的机器动作。 人工智能的产生是人类科学技术进步的结