定向井工程设计

第一节定向井、水平井二维轨道设计
一、设计原则:
一口定向井的总设计原则,应该是能保证实现钻井目的,满足采油工艺及修井作业的要求,有利于安全、优质、快速钻井。在对各个设计参数的选择上,在自身合理的前提下,还要考虑相互的制约。要综合地进行考虑。
(一)选择合适的井眼形状
复杂的井眼形状,势必带来施工难度的增加,因此井眼形状的选择,力求越简单越好。
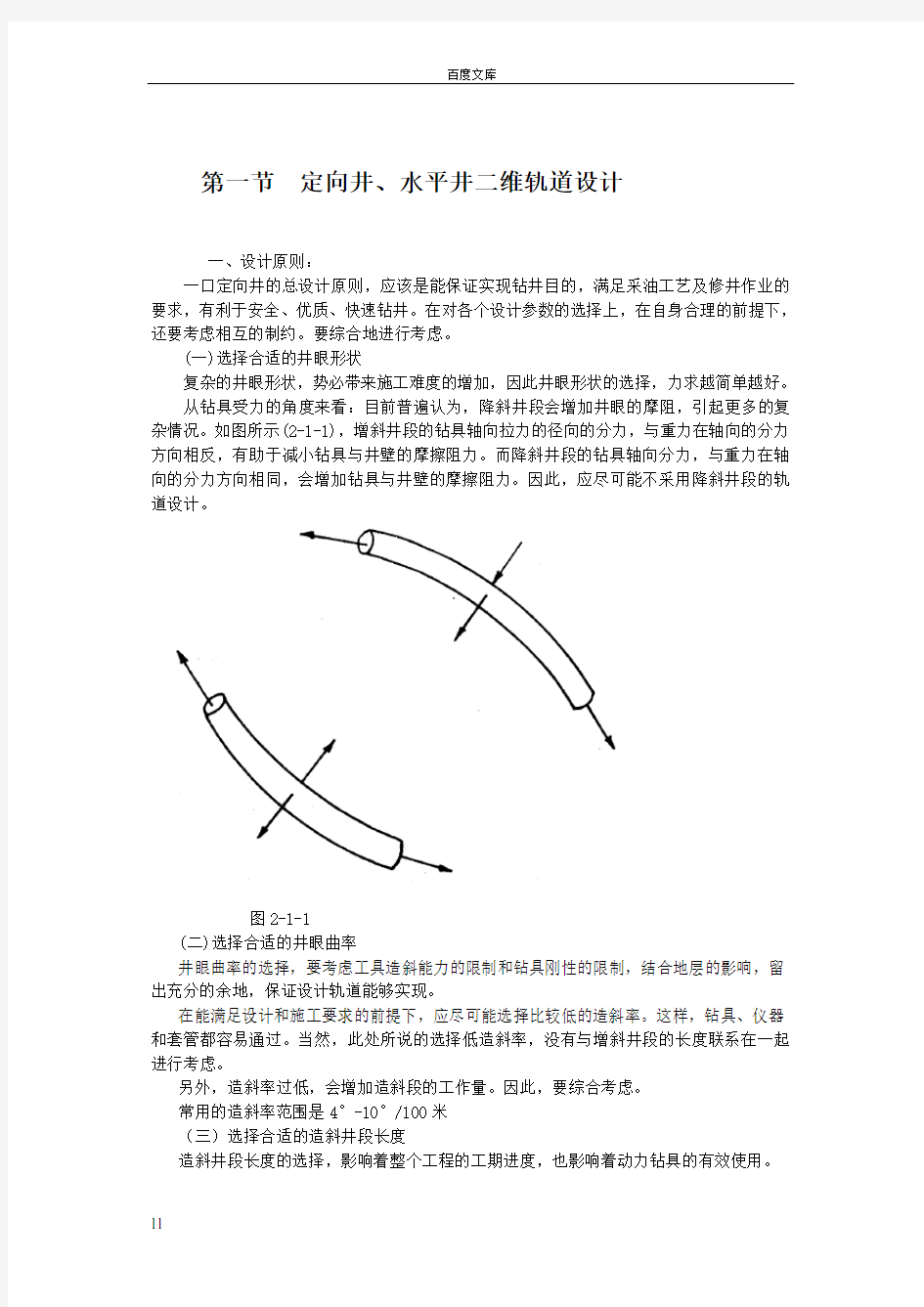
从钻具受力的角度来看:目前普遍认为,降斜井段会增加井眼的摩阻,引起更多的复杂情况。如图所示(2-1-1),增斜井段的钻具轴向拉力的径向的分力,与重力在轴向的分力方向相反,有助于减小钻具与井壁的摩擦阻力。而降斜井段的钻具轴向分力,与重力在轴向的分力方向相同,会增加钻具与井壁的摩擦阻力。因此,应尽可能不采用降斜井段的轨道设计。
图2-1-1
(二)选择合适的井眼曲率
井眼曲率的选择,要考虑工具造斜能力的限制和钻具刚性的限制,结合地层的影响,留出充分的余地,保证设计轨道能够实现。
在能满足设计和施工要求的前提下,应尽可能选择比较低的造斜率。这样,钻具、仪器和套管都容易通过。当然,此处所说的选择低造斜率,没有与增斜井段的长度联系在一起进行考虑。
另外,造斜率过低,会增加造斜段的工作量。因此,要综合考虑。
常用的造斜率范围是4°-10°/100米
(三)选择合适的造斜井段长度
造斜井段长度的选择,影响着整个工程的工期进度,也影响着动力钻具的有效使用。
若造斜井段过长,一方面由于动力钻具的机械钻速偏低,使施工周期加长,另一方面由于长井段使用动力钻具,必然造成钻井成本的上升。所以,过长的造斜井段是不可取的。
若造斜井段过短,则可能要求很高的造斜率,一方面造斜工具的能力限制,不易实现,另一方面过高的造斜率给井下安全带来了不利因素。所以,过短的造斜井段也是不可取的。
因此,应结合钻头、动力马达的使用寿命限制,选择出合适的造斜段长,一方面能达到要求的井斜角,另一方面能充分利用单只钻头和动力马达的有效寿命。
(四)选择合适的造斜点
造斜点的选择,应充分考虑地层稳定性、可钻的限制。尽可能把造斜点选择在比较稳定、均匀的硬地层,避开软硬夹层、岩石破碎带、漏失地层、流沙层、易膨胀或易坍塌的地段,以免出现井下复杂情况,影响定向施工。
造斜点的深度应根据设计井的垂深、水平位移和选用的轨道类型来决定。并要考虑满足采油工艺的需求。
应充分考虑井身结构的要求,以及设计垂深和位移的限制,选择合理的造斜点位置。
(五)选择合适的稳斜段井斜角和入靶井斜角
井斜角的大小,直接影响了轨迹的控制。
井斜角太小时,方位不好控制。而井斜角太大时,施工难度却又增加。因此,稳斜段井斜角和入靶井斜角的选择,应充分满足轨迹控制的需要。另外,它对方位控制、电测、钻速都有明显的影响。
一般来讲,井斜角的大小与轨迹控制的难度有下面的关系:
1.井斜角小于15°时,方位难以控制;
2.井斜角在15°--40°时,既能有效地调整井斜角和方位,也能顺利地钻井、固井和电测。是较理想的井斜角控制范围;
3.井斜角在40°--50°时,钻进速度慢,方位调整困难;
4.井斜角大于60°,电测、完井作业施工的难度很大,易发生井壁垮塌。
二、设计方法
定向井的设计方法分为常规设计方法和特殊井的设计方法。
常规设计方法指的是在两维平面内作的轨道设计,即设计的井眼轴线只在某个给定的铅垂面内变化,也就是说,只有井斜角的变化,没有方位角的变化。
把常规设计之外的所有设计方法都叫做特殊设计方法。
(一)常用两维轨道设计方法
目前常用的两维定向井轨道设计,采用的是恒定造斜率的设计,设计轨道由铅垂面内的圆弧和直线组成。对于这种恒定造斜率的设计,通常有下列三种设计方法。
1.查图法
这是国外以前常用的设计方法之一。使用这种方法设计定向井轨道,需要事先将每种造斜率钻达不同最大井斜角的数据作在同一张图上。这样,各种不同的造斜率下作出的图形,就可得到一套图表。在进行轨道设计时,根据设计造斜率的不同选择一套适用的图表。在该图上,就可查出未知的设计数据。
下面就是2°/ 30米标准造斜率曲线图。
图2-1-2 查图法图表
2.几何作图法
这种设计方法是根据已知的设计条件,应用平面几何作图的原理,用圆规和直尺,按比
H0
a R
H
b
S C
图2-1-3 几何作图法
由于计算机在石油钻井领域的广泛应用,查图法和几何作图法已很少在我国采用。目前使用最多的是下面将要介绍的解析计算法。
3.解析计算法
解析计算法是根据已知设计条件,应用解析计算公式求解出设计轨道的各个未知参数的方法。这种方法由于计算复杂、工作量太大,在计算机普及之前,未能得到广泛的应用。而在现在,已经广泛应用于定向井的设计之中。这种计算方法的最大特点是计算准确、求解对象可灵活改变。
下面以“直—增—稳”三段制轨道类型,介绍解析计算法的设计步骤。 已知条件:Kop —造斜点 Kb---造斜率
Tv---设计垂深 Tb---设计位移 求:αm---求最大井斜角 H----稳斜段长度 求解步骤:
①求造斜段的曲率半径:R=1/Kb ②求θ的角度值: ΔS=Tb-R ΔV=Tv-Kop
θ=arctg(ΔS/ΔV) ③求φ的角度值:
φ=arccos(R/L) ④求最大井斜角:am=φ-θ ④求稳斜段段长度:
KOP R ΔS
L
ΔV
θ
αm
TV TB 图2-1-4 解析计算法图形
以前在采用查图法和几何作图法进行轨道设计时,通常都是只能求解某个固定的未知参数,由于计算机在石油钻井领域的广泛应用,现在的定向井轨道设计已经基本上采用了计算机设计,这就使得轨道设计的灵活性得到了充分的体现,配合解析几何设计方法,能2
2V S L ?+?=2
2R L H +=
够对任何两个未知参数进行求解,这就使得定向井轨道设计变得更加灵活,更加多样化了。
(二)特殊定向井轨道设计方法
对于特殊定向井的轨道设计,则根据其钻井目的和设计条件的限制,采用了各种不同的方法。如:
1.多增降轨道设计 2.缓降轨道设计
3. 缓降轨道设计
4.悬链轨道设计
5.三维轨道设计
三、特殊要求定向井的轨道设计
(一)多目标井设计
图2-1-5 多目标井示意图
如图2-1-5所示,在断块油田内,由于非垂直断层的封闭,沿断层聚集形成了一串的多套含油、气层。
多目标井的钻探目的是为了让定向井井眼轨迹按规定的井斜角和方位角钻穿这一串油、气藏,以使该井眼轨迹能代替多口直井的作用,发挥更大的经济效益,因此,地质方面给出了两个靶点。分别代表井眼贯穿油层的开始点和终止点。
该如何这样的井设计呢?
如图2-1-6所示,这种井的设计是这样进行的:由两个靶点计算出入靶井斜角和方位角,然后反推井口位置。其中包括了对造斜率的选择、稳斜段长和造斜点的选择。
KOP R αm
αm H T V T B 图2-1-6
已知条件:
αm-------最大井斜角 Kb-------造斜率 Tv-------设计垂深 Tb-------设计位移 求:
Kop------造斜点 H--------稳斜段长度
求解步骤:
①求造斜段的曲率半径:R=1÷Kb ②求稳斜段段长度:
③求造斜点
Kop=Tv-H*cos αm-R*sin αm
多目标井的设计靶区仍然是水平面上的圆形区域,其轨迹控制难度较一般定向井略难。
(二)二维水平井轨道设计
水平井的轨道设计在算法上类似于多目标井,但其设计思想有根本的不同。它的钻探目的是要在油层内水平钻进一段距离,尽量增加油层的暴露面积,以提高单井的产量。
水平井的设计靶区是一垂直于设计入靶线的平面(称作法面)上的矩形区域。也称作入靶窗口。由于入靶窗口的上下限通常在十米之内,因此其控制难度很大,在轨迹控制时的一点失误,都有可能导致最后的脱靶。常用的水平井二维轨道设计类型有三种:
单圆弧型—设计轨道从造斜点到入靶点,由一段圆弧组成。适合中曲率半径和短曲率半径的水平井。
双增稳型—设计轨道从造斜点到入靶点,由两圆弧段和连接这两圆弧段的稳斜段组成,适合中半径和长半径水平井。
三段增斜型—这种设计类型是由双增稳型发展而来的,设计轨道从造斜点到入靶点,由三个圆弧段组成。适合中半径和长半径水平井。 m
m b R T H ααsin )
cos 1(--=
将稳斜段改为增斜段,是因为钻双增稳型水平井时,在第一增斜段钻完后,首先要下一趟柔性钻具组合通井,然后再下刚性稳斜钻具组合钻进。这就带来了两个方面的不利。一方面多下一趟通井钻具组合却不能多打进尺。另一方面,再下入刚性钻具组合钻进时,钻具组合不容易通过造斜段。
改成稳斜段后,下同一趟钻具组合,既可通井,又可打进尺,简化了钻具组合,节约了时间,同时也减小了事故发生的可能性。
下面,介绍双增类型水平井轨道设计的计算方法:
H0
R1 S1
α1 m
γβ H3
H
H1
L R2
H2
α2
S Sn
图2-1-7
如图所示,图2-1-7
已知:H------设计垂深
S------入靶点位移
S0-----水平段长
a1-----第一增斜终点井斜角
确定:H0----造斜点
K1----第一增斜率
K2----第二增斜率
a2----第二增斜终点井斜角
L-----稳斜段长度
则:
曲率半径为:
R 1=1/ K 1 R 2=1/ K 2 R 0= R 1- R 2
H 3=H- H 0- R 2×sina 2 S 2=S+ R 2×cosa 2- R 1
第一段增斜终点井斜角为:
稳斜段长度为:
第二节 定向井、水平井的三维轨道设计
三维轨道设计主要应用于以下几个方面:
第一,对于方位漂移严重的地区,为了有效利用地层的自然造斜规律,减少井眼轨道
控制和造斜的工作量,可将井眼轨道设计成考虑方位漂移的三维轨道。这样的设计对指导现场施工会更有意义。这种设计称为方位漂移设计。
第二,若地面井位和目标点固定,而在由它们所确定的铅垂面内,存在着不允许通过
或难以穿过的障碍物,如已钻井眼、复杂的地层(盐丘、金属矿床、断层、气顶等),要设计一口定向井使其绕过障碍物钻达目标点,这样的定向井称之为绕障定向井。绕障定向井在密集丛式井和油田开发后期,用定向钻井方法打调整井时会遇到。
第三,在钻井过程中,要使实钻轨道与设计轨道完全吻合几乎是不可能的,二者之间
总会有一定的偏差。很小的偏差是允许的,有时也许对钻进参数或钻具组合稍作调整,仍可继续钻进;如果偏差很大,就需要以原设计轨道为依据,对下一段未钻井眼作出新的设计。另外,由于地质勘探等方面的原因,需要中途改变目标点的位置时,也需要设计出一条新的井眼轨道。这种修正设计在钻进过程中是随时可能发生的,因此称之为随钻修正设计。
第四,在老井侧钻尤其是定向井的侧钻中,往往是要钻达的油层位置不在原来定向井
的剖面上,这就需要调整井斜和方位钻三维井眼才能到达目的层。
一、 空间绕障定向井的设计方法
1)剖面类型的判别
由于三维定向井的设计和施工都比二维定向井难度大,所以,如果条件允许应首选二维剖面。 2
32
2H S M +=???
??+?
??
?
??=M R H S arctg 0321arcsin α2
2R M L +=
在设计绕障定向井时,除需要一般定向井的设计条件外,还应该有对障碍物的具体描述。障碍物的形态描述依赖于它们各自的特点,如已钻井眼的一般模型为曲圆台或直圆台;复杂地层可假设为斜直圆台或球体等。尽管它们的表达形式可能是多种多样的,但是其一般模型都可以用如下的通式来表示
g(X ,Y ,Z)=0 (2-1)
过所设计井的井口点和目标点作一个铅垂平面,则该平面就是二维绕障定向井的设计平面,如图2-2-1所示
绕碍定向井的剖面类型判别设计平面与障碍物边界的交线是平面曲线。为了描述这条平面曲线,建立一个二维坐标系0-SH 。
图2-2-1绕障定向井的剖面类型判别 因为
X =Scos Y =Ssin Z =H 00 фф???
?
? (2-2)
式中ф0————井口至目标点连线的方位角。
所以,将(2-2)式代入(2-1)式,可以得到障碍物的边界在设计平面内的二维表达形式
h (H ,S )=0 (2-3)
假设先不考虑障碍物的存在,那么选定一个剖面类型并且确定出造斜点位置、增斜率等相应的参数之后,应用§给出的方法,就可以得到一种二维剖面的设计结果。此时,设计轨道方程可表示为:
f (H ,S )=0
(2-4)
当然,根据设计轨道的特点,(2-23)式往往是某种分段函数。 联立(2-22)和(2-23)式,得:
h H S =0
f H S =0 (,)(,)???
(2-5)
求解(2-24)式时,只有两种可能的结果:
⑴无解。表示设计轨道不通过障碍物的控制范围。此时,井眼轨道设计成二维剖面就可实现绕障。
⑵有解。说明设计轨道已通过障碍物的控制范围。此时,可以调整设计参数或剖面类型。重新设计出井眼轨道,然后再对(2-5)式进行求解。如此重复设计、求解和判断。如果在可供选择的剖面类型和允许的设计参数范围内,(2-5)式均有解,则该井需要设计成三维绕障定向井。否则,可以不必进行三维绕障设计。
下面结合实例给出(2-5)式的具体表达形式和求解方法。交点为P 点,则P 点的坐标(X P ,Y P ,Z P )以及井斜角αP 、方位角фP 等参数可以通过测斜计算(若P 点不是测点,可采用插值法)求得。在P 点以已钻轨道的切线方向为ζ轴,以井眼高边为ζ轴,建立右手坐标P-ξηζ。如图2-2-2所示。
由于ξ、η、ζ轴在0-XYZ 坐标系下的方向余弦分别为 O X ζ
Y P ζ η Z
图2-2-2 障碍物的描述
T =cos T =cos T =-sin T =-sin T =cos T =0 T =sin T =sin sin T =cos 11P P 12P P 13P 21P 22P 2331P P 32P P 33P
афафаффафафа???
??
(2-6) 式中 T ij 表示i 轴(i=1,2,3。分别代表ξηζ轴)对于j 轴(j=1,2,3。分别代表X ,Y ,Z 轴)的方向余弦。
所以,P-ξηζ与0-XYZ 坐标系的转换关系为
ξηζ??????????=T11 T12 T13T21 T22 T23T31 T32 T33 ??
??????
?
?
X -X Y -Y Z -Z P P P ???????
???
(2-7)
即
ξафафаηффζафафа=( X -X )cos cos +( Y -Y )cos sin P -( Z-Z )sin =-( X -X )sin +( Y -Y )cos
=( X -X )sin cos +( Y -Y )sin sin +( Z-Z )cos
P P P P P P P P P P P P P P P P P P P ???
??
(2-8)
如果将P 点附近已钻井眼的控制范围用半径为R P 的空间圆柱体来描述,则有:
ξ2+η2≤R 2
P (2-9) 由(2-27)和(2-28)式可以得到控制体边界的议程为:
g(X ,Y ,Z)=(X-X P )2+(Y-Y P )2+( Z-Z P )2
-[( X-X P )sin аP cos фP +(
Y-Y P )sin аP sin фP +(Z-Z P )cos аP ]2- R 2
P =0 (2-10) 将(2-21)式代入(2-29)式,得
h(H,S)=aH 2-2bHS+cS 2
-2dH-2eS+f=0 (2-11) 其中
a =sin
b = sin cos cos(- )
c =1-sin cos (- )
d = Z -cos
e = X cos + Y sin -sin cos(- )
f = X + Y + Z - - R = X sin cos + Y sin sin + Z cos 2P P P P 02P 2P 0P P P 0P 0P P 02P 2P 2P 2P 2P P P P P P P P P аааффаффλаффλаффλλафафа
???
????
??
???? (2-
12)
O S O S Αi Mi L α αf αi Mi Mf i
Mf a b 图2-2-3 设计轨道的描述
假设给定一种剖面类型以及相应的设计参数,那么就可以设计出一条二维的井眼轨道。如果设计轨道各段起始点M I 处的井深、井斜角和坐标值分别为L i 、аi 和H i 、S i ,则设计轨道可描述如下:参见图2-2-3
对于圆弧井段
a a L L R i i =+?-?
???
?
??180πH =H +R(sina -sina )S =S +R(cosa -cosa) i i i i (2-13)
式中,R —圆弧段的曲率半径。增斜时取正值,降斜时取负值。
对于斜直井段
H =H +(L -L)cosa
S =S +(L -L)sina i i i i i i ???
(2-14)
将(2-13)式和(2-14)式代入(2-D11)式,求出L 值。若在整个设计轨道上至
少有一点的L 值有实根且满足L i 2)三维绕障定向井的设计 当采用二维剖面不能实现绕障时,就需要进行三维绕障设计。为叙述方便,仍以已钻定向井作为障碍物的情况为例。 如上所述,过井口点0和目标点T 作一铅垂平面,该平面与已钻井眼交于P 点,则P 点处的参数可以确定。过P 点垂直于已钻井眼的切线作一空间斜平面,交Z 轴于F 点,则已钻井眼的控制边界在该斜平面上可认为是圆形。如图2-2-4所示。 O X A F B C ξ D η 图2-2-4空间斜平面示意图 空间斜平面的方程可由下式表达: ( X-X P )sin аP cos фP +( Y-Y P )sin аP sin фP +(Z-Z P )cos аP =0 (2-15) 交点F 的坐标为 X =0Y =0 Z = X tg cos + Y tg sin +Z F F F P P P P P P P афаф??? ?? (2-16) 由于目标点T 一般不在这个斜平面上,所以根据给定的最终井斜角аT 和最终方位角фT ,可以求出过T 点的直线与斜平面的交点E 处的坐标 X =X -tsin cos Y =0 Z = X tg cos + Y tg sin +Z E P T T E E P P P P P P P афафаф??? ?? (2-17) 其中 t= (sin cos ()sin sin ()cos cos cos sin sin cos() )X X a YT YP a ZT ZP a a a a a T P p p p p p p T p T T P -+-+-+-???? 将(2-36)式和(2-35)式分别代入(2-26)式,便可求出E 点和F 点在P-ξηζ坐标系下的坐标(ξE ,ηE ,0)和(ξF ,ηF ,0)。这样,就可以设计斜平面上的井眼轨道了。如图2-2-5所示。 H0 ξ A 0 C C D θ F δ E η σ 图2-2-5 斜平面上的轨道设计 对于由闭合曲线围成的障碍物,应首先判别设计轨道的绕行方向。 若令 式中 SGN —符号函数。 则 q=101,,,绕井眼高边设计井眼高边或低边设计绕井眼低边设计 -??? ?? (2-19) 当确定出绕行方向后,则有 q ≠0。 设线段FP 、PE 和EF 的长度分别为D 1、D 2和D 3,则 D D D F F E E E F E F 12222232 =+=+=-+-???????ξηξηξξηη()() (2-20) 于是 sin δ=sin ∠CFP=R D P 1 (2-21) cos σ=cos ∠EFP=D D D D D 212322 13 2+- (2-22) H 0=D 3cos(δ-σ)-D 1cos σ (2-23) A 0=D 3sin(δ-σ) (2-24) ? ?? ? ??---=F F E F E F SNG q ηηηζζζ 因此,井眼轨道的弯曲角θ可由下式计算 tg θ2=H H A R A R A P P 022202 00 -+-- (2-25) C 点的坐标为 ξβ ηβζC P C P C R R ===??? ??cos sin 0 (2-26) 其中 tg β2 =ηζηξF F F P F P q R R ++-+222 (2-27) 式中,β—ξ轴绕P 点顺时针转至C 点所形成的角度。 D 点的坐标可用下式确定 ξβθηβθζD P D P D R q R q =+=+=??? ??cos()sin() (2-28) 将(2-26)式和(2-28)式分别代入(2-7)式,便可以得到C 点和D 点在O —XYZ 下的坐标(X C ,Y C ,Z C )和(X D ,Y D ,Z D )。 因此,C 点和D 点的井斜角与方位角分别为 tga X Y Z Z tg Y X D C C C F C C C =+-=?? ??? ? ?22? (2-29) 及 tga X X Y Y Z Z tg Y Y X X D E D E D E D D E D E D =-+--=--????? ? ?()()22 ? (2-30) 由Z 轴和FC 直线所确定的平面是铅垂面。在这个铅垂面内按给定的曲率半径R 1可确 定圆弧井段AB ,如图2-5所示。 于是,造斜点井深为 Z A =Z F -R 1tg a c 2 (2-31) 同理,由DE 和ET 两条直线确定一个斜平面,在这个斜平面上,可以用一个圆弧井段实现两个斜直井段之间的平滑过渡。如图2-2-6所示。 M E D R 2 N ε T 图2-2-6调整井段示意图 若给定曲率半径R 2,则 ( DM =(X -X )+(Y -Y )+(Z -Z )R tg 2=(X -X )+(Y -Y )+(Z -Z )E D 2E D 2E D 2 2T E 2T E 2T E 2-=-????? ? ? ??επεε MN R NT R tg 221802 (2-32) 当然,也可以根据具体情况设计成没有斜直井段DM 或NT 的剖面。这时,可由(2-32)式确定出所需要的曲率半径R 2。 至此,井眼轨道设计完毕,它由直井段(OA )—造斜井段 (AB )—斜直井段(BC )—绕障井段(CD )—斜直井段(DM )—斜面圆弧井段(MN )—斜直井段(NT )组成。 二、 待钻井眼轨迹的三维设计 分析国外现有的三维轨道设计方法,我们选用了符合国内习惯的柱面法三维轨道设计。 三维轨道设计,首先是在水平投影面上进行方位变化的轨道投影设计,然后再以此轨道的投影线为母线,沿垂深方向剖开成一个圆柱面,在此柱面的展开面上进行井斜角变化的的设计。就好象是把水平投影轨道长度作为一个当量位移,来做的二维剖面设计。最后再将井斜角和方位角的变化组合到一起,完成最终的三维轨道整体设计。并求出不同垂深时的东西分量和南北分量。 适合水平井轨道水平投影设计的类型有两种, 第一种是一次调方位类型,如图2-2-7 所示。 这种类型轨道设计的井口位置不在设计入靶确定的方位线上。第二种是二次调方位类型,如图 2-2-8 所示。 这种类型轨道设计的井口位置在入靶确定的方位线上。很明显,一次调方位类型比二次调方位类型简单。因此,应尽可能使用第一种调方位类型。 A 点 B 点 井眼设计方位 井口 图 2-2-7 一次调方位轨道设计示意图 B点 R2 A点 眼R2设计方位 R1 老井 井口 图 2-2-8 二次调方位轨道设计示意图 三维轨道设计的原理和方法 (一)、技术难点 根据原井眼条件确定侧钻位置,,由于原井眼轴线并非都是铅垂线,井眼轨迹有井斜和方 位角变化,侧钻点一般有水平位移和井斜、方位角,难以保证侧钻点与入靶点和终靶点在一 个平面内,因此须要进行三维轨道设计。短半径侧钻水平井三维轨道设计的技术难点是:A.如何将原井眼侧钻点的井身轨迹数据与侧钻井眼的井眼轨道连接在一起,从而形成一 个简单、完整的井身轨道设计。 B. 根据地质要求,油藏类型及地层特点,需要开发多个目标油层,侧钻水平段轨道设计已不是普通水平井的水平段的稳斜设计,而是多形状的水平段轨道设计。 (二)、三维轨道设计特点 C. 侧钻点是三维空间点,侧钻点相对原井口有一定的水平位移和井斜、方位角,称为侧钻点矢量。 D. 靶点有井斜、方位角、水平位移和垂深的限制,称为靶点矢量。 E. 侧钻点根据地质特点和轨迹控制要求,可在一定范围内进行调整,即引起侧钻点矢量的变化。两个空间矢量的的连接,在几何上,需要空间曲线才能连接。 F. 井眼轨道三维设计,投影位移的计算尤其重要,设计时垂直轨道图是柱面展开图,计算投影位移时,也要投影到柱面上。 (三)、三维轨道设计思路: 用柱面法进行设计。井眼轴线在铅垂柱面上,井眼轴线沿铅垂柱面投影到一水平面,得到水平投影图,水平投影图由直线和园弧段组成的光滑曲线:将铅垂柱面拉直到一平面,得到垂直剖面图,垂直剖面图由直线段和园弧组成。 按上面的设计思想,三维轨道设计时,先设计水平投影图,后设计垂直轨道图。 (四)、水平投影图设计 1、扭一次方位计算(不提前扭完) ΔΦ 2 Φ1A B Φ1 1 E ΔΦ O 图2-2-9扭方位示意图 上图中,A 、B 为靶点,点2为开始扭方位点,A 点是扭方位终点 E A1=E A -E 1 (2-33) N A1=N A -N 1 (2-34) E B1=E B -E 1 (2-35) N B1=N B -N 1 (2-36) ΦAB tg =-1 N N E E B A B A -- (2-37) Φ11 1 1 A A A tg N E =- (2-38) ?ΦΦΦ=-AB 1 (2-39) L E N A A A 11212=+ (2-40) R L SIN COS A A A max ()() = ?--1111φφφ? (2-41) L L COS R SIN A A A 12111=?--?()()max ΦΦ?Φ (2-42) S L COS R SIN R A A A A 12111=?--?+?()()max max ΦΦ?Φ?Φ (2-43) 式中:E 1、N 1为侧钻点1相对井口的坐标 Φ1为点1到点2的方位 Φ1A 为点1到点A 的方位 ΦAB 为水平段AB 方位 E A1、N A 为A 点相对侧钻点的坐标 E A 、N A 为A 点相对井口的坐标 E B1、N B1为B 点相对侧钻点的坐标 E B 、N B 为B 点相对井口的坐标 L 1A 为点1到点A 的直线长度 S A 为A 点水平投影长度 2、 一次扭方位计算(提前扭完方位) C ΔΦ P O Φ1 R A B 1 图2-2-10扭方位示意图 图2-2中,1点为侧钻点,P 点为扭方位始点,Q 点为扭方位终点,A 、B 为靶点 L AC =L 1A ?-sin(ΦΦ11A (2-44) L1A ,Φ1A ,由(31)、(33)式计算 L C1=L 1A ?-cos()ΦΦ11A (2-45) ?ΦΦΦ=-AB 1 ΦAB 由(2-41)式计算 用直增稳方法求出L P1: L AC 当做目的层水平位移,?Φ当作最大井斜,L C1当作目的层垂深,用直增稳方法求出的造斜点深即为L P1,稳斜段长即为L AQ 。 S A =L P1+R A ×?Φ+L AQ (2-46) 式中:R A 为水平图内曲率半径 3、 两次扭方位计算 α1 B A O1 1’ R A1 Q αp P A’ Φ1 αp 1 E α2 R A2 α1 αp 图2—2-11两次扭方位几何图形 O’ 由图2-2-11 看出: R A1×(1-COS αP )+PQ ×SIN αP +R A2×(COS α1-COS αP )-AA '=0 R A1×SIN αP )+PQ ×COS αP +R A2×(SIN αP -SIN α1)-1A '=0 α2=ΦΦ11A - α1=ΦΦ1-AB αP =ΦΦQ -1 ?ΦΦΦ=-AB Q AA '=L 1A ×SIN α2 1A '=L 1A ×COS α2 L 1A 由(2-33)计算 令: F1=1-COS(αP) F3=R A2×(COS(α1)-COS(αP))-AA' G1=SIN(αP) G3=R A2×(SIN(αP)-SIN(α1)-1A' G2=COS(αP) 则得到: F1×R A1+G1×P Q+F3=0 G1×R A1+G2×P Q+G3=0 (2-47) R A1=(F3×G2-G1×G3)/(G1×G1-F1×G2)(2-48) P Q=(F3+F1×R A1)/G S A=R A1×αP+R A2×?Φ(2-49) 式中:RA2为水平内曲率半径 ΦQ为Q点的方位,即第一次扭方位后的方位 (五)垂直轨道设计计算 1、单增轨道计算 由于侧钻点矢量和靶点矢量的限制,用一个圆弧段连接两个矢量的可能性很小,因此设计上用圆弧+直线段连接两矢量。 R1 H Z1 H z2 α1 H Z3 A S Z2S Z3 αmax S Z1 图2—2-12单增轨道设计几何图 由图2-2-12看出 S Z2=R1×(cosα1-cosαmax) H Z2=R1×(sinαmax-sinα1) S Z3=S Z1-S Z2 H Z3=H Z1-H Z2 由于: S Z3/H Z3=TAN(αmax) R1= S H tg tg Z Z 11 11 -? --?- α ααααα max max max max cos cos(sin sin) (2-50) 代入上式整理得: 当αmax=90°时 R1= H Z1 1 1-sinα (2-51)