机械控制工程基础第二章答案

习 题
2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x i
o
o
o
o
222=++ (2) x tx x x
i
o
o
o
222=++ (3)
x x x x i
o
222o
o
=++ (4) x tx x x x
i
o
o
o
222o
=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。线性系统的一个最重要特性就是它满足叠加原理。该题中(2)和(3)是线性系统。
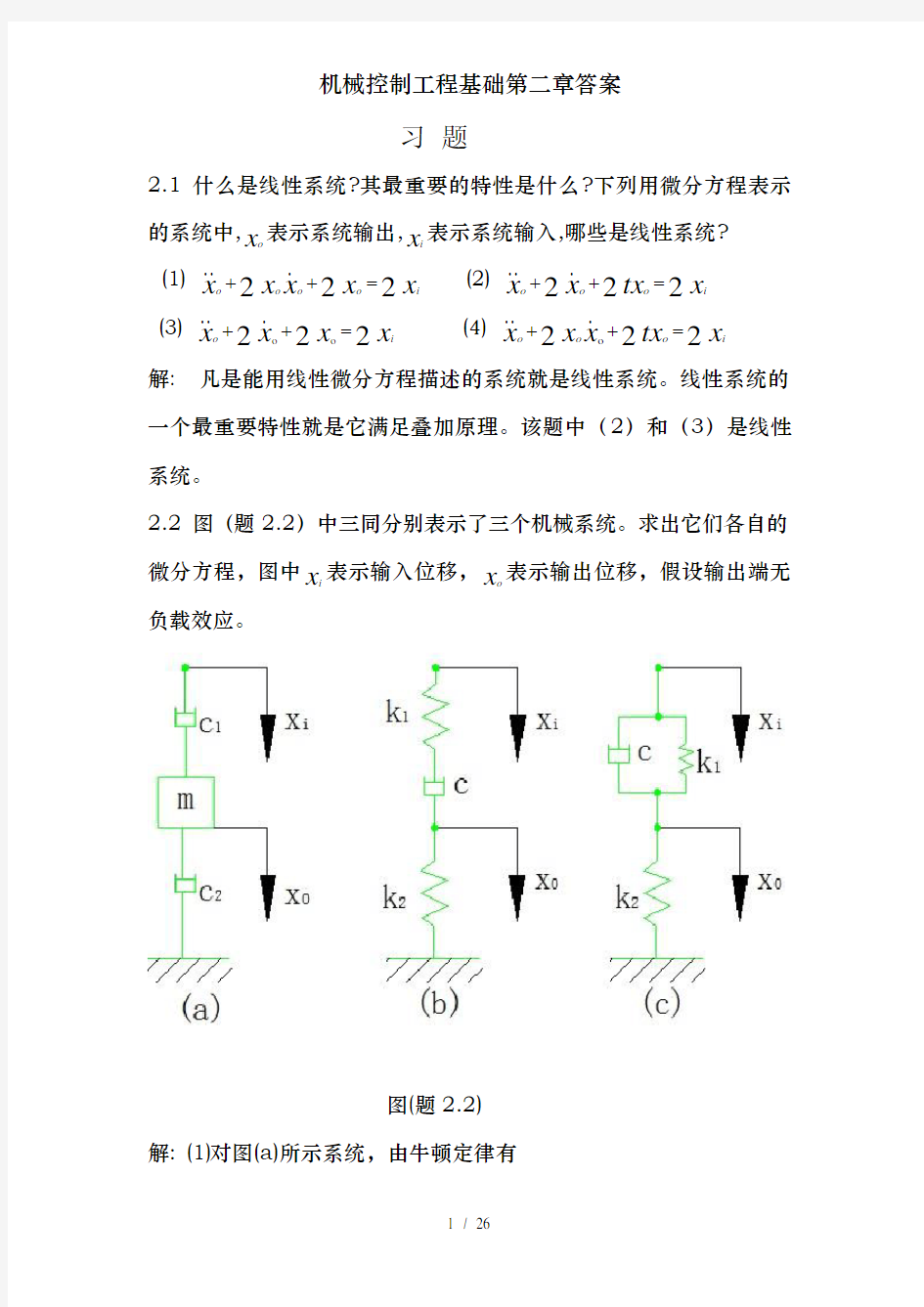
2.2 图(题2.2)中三同分别表示了三个机械系统。求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有
x
m x c x x c i
o
o
2
o
1
)(=-- 即
x c x c c x
m i
1
2
1
o
o )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有
)1()()(1
x x
c k x x o
i
-=-
)2()(2
x k x x
c o
o
=-
消除中间变量有
x ck x k k x
k k c i
o
1
2
1
o
2
1
)(=-- (3)对图(c)所示系统,由牛顿定律有
x k x x k x x
c o
o
i
o
i
2
1
)()(=-+-
即 x k x c x k k x
c i
i
o
o
1
2
1
)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)
解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有
i R u u o
i
1
1=-
dt
i i C
u u o
i
)(1
1
1
?-=-
消除中间变量,并化简有
u R C u C
C R R u R C u R C u C
C R R u R C i
i
i
o
o
o
1
2
2
1
1
2
2
1
2
2
2
1
2
1
2
1
1)()1(1++
+=-+++ (2)对图(b)所示系统,设
i 为电流,则有
?++=idt
C
i R u u o
i
1
1
1
消除中间变量,并化简有
u C
u R u C C u R R i
i
o
o
2
2
2
1
2
1
1)11()(+=+++ 2.4 求图(题2.4)所示机械系统的微分方程。图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
解:设系统输入为M (即),输出θ(即),分别对圆盘和质块进行动力学分析,列写动力学方程如下:
)(x R Rk C J M m
-++=θθθ
x
c x m x R k +=-)(θ 消除中间变量x ,即可得到系统动力学方程
KM M c M
m C R c k KJ c C km R cJ mC mJ m
m
m
++=++-++++ θ
θθθ)(2
2
)()()
4(2.5 输出y(t)及输入x(t)的关系为y(t)= 2x(t)+0.5x 3(t)。 (1)求当工作点为x o =0,x o =1,x o =2时相应的稳态时输出值; (2)在这些工作点处作小偏差线性化模型,并以对工作的偏差来定义x 和y ,写出新的线性化模型。 解: (1) 将 x o =0,x o =1,x o =2分别代入y(t)= 2x(t)+0.5x 3
(t)中,即当
工作点为
x
o
=0,
x
o
=1,
x
o
=2时相应的稳态输出值分别为
0=y o
,5.20
=y , 8=y o
。
(2) 根据非线性系统线性化的方法有,在工作点)(,y x o
o
附近,将
非线性函数展开成泰勒级数,并略去高阶项得
x
x x x y y x x o
o
o
o
??=+++=?+|)5.12(5.022
3
∴
x
x y x
x o
?
?=+=?|)5.12(2
若令x x
?=
,有 x x y )5.12(20
+=
当工作点为0=
x o 时,
x
x x y 2)5.12(20=+= 当工作点为1=x o 时, x x x y 5.3)5.12(20=+=
当工作点为2
=
x o 时,
x x x y 8)5.12(2
=+=
2.6已知滑阀节流口流量方程式为,式中.Q 为通过节流阀流口的流量;p 为节流阀流口的前后油压差;x v 为节流阀的位移量;c 为疏量
系数;w 为节流口面积梯度;ρ为油密度。试以Q 及p 为变量(即将Q 作为P 的函数)将节流阀流量方程线性化。
解:利用小偏差线性化的概念,将函数Q=F(x v ,p)在预定工作点F(x o ,p o )处按泰勒级数展开为
+??÷????+=?
?p p x x p x x F p x F Q o vo P
F
v o vo v
o vo ),()(),()(
),(
消除高阶项,有
p
p x x p x x F p x F Q o vo P
F
v o vo v
o vo ??+????+=?
?),()(),()(
),(
∴),(),(p x F p x F Q o
vo v -=?
)
,(),()(),()(
),(p x F p p x x p x x F p x F o vo o vo P
F
v o vo v
o vo -??+????+=?
?
p
p x x p x x F o vo P
F
v o vo v
??+????=?
?),()(),()(
若令)(p x x F K o
vo v
,|)(1
??=,)(p x F K o vo ,|)p (2
??=, p
K
x K Q
v
?
????+=2
1
将上式改写为增量方程的形式
p
K x K Q v
??+=2
1
2.7 已知系统的动力学方程如下,试写出它们的传递函数Y(s)/R(s)。
(1))(2)()(500)(50)(15)(t r t r t y t y t y t y
+=+++
(2))(5.0)(25)(5t r t y
t y =+ (3))(5.0)(25)(t r t y
t y =+ (4))(4)(4)(6)(3)(t r dt t y t y t y
t y
=+++? 解:根据传递函数的定义,求系统的传递函数,只需将其动力学方程两边分别在零初始条件下进行拉式变换,然后求Y(s)/R(s)。 (1)
)
(2)()(500)(50)(15)(2
2
3
s sR s R s s Y s sY s Y s s Y s +=+++
∴500
50152)(/)(2
2
2
++++=s s s s s s R s Y
(2) )
(5.0)(25)(52
s sR s sY s Y s
=+
∴s
s s s R s Y 2555.0)(/)(2
+=
(3)
)
(5.0)(25)(2
s R s SY S Y s =+
∴s
s s R S Y 255.0)(/)(2
+=
(4)
)(4)(1
4)(6)(3)(2
s Y s Y s
s Y S sY s Y s =+++
∴4
634)(/)(2
3+++=s s s s
s R s Y
2.8 如图(题2.8)为汽车或摩托车悬浮系统简化的物理模型,试以位移x 为输入量,位移y 为输出量,求系统的传递函数Y(s)/X(s)。
2.9 试分析当反馈环节H(s)=1,前向通道传递函数G(s)分别为惯性环节、微分环节、积分环节时,输入、输出的闭环传递函数。
解:由于惯性环节、微分环节、积分环节的传递函数分别为 ,Ts s G =)(,,而闭环传递函数为
)
()(1)
()(s H s G s G s G B ?±=
,则
(1)当反馈环节H(s)=1,前向通道传递函数G(s)为惯性环节时,
K Ts K Ts K Ts K
s
H s G s G s G B ±+=+±
+=?±=
1111)()(1)()(
(2)当反馈环节H(s)=1,前向通道传递函数G(s)为微分环节时,
Ts
Ts
s H s G s G s G B
±=?±=1)()(1)()(
(3)当反馈环节H(s)=1,前向通道传递函数G(s)为积分环节时,
K s K s
K s K
s H s G s G s G B ±=±=?±=
1)()(1)()(
2.10 证明图(题2.10)及图(题2.3(a )所示系统是相似系统(即证明两系统的传递函数具有相同形式)。
解:对题2.4(a)系统,可列出相应的方程。
)1(12
2
?+=idt
C
R u o
)2(1
1i
R u u o
i
=-
)
3()(1
1
1
dt
i i C
u u o
i
?-=-
对以上三式分别作Laplce 别换,并注意到初始条件为零,即
0)0()0(0)0()0(21
====I
I I
I
则
)
(4)
()1()()()(2222
s I s
C R s
C s I s I R s U O
+
=+
= )
(5)()()(1
s I R S U s U i
O
i
=- )(6)
()()()(11s
C s I s C s I S U s U O
i
-=
- ,得
)
7()()()(111110
s I s
C R s U s U s
C i =-??
????
R ?)6(1, 得 )8()()
()
()(11111
1s I s
C R s C s I R s U s U R i -=
-??????
)
8()7(+, 得 )()
()()1(
11110
s I s
C R s U s U R s
C i
=
-+??
????
即 )(1)(1)()(11111111s I C R R s I s
C R s C s C R s U s U O
i
+=+?=-
则 )
9()
(1)()
(11
10s I C R R s U s U i ++
=
将(4)式中的)(0s U 代入(9)式
)(1)()1()(11
122s I C R R s I s
C R s U i
++
+
=
)()11
(111
22s I s
C R R s C R ++
+
=
再用(4)式及上式相比以消去)(s I ,即得电系统的传递函数为
)
())
1(1()
()1
()()
()(111222210s I s C R R s C R s I s C R s U s U s G ++++
==
)
1(11111
2222s C R R s C R s
C R +++
+
=
而本题中,引入中间变量x,依动力学知识有
c
x x c x x k x x o i i
)-()()-(1
2
o
2
=-+
x k c x x
i =-1
1
o
)(
对上二式分别进行拉式变换有
[]sc
s X s X s s X sc s X X k O i
i
1
2
)()()(X -)()(02-=+-??
??????????
s
c k s X s c s X +=
1101)()(
消除)(s X 有
s
k
c c s k c s k c s c k s c k s c k s c k s X s X s G i 1
11222211112
22201)()()(++++=
++++==
比较两系统的传递函数有
R c
22
?R c 11?
故这两个系统为相似系统。
2.11 一齿轮系如图(题2.11)所示。图中,z 1、z 2、z 3和z 4分别为各齿轮齿数;J 1、J 2、和J 3表示各种传动轴上的转动惯量,θ1、
θ
2
和θ3为各轴的角位移;M m 是电动机输出转矩。试列写折算到电
动轴上的齿轮系的运动方程。
2.12 求图(题2.12)所示两系统的传递函数。
图(题2.12) 解:(1)由图(a)中系统,可得动力学方程为
)()()()(t x c t x m k t x t x o o o i +=-??
???? 作Laplce 别换,得
)()()()(2s csX s X s m k s X s X o o o i +=-??
???? 则有 )/()(/)()(20k
cs ms k s X s X s G i ++==
(2)由图(b)中系统,设i 为电网络的电流,可得方程为
?++=idt
C
dt di L Ri u i
1
作Laplce )(1)()()(s I Cs
s LsI s RI s U i
++=
消除中间变量有 1
1
)(/)()(2
0++==RCs LCs s U s U s G i
2.13 某直流调速系统如图(题2.13)所示,u s 为给定输入量,电动机转速n 为系统的输出量,电动机的负载转矩T L 为系统的扰动量。各环节的微分方程:
比较环节 u u u fn s n -=?
比例调节器 u K u n k c ?= (K k 为放大系数) 晶闸管触发整流装置 u K u c k d = (K s 为整流增益) 电动机电枢回路 e dt
di L R i u a
d d a d ++=
(R d 为电枢回路电阻,L d 为电枢回路电感,i a 为电枢电流 ) 电枢反电势 n K e d = (K d 为反电势系数)
电磁转矩
i
K M a
m e
= (K m 为转矩系数)
负载平衡方程 (J G 为转动惯量,T L 为负 载转矩)
测速电动机 n u fn α= (α为转速反馈系数)
试根据所给出的微分方程,绘制各环节相应的传递函数方框图和控制系数的传递函数方框图,并由方框图求取传递函数和。
2.14 试绘制图(题2.14)所示机械系统传递函数方框图。
2.15 若系统传递函数方框图为图(题2.15)。
(1) 求以)(s R 为输入,当0)(=s N 时,分别以)(s C 、
)(s Y 、)(s B 、)(s E 为输出的闭环传递函数;
(2) 求以)(s N 为输入,当0)(=s R 时,分别以)(s C 、
)(s Y 、)(s B 、)
(s E 为输出的闭环传递函数;
(3) 比较以上各传递函数的分母,从中可以得出什么结论?
图(题2.15)
解:(1)求以)(s R 为输入,当0)(=s N 时: 若以)(s C 为输出,有
)
()()(1)()()()
()(2121s H s G s G s G s G s R s C s G C
+==
若以)(s Y 为输出,有
)
()()(1)()()()(211s H s G s G s G s R s Y s G Y
+==
若以)(s B 为输出,有
)
()()(1)
()()()()()(2121s H s G s G s H s G s G s R s B s G B
+==
若以)(s E 为输出,有
)
()()(11
)()()(21s H s G s G s R s E s G E
+==
(2)求以)(s N 为输入,当0)(=s R 时: 若以)(s C 为输出,有
)
()()(1)()()()(212s H s G s G s G s R s C s G C
+==
若以)(s Y 为输出,有
)
()()(1)
()()()()()(2121s H s G s G s H s G s G s R s Y s G Y
+-==
若以)(s B 为输出,有
)
()()(1)()()()()(212s H s G s G s H s G s R s B s G B
+==
若以)(s E 为输出,有
)
()()(1)()()()()(212s H s G s G s H s G s R s E s G E
+-==
(3)从上可知:对于同一个闭环系统,当输入的取法不同时,前向通道的传递出数不同,反馈回路的传递函数不同,系统的传递函数
也不同,但系统的传递函数的分母保持不变,这是因为这一分母反映了系统的固有特性,而及外界无关。
2.16 已知某系统的传递函数方框图为图(题2.16),其中,
)(s X i
为输入,)(s X O
为输出,N(s)为干扰,试问:G(s)为何值时,
系统可以消除干扰的影响。
图(题2.16)
解:方法一:根据线性系统的叠加原理,令0)(=s X i ,N(s)为输入,系统的输出为
[])()()()()(241s G K s G s G s N s X B B oN
-=
其中
K K K s Ts K K K Ts K s K K Ts K S K K s G B
3
221321321
3
21
1
11)(1++=+++=
K K K s Ts s K Ts K s K K Ts K s G B
3
2213321
3
1
11)(2++=+++=
∴
[])()()()()(241s G K s G s G s N s X B B oN
-=
K
K K s Ts s K K K s G K K K 3
21
221432
1)(++???
???
??-=
令
0)(=s X oN
有 方法二:令0)
(=s X i ,N(s)为输入,则系统的传递函数方框图
可以表示成图(题2.16.b )所示。
图(题2.16.b )
根据相加点前后移动的规则可以将其进一步简化成图(题2 .16. c )和图(题2.16.d )所示的形式。
图(题2.16.c )
图(题2.16.d )
因此,系统在N(s)为输入时的传递函数为
K
K K s Ts s
K K K s G K K K s G N
3
212214321)()(++???
???
??-=
同样可得时,系统可消除干扰的影响。
2.17 系统结构如图(题2.17)所示,求系统传递函数。
)
1(
1
)
(
)
(
)
(
)
(
3
2
1
2
4
1
G
G
G
G
G
G
s
R
s
C
s
G B
+
+
+
=
=
2.18 求出(题2.18)所示系统的传递函数)
(
/)
(s
X
s
X i
O。
图(题2.18)
解:方法一:利用梅逊公式,可得
H
G
G
H
G
G
H
G
G
G
H
G
G
G
G
G
G
G
G
s
X
s
X
s
G
i
O
B
4
4
3
1
3
2
2
3
2
1
3
4
3
2
1
4
3
2
1
1
)
(
)
(
)
(
+
-
+
-
=
=