倍福(PROFIBUS)与巴赫曼(CAN)通讯连接配置

PB-B-CANopen
Beckhoff主站(Profibus)————————Bachmann从站(CAN)
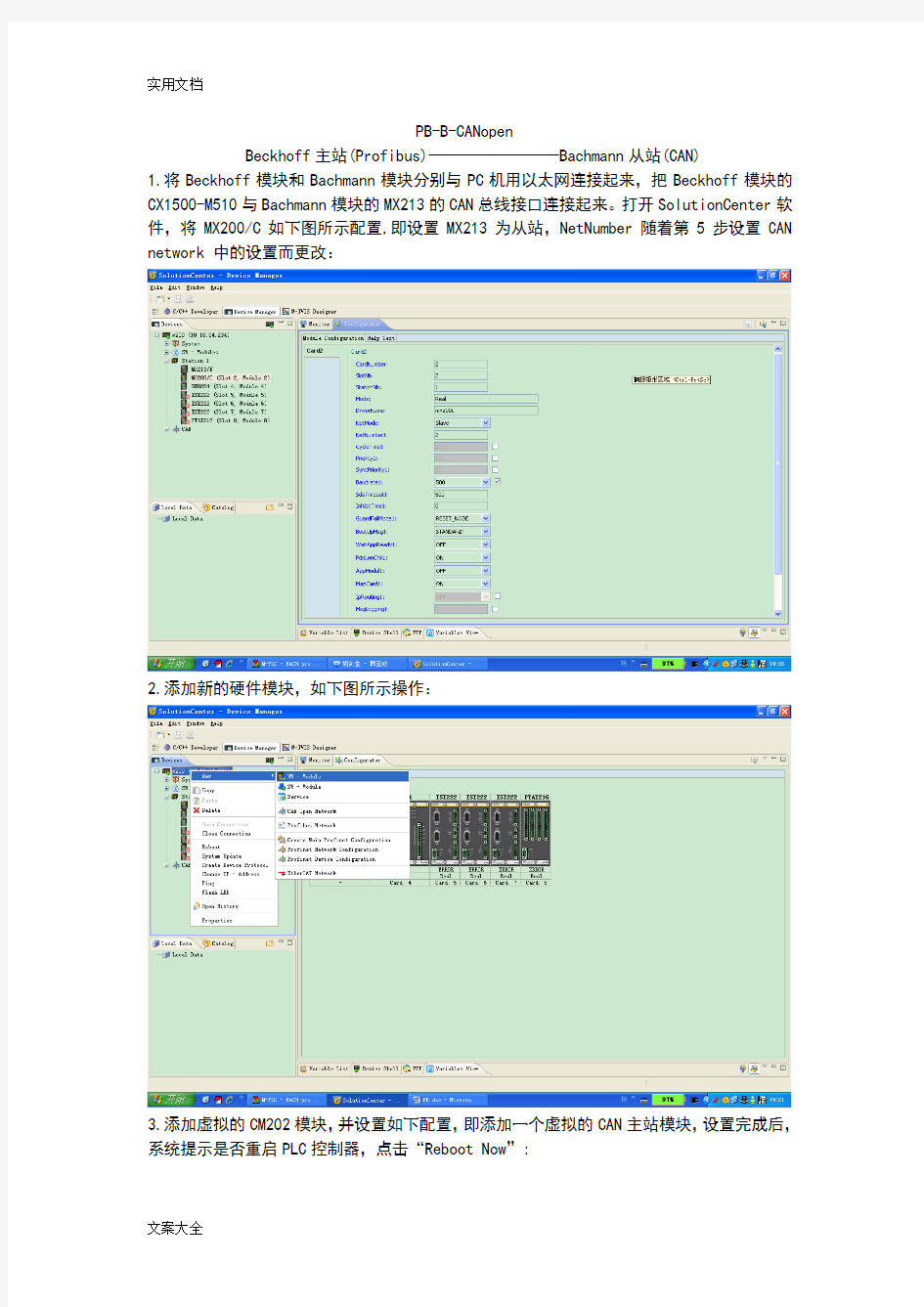
1.将Beckhoff模块和Bachmann模块分别与PC机用以太网连接起来,把Beckhoff模块的CX1500-M510与Bachmann模块的MX213的CAN总线接口连接起来。打开SolutionCenter软件,将MX200/C如下图所示配置,即设置MX213为从站,NetNumber随着第5步设置CAN network 中的设置而更改:
2.添加新的硬件模块,如下图所示操作:
3.添加虚拟的CM202模块,并设置如下配置,即添加一个虚拟的CAN主站模块,设置完成后,系统提示是否重启PLC控制器,点击“Reboot Now”:
4.如下图所示,添加了一个虚拟的“station2”站点,和CM202虚拟模块:
5.在“Local Data”中添加一个CAN网络,网络名任意填写,例如“MY_NET”点击“Next”,网络号范围为“1—8”任意选择,例如“3”,波特率设置为“500K”,然后点击“Finish”,
如下图所示:
“Catalog”中选择CM202模块,一直点击“Next”,如下图所示:
7.Node Id 选择范围为“1—64”,一般主站设置为64,从站从1开始排列选择,点击“Finish ”在“Group ”内增加了CM202模块,如下图所示:
8.同步骤6,7,添加MX2XX模块,作为第一个从站Node Id设置为1:
为MX2XX,并设置循环周期为100us,如下图所示:
10.点击“PDO connection”,创建“RxPDO”和“TxPDO”,如下图所示:
11.在“RxPDO ”和“TxPDO ”上点击右键添加变量“V1,V2,V3,V4”(注:每个PDO 下的全部变量总长为8个字节,每个变量最长为8个字节,每个模块下“RxPDO ”和“TxPDO ”最多各为64个),如下图所示:
和“TxPDO”,如下图所示:
13.在“Local Data ”区域内点击右键选择“Deploy ”,如下图选择所示;
14.打开FTP,在右边区域,选择“m200->/cfc0->APP->CAN”会出现主站的N3_D64.DCF和从站的N3_D1.DCF,,将N3_D1.DCF通过FTP下载到本地PC机的硬盘上,将然后将CAN文件
夹下的N3_D64.DCF文件删除,在出现的提示框中选择“Save”,如下图所示:
图所示:
如下图所示:
件接口扫描上来,如下图所示:
intouch与西门子OPC详解方法
一、配置STEP7 Micro/win以太网 1 2、点击下一步至如下画面:用PPI线通讯上后可读取以太网模块位置。以太网模块直接在CPU后为位置0,本项目为0 3下一步设置IP地址
4继续下一步,出现以下画面:配置TSAP地址,本项目PLC为服务器,以太网位置为0,所以本地为“10.00”,若以太网位置为1,则为“10.01”,以此类推。远程TSAP与本地不同即可。设好后点击确认。
4、确认后点击下一步出现以下画面,点击建议地址,PLC会自动分配地址。点击下一步至完成。 到此,以太网设置完成。将项目保存,用PPI线下进PLC。 插上网线,更改电脑IP地址,应可“ping”的通,设置STEP通信,将PLC IP地址填进远程,双击刷新后可找到PLC,至此,PC机与PLC连接上。
二、设置PC ACCESS 1、设置之前,先点击保存,将项目保存起来。 2、新建PLC 3、在新建的PLC下新建项目,项目即为上位机需要的变量,名称、注释可更改。 4项目建完后,点击上图属性,填进PLC的IP地址和TSAP地址,注意,此处的TSA地址顺序与设置PLC以太网时相反,即本地、远程要颠倒一下。设置完后点击确定。
5、PC ACCESS带测试客户端,如下图,选中项目,点击红圈处,可将项目移至测试端,也可拖动。再点击红圈处右边一个按钮,可打开测试端,如PC ACCESS与PLC通讯正常,显示“好”,如下图所示:
至此,PC ACCESS设置完毕。 三、intouch OPC fsgateway设置 1,装好fsgateway,打开SMC,点击下图阴影位置,将fsgateway激活(打对勾为激活)。
51单片机串口通信,232通信,485通信,程序
51单片机串口通信,232通信,485通信,程序代码1:232通信 #include
while(1) { if(flag==1) { ES=0; for(i=0;i<6;i++) { SBUF=table[i]; while(!TI); TI=0; } SBUF=a; while(!TI); TI=0; ES=1; flag=0; } } } void ser() interrupt 4 {
RI=0; a=SBUF; flag=1; } 代码2:485通信 #include
} void main() { init_1602(); init(); while(1) { if(flag==1) { display(0,a); } } } void ser() interrupt 4 { RI=0; a=SBUF; flag=1; } Love is not a maybe thing. You know when you love someone.
单片机串口通信C程序及应用实例
一、程序代码 #include
TI = 0; } T_counter = 0; } uart_receive(void) interrupt 4 { if(RI) { RI = 0; indata[R_counter] = SBUF; R_counter++; if(R_counter>=4) { R_counter = 0; flag = 1; } } } void system_initial(void) { P1M1 = 0x00; P1M0 = 0xff; P1 = 0xff; //初始化为全部关闭 temp3 = 0x3f;//初始化temp3的值与六路输出的初始值保持一致 temp = 0xf0; R_counter = 0; T_counter = 0; } void initial_comm(void) { SCON = 0x50; //设定串行口工作方式:mode 1 ; 8-bit UART,enable ucvr TMOD = 0x21; //TIMER 1;mode 2 ;8-Bit Reload PCON = 0x80; //波特率不加倍SMOD = 1 TH1 = 0xfa; //baud: 9600;fosc = 11.0596 IE = 0x90; // enable serial interrupt TR1 = 1; // timer 1 RI = 0; TI = 0; ES = 1; EA = 1; }
Intouch组态与AB PLC以太网通讯
Intouch组态与AB PLC以太网通讯 网络拓扑如下图 Intouch与RSLogix 5000软件则必不可少,最重要的是RSLink(AB软件自带的通讯组态软件RSLinx Classic Lite是没有授权的)必须是授权版的RSLinx Classic Gateway,因为只有授权版的组态后才能通讯上。此项目Intouch与AB PLC通讯用的是RSLinx Classic Gateway自带的DDE(DDE是一种动态数据交换机制(Dynamic Data Exchange,DDE)。使用DDE通讯需要两个Windows应用程序,其中一个作为服务器处理信息,另外一个作为客户机从服务器获得信息。客户机应用程序向当前所激活的服务器应用程序发送一条消息请求信息,服务器应用程序根据该信息作出应答,从而实现两个程序之间的数据交换。)用DDE作通讯一是它设置简单,实现方便,更重要是它不要需要额外的通讯软件。 首先设置通讯设备的IP地址(如上图),也可设成别的,但前两位不能变,第三位可以在0-255之间,但必须一样,第四位也是0-255之间的数,但不能重复(这点懂网络的都知道,这里不在详说)。 首先设电脑的IP地址如 图 点选更改适配器设置进入
右击本地连接---属性----TCP/IPV4-----输入电脑地址如下图,子网掩码自动生成----确定。 然后设置PLC的IP地址,打开软件RSLink设置如图 组态网络的驱动 选择EtherNet/IP Driver---点Add New生成------Close
然后打开软件设AB PLC地址:用BOOTP-DHCP Server固定IP地址. 方法;1.启动BOOTP-DHCP Server它可以自动读出你的ETHERNET网卡地址(最快的方法是用网线设置,经验) 2.填如目标IP地址,后上工具条DISABLE,记住是DISABLE 3.为确保IP地址已经被网卡"记住",请断PLC电源重新启动一次,看地址是否还在(这一步是必要的,有设完地址,PLC重新启动后丢地址的情况) 设置完后,连接网线后,点开RSLink 中RSwho 搜索设备(由于本图是离线截的,所以设备上有红叉)
Qt编写串口通信程序
Qt编写串口通信程序图文详解 (说明:我们的编程环境是windows xp下,在Qt Creator中进行,如果在Linux下或直接用源码编写,程序稍有不同,请自己改动。) 在Qt中并没有特定的串口控制类,现在大部分人使用的是第三方写的qextserialport类,我们这里也是使用的该类。我们可以去 https://www.360docs.net/doc/7413275542.html,/projects/qextserialport/files/ 进行下载,也可以去下载我上传到网上的: https://www.360docs.net/doc/7413275542.html,/bbs/read.php?tid=22847 下载到的文件为:qextserialport-1.2win-alpha.zip 其内容如下图: 我们在windows下只需要使用其中的6个文件: qextserialbase.cpp和qextserialbase.h,qextserialport.cpp和qextserialport.h,win_qextseri alport.cpp和win_qextserialport.h 如果在Linux下只需将win_qextserialport.cpp和win_qextserialport.h 换为posix_qextserialpo rt.cpp和posix_qextserialport.h即可。 第一部分: 下面我们将讲述编程的详细过程,这里我们先给出完整的程序,然后到第二部分再进行逐句分析。 1.打开Qt Creator,新建Qt4 Gui Application,工程名设置为mycom,其他使用默认选项。(注意:建立的工程路径不能有中文。) 2.将上面所说的6个文件复制到工程文件夹下,如下图。
Intouch iFIX与PLC通讯设置
目录 1PLC与Intouch软件通讯设置 (2) 1.1 利用Modbus TCP/IP协议的通讯设置 (2) 1.1.1 IO Server软件配置 (2) 1.1.2 软件编程设置 (4) Server状态监视 (5) 1.1.3 IO 1.2 利用Modbus Plus协议的通讯设置 (6) Server软件设置 (6) 1.2.1 IO 1.2.2 软件编程设置 (6) 1.3 利用Modbus协议的通讯设置 (7) Server软件设置 (7) 1.3.1 IO 1.3.2 软件编程设置 (7) 2PLC与组态王软件通讯设置 (9) 2.1 利用Modbus TCP/IP协议的通讯设置 (9) 2.1.1 工程浏览器中通讯设置(即与PLC通讯时的相关设置) (9) 2.1.2 软件编程设置 (13) 2.1.3 数据状态监视 (17) 2.2 利用Modbus Plus协议的通讯设置 (18) 2.3 利用Modbus协议的通讯设置 (18) 2.4 利用Unitelway协议的通讯设置 (19) 3PLC与iFIX软件通讯设置 (21) 3.1 利用Modbus TCP/IP协议的通讯设置 (21) 3.1.1 系统配置 (21) 3.1.2 数据库标签定义 (26) 3.1.3 软件编程 (28) 3.2 利用Modbus协议的通讯设置 (30) 4通讯注意事项 (31)
1 PLC与Intouch软件通讯设置 Intouch软件中与施耐德PLC相关的驱动只有三种:Modbus TCP/IP、Modbus Plus、Modbus。 1.1 利用Modbus TCP/IP协议的通讯设置 Server软件配置 1.1.1 IO 首先启动Intouch软件中的IOServer软件(软件与Intouch软件不同时提供,除非盗版):Modicon MODBUS Ethernet软件,见下图所示: IO Server软件选择画面 Server配置 软件启动后,点击Configure->Server Settings…菜单,见下图所示: 在弹出对话框中主要设置两个参数: Protocol Timer Tick:该时间必须是最快刷新数据所需时间的2~4倍; Start automatically as Windows NT Service:如需系统启动后,该IO Server驱动自动运行时,可以选中。 注意: 上述设置在下次启动时自动生效。 Server Settings设置画面 主题名配置 点击Configure->Topic Definition…菜单,见下图所示:
java串口通讯程序
java串口通讯程序 1、下载java Communications api开发包。| 是Sun公司提供的,用于开发平台独立的通讯应用程序的扩展API。 2、将拷贝入C:\j2sdk1.4.2_04\bin 3、将拷贝入C:\j2sdk1.4.2_04\jre\lib\ext 4、将拷贝入C:\j2sdk1.4.2_04\jre\lib 5、编译文件 import .*; import .*; import .*; public class CommTest{ public static void main(String[] args){ SerialPort serialPort=null; DataOutputStream doutput=null; InputStream inputStream; CommPortIdentifier portId=null; String messageString="hello \n"; try{ portId=("COM1"); }catch(NoSuchPortException ne) { "ne"); (); } try{ serialPort=(SerialPort) ("TestComm", 5); OutputStream output = (); doutput=new DataOutputStream(output); inputStream = (); }catch(PortInUseException ex) { "ex"); (); }catch(IOException ie) { "ie"); (); //(); } try { (9600, , , ; } catch (UnsupportedCommOperationException e) {} } try { ()); } catch (IOException e) {}
Intouch非常实用的总结
INTOUCH非常有用的使用总结 intouch授权: 授权文件wwsuite.lic放在C:\Program Files\Common Files\ArchestrA\License。 intouch时间日期设置: intouch系统变量中时间日期是模拟量,不能很好的显示时间和日期,只有两种方式显示 ⑴、单独的时+分+秒显示。 ⑵、调用向导,选择时钟中的组合控件。 DA/IO Server的区别? 两个驱动都可以。详细的以后补充。 其实是IO SERVER好用,IOSERVER的效率比DASERVER好,DASERVER只是为了方便集成到IAS平台,新作的一种IO开发方式。 以太网通讯还是用DAServer,配置很简单,比ioserver好用。 wwclint的作用? 用来测试SMC通讯配置是否正确。需要连接实际的硬件才能进行测试。 用户的配置? 特别-->安全性-->配置用户:依次输入要添加的用户名、口令、访问级别,再点击“添加”按钮就又“申请”了一个用户。 如果“配置用户”选项是灰色的不可用状态,那是因为你还没有以管理员身份登陆,登陆后就可以点击此选项了。将安全类型切换到“Intouch”。 管理员的默认用户名:Administrator 密码:wonderware 。该用户是无法删除的。 打开项目时出现:另一会话正在编辑此应用程序。无法编辑此应用程序。该怎样解决? 文件夹下,删除appedit.lok。 在安装I/O Server的时候,弹出“install of common components could not be started! Please contact wonderwave techsupport !" 想问一下是什么原因,该怎么解决才能完成安装程序? 先安装:F:\软件备份\io servers\FS2K71\IOServer\Common\Win32\setup.exe 如何使用Unity编程软件的仿真器来与Intouch通信?
用C编写的RS232串口通信程序
void main() { delayms(100); init(); //初始化系统 delayms(100); init_wdt(); //初始化看门狗 while(1) { while(!RI_0) //是否收到数据 { clr_wdt(); } RI_0=0; //清除接收中断标志 buffer=S0BUF; if(buffer==0x5a) //检测祯头0 start0=1; if(buffer==0x54) //检测祯头1 start1=1; if(buffer==0x5a) //检测祯尾0 end0=1; if(buffer==0xfe) //检测祯尾1 end1=1; if((start0==1)&(start1==1)) { buff[i]=buffer; //从祯头1开始存储数据 i++; } if((end0==1)&(end1==1)) //是否已经接收祯尾 { count=i; //数据长度为count个 i=1; if((buff[2]==0x03)&(count==107)) //是否422指令 { buff[0]=0x5a; //重填祯头0 buff[count-4]=0; //校验和清零 for(k=2;k<(count-4);k++) //计算校验和 { buff[count-4]+=buff[k]; } for(k=0;k S0BUF=buff[k]; while(!TI_0); //等待发送完成 TI_0=0; //清除发送中断标志 } reset(); } else if((buff[2]==0x05)&(count==7)) //是否AD测试指令 { sendad(); reset(); } else if((buff[2]==0x18)&(count==7)) //是否发送时序信号指令 { sendpaulse(); reset(); } else //如果接收错误,则恢复各标志位为初始状态以便下次接收 { reset(); } } } } void reset() { start0=0; //祯头祯尾标志位清零 start1=0; end0=0; end1=0; for(k=0;k 单片机与pc串口通信程序及电路图 单片机与pc串口通信程序及电路图 #include #define BUFFERLEGTH 10 //----------------------------------------------------------------- void UART_init(); //串口初始化函数 void COM_send(void); //串口发送函数 char str[20]; char j; //------------------------------------------------------------------- void main(void) { unsigned char i; UART_init(); j=0; //初始化串口 for(i = 0;i }; while(1); } //------------------------------------------------------------- //-------------------------------------------------------------------------------------------------- // 函数名称:UART_init()串口初始化函数 // 函数功能:在系统时钟为11.059MHZ时,设定串口波特率为9600bit/s // 串口接收中断允许,发送中断禁止 //-------------------------------------------------------------------------------------------------- void UART_init() { //初始化串行口和波特率发生器 #include 串口通信协议程序 主机程序: /* 主机主要处理 : 主—>从 1.给从机发送命令 2.给从机发送数据 3.命令从机向主机发送数据 从—>主由中断程序处理根据从机发送过来的请求类型 0.请求主机发送命令(包括主到从的1,2命令) 1.请求主机接收数据 2,3保留 */ #include void delay(unsigned int i) { while(i--); } void init_uart(void) { TMOD=0x20; //定时器方式2--8位reload模式 TH1=0xfd; TL1=0xfd; PCON=0; //波特率不加倍 SCON=0xf0; //方式三 TB8=1; //发送地址时第九位为1 SM2=1; //接收到第九位为1时才能接收数据 TR1=1; //要在设置scon后开定时 ES=1; //开中断 EA=1; } //发送命令 void uart_send_cmd(uchar addr,uchar cmd)//uchar *date) { while(signal==0); //检查总线是否被占 signal=0; //占用总线 EA=0;//关中断 do { 目录 Q:TwinCAT的全称是什么? (2) Q:TwinCAT图标不同颜色各表示什么意义? (2) Q:什么是ADS? (2) Q:什么是source code download? (2) Q:怎样自启动PLC并运行程序? (3) Q:PLC变量如何与实际IO通道关联起来? (4) Q:PLC程序中能否执行关机重启等Windows的系统功能命令 (6) Q:System Manager处于何种模式时可以诊断IO模块的输入输出状态? (7) Q:把IO扫描上来后,怎样强制输出? (7) Q:TwinCAT Broadcast Search不到控制器的解决办法? (9) Q:TwinCAT PLC编程界面如图所示部分是用来干什么的? (9) Q:我在编写梯形图程序时,每当我定义/命名一个触点,软件就会弹出一个对话框,这个对话框是用来干什么的? (9) Q:TwinCAT延时启动方法? (9) Q:对数字量输出置true后但是输出一直在闪烁是什么问题? (13) Q:如果beckhoff某个端子模块出现故障并更换(甚至更换错了型号),PLC程序还会运行吗? (13) Q:强制数字量输出后,重新运行程序(停止后再运行)或者重新上电,会不会恢复原来值? (14) Q:如果工控机执行个死循环,那我们还可以连接到它吗? (14) Q:EL3318热电偶模块怎么在SystemManager里面添加进去(如何添加新模块到老TWINCAT版本) (14) Q:如何保证TwinCAT系统在进入操作系统后自动启动 (14) Q:如何在SystemManager中进行IO的组态? (15) Q:我用TwinCAT经常广播不到CP6701-0001-0020这屏,能ping通,但就是经常Broadcast不到 (18) Q:下载程序后,程序并没有运行,这是为什么? (18) Q:有什么功能可以诊断实际任务循环时间大于预设时间 (18) Q:在ST语言中和梯形图中分别如何添加功能块? (19) Q:TwinCAT添加路由需要注意什么? (19) Q:64位的操作系统安装了Tc211x64Engineering_R3_2.11.2230之后,无法切换LOCAL到运行模式? (23) 如何配置通过和通信 如何配置通过实现和的通信 概要介绍 无需借助西门子的软件可以通过标准的以太网卡访问 , 家族。可以通过, , , 协议连接客户端软件,如。 本一步一步详细介绍了如何配置和使用连接访问 (这里,我们以为例),以及如何用协议访问此。 在开始之前,请确保已满足以下条件: .仔细阅读并按照的文件及相关文档,来得到所需要的系统需求,正确的安装过程,操作系统等信息。 .安装,如果已经安装了以前版本的,请使用的"控制面板"中的"添加删除程序"卸载,本使用版。 .安装并配置以太网卡和协议。 .确认你可以""通你要连接的。 注意:请仔细阅读的在线文档关于所支持的硬件和软件部分,只支持通信,不支持,等其他非以太网方式。 本假定用户具有并理解以太网,西门子硬件软件,操作系统,组件,, 的基本知识。 配置 .选择任何栏上的开始程序以启动。 .找到包含“ ” 程序的文件夹,并点击启动程序。 .在 ()中找到“ ”树下的。在节点下,名字是“”。见下图: 图. – ! : 定义的默认更新时间间隔 ! : 定义当连接发生问题进入“ ”模式时,查询设备的时间间隔。当通信恢复正常后,的查询间隔调整为的查询间隔。 ! :“”是来自于客户端的读/写消息,“”是有处于“需采集”状态的数据点产生的,“”按“ ”为间隔周期性发送。“ ”定义在发送一个前可以发送的的最大数目。它是当有多个等待中的时,和的比例,比例的后者总是为1。所以,默认设置为表示和的比例是。这个比例确保当非常繁忙时,任有一定数量的动作。例如:比例设为, 同时有个, 个准备好,将先发送个,个, 在发送个, 个。 ! : 每个(读/写/刷新等)消息的超时设置,这个超时设置使得客户端不会由于某种原因永久不被发送时导致被挂起。这是一个中消息更新的最大允许时间。此数字应该设置为一个单独的数据更新不应超过此时间设置。 ! : 因为使用事件驱动的协议引擎,此选项无效。 ! D : 定义在“ ”根上可显示的最大的数。 ! : 有以下有效模式: 保持写数据的顺序不改变,并且不合并。 使用保留要写的第1,第2和最后一个数据的合并方式保持写数据的顺序。 不保持写数据的顺序,并且合并写数据的,只写入最后一个要写的数据。 ! : 控制按大小写顺利扫描数据项和。 ! : 此参数保留将来使用。 ! : 此设置在此中无效。 ! : 此参数控制系统数据点是否出现在浏览窗口中,是否做为数据采集接口的有效数据项。 ! : 此参数控制是否检查在整个中的唯一性。 在Windows应用程序的开发中,我们常常需要面临与外围数据源设备通信的问题。计算机和单片机(如MCS-51)都具有串行通信口,可以设计相应的串口通信程序,完成二者之间的数据通信任务。 实际工作中利用串口完成通信任务的时候非常之多。已有一些文章介绍串口编程的文章在计算机杂志上发表。但总的感觉说来不太全面,特别是介绍32位下编程的更少,且很不详细。笔者在实际工作中积累了较多经验,结合硬件、软件,重点提及比较新的技术,及需要注意的要点作一番探讨。希望对各位需要编写串口通信程序的朋友有一些帮助 一.串行通信的基本原理 串行端口的本质功能是作为CPU和串行设备间的编码转换器。当数据从 CPU经过串行端口发送出去时,字节数据转换为串行的位。在接收数据时,串行的位被转换为字节数据。 在Windows环境(Windows NT、Win98、Windows2000)下,串口是系统资源的一部分。 应用程序要使用串口进行通信,必须在使用之前向操作系统提出资源申请要求(打开串口),通信完成后必须释放资源(关闭串口)。 串口通信程序的流程如下图: 二.串口信号线的接法 一个完整的RS-232C接口有22根线,采用标准的25芯插头座(或者9芯插头座)。25芯和9芯的主要信号线相同。以下的介绍是以25芯的RS-232C为例。 ①主要信号线定义: 2脚:发送数据TXD; 3脚:接收数据RXD; 4脚:请求发送RTS; 5脚:清除发送CTS; 6脚:数据设备就绪DSR;20脚:数据终端就绪DTR;8脚:数据载波检测DCD; 1脚:保护地; 7脚:信号地。 ②电气特性: 数据传输速率最大可到20K bps,最大距离仅15m. 注:看了微软的MSDN 6.0,其Windows API中关于串行通讯设备(不一定都是串口RS-232C或RS-422或RS-449)速率的设置,最大可支持到RS_256000,即256K bps! 也不知道到底是什么串 主机程序: /* 主机主要处理: 主—>从 1.给从机发送命令 2.给从机发送数据 3.命令从机向主机发送数据 从—>主由中断程序处理根据从机发送过来的请求类型 0.请求主机发送命令(包括主到从的1,2命令) 1.请求主机接收数据 2,3保留 */ #include TR1=1; //要在设置scon后开定时 ES=1; //开中断 EA=1; } //发送命令 void uart_send_cmd(uchar addr,uchar cmd)//uchar *date) { while(signal==0); //检查总线是否被占 signal=0; //占用总线 EA=0;//关中断 do { do { SBUF=addr; //发送从机地址 while(TI!=1); TI=0; } while(RI!=1); //一直等待从机响应 //while循环里可加入出错处理temp_addr=SBUF; RI=0; } while(temp_addr!=addr); //一直等到从机回应的地址相同 //while循环里可加入出错处理 TB8=0; //发送数据第9位为0 // SM2=0; // 接收到第九位为1时才置位RI //每次一个数据 SBUF=cmd; while(TI!=1); TI=0; TB8=1; // SM2=1; RI=0; TI=0; //不处理期间发生的中断 EA=1; signal=1; //释放总线 } 课程设计任务书 学生姓名: xxx 专业班级: xxx 指导教师: xxx 工作单位: xxx 题目: 串行通信程序设计 初始条件: 用汇编语言编写程序,实现两台计算机之间的通信。 要求完成的主要任务: ①制作RS-232C通信线,并用它连接两台计算机; ②在计算机上用不同的颜色设置接收、发送区域; ③能设置发送、接收的数据长度,并能显示接收的数据; ④能选择通信校验方式(奇校验、偶校验或无校验); ⑤可以将接收的数据作为文件保存起来; ⑥撰写设计说明书及调试心得。 时间安排: 第一阶段: 查阅相关资料 第二阶段: 课程设计 第三阶段: 撰写课程设计报告 第四阶段: 课程设计答辩 指导教师签名:年月日系主任(或责任教师)签名:年月日 串行通信程序设计 1方案论证 首先,要能进行串行通信,串口是基础。使用RS-232 DB-9串口,实现基本通信时,只需将其5号线(地线)相连,2、3号线(接收、发送数据线)分别交叉相连即可。 根据要求,此程序可分为界面显示、参数设置、发送数据、接收数据和保存文件五部分。以下将从这五个方面进行方案论证。 1.1 界面显示 一般情况下显示器的屏幕为25行、82列,不妨把整个屏幕看成25*80个存储单元。屏幕坐上角存储单元的坐标为(0,0),即行号为0,列号为0。因此可通过设置不同的行号和列号定位屏幕上的存储单元。 用不同颜色设置发送和接收区域,即用不同颜色的空格填充发送和接收区域。这就需要调用BIOS系统中断,先置光标位置,再写当前字符和属性。这两项功能都可调用BIOS显示输出10H号中断服务程序实现,详见表1-1 10H号中断服务程序部分功能。 表1-1 10H号中断服务程序部分功能 IBM PC的标准显示器适配器,有单色和彩色之分,其中后者能以文本和图形两种工作方式,既可以显示黑白图形又可以显示有16种颜色的彩色图形。彩色文本方式下,设置不同的属性字节即可实现不同前景和不同背景的组合。例如,0111表示灰白,1110表示黄,设置灰白底黄字的属性为01111110,十六进制表示为7EH。 显示发送和接收两个区域的方案大体分两种,一是两个带状区域,一是两个并排的矩形。从美观的角度来讲,后者更胜一筹。显示标题、提示、设置等信息时,只需先将光标定到合 51单片机与上位机串口通信程序设计 1. 发送:向总线上发命令 2. 接收:从总线接收命令,并分析是地址还是数据。 3. 定时发送:从内存中取数并向主机发送. 经过调试,以上功能基本实现,目前可以通过上位机对单片机进行实时控制。程序如下: //这是一个单片机C51串口接收(中断)和发送例程,可以用来测试51单片机的中断接收 //和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的 #include< reg51.h> #include< stdio.h> #include< string.h> #define INBUF_LEN 4 //数据长度 unsigned char inbuf1[INBUF_LEN]; unsigned char checksum,count3 , flag,temp,ch; bit read_flag=0; sbit cp=P1^1; sbit DIR=P1^2; int i; unsigned int xdata *RAMDATA; /*定义RAM地址指针*/ unsigned char a[6] ={0x11,0x22,0x33,0x44,0x55,0x66} ; void init_serialcomm(void) { SCON=0x50; //在11.0592MHz下,设置串行口波特率为9600,方式1,并允许接收 PCON=0x00; ES=1; TMOD=0x21; //定时器工作于方式2,自动装载方式TH0=(65536-1000)%256; TL0=(65536-1000)/256; TL1=0xfd; TH1=0xfd; ET0=1; TR0=1; TR1=1; // TI=0; EA=1; // TI=1; RAMDATA=0x1F45; } void serial () interrupt 4 using 3 { if(RI) { RI=0; ch=SBUF; TI=1; //置SBUF空 switch(ch) { case 0x01 :printf("A"); TI=0;break; case 0x02 :printf("B"); TI=0;break; case 0x03 :printf("C"); TI=0;break; case 0x04 :printf("D"); TI=0;break; default :printf("fg"); TI=0;break; } } 如何配置Intouch SIDirect DAServer 通过TCP/IP和S7 PLC通信如何配置SIDirect DAServer 通过TCP/IP实现和S7 PLC的通信 概要介绍 无需借助西门子的Simaticnet 软件,SIDirect DAS Server 可以通过标准的以太网卡访问S7 200, S7 300,S7 400 家族PLC。SIDirect DAServer可以通过DDE, FastDDE, SuiteLink, OPC协议连接Windows客户端软件,如Wonderware InTouch。 本Tech Note 一步一步详细介绍了如何配置和使用Wonderware SIDirect DA Server连接/访问S7 PLC(这里,我们以S7-400 PLC 为例),以及如何用DDE/SuiteLink协议访问此DA Server。 在开始之前,请确保已满足以下条件: 1.仔细阅读并按照SIDirect DAServer的Readme文件及相关文档,来得到SIDirect DAServer所需要的系统需求,正确的安装过程,操作系统等信息。 2.安装SIDirect DAServer,如果已经安装了以前版本的SIDirect DAServer,请使用的"控制面板"中的"添加/删除程序"卸载,本Tech Note使用SIDirect DAServer 1.1版。 3.安装并配置以太网卡和TCP/IP协议。 4.确认你可以"Ping"通你要连接的PLC。 注意:请仔细阅读SIDirect DAServer的在线文档关于所支持的硬件和软件部分,SIDirect DAServer只支持TCP/IP 通信,不支持MPI,Profibus等其他非以太网方式。 本Tech Note假定用户具有并理解以太网,西门子S7 PLC 硬件/软件,Windows 操作系统,Wonderware FactorySuite组件,WWClinet, SIDirect DAServer的基本知识。 配置SIDirect DAServer 1.选择任何栏上的开始/程序以启动SIDirect DAServer。 2.找到包含“System Management Console” 程序的 Wonderware文件夹,并点击启动System Management Console 程序。单片机与pc串口通信程序及电路图
51单片机与蓝牙串口通信程序
串口通信协议程序
倍福PLC编程应用常见问题解答
如何配置IntouchSIDirectDAServer通过TCPIP和S7PLC通信
MFC实现对串口通信的编写
串口通信协议程序
串行通信程序设计
51单片机与上位机串口通信程序设计
如何配置Intouch SIDirect DAServer 通过TCP_IP和S7 PLC通信