永磁同步电机仿真模型
永磁同步电机的仿真模型
1、永磁同步电机介绍
永磁同步电动机(permanentMagnets synchronousMotor, PMSM>,转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT>的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。
永磁同步电动机按转子形状可以分为两类:凸极式永磁同步电机和隐极式永磁同步电机。它们的区别在于转子磁极所在的位置,凸极式永磁同步电机转子磁极是突起在轴上的,其直轴和交轴电感参数不相等"而隐极式永磁同步电机的转子磁极是内置在轴内的,直轴和交轴电感参数相等"凸极式转子具有明显的磁极,定子和转子之间的气隙是不均匀的,因此其磁路与转子的位置有关。
2、永磁同步电机的控制方法
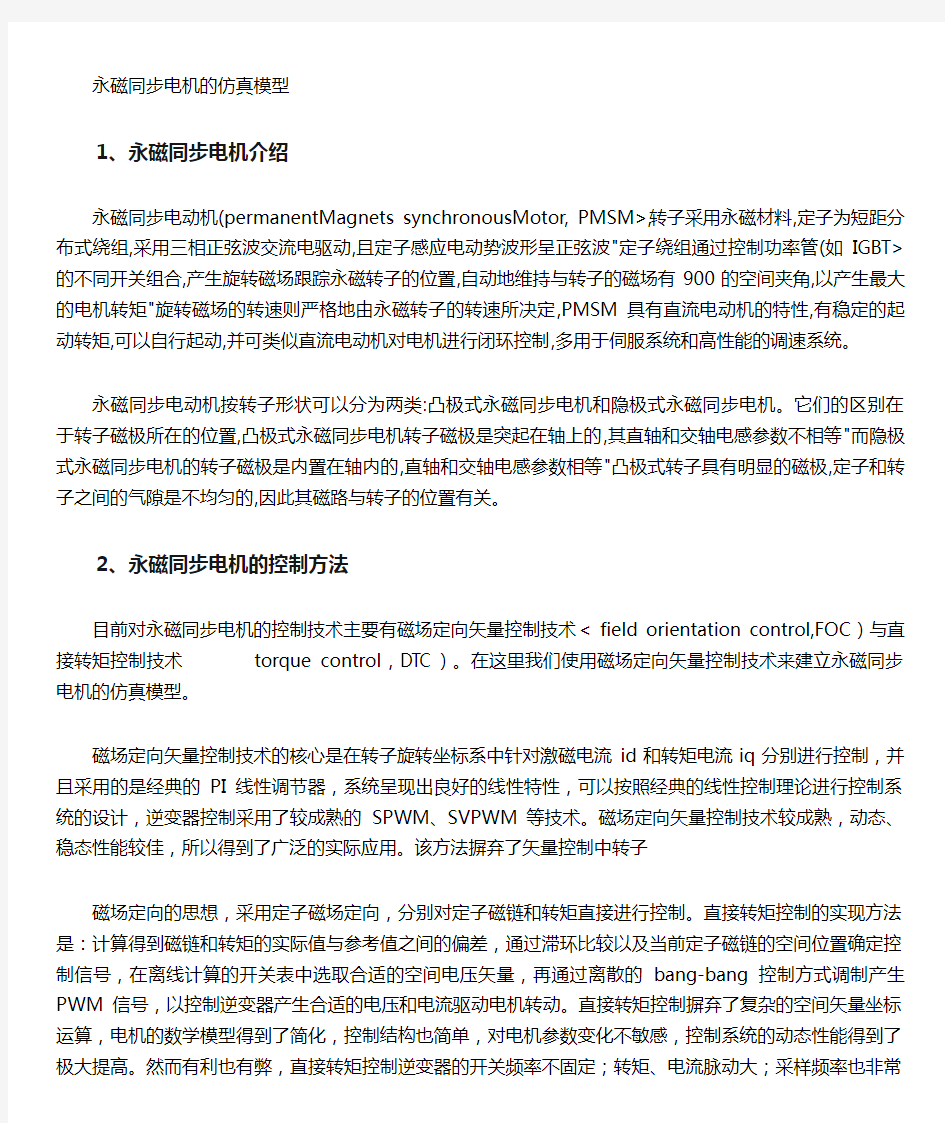
目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术< field orientation control,FOC)与直接转矩控制技术 磁场定向矢量控制技术的核心是在转子旋转坐标系中针对激磁电流id和转矩电流iq分别进行控制,并且采用的是经典的PI线性调节器,系统呈现出良好的线性特性,可以按照经典的线性控制理论进行控制系统的设计,逆变器控制采用了较成熟的SPWM、SVPWM等技术。磁场定向矢量控制技术较成熟,动态、稳态性能较佳,所以得到了广泛的实际应用。该方法摒弃了矢量控制中转子磁场定向的思想,采用定子磁场定向,分别对定子磁链和转矩直接进行控制。直接转矩控制的实现方法是:计算得到磁链和转矩的实际值与参考值之间的偏差,通过滞环比较以及当前定子磁链的空间位置确定控制信号,在离线计算的开关表中选取合适的空间电压矢量,再通过离散的bang-bang 控制方式调制产生PWM 信号,以控制逆变器产生合适的电压和电流驱动电机转动。直接转矩控制摒弃了复杂的空间矢量坐标运算,电机的数学模型得到了简化,控制结构也简单,对电机参数变化不敏感,控制系统的动态性能得到了极大提高。然而有利也有弊,直接转矩控制逆变器的开关频率不固定;转矩、电流脉动大;采样频率也非常高。 下图为磁场定向矢量控制技术的原理图。 FOC控制技术的原理:原理图中涉及到双反馈,第一层反馈为转速反馈:设定电机转速初始值作为给定值,然后与反馈的实际值<位置传感器采集到的位移微分得到)进行比较,得到的差值输入PI控制器进行控制,得到交轴电流iq。同时三相绕组输出的电流iA,iB,iC经过clarke变换和park变化得到iq和id的实际值,分别与给定值进行比较,将比较后的值再进行park转换,得到的结果经过SVPWM技术调制之后输入到逆变器,继而可以驱动三相电机。 图2.1 磁场定向矢量控制技术原理 3、基于FOC技术的永磁同步电机建模 在这里采用的是最简单的id=0的控制方法。Id=0时,从电动机端口看,永磁同步电机相当于一台他励的直流电动机,定子电流中只有交轴分量,而且定子磁动势空间矢量与永磁体磁动势空间矢量正交,电动机转矩中只有永磁转矩分量。因为电磁转矩仅仅依赖交轴电流,从而实现了转矩表达式中的交直轴电流解耦。 下图为建立的基于FOC控制技术的永磁同步电机SIMULINK仿真模型 图2.2 基于FOC技术的永磁同步电机SIMULINK模型 控制模型主要包括转速给定部分,比例积分 3.1转速给定部分 转速给定模块使用SIMULINK中的常数 给定的速度要输入到电角速度计算模块 rad/s)。设定电动机极对数为4,则其参数为2*pi*4/60。 图2.3 速度给定部分 图2.4 电角速度计算模块的参数设定 3.2比例积分 调速系统实施转速闭环控制,转速比例积分调节器中的比例模块设置比例参数,积分模块设置积分参数。调节器内同时设置了内限幅和外限幅模块 图2.5 PI模块的参数设定 图2.6 PI模块的内部结构 图2.7 Saturation的参数设置 3.3坐标转换模块 在三相静止坐标系下分析永磁同步电机的数学模型存在着许多难以克服的困难,引入空间矢量坐标变换理论可以简化其数学模型,并能够很容易的分析永磁同步电机的动态特性,空间坐标变换矢量图如图2-4 所示,图中fs为空间矢量,可为电压、电流、磁链等空间物理量,ωe 为转子旋转角速度,θe 为转子轴线与 A 相绕组轴线的夹角。 图2.8 空间坐标变换矢量图 按照 f 不变的原则,可得到三相静止坐标系 abc 变换到两相静止坐标系αβ的clark 变换矩阵为: clark 逆变换矩阵为: 同理若以转子磁链轴线方向为坐标系的横轴,称为直轴 park 逆变换矩阵为: 根据上述坐标转换原理,我们建立dq到abc坐标系和abc到dq坐标系的转换模块。如下图: 图2.9 dq坐标系到三相静止坐标系变换模块 图2.10 dq坐标系到三相静止坐标系变换模块内部实现 图2.11 三相静止坐标系到dq坐标系变换模块 图2.12 三相静止坐标系到dq坐标系变换模块的内部实现 3.4逆变器控制模块 采用电流滞环脉冲宽度调制方法,该模块输入为三相相电流给定值和三相相电流实际值,输出为三相相电压。其内部连接图如图所示: 图2.13CHBPWM逆变器模块内部连接图 三相比较模块相同,其中比较模块通过比较A相给定的电流值和A相实际电流得出逆变器输出的A相相电压值,其内部连接图如图所示: 图2.14比较模块内部连接图 其中,传递函数模块 图2.15 继电器参数设置 3.5电动机模型 在SIMULINK中对永磁同步电机进行仿真建模通常采用以下三种方法: <1)在SIMULINK中内部提供的PMSM模型,它包含在电力系统库的电动机库中。这种方法简单,方便,适于快熟创建永磁同步电动机调速系统,但因为模型已经封装好,不能随意修改,同时也不方便研究PMWM内部的建模方法。 <2)使用SIMULINK library库里已有的分离模块进行组合搭建电机模型,该方法思路清晰、简单、直观,但需要较多的模块,连线较多且不利于差错,油漆是复杂的数学模型。因此,本方法适用于简单的、小规模系统的仿真系统建模。 <3)用s-函数模块构造模型。该方法基于数学表达式,容易修改,方式灵活。这种模型处理能力强,可以方便地构建复杂的动态系统,非常适合PMSM的访真分析。 我们采用第三种方法进行建模 S函数模块位于SIMULINK模块库的用户自定义函数子目录下,s函数可以用MATLAB语言编写,也可以用C,C++等语言编写。它有特定的结构形式。这里用MATLAB语言编写,此时S函数与MATLAB函数不同的只是其特定的结构模式。 具体的s函数见附件。 图2.16 永磁同步电机模型 为使用方便,把整个模型建成子系统,同时为方便输入电动机的各项参数,使用风转子系统 图2.17 S函数构建的PMSM模块内部连接图 子系统内部使用s函数模块,设置s函数模块调用s函数名为PMSMdq,s函数的参数设为电动机的参数。点击edit可以进入s函数编写界面,进行修改。 需要注意的是,s函数的文件必须和PMSM仿真的模型放在同一文件夹下,否则会出现仿真错误的情况。 图2.18 S函数参数对话框 仿真时,PMSM的电动机参数设为:定子绕组R1为0.875欧;直轴电感Ld为8.5mH;交轴电感Lq为8.5mH;转子永磁体在定子绕组中产生的磁链为0.175Wb;极对数np为4.负载转矩初始值为1N.m,在0.04s时阶跃为5N.m。转矩的输入为阶跃函数。参数设置如下 图2.19 PMSM参数设置对话框 4、永磁同步电机控制模型仿真 将仿真时间设为0.06s,然后进行仿真,得到的仿真结果如下 图4.1 输入的阶跃扭矩信号 图4.2 输出的转矩信号 图4.3 输出的三相相电流 图4.4 输出的电角速度信号 图4.5 输出的电机转速 可以看出在起动过程中,电动机转矩上升到最大值以后保持在限幅值,此过程中电动机的转速迅速上升。加速结束后,电动机进入稳态运行,电动机的电磁转矩与负载转矩平衡。在负载突加的时候,电动机转矩迅速上升并与负载相平衡,然后迪纳冬季又重新进入稳态运行。 电气传动系统的响应很快,这是因为控制系统中的电流闭环控制响应比较快,动态性能好。附件 function[ sys, x0, str, ts]=PMSMdq(t,x,u,flag,parameters,x0_in> %PMSM model. %parameters。 %ld,lq:inductance in dp reference of frame %r:stater resistance %psi_f:flux in webers by PM on rotor %p:number of pole pairs %j:inertia of motor and load %mu_f:viscous friction %inputs: %ud,uq:voltages in dp reference of frame %tl:torque of load %inner variants: %id,iq currents in dp reference of frame %ud,uq:voltage int dp reference of frame %wr:angular velocity of the rotor %te:electronmagnetic torque %theta: position of rotor %outputs: %wr:angular velocity of the rotor %te:electronmagnetic torque %id,iq currents in dp reference of frame %theta :position of rotor %---------------------------- %u(1 2 3>= %ud uq tl %parameters (1 2 3 4 5 6 7>= % ld lq r psi_f p j mu_f %sys(1 2 3 4 5 >= % wr te id iq theta %x(1 2 3 4 >= % id iq wr theta switch flag case 0 [sys x0 str ts]=mdlInitializeSizes(x0_in>。%iniatialization case 1 %calculate the derivatives sys=mdlDerivatives(x,u,parameters>。 case 3 %output sys=mdlOutputs(x,u,parameters>。 case{2,4,9} %unused flags sys=[]。 otherwise %Error handling error(['Unhandled flag=',num2str(flag>]>。 end %end of PMSMdq %----------------------------------- %mdlInitializeSizes %---------------------------------- function[sys,x0,str,ts]=mdlInitializeSizes(x0_in> %------------------------------------- %u(1 2 3>= % ud uq tl %parameters(1 2 3 4 5 6 7 >= % ld lq r psi_f p j mu_f %x( 1 2 3 4>= % id iq wr theta sizes=simsizes。 sizes.NumContStates=4。 sizes.NumDiscStates=0。 sizes.NumOutputs=5。 sizes.NumInputs=3。 sizes.DirFeedthrough=0。 sizes.NumSampleTimes=1。 sys=simsizes(sizes>。 x0=x0_in。 str=[]。 ts=[0 0]。 %End of mdlInitializeSizes. %--------------------------- %mdlDerivatives %Return the derivatives for the continuous states %----------------------------- function[ sys ]=mdlDerivatives(x,u,parameters> %----------------------------- %u( 1 2 3>= % ud uq tl %parameters(1 2 3 4 5 6 7>= % ld lq r psi_f p j mu_f %sys(1 2 3 4 5>= % wr te id iq theta %x(1 2 3 4>= % id iq wr theta %id'=ud/ld-r*iq/lq+lq*p*wr*iq/ld sys(1>=u(1>/parameters(1>- parameters(3>*x(1>/parameters(1>+parameters(2>*parameters(5>*x(3>*x(2>/p arameters(1>。 %iq'=uq/lq-r*iq/lq-ld*p*wr*id/lq-psi_f*p*wr/lq sys(2>=u(2>/parameters(2>-parameters(3>*x(2>/parameters(2>-parameters(1>*parameters(5>*x(3>*x(1>/parameters(2>- parameters(4>*parameters(5>*x(3>/parameters(2>。 %te=1.5*p*[psi_f*iq+(ld-lq>*id*iq] te=1.5*parameters(5>*(parameters(4>*x(2>+(parameters(1>- parameters(2>>*x(1>*x(2>>。 %wr'=(te-mu_f*wr-tl>/j sys(3>=(te-parameters(7>*x(3>-u(3>>/parameters(6>。 %theta'=p*wr sys(4>=parameters(5>*x(3>。 %End of mdlDerivatives %------------------------------------------- %mdlOutputs %Return the block outputs. %----------------------------------------- function sys=mdlOutputs(x,u,parameters,te> %------------------------------------------ %u(1 2 3>= % ud uq tl %parameters(1 2 3 4 5 6 7>= % ld lq r psi_f p j mu_f %sys(1 2 3 4 5>= % wr te id iq theta %x(1 2 3 4 >= % id iq wr theta %output wr sys(1>=x(3>。 %output te %te=1.5*p*[psi_f*iq+(ld-lq>*id*iq] te=1.5*parameters(5>*(parameters(4>*x(2>+(parameters(1>-parameters(2>>*x(1>*x(2>>。 sys(2>=te。 %output idq sys(3>=x(1>。%id sys(4>=x(2>。%iq %out theta sys(5>=x(4>。 %End of mdlOutputs 11KW 变频起动永磁同步电动机电磁设计程序 及电磁仿真 1永磁同步电动机电磁设计程序 1.1额定数据和技术要求 除特殊注明外,电磁计算程序中的单位均按目前电机行业电磁计算时习惯使用的单位,尺寸以cm(厘米)、面积以cm 2(平方厘米)、电压以V (伏)、电流以A (安)、功率和损耗以(瓦)、电阻和电抗以Ω(欧姆)、磁通以Wb(韦伯)、磁密以T(特斯拉)、磁场强度以A/cm(安培/厘米)、转矩以N (牛顿)为单位。 1额定功率kw P n 11= 2相数 31=m 3额定线电压V U N 3801= 额定相电压Y 接法V U U N N 39.2193/1== 4额定频率50f HZ = 5电动机的极对数P =2 6额定效率87.0, =N η 7额定功率因数78.0cos , =N ? 8失步转矩倍数2.2* =poN T 9起动转矩倍数2.2* =stN T 10起动电流倍数2.2* =stN I 11额定相电流62.2478.087.039.21931011cos 105 , ,15=????=?=A U m P I N N N N N ?η 12额定转速1000=N n r/min 13额定转矩m N n P T N N N .039.1051000 11 55.91055.93=?=?= 14绝缘等级:B 级 15绕组形式:双层叠绕Y 接法 1.2主要尺寸 16铁心材料DW540-50硅钢片 17转子磁路结构形式:表贴式 18气隙长度cm 07.0=δ 19定子外径cm D 261= 20定子内径cm D i 181= 21转子外径86.17)07.0218(212=?-=-=cm D D i δ 22转子内径cm D i 62= 23定,转子铁心长度cm l l 1521== 24铁心计算长度cm l l a 152== 铁心有效长度cm cm l l a ef 14.15)07.0215(2=?+=+=δ 25定子槽数136Q = 26定子每极每相槽数332/362/11??==p m Q q =2 27极距cm P D i p 728.932/1814.32/1=??==πτ 28定子槽形:梨形槽 定子槽尺寸 cm h cm r cm b cm b cm h 72.153.078.038.008.002110101===== 29定子齿距cm Q D t i 5708.136 181 1 1== = π π 调速永磁同步电动机的电磁设计与磁场分析 1 引言 与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率 密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航 天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。 随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电 动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速 永磁同步电动机也应运而生。变频调速永磁同步电动机可分为两类,一类是反电 动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另 一类是两种波形都是正弦波的一般意义上的永磁同步电动机。这类电机通常由变 频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。 本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电 动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行 了瞬态特性分析。 2 调速永磁同步电动机的电磁设计 2.1 额定数据和技术要求 调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子 冲片设计、定子绕组的设计、永磁体的设计等。通过改变电机的各个参数来提高 永磁同步电动机的效率η、功率因数cos ?、起动转矩st T 和最大转矩max T 。本例所设计永磁同步电动机的额定数据及其性能指标如下: 额定数据 数值 额定功率 N 30kw P = 相数 =3m 额定线电压 N1=380V U 额定频率 =50Hz f 极对数 =3p 额定效率 N =0.94η 额定功率因数 N cos =0.95? 绝缘等级 B 级 计算额定数据: 第29卷第9期中国电机工程学报V ol.29 No.9 Mar.25, 2009 98 2009年3月25日 Proceedings of the CSEE ?2009 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2009 09-0098-06 中图分类号:TM 351;TM 359 文献标志码:A 学科分类号:470?40 永磁直线电机精确相变量建模方法 曾理湛1,陈学东1,李长诗2,农先鹏1,伞晓刚1 (1. 数字制造装备与技术国家重点实验室(华中科技大学,湖北省武汉市 430074; 2. 郑州轻工业学院机电工程学院,河南省郑州市 450002 Accurate Phase Variable Modeling of PM Linear Motors ZENG Li-zhan1, CHEN Xue-dong1, LI Chang-shi2, NONG Xian-peng1, SAN Xiao-gang1 (1. State Key Laboratory of Digital Manufacturing Equipment & Technology (Huazhong University of Science and Technology, Wuhan 430074, Hubei Province, China; 2. College of Mechanical and Electrical Engineering, Zhengzhou University of Light Industry, Zhengzhou 450002, Henan Province, China ABSTRACT: This paper proposes a general finite element (FE based phase variable modeling method of permanent magnet (PM linear motors for the accurate dynamic simulation of drive systems. A general phase variable model of PM linear motors is established taking account of the effects of the nonideal geometrical structure on the thrust force, in which the mover position dependent variables are obtained from FE 第10卷 第1期2006年1月 电 机 与 控 制 学 报 EL EC TR IC MACH I N ES AND CON TROL Vol 110No 11Jan .2006 一种微小型永磁直流直线电机 王坤东, 颜国正 (上海交通大学电信与电气工程学院820所,上海200030) 摘 要:针对永磁直流直线电机的微型化问题,提出了近似拼接的设计方案,优化了结构参数,并 加工出样机进行了试验。在尺寸所限下,该电机使用多个长方体永磁块拼接的正八边形来近似逼近全径向磁化管形磁铁励磁。利用有限元分析软件Max W ell910优化了气隙和磁铁厚度等结构参数。对样机进行了试验分析,结果表明电机驱动力和电流呈线性关系,在整个行程中,输出力均匀,驱动力在电流01004A 时可达0172N,线圈温度在5516°C 。关键词:微小型;永磁;直线电机;有限元优化 中图分类号:T M351 文献标识码:A 文章编号:1007-449X (2006)01-0070-04 A m i n i a ture per manent magnet li n ear DC motor WANG Kun 2dong, Y AN Guo 2zheng (School of Electrical and I nf or mati on Eng .,Shanghai J iaot ong Univ .,Shanghai 200030,China ) Abstract:This paper p resented a method based on j ointed per manents for m iniature of DC linear mot or .Structural para meters were op ti m ized .Pr ot otype was manufactured t o make s ome experi m ents .Under the constraint of m icr o di m ensi on,several rectangular per manent magnets were j oined t o be octagon,whose field app r oaches the filed of tube 2shaped per manent magnetized at radial directi on .Based on the FEA s oft w are Max W ell 910,the structural para meters such as dep th of air gap and per manent magnet were op 2ti m ized .The characters of mot or are analyzed thr ough experi m ents .Research de monstrates that driving f orce is p r oporti onal with the current,and driving force is stable in the whole str oke,and driving force reaches 0172N when the current strength is 01004A ,and the te mperature of coil rises t o 5516°C .Key words:m iniature;per manent;linear mot or;FE op ti m is m 收稿日期:2004-10-21;修订日期:2005-06-15 基金项目:国家高技术研究发展计划(863)资助项目(2001AA422210) 作者简介:王坤东(1978-),男,博士研究生,研究方向为微型特种机器人; 颜国正(1960-),男,博士后、教授、博士生导师,研究方向为特种机器人、仿生机械。 1 引 言 在微小空间进行作业的行走机构,如工业细小管道或人体消化道的检测机器人等,要求直径在10~15mm 之间,同时对驱动技术也提出了新的要求, 如驱动力大、控制方便、可靠等[1,2] 。微型旋转电机受尺寸的限制,加上将旋转运动变为直线运动的中间机构也占有一定空间,因此将外形尺寸控制在直径为10mm 以下比较困难 [3] 。压电驱动器行程较 短,一般都是在μm 量级,存在如何将位移进行放大 的问题,而且驱动力很难控制[4] 。形状记忆合金驱动器由于记忆合金的加热变形—冷却回复的时间较 长,因此速度较慢[5] 。直线电机是近年来出现的一种新型驱动技术,它将电能直接转换为直线运动的机械能,不需要运动转换的中间机构,因此结构尺寸上能够进一步减小。直线电机种类繁多,其中永磁直流直线电机由永磁励磁,结构简单,控制方便。从现有的产品看,还没有出现直径在10mm 以下的圆 摘 要 直线电机在各行各业中发挥着越来越重要的作用,特别是在机床进给驱动系统中。本 文以平板式交流永磁同步直线电机为研究对象,从电机机体到伺服驱动系统的软、硬件设 计作了深入研究。 本文首先介绍了交流永磁同步直线电机机体设计过程中电枢绕组、铝芯和定子磁钢的 设计和改进方法,较大程度上减小了推力波动,并且结合大推力直线电机的特点设计了方 便有效的装配过程。 建立交流永磁同步直线电机的数学模型,在此基础上分析了当今最通用的伺服控制策 略,选择了矢量控制方法。确定0 d i 的矢量控制实现形式。通过SVPWM 方法进行脉宽调 制,合成三相正弦波。选用TI 公司2000系列最新DSP TMS320F2812,深入研究了以上算法 在DSP 中的实现形式。采用了C 语言和汇编语言混合编程的实现方法。在功率放大装置中, 以智能功率模块IPM 为核心,设计了功率伺服驱动系统。还包括电流采样、光电隔离、过 压欠压保护和电源模块等。 由于知识和能力的限制,本次课题只对直线电机做一些理论研究。 关键词:永磁同步直线电机 DSP SVPWM 矢量控制 Abstract Line motors are playing a more and more important role in all kinds of trade , especially in machine tool feed system. We carry out our study in motor , software and hardware servo system based on flat AC permanent magnet synchronous linear motor(PMSLM). First introduce the design method of armature ,core of al and magnet which can minish the thrust ripples, then introduce the means of assembly base on high thrust permanent magnet synchronous motors. To ensure the accuracy to a high requirements and get a wide speed range, we choose the dsp of Texas Instruments named TMS320F2812 which is the core of the servo system .In the paper we set up mathematical model of PMSLM, then analyse the current control strategies and choose the vector control method which is realized by the method of 0 d i .The three phase sine wave is compounded by space voltage pulse width modulation(SVPWM).The arithmetic realized by C language and assembly language in DSP. Intelligent Power Model (IPM) is the core of the power amplification circuit system which also contains current sampling circuit, photoelectric-isolation circuits, over-voltage protection circuits, under-voltage protection circuits and power supply. As a result of the knowledge and ability limit, this topic only does a fundamental research to the linear motor. Key words: permanent magnet synchronous linear motor(PMSLM), DSP, SVPWM, vector control 交流永磁同步直线电机介绍及其控制系统设计 制造业中需要的线形驱动力,传统的方法是用旋转电机加滚珠丝杠的方式提供。实践证明,在许多高精密、高速度场合,这种驱动已经显露出不足。在这种情况下直线电机应运而生。直线电机直接产生直线运动,没有中间转换环节,动力是在气隙磁场中直接产生的,可获得比传统驱动机构高几倍的定位精度和快速响应速度。 本文是在我系研制的同步直线电机基础上进行基于矢量变换控制的驱动系统设计应用。 2. 交流永磁工作原理 直线电机的工作原理上相当于沿径向展开后的旋转电机。交流永磁同步直线电机通入三相交流电流后,会在气隙中产生磁场,若不考虑端部效应,磁场在直线方向呈正弦分布。行波磁场与次级相互作用产生电磁推力,使初级和次级产生相对运动。图1所示为开发设计的交流永磁同步直线电机。 3. 永磁同步直线电机矢量控制原理 由于矢量控制动态响应快,相比较标量控制,在很快的时间内就能达到稳态运行。经过30多年工业实践的考验、改进与提高,目前已经达到成熟阶段[3],成为交流伺服电机控制的首选方法。因此,直线电机采用了交流矢量控制驱动的方法。 直线电机初级的三相电压(U、V、W相)构成了三相初级坐标系(a,b,c 轴系),其中的三相绕组相角相差120?,即在水平方向上互差1/3极距。参照旋转电机矢量变换理论,设定两相初级坐标系(α-β轴系),由三相初级坐标系到直角坐标系转换称为Clark变换,见式(1)。 从静止坐标系到旋转坐标系的变换称为Park变换,见式(2)。反之称Park 逆变换。 θ是d轴与轴的夹角。根据旋转电机的Park变换理论和两电机结构比较。由于电机运动部分的不同,故直线电机动子相当于旋转电机定子,直线电机定子相当于旋转电机动子。所以在旋转电机中旋转坐标系固定在动子上,旋转坐标系随着电机转子一起同步旋转。在直线电机中,由运动相对性原理,动子的直线运动, 本文1996年12月10日收到 煤炭科学基金项目(94电10817) 综 述 稀土永磁材料及其在直线电机中的应用展望 焦留成 禹 沛 禹 涓 (焦作工学院 焦作454000) (焦作教育学院 焦作454151) (焦作工学院 焦作454000) Prospects for Rare -earth Permanent Magnet Materials and their Application in Linear Motors J iao L iucheng (Jiaozuo Institute of T echnolo gy ,Jiaozuo 454000)Yu P ei (Jiaozuo Educational Colleg e ,Jiao zuo 454151) Yu J uan (Jiaozuo Institute of T echno logy ,Jiaozuo 454000) 【摘 要】 介绍了稀土永磁材料的发展、磁性能及其在直线电机中的应用,指出稀土永磁直线电机将成为直线电机的一个重要发展方向。 【关键词】 稀土永磁材料 直线电机 永磁直线电机【Abst ract 】 Rar e -ear th perma nent magnet mater ials'development,per for mance and applicatio n in lin-ear mo tor s is intr oduced.Rar e -eart h per manent magnet linear mo to rs w ill be an impo rtant dev elo pment t rend of linear mo tor s . 【Keywords 】 rar e -eart h permanent magnet mater i-als linear moto rs perma nent mag net linear mo tor s 1前 言 稀土永磁材料以其优异的磁性能得到了广泛 的应用和开发。其中钕铁硼永磁材料尤以价格相对低廉,日益成为应用最广泛的稀土永磁材料。在钕铁硼永磁材料中,将近40%被用于电机行业。由于直线电机的应用范围不断扩大,稀土永磁材料在直线电机方面的应用也日益受到重视。稀土永磁材料在直线电机方面的应用,有着广阔的前景。 2稀土永磁材料 2.1稀土永磁材料的发展 永磁材料属基础材料,目前有铝镍钴金属永磁,铁氧体永磁和稀土永磁三大类。稀土永磁是稀土元素(镧、镨、钇、钐、镐……)与铁族元素的金属间化合物。第一代稀土永磁合金(SmCo 5)诞生于 60年代后期,70年代第二代稀土永磁合金(Sm 2Co 17)问世。这两种永磁材料虽然磁性能好,但 钐与钴价格昂贵,限制了它们的应用。1983年6月,日本住友特殊金属公司制成了第三代稀土永磁合金(NdFeB)。钕铁硼永磁材料具有优异的磁性能,同时由于钕资源丰富,又以廉价的铁代替钴,所以其价格相对低廉,市场竞争力强,便于推广应用。钕铁硼永磁材料的问世被列为1983年世界十大重要科技成果之一。 2.2钕铁硼永磁材料的磁性能 钕铁硼永磁材料的磁性能优异,兼有铝镍钴和铁氧体永磁的优点,具有很高的剩磁和矫顽力,以及很大的磁能积。目前,常用的稀土永磁材料的磁能积,Sm Co 5为127.36~183.08kJ/m 3,试验最高值达227.7kJ/m 3 ;Sm 2Co 17为159.2~238.8kJ/m 3 ,试验最高值达263kJ /m 3,NdFeB 为238.8~318.4kJ /m 3;试验最高值415.5kJ /m 3。在各种永磁材料中,钕铁硼的磁能积最高,其最大磁能积比铝镍钴的大5~8倍,比铁氧体大10~15倍,在同样的有效体积下,比电励磁的大5~8倍,仅次于超导励磁。 钕铁硼磁钢的剩磁B r 和矫顽力H c 均很高。商品钕铁硼的B r 为1.02~1.25T ,最高可达14.8T ,约是铁氧体永磁的3~5倍,约是铝镍钴永磁的1~2倍。商品钕铁硼的磁感应矫顽力H CB 为764.2~915kA/m ,内禀矫顽力H CM 为876~1671.6kA /m ,最高可达2244.7kA /m ,相当于铁氧体的5~10倍,铸造铝镍钴的5~15倍。各种永磁材料的 32 微特电机 1997年第2期 调速永磁同步电动机的电磁设计与磁场分析 1 引言 与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。 随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速永磁同步电动机也应运而生。变频调速永磁同步电动机可分为两类,一类是反电动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另一类是两种波形都是正弦波的一般意义上的永磁同步电动机。这类电机通常由变频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。 本文使用Ansoft Maxwell软件中的RMxprt模块进行了一种调速永磁同步电动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行了瞬态特性分析。 2 调速永磁同步电动机的电磁设计 2.1 额定数据和技术要求 调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子冲片设计、定子绕组的设计、永磁体的设计等。通过改变电机的各个参数来提高 T。本例所永磁同步电动机的效率η、功率因数cos?、起动转矩st T和最大转矩max 设计永磁同步电动机的额定数据及其性能指标如下: 计算额定数据: (1) 额定相电压:N 220V U U == (2) 额定相电流:3 N N N N N 1050.9A cos P I mU η??== (3) 同步转速:160=1000r /min f n p = (4) 额定转矩:3 N N 1 9.5510286.5N m P T n ?==g 2.2 主要尺寸和气隙长度的确定 永磁电机的主要尺寸包括定子内径和定子铁心有效长度,它们可由如下公式 估算得到: 2 i11P D L C n '= N N N cos E K P P η?'=, 6.1p Nm dp C K K AB δ α=' 式中,i1D 为定子内径,L 为定子铁心长度,P '为计算功率,C 为电机常数。 E K 为额定负载时感应电势与端电压的比值,本例取0.96;p α'为计算极弧系数, 初选0.8;Nm K 为气隙磁场的波形系数,当气隙磁场为正弦分布时等于1.11;dp K 为电枢的绕组系数,初选0.92。A 为电机的线负荷,B δ为气隙磁密,A 和B δ的 选择非常重要,直接影响电机的参数和性能,应从电机的综合技术经济指标出发 来选取最合适的A 和B δ值,本例初选为200A/cm,0.7T A B δ==。 由上式可初步确定电机的2i1D L ,但要想进一步确定i1D 和L 各自的值,还应选择主要尺寸比i1i122L L pL D D p λπτπ===,其中τ为极距。通常,中小型同步电动机的0.6~2.5λ=,一般级数越多,λ也越大,本例初选1.4。 永磁同步电动机的气隙长度δ一般要比同规格的感应电动机的气隙大,主要 是因为适当的增加气隙长度可以在一定的程度上减小永磁同步电动机过大的杂 散损耗,减低电动机的振动与噪声和便于电动机的装配。所以设计永磁同步电动 机的气隙长度时,可以参照相近的感应电动机的气隙长度并加以适当的修改。本 例取=0.7mm δ。 确定电动机定子外径时,一般是在保证电动机足够散热能力的前提下,视具 体情况为提高电动机效率而加大定子外径还是为降低成本而减小定子外径。 (一) PMSM 的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1) 忽略电机的磁路饱和,认为磁路是线性的; 2) 不考虑涡流和磁滞损耗; 3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波; 4) 驱动开关管和续流二极管为理想元件; 5) 忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (l)电机在两相旋转坐标系中的电压方程如下式所示: d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ?=+-????=++?? 其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。 cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ?? ?-????? ??=--- ? ???? ???? ?+-+? ? (2)d/q 轴磁链方程: d d d f q q q L i L i ψψψ=+???=?? 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项 倍。 永磁同步直线电机矢量控制系统中初始寻相和电角度的测定 摘要:介绍了永磁同步直线电机的结构。根据矢量控制的特点和要求,提出了一种基于增量式位置传感器的初始寻相和电角度测量方法,并经试验加以验证。 关键词:初始寻相;电角度测定;矢量控制;永磁电机;同步电机;直线电机;实验 O 引言 永磁同步交流直线电机由于其行程长、推力大、响应快等优点,在机械装备中越来越受到重视。 永磁交流直线电机系统存在多个电磁变量和机械变量,在这些变量之间存在较强的耦合作用。为了提高控制效果,获得良好的动态调速特性,矢量控制技术成为永磁直线电机系统中重要的控制手段。 对于永磁同步直线电机矢量控制系统,初始寻相和电角度的测量是影响系统性能的关键之一”如果系统上电时无法精确测定电机的初始相位或者在运行时不能精确测定电机的电角度,系统将无法正确完成直线矢量控制的一系列算法,导致直线电机运动混乱,甚至无法起动。本文针对这个问题,提出了一种基于增量式位置传感器的初始寻相和电角度测量方法。 1永磁同步直线电机及其矢量控制系统 根据永磁体的安装位置,永磁同步直线电机分为表面磁极型和内部磁极型。用于伺服目的的一般采用表面磁极的结构;其凸极效应很弱,气隙均匀且有效气隙大。图1为其结构简图。 在定子表面交错排列着不同极性的铷铁硼磁体。 对于永磁同步旋转电机,矢量控制的中的d轴方向沿着转子上永磁体的磁极方向,q轴超前d轴90。 电角度。永磁同步直线电机可以看成是将永磁同步旋转电机沿轴向剖开而形成的。据此可以确定永磁同步直线电机的d轴和q轴的位置,如图1所示,电角度θ就是d轴和q轴间的夹角。 永磁同步直线电机的矢量控制系统的完薹结构则如图2所示。矢量控制一般采用id=O的控制策略,即控制初级电枢电流矢量在d—g坐标系中的d轴分量为零。此外由于电机的d轴和q轴电压分量仍然存在耦合,需要采用前馈补偿的方法进行接耦。由图2可以看出,电角度θ主要用在2s/二R和2R/2s 变换中。由此可见,直线电机在起动对的初始相位以及在运行时的电角度,是实现矢量控制的重要参数。两参数能否精确测定,关系到矢量控制系统能否实现。 2 电机初始寻相的实现 直线电机在起动时,动子的位置具有不确定性。直线伺服系统中一般采用增量式光栅尺作为位置传感器,无法确定动子的绝对位置及电机的初始相位角。对于直线伺服系统一般还需要一个确定的机械零点;对于增量式系统,每次上电后都需要进行回零点操作,之后才能建立起坐标系统。 为了让直线电机有一个确定的机械零点,可以在直线电机端部安装一个接近开关,并保证在接近开关能检测到的范围内光栅尺有一个z轴脉冲。将光栅尺的z轴脉冲和接近开关的输出信号进行逻辑与,用 现代电机设计 利用Ansoft软件对异步起动永磁同步电动 机的分析计算 2013 年7 月 目录 第1章引言………… 第2章 RMxprt在永磁同步电机中的电机性能分析………… 2.1 Stator项设置过程………… 2.2 Rotor项设置过程………… 2.3 Line Start-Permanent Magnet Synchronous Machine的电机仿真………… 2.4 计算和结果的查看………… 第3章静态磁场分析………… 3.1 电机模型和网格剖分图………… 3.2 磁力线分布图…………………… 3.3 磁密曲线 3.3.1 气隙磁密分布………… 3.3.2 定子齿、轭部磁密大小………… 3.3.3 转子齿磁密大小………… 第4章瞬态场分析………… 4.1 额定稳态运行性能………… 4.1.1 电流与转矩大小………… 4.1.2 各部分磁密………… 4.2 额定负载启动………… 4.2.1 转矩-时间曲线………… 4.2.2 电流-时间曲线………… 4.2.3 转速-时间曲线………… 4.2.4 转矩-转速曲线………… 第1章引言 Ansoft Maxwell作为世界著名的商用低频电磁场有限元软件之一,在各个工程电磁场领域都得到了广泛的应用。它基于麦克斯韦微分方程,采用有限元离散形式,将工程中的电磁场计算转变为庞大的矩阵求解。该软件包括二维求解器、三维求解器和RMxprt旋转电动机分析专家系统这3个主要模块,不仅可以进行静磁场、静电场、交直流传导电场、瞬态电场、涡流场、瞬态磁场等不同的基本电磁场的特性分析,还可以通过RMxprt电动机模块仿真多种电动机模型,为实际电动机设计提供帮助。利用Ansoft软件进行仿真可以帮助我们了解电动机的结构特性。 本文是一台4极、36槽绕组永磁同步电动机,利用RMxprt模块进行电机的建模、仿真以及导入到Maxwell2D的有限元模块的方法,然后再对Maxwell2D 中的永磁体模型进行修正,最后对该电机在静态磁场和瞬态磁场的情况下进行分析。 介绍直线电机参数和选型 1.最大电压( max. voltage ph-ph) ———最大供电线电压,主要与电机绝缘能力有关;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 2.最大推力(Peak Force) ———电机的峰值推力,短时,秒级,取决于电机电磁结构的安全极限能力;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 3.最大电流(Peak Current) ———最大工作电流,与最大推力想对应,低于电机的退磁电流; 4.最大连续消耗功率(Max. Continuous Power Loss) ———确定温升条件和散热条件下,电机可连续运行的上限发热损耗,反映电机的热设计水准; 5.最大速度(Maximum speed) ———在确定供电线电压下的最高运行速度,取决于电机的反电势线数,反映电机电磁设计的结果; 6.马达力常数(Motor Force Constant) ———电机的推力电流比,单位N/A或KN/A,反映电机电磁设计的结果,在某种意义上也可以反映电磁设计水平; 7.反向电动势(Back EMF) ———电机反电势(系数),单位Vs/m,反映电机电磁设计的结果,影响电机在确定供电电压下的最高运行速度; 8.马达常数(Motor Constant) ———电机推力与功耗的平方根的比值,单位N/√W,是电机电磁设计和热设计水平的综合体现; 9.磁极节距NN(Magnet Pitch) ————电机次级永磁体的磁极间隔距离,基本不反映电机设计水平,驱动器需据此由反馈系统分辨率解算矢量控制所需的电机电角度; 10.绕组电阻/每相(Resistance per phase)———电机的相电阻,下给出的往往是线电阻,即Ph-Ph,与电机发热关系较大,在意义下可以反映电磁设计水平; 11.绕组电感/每相(Induction per phase) ———电机的相电感,下给出的往往是线电感,即Ph-Ph,与电机反电势有关系,在意义下可以反映电磁设计水平; 12.电气时间常数(Electrical time constant) ———电机电感与电阻的比值,L/R; 13.热阻抗(Thermal Resistance) ———与电机的散热能力有关,反映电机的散热设计水平; 14.马达引力(Motor Attraction Force) ———平板式有铁心结构直线电机,尤其是永磁式电机,次极永磁体对初级铁心的法向吸引力,高于电机额定推力一个数量级,直接决定采用直线电机的直线运动轴的支撑导轨的承载能力和选型。《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 直线电机的选型首选推力速度,然后看连续消耗功率、热阻和散热方式和条件等,再次看供电电压和电流,对快速性有要求还要看电气时间常数。个人意见,最最反映直线电机性能水平的是推力平稳性、电机常数和热阻,不过推力平稳性指标多数厂家未必会直接给出。《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 电机的推力系数以出力电流比来标示,比如N/A,Nm/A《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 反电势系数用电压速度比来标示,比如V/(m/s),V/(rpm)等《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 以电机的机电转换公式可以推导出其间的关系,具体过程如下:《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 直线电机的机械输出功率为Pm=F*v =Cm*I*v,其中Cm为推力系数,I为电流,v为电机运行速度《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》电机电气消耗功率中的电磁转化功率为:Pe=ε*I=Ce*v*I,其中Ce为反电势系数,v为电机运行速度, I为电流《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 文献翻译 题目利用电磁特性分析对永磁同步电机 进行故障诊断的新方法 学生姓名黄建波 专业班级电气工程及其自动化10级1班学号541001020215 院(系)电气信息工程学院 指导教师张志艳 完成时间 2014年 05月23日 利用电磁特性分析对永磁同步电机进行故障诊断的新方法姚达,IEEE学生会员,石晓东,IEEE会员,马赫施·奎纳姆瑟,IEEE会员 摘要 本文提出了一种通过直接测量传感线圈的磁通量对永磁同步电机进行健康监测和多故障检测的新方法。不同于其他基于频谱的故障检测方案,这种方法仅需要测量用于故障检测的基频分量。因此,本方案的性能不受速度波动或者电源谐波的影响。此外,可以检测到匝间短路的位置和静态偏心的方向,这是其他方案都没有的。虽然是嵌入式技术,但它非常适合于关键任务和新兴技术的应用,离岸风力涡轮机和混合动力汽车技术,军事上的应用等故障的早期检测非常重要的场合。使用有限元分析进行二维模拟已经验证了不同条件下提出的方法。实验简介对定子匝间短路故障、失磁故障、静态偏心故障进行了讨论,对提出的方案进行实验,验证其有效性。 关键词:故障检测,有限元分析、永磁同步电机、传感线圈。 1.简介 过去十年,永磁同步电机(PMSM)由于其高效率、高输出功率体积比和高转矩电流比,在诸如风力涡轮机和电动汽车中得到了很大的普及。在这些关键任务的应用中,一个意想不到的机器故障可能会导致非常高的维修或更换费用,甚至灾难性的系统故障。因此,这种场合需要坚固可靠的健康监测和故障检测方法,可以为预防性维护提供依据,延长使用寿命,减少机器故障。 离线机故障检测与诊断的方法不能频繁地测试,经济上也不允许,研究人员已经提出了许多在线检测的方法,这类方法维修费用少、诊断结果更可靠。一个具有成本效益的方式是基于定子电流频谱,通常被称为电动机电流特征分析(MCSA)[1]-[6]。电机电流的特定次谐波可以作为某种特定故障的标志。由于离散傅里叶变换(DFT)不包含机器操作和快速变化的速度的时间信息,短时傅里叶变换可以权衡时间和频率的分辨率。然而,一个固定长度的窗口可能导致不同的电流频率[7]不一致,改变电机的速度使它难以确定谐波次数。为了避免时间分辨率和频率分辨率之间的矛盾,罗赛罗等人[7]利用连续小波变换(CWT)和离散小波变换(DWT)在一台机器非平 永磁同步电动机节能认证 产品描述 申请编号: 申请人: 制造商: 生产厂: 产品名称: 申请单位(印章) 本企业在此郑重声明:本次申请中,我单位向指定检测机构提供的型号/规 格为 的 (产品名称)是由 (生产厂名称)于 (生产厂地址)完成最终装配和出厂检验。 本企业对提供的以上情况的真实性负责,否则由此引起任何后果由本企 业承担全部责任。 申证企业负责人(签名): 日期: (企业盖章) 企业名称: 申证产品名称、型号: (或见型号规格型谱表) 本企业在此郑重声明:上述申证产品所使用的名称、型号和商标保证严格遵守国家有关法律法规和政府部门的有关规定。如有乱用、冒用其他企业产品的名称、型号和商标导致侵权行为,本企业将对其后果承担全部法律责任。 本企业对提供的所有与认证有关的资料的真实性、有效性和正确性负责。如果本企业获证的产品有变更,将及时提出产品变更申请,否则由此引起任何后果由本企业承担全部责任。 . 申证企业负责人(签名): 日期 (企业盖章) 永磁同步电动机节能认证产品描述 1.1电动机类型: 异步起动三相永磁同步电动机电梯用永磁同步电动机变频驱动永磁同步电动机其他 产品名称: 商标: 1.2申请人名称和地址(注册地址): 1.3制造商名称和地址(注册地址): 1.4生产厂名称和地址(实际地址): 2. 关键零部件/原材料清单 名称制造商牌号磁感(T)/铁损(W/kg) 硅钢 片 名称制造商型号/规格电阻率(Ω?m) 漆包 线 名称制造商牌号最大磁能绩(kJ/m3) 磁性 材料 注:如果上述材料属多个制造商,均应按上述要求逐一填写 送检样品原材料单台用量: 样机型号硅钢片用量(kg)漆包线用量(kg)磁性材料用量(kg)样品1 样品2 样品3 样品4 …… 3676IEEE TRANSACTIONS ON MAGNETICS,VOL.46,NO.9,SEPTEMBER 2010 Stator Slotting Effect on the Magnetic Field Distribution of Salient Pole Synchronous Permanent-Magnet Machines Gurakuq Dajaku 1and Dieter Gerling 2 FEAAM GmbH,D-85577Neubiberg,Germany Institute for Electrical Drives,University of Federal Defense Munich,D-85577Neubiberg,Germany This paper deals with a new analytical method for determining the air-gap ?ux density of salient pole synchronous permanent-magnet (PM)machines including the stator slotting effect.The approach to analyze the air-gap ?ux density based on the new model is to deter-mine the air-gap magnetomotive force (MMF)and the ?ux-path permeance function.We determine the ?ux-path permeance function,which includes the stator slotting effect,by using a simple magnetic reluctance network that takes into account the geometry of the machine and the material https://www.360docs.net/doc/7b16354542.html,ing the new model with stator slotting,we calculate the air-gap ?ux density distribution of different electric machines using ?nite-element methods to prove the accuracy of the new model. Index Terms—Air-gap ?ux density,analytical solution,?nite-element method (FEM),?ux-path permeance,permanent-magnet (PM)machine,stator slotting effect. I.I NTRODUCTION P ERMANENT-MAGNET synchronous machines (PMSMs)gain more and more importance for spe-cial drive applications.Up to recent years,PMSMs were known for small drives,e.g.,for servo applications.In the last years,PMSMs have been increasingly applied in several areas such as traction,automobiles,etc.This type of electrical machines offer many advantages,including a high power-to-weight ratio,constant power over a wide speed range,and high ef?ciency.Magnetic ?eld analysis in PM machines is an important pre-requisite for the prediction of machine parameters,electromag-netic torque,radial forces,and so on.In particular,accurate knowledge of the ?ux density distribution in the air-gap is es-sential for the accurate prediction of the motor performances.Magnet con?guration,magnetization direction,air-gap length,and the number of the pole and slot combination have signi?cant effects on the ?ux density distribution in the air-gap.Further,the presence of stator or rotor slots have a large in?uence on the air-gap magnetic ?eld distribution and therefore on the electro-magnetic torque.The consequences can be cogging torque and torque ripples causing vibration,noise,and speed ?uctuation.Therefore,the detailed knowledge of the ?eld distributions in the air-gap is of main importance for predicting and optimizing the performance of PM machines. Of course as well known,slotting in?uences the magnetic ?eld in two ways.First,it reduces the total ?ux per pole,an effect which is usually accounted by introducing the Carter co- ef?cient into the calculation.Second,it affects the distribu-tion of the ?ux density in the air-gap of the electric machines.Therefore,the slotting effect is important to be taken into ac-count during determination of the air-gap ?ux density. Manuscript received February 26,2010;revised April 09,2010;accepted April 15,2010.Date of publication May 03,2010;date of current version Au-gust 20,2010.Corresponding author:G.Dajaku (e-mail:Gurakuq.Dajaku@unibw.de). Color versions of one or more of the ?gures in this paper are available online at https://www.360docs.net/doc/7b16354542.html,. Digital Object Identi?er 10.1109/TMAG.2010.2049269 The air-gap magnetic ?eld with slotting effects can be eval-uated by a variety of techniques including analytical or semi-analytical methods as well as numerical techniques like ?nite elements or boundary integral methods.Finite elements give accurate results considering geometric details and nonlinearity of magnetic materials.However,this method is computer time consuming and poorly ?exible for the ?rst step of design stage of electrical machines.Analytical methods are useful tools for ?rst evaluation of electrical motors performances and for de-sign optimization since continuous derivatives issued from the analytical solution are of great importance in most optimization methods.A signi?cant number of publications on the analytical solution of the air-gap magnetic ?eld in slotted machines can be found in the literature,e.g.,[1]–[17]. Two analytical methods are mainly developed for modeling the stator slotting effect.The ?rst one concerns the use of con-formal mapping to consider slotting effects [1]–[7],and the ac-tual air-gap ?ux density is calculated by multiplying the rela-tive permeance function with the radial ?ux density of a slotless motor.This method has an important drawback since it is as-sumed that the slot width is much smaller than its height.Fur-thermore,even though this method gives information about the air-gap ?ux density ?uctuation due to stator slotting,it doesn’t take correctly into consideration the slotting effect.The reason is that the magnetic ?eld and the slotting effect are determined separately and for different conditions.The second method con-sists of analytical solution of Laplace or Poisson equations in the different sub-domains (magnet,air-gap and slots)by ap-plying the boundary conditions on the interface between sub-do-mains [8]–[13].However,these models are not able to pro-vide an accurate evaluation of air-gap ?ux density if the both stator and rotor slotting have to be considered.Also as will be shown later,the rotor saliency effect on the stator slotting isn’t considered in these works.On the other hand,different from [1]–[13],in [14]–[17]another modeling way for the stator slot-ting is used;the slotting effect is taken into consideration during derivation of the total permeance function for the magnetic ?ux path.However,even this modeling procedure describes accu-rately the air-gap permeance taking into account the stator and 0018-9464/$26.00?2010IEEEKW调速永磁同步电动机电磁设计程序文件
调速永磁同步电动机的电磁设计与磁场分析
永磁直线电机精确相变量建模方法(精)
一种微小型永磁直流直线电机
机械毕业设计954交流永磁直线电机及其伺服控制系统的设计
交流永磁同步直线电机介绍及其控制系统设计
稀土永磁材料及其在直线电机中的应用展望
调速永磁同步电动机的电磁设计与磁场分析
永磁同步电机基础知识
永磁同步直线电机矢量控制系统中初始寻相和电角度的测定
Ansoft永磁同步电机 设计 报告
直线电机参数
利用电磁特性分析对永磁同步电机进行故障诊断的新方法..
永磁同步电机产品描述
永磁同步电机故障诊断分析英文材料