11全球定位系统

第一章前言
1.1全球定位系统
1.1.1 系统概述
The Global Positioning System(GPS) is a satellite-based radio system funded and operated
by the United States Department of Defense.全球定位系统(GPS)是一种基于卫星射频导航的系统,由美国国防部研制。它几乎提供了地球上任何地方、任何时间和任何天气状况下的即时位置、速度和时间(PVT)信息。这一系统起初是为美国军队设计的,而今天却覆盖了全球两千万用户[15]。
GPS offers two kinds of service:the Precise Positioning Service(PPS)and the Standard
Positioning Service(SPS).全球定位系统有两大功能:准确定位功能(PPS)和标准定位功能(SPS)[42]。准确定位功能包含一种“防篡改”特性,用户只有经美国国防部授权获得密钥才能进入。然而,准确定位功能却面向所有民用用户开放。优先利用性于2000年5月2日解除,它是用于降低标准定位信号的。没有了优先利用性,独立用户一般估测位置可以精确到10米、100纳秒[15]。
GPS is comprised of three main components:全球定位系统由三个部分组成:
1.空间部分:全球定位系统的基准星由位于20200千米高空,运行时长近12小时,沿
接近环形的地球轨道运行的24颗卫星组成。每颗卫星沿着同一轨迹,每两条轨道都要经过同一地面固定点。这些空间飞行器(SV)安置在六个轨道平面上,每条轨道有四个主卫星槽。将对开普勒运动是对全球定位系统卫星的运行的完整描述,见附件A。每颗卫星都发射加了时间标记的测距信号和导航数据。
2.控制部分:全球定位系统由GPS联合规划办公室运行控制部监控和操纵。共有5个
监控站分布在世界各地,不间断地追踪监控卫星,通过地面和卫星链接将原始数据和导航信号传到主控制站(MCS)。卫星通过S波段射频从一条专用的地面天线每天至少上传一次星历表和时钟参数,位于科罗拉多斯普林斯的主控制站对历表和参数进行计算。
3.用户部分:全球定位系统接收机对卫星信号进行追踪和解码。它根据星历表估计卫星的位置并根据射频信号的行驶时间测量卫星的距离,然后根据一个简单的数学原理(三维空间的三边测量)推断自身的位置。准确计时是测量卫星距离的关键,卫星上的电子钟几乎是精确而且完全同步的。为了使用价格低廉的石英振子,接收器会额外用一种卫星距离测量仪。有了距离测量仪,接收器不仅可以测算其自身位置,还能消除时钟偏倚。
1.1.2 信号
Each GPS satellite transmits signals on two L-band frequencies:?L1 at 1575.42MHz and ?L
at 1227.60 MHz. 每颗全球定位卫星在两个L波段频率发送信号:?L1为1575.42MHz,?L2 2
。民用和军用卫星都增加了其他频率的为1227.60 MHz [42]。图1-1的第一个波形为载波?
L1
波段[15,22]。第三波段L5的频率为1176.45 MHz。
Each satellite transmits two different ranging codes: 每颗卫星都发送两种不同的测距码:一个是调制载波L1相位的粗略/接收(C/A)的伪随机噪声(PRN)码,一个是调制载波L1和L2相位的精确(加密)[P(Y)]码[42]。C/A码在一毫秒内每1023比特(或码片)重复一次,或者相当于码片率为1.023Mcps。图1-1的第二个波形为C/A码的一部分。P(Y)码是很长的一个序列(大约1014码片)。每颗全球定位卫星都有唯一的PRN码;因此可以通过PRN 码识别任何一个全球定位卫星。这些扩展频谱码的自相关和交叉相关特性使GPS能够测距。尤其是每个码的自相关性能只有一个主峰,这有助于GPS接收机获取定位信号。主峰的斜度直接决定了测距的精度。不同PRN码之间缺乏相关性使得在同一频率的卫星可以同时发
送信号而不互相干扰。
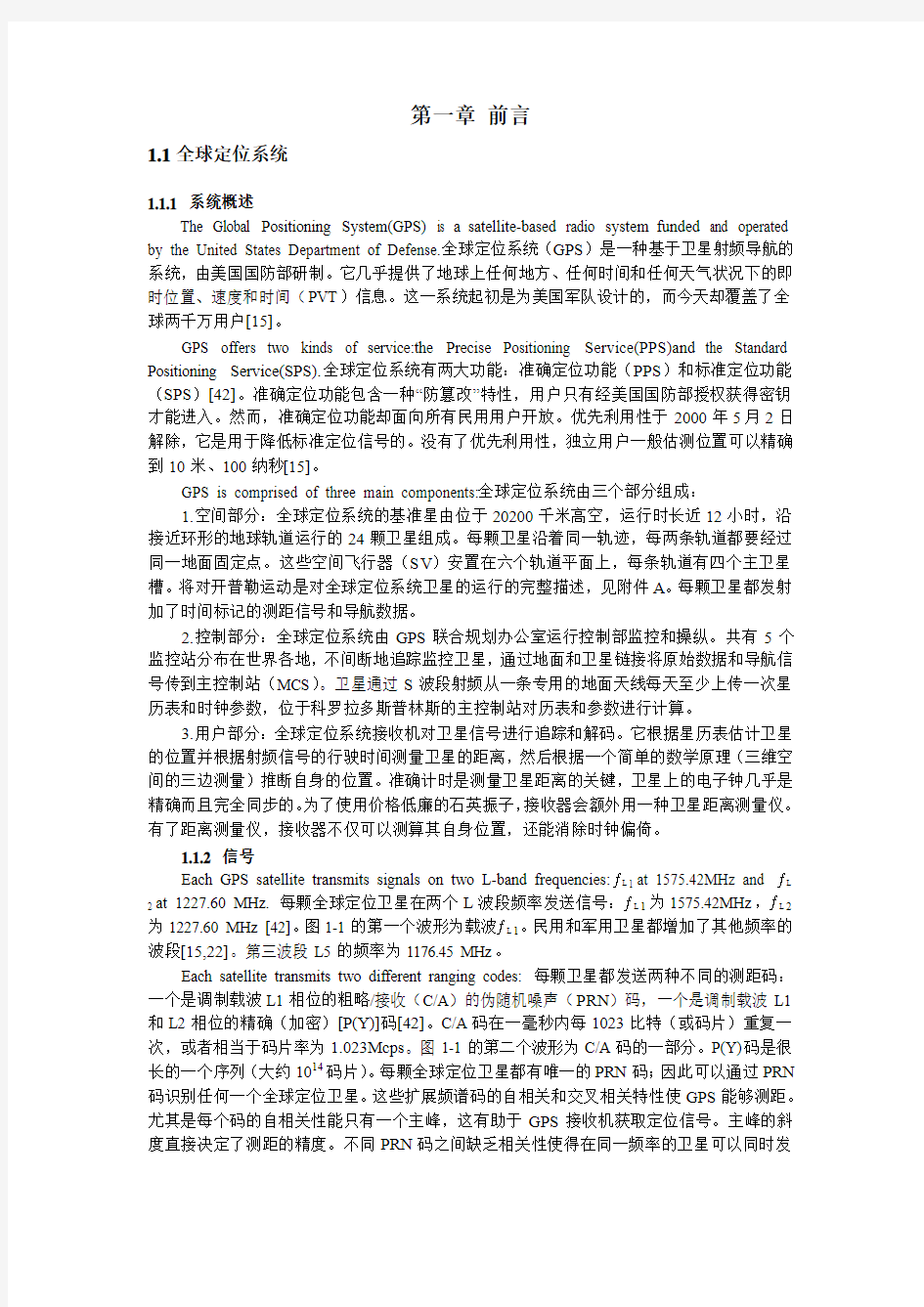
Both GPS frequencies are also modulated by binary navigation messages transmitted at a rate of 50 bits per second(bps).两种GPS频率要也经过50bps的二进制导航信息调制[42]。图1-1的第三个波形显示出几个导航数据。一个信号由五个300比特的子帧组成,包含了卫星的健康状况、星历表、时钟偏倚参数和天文历书。历表数据描述了航天器目前的轨迹。年历描述的是所有航天器历表数据中精确度衰减的译本。附件A详细描述了导航信息的内容。
图1-1 全球定位系统信号结构图
The structure of these three signal components, i.e., carriers, ranging codes, and navigation data, is diagrammed in Figure1-1. 图1-1所示为载波、测距码和导航数据这三种信号成分[42]。用模2加法将一个码和一条信息组合,再合成二进制信号,用二进制相移键控(BPSK)调制载波。由于单位“米”与“秒”的差别仅仅是相当于真空中光速(约3×108m/s)的一个换算系数,为了方便,通常把“米”与“秒”互换。
1.1.3 测量方法和位置的估算
GPS receivers track satellites, decode navigation messages, and produce code and carrier phase measurements for PVT determination. GPS接收机追踪卫星,解码导航信息,并为测定即时位置、速度和时间而产生代码、测量载波相。
The GPS signal acquisition process consists of a search for both PRN code shift and local carrier frequency offset. 全球定位系统信号的获取包括搜索PRN码转换和本地载波频率偏移。当接收机“嗅”到一个信号,他会用延迟锁定回路(DLL)继续追踪信号,用相位锁定回路(PLL)追踪相位[5,42]。
图1-2 延迟锁定回路
Figure 1-2 shows the DLL structure. 图1-2所示为延迟锁定回路结构[42]。它与所接收到的稍具早期和后期复制的信号相关。如果接收的信号被锁定,早期相关因子就会在自相关波峰上升段显现,而后期相关因子就会在波峰下降段显现。鉴频器的功能是区分早期和后期相关性(图1-2中的Z E和Z L)。延迟锁定回路通过将鉴频器信息反馈给本地代码生成器来锁定代码,这样鉴频器信息才能归零[5]。信息接收时间差由接收机的时钟确定,而“标记”在信号上的发送时间是信号从卫星到接收机的通行时间。测定的这一时间为伪距(ρ),它被光速放大了。由于接收机时钟与卫星时钟不同步,因此从卫星到接收器的时间差不是真实值。
Having removed the PRN code from the signal, the GPS receiver continues phase tracking with a phase lock loop. GPS接收机从信号中消除PRN码后,继续用相位锁定回路追踪相位。它在本地生成一个载波频率,并试着将频率与输入信号的相位精确匹配。一旦锁定载波相位,导航数据就会迅速被提取。载波相位的测量值(ф)是接收机产生的载波与卫星发送的载波的相位差。接收机能计算出部分循环,但不能计算卫星与接收机全循环的数量。卫星与接收机之间的距离等于与未知的全循环数量和测得的分段循环数之和。这一未知的全循环数称为“完整模糊度”。ф的误差是多普勒值,可用于确定接收机的速率。
代码与载波相位测量值可建模如下[42]:
ρ=r+c(b u-B S)+I+T+M+ερ(1-1)
ф= r+c(b u-B S)-I+T+Nλ+εф(1-2)
·ρ为测定的代码相位值或伪距。
·ф为测定的载波相位值。
·b u为接收机(或用户)时钟偏倚。b u和用户位置都必须计算出来。
·B S为卫星时钟偏倚。B S和b u代表卫星时钟和接收机时钟相对GPS时间推进的时间值。卫星时钟偏倚模型为时间的二次函数,这一模型的参数由主控制站估测并上传到卫星。他们作为导航信息的一部分被发送[42]。
·I为电离层延迟。
·T为对流层延迟。
·M为多途径传播误差。我们将在1.1.4详细讨论I、T和M。
·N为整数模糊度。用户通常不了解,但必要时它可以用几种技术计算[10,29]。用载波相位进行精确关联定位实际上就是解决整数模糊度[42]。
·λ为载波波长。对L1来说,其波长λL1=c/?L1≈19cm。
·ερ代表其他代码相位测量值误差。
·εф代表其他载波相位测量值误差。
If ρc is the pseudorange obtained after accounting for the satellite clock offset and the other measurement erros, 若ρc 为计算卫星时钟偏倚和其他测量值误差后得到的伪距,则等式(1-1)可以修正为伪距值,ρc :
ρc ≈u b c r ?+=u n n n b c z z y y x x ?+-+-+-2)(2)(2)()()()( (1-3)
其中第n 颗卫星的位置(x (n),y (n),z (n))是根据星历表计算的,用户的位置(x,y,z )是未知的。加上接收机时钟偏倚b u ,等式(1-3)中共有4个未知数。假如在一个测量期间能够至少获得四个卫星发送的信号,那么这4个未知数就可以算出。
We can sove these equations byfirst linearizing them at initial estimates, 我们在初步估计中可以通过线性化计算这些等式,然后用最小二乘法(如果有四个以上值,等式就会估计过度)得出相关性,最后用这些相关性估计结果[42]。这一过程可以重复进行,通常重复2-4次,估计的位置值会很快近似。
1.1.4 误差来源
Code and carrier phase measurements contain a variety of biases and errors, as indicated in Equations(1-1) and (1-2). 代码和载波相位测量值中存在各种偏倚和误差,如等式1-1和1-2中所示。这些误差削减了定位的精确度。图1-3所示为GPS 主要的测量误差。基本上可以分为三类:卫星相关的误差、接收器相关的误差和传播媒介相关的误差[42]。
图1-3 GPS 测量误差来源
·卫星相关误差:
1. 卫星历表:卫星的真实位置和速度与控制部分估算的值不同。卫星历表数据误差产生约为1-2米的均
方根测量误差。
2. 卫星时钟:GPS 控制部分不能够纠正卫星时钟偏倚,其约为1-2米的均方根测量误差。
·传播媒介相关误差:
3. 对流层延迟:对流层为距海平面8-13km 的大气层。对流程的干燥空气和水蒸气能够折射GPS 信号。
用大气模型可以估计流程延迟[42]。若不纠正误差,那么结果对于正上方的卫星到海平面的距离就会偏差2m 。
4. 电离层延迟:电离层为距地表约50-1000km 含有电离气体的大气层。电离层通过在载波相位测量过
程中延迟代码相位的测量而影响GPS 信号传播。从而在电离层误差成分I (等式1-1和1-2)中出现负号。除了这一代码-载波偏离性,电离层也具有分散性,例如:电离层延迟的量与信号频率成反比。根据卫星高度的不同,电离层延迟所产生的测量误差约为2-10m 。GPS 导航数据中包含电离层模型,大约可以消除一半延迟[18]。
·接收机相关误差:
5. 多途径:地面GPS 天线的反射信号会干扰卫星的直射信号。由于现实中反射面的存在,因此难以避
免多途径误差,使用限制多途径误差的天线并将它放置在远离强反射环境能够减少多途径误差[48]。
多途径误差同时影响着代码和载波的相位值。在伪距测量中会产生1-5m误差。另一方面,仅有约1-5cm 的载波相位测量误差是多途径误差。由于这个值很小没有单独列在等式(1-2)中,εф就包含多途径误差。
6. 接收机噪声:热噪声、多路存取干扰和信号量化噪声产生接收机误差[42]。用现代微处理器和芯片
技术,GPS接收机产生的代码测量误差低于0.5m,而接收机噪音产生的载体相位测量误差仅为1-2mm。
1.2 差分全球定位系统
As noted before, the position accuracy of stand-alone SPS users is about 10m horizongtallyand 15m vertically. 如我们之前所关注的,独立准确定位功能用户的定位精度为水平向10m,垂直向15m。使用差分GPS(DGPS)可以达到更高的精度。
图1-4 差分GPS构造图
DGPS takes advantage of the fact that differential users in the same region have common measurement errors in general. DGPS充分利用同一地区用户的测量误差相同这一现实。如图1-4所示,用已知位置坐标的参考站计算测量的伪距与预期伪距的差,并通过通信链路发送差分的正确值给该区域用户。应用DGPS用户可以排除大多数伪距误差以获得更高的精度。表1-1总结了GPS中的误差和DGPS中的误差偏移[42]。在不同的模式中,假设用户与参考接收机的距离为几十千米,信号等待时间为几十秒。
表1-1 GPS和DGPS的测量误差总览
Since the reference and user receivers are tracking signals from the same GPS satellite at the same time, 由于参考站接收机和用户接收机同时追踪同一全球定位卫星信号,卫星时钟误差在差分模式中几乎完全被消除,因而卫星历表误差也几乎能够消除。但要注意的是的差分历表残差会使拉大卫星到用户和卫星到参考站的视线间距。当用户距参考站100米时,距离残差小于0.05cm[42]。
DGPS can also reduce the range error due to ionospheic and tropospheric effects. DGPS也能减少电离层和对流层产生的误差。显然,相应的残差取决于电离层和对流层的相关性。当参
考接收机与用户接收机相隔甚远时,电离层和对流层在这两条途径上的传播延迟则相差很大。
DGPS effectively mitigates satellite clock error,satellite ephemeris erroe, ionospheric delay,and tropospheric delay in its service coverage. DGPS在其覆盖范围内有效地削弱了卫星的时钟误差、历表误差、电离层延迟和对流层延迟。然而,参考站接收机和用户接收机的多途径误差和接收机噪音是无法校正的,因此DGPS也不能校正。相反地,DGPS用户的多途径误差和接收机噪音误差却增加了,是因为分别来自参考站和用户的两种误差在一起产生了叠加。
1.3 局域扩增系统
The U.S. Federal A viantion Administration(FAA) is developing the Local Area Augmentation System(LAAS) to supprot air craft precision approaches. 美国联邦航空管理局(FAA)正在开发局域扩增系统(LAAS)以支持飞机精密进场。这一局域地面DGPS负责生成经差分校正的载波平滑码和接近目标航迹信息并发送给飞机用户[81]。同时它也负责探测局域扩增系统地面设施的空间和地面两部分的故障并发出警报。地面设施必须确保所有局域扩增系统校正后传播的测距数据都能安全使用。若发生故障威胁到用户的安全,地面设施一定会探测到并在报警时间内向用户发出警报。
Figure1-5 describes how LAAS operates. 图1-5为局域扩增系统运行图。地面设施装有四个参考接收机(RR)、接收机天线、连接独立天线的冗余超高频数据传输器和局域扩增系统在机场设的仪器架[79]。地面设施对全球定位卫星信号进行跟踪、解码和监控,并进行差分校正。它也对产生的校正值进行完整性检验。之后,校正信息与适合的完整性参数和接近目标轨迹信息又地面发送器经冗余超高频数据传输器传给飞机用户。传送类GPS信号的尖晶石形滑石可有效应用在机场地面以改善卫星的几何位置。
图1-5 局域扩增系统组成图(美国联邦航空管理局提供)
表1-2 局域扩增系统精密进场条件
The performance of all navigation systems, including LAAS,can be evaluated with respect to accuracy, integrity, continuity, and availability. 所有导航系统的运转,包括局域扩增系统,都可以用精确度、完整性、持续性和有效性来评估[16,99]。
1. 精确度:衡量导航结果与真值的偏差。
2. 完整性:系统不能导航时及时报警的能力。
3. 持续性:导航系统在预定的持续运行时间内支持精确度和完整性需求的可能性。
4. 有效性:系统在开始进场之前支持精确度、完整性和持续性需求的时间百分率。
The currently suggested requirements for LAAS precision approaches are summarized in Table 1-2. 表1-2中总结了当前对局域扩增系统精密进场的要求[16,19,81]。P HMI是出现危险错误信号(HMI)的可能性。例如,如果危险错误信号导致出现用户垂直导航错误而超过垂直警报限10米,地面设施必会检测故障并在一类局域扩增系统精密进场的3秒警报时间(TTA)内警告用户。值得注意的是,二类和三类局域扩增系统对完整性和持续性的要求比一类更加严格。
The FAA commenced the LAAS CA T I development phase in April 2003 and expects to have this system operational in 2006. 美国联邦航空管理局于2003年4月开始开发一类局域扩增系统,并预期于2006年运行。基于在研发二类和三类局域扩增系统所做出的努力,联邦航空管理局将在2005年初判断签订全面开发和生产协议的可行性[78]。
1.4 完整性监控试验台
1.4.1 功能
The Stanford University Integrity Monitor Testbed(IMT) is a prototype of the LAAS Ground Facility(LGF) that is used to evaluate whether the LGF can meet the integrity requairements that apply to CA T I aircraft precision approach. 斯坦福大学的完整性监控试验台(IMT)是局域扩增系统地面设施的原型,用于评价地面设施是否能够满足应用于一类飞机精密进场的完整性要求[33,48,49,64,67,89]。完整性监控试验台使用一套广泛应用的监控算法以检测GPS空间、地面部分和地面设施本身可能出现的一系列故障。一些故障会触发不止一个监控算法,因此地面设施具有一种复杂的故障处理强制力,称为执行监控(EXM),它能够协调不同的完整性监控器并隔离故障。监控算法和执行监控将在第二章进行论述。
1.4.2 硬件配置
The LGF requaires redundant DGPS reference redeivers to be able to detect and exclude failures of individual receivers. 局域扩增系统地面设施需要差分全球定位系统参考接收机以便检测和排除个别接收机故障。图1-6所示为位于斯坦福HEPL实验室屋顶的三个完整性监控试验台天线。它们尽管受的屋顶空间限制,却彼此充分分隔以最大程度减小个体接收机的多途误差[30]。如今的完整性监控试验台天线使用了三个NovAtel OEM 4接收机,分别连接三个独立的GPS针轮天线。每个接收机能同时追踪多达12个卫星。一个信道就是指一个参考接收机追踪到的一个卫星。如图1-6描绘了一个信道(参考接收机2, 伪随机噪声7),或者简称信道(2, 7)。
图1-6 完整性监控试验台天线构造图
Each receiver samples GPS signals and provides receiver measurement packets T s every seconds, 每个接收机采集定位信号,每T s秒发出接收机测量值包,其中在现在的完整性监控试验中
T s=0.5 (1-4)
也就是说,采样率等于每秒两次。这些定位测量值进入完整性监控试验台处理器进一步计算。
The Stanford IMT is configured by software in such a way that it can be used either in real-time or in post-processing. 斯坦福完整性监控试验台配置了如此高端软件,从而能够用于实时检测或后处理。图1-7展示了它的机制。当1点关闭,GPS接收机测量值包直接进入完整性监控试验台处理器单元。这一过程适用于实时完整性监控试验台运行时。若2点关闭,测量值包就会存储到固定的存储器中。存储的数据包用于标定还是故障检测取决于关闭的是A点还是B点。这称为后处理完整性监控试验台的运行。一套固定数据包可以重复存储到存储器,这使得调试和检测更容易进行。
图1-7实时和后处理完整性监控试验台
1.4.3 确证试验
LGF verification testing can be divided into two components: nominal testing and testing with simulated failures. 地面设施确证试验分为两部分:标定试验和模拟故障试验。标定实验是为了检验完整性监控试验台是否产生错误警报而危及系统持续性。标定试验结果将在第二章进行大篇幅讲解。由于监控算法的复杂性,就更有必要用实例说明完整性监控试验台能够满足各种可能的故障状态下的特殊要求。若要对比新近设计的和现有的完整性监控器的故障
检测表现,详见第四、五章。其他故障检测例子见[28,33,34,89]。
图1-8故障与故障结果
To test the IMT response to failures, simulated errors are injected into the system. 为检测完整性监控试验台对故障的应答,向系统引进模拟故障。图1-8上端曲线为t1时间点发生的接线端故障。没有完整性监控,局域扩增系统用户的(VPE)就会在t1开始升高,最后在t3超过额定的垂直警报限(V AL),如中间曲线所示。若在既定的警报时间内故障未被检测到,用户没有得到警告,此接线故障就会引发。图1-8下端曲线显示了一个完整性监控检测的统计量。该统计量大小在t2超过了阈值,故障被检测到。继而用户将在垂直位置误差达到垂直警报限前被警告勿使用错误的测量值。此图举例说明了完整性监控功能用于防止用户接收危险错误信息。本文所讨论的是监控器的设计以检测各种故障。
图1-9 两种故障检测方法
Two methods are used to inject failures into the IMT, as illustrated in Figure 1-9. 将故障引入完整性监控试验台有两种方法,如图1-9。一种是编制一个WelNavigate 40信道的定位信号模拟程序来生成错误的射频信号注入完整性监控试验台。尽管如此,如图1-7中提到的,后处理完整性监控试验台还提供了另一种引入故障的方法。有一种程序可以更改标定状态下收集并存储的接收机测量值,从而引入故障,然后让完整性监控试验台后处理这些数据包。
同时,也可以在完整性监控试验台处理过程中通过适当改变源代码直接引入故障。
In this thesis, 在这一理论中,后处理完整性监控试验台用于对2003年3月10日24小时收集的标定定位数据集进行检测。
1.5 前期工作
The U.S. FAA has been developing the LAAS as the primary navigation system to support Category I, II, III aircraft precision approaches. 美国联邦航空管理局已在开发局域扩增系统,作为一代导航系统它将支持一类、二类和三类飞机精密进场。对局域扩增系统已有很多研究。恩格博士阐述了局域扩增系统的基础运行并将精密度、完整性和持续性联系起来[16]。
In order to meet the stringent integrity rquirement shown in Table1-2, 为了满足表1-2所示的严格的完整性要求,局域扩增系统需要执行全套的完整性监控算法以广泛检测可能的故障。多数监控算法已编制出。例如,代码/载波完整性监控技术的开发见[75]。信号质量监控的调查是为了瞄准由全球定位卫星发送的变形C/A码[1,61,82]。人们还研究了几种为每个定位卫星确证历表和时钟数据的方法[36,51]。除了距离领域的完整性监控器,位置领域的完整性监控器也有研究[27]。Pullen博士、Pervan和他们的团队建立了初始局域扩增系统地面设施原型,被称为完整性监测试验台(IMT),并用于评价地面设备能否满足一类完整性要求。本研究就是以该试验台为依托。
The ionosphere provides the most worrisome challenge to LAAS and the LAAS integrity algorithms. 电离层对局域扩增系统和局域扩增系统完整性算法来说是最大的令人烦恼的挑战。Christie在局域研究电离层对扩增系统结构的去相关效应中达到了统计学极限[9]。Datta-Barua报道了2000年4月6日从广域扩增系统(W AAS)超真数据中观测到的电离层异态[12]。之后Dehel根据从国际全球定位系统服务处(IGS)的独立数据确证了这一电离层异态。Luo 论述了电离层危害模型并估计了电离层对局域扩增系统的影响[32]。她的模型显示电离层斜度可能会导致垂直定位误差。关注这一论题主要是为了探索快速的电离层斜度检测方法。
The divergence Cumulative Sum method is developed to quickly detect marginal ionospheic graients in this thesis. 偏移累计总数(CUSUM)法的研究就是为了快速检测该理论中的电离层边缘斜度。累计总数法创造于1954年[50]。已经广泛应用于连续的质量控制检测。Pullen 用累计总数确证全球定位系统扩增系统的保护水平[66]。累计总数法也被Lee成功运用在地面设备的σ均值误差监控[28]。
1.6 贡献
Three major contributions are described in detail in the text of this thesis. 本文关于这一论题的详细论述做出了三大贡献。以下是对这三大贡献的简要概括。图1-10所示为它们的关系。第一大贡献是全面分析了现有的局域扩增系统监控程序组,暴露了他们的局限性。因此要将累计总数法加入监控程序组以加强对电离层斜度的检测,这是第二项贡献。根据全面分析结果,将特定的监控器检测统计量结合组成故障专用检测是第三项贡献,进而可以提高系统完整性。
1.6.1 第一次对监控器程序组的全面分析
In this thesis, a generic failure model, in which a step failure is injected into both the code and carrier measurements of a GPS receiver channel, is created. 本文创建了一个类故障模型,该模型将一个通用故障引入了一个接收机信道(一个信道指被接收机追踪到的一颗卫星)的代
码和载波测量值。所有完整性监控器的向地面设施提交的故障应答均源于对这一通用测量值故障模型的分析。对模型的分析包括信道码阶段故障、信道相阶段故障、卫星时钟阶段故障、卫星时钟接线故障、接收机时钟阶段故障和电离层斜度。本研究鉴别了每个完整性监控器能检测的相应故障类型,并清晰得地呈现出一系列潜在威胁对应的的各个监控器功能的全图。这些结果对于如何建立有效的特异故障检测(FST)统计量提供了宝贵的信息。更重要的是,故障分析也是一种定量评价和比较完整性监控器的表现的工具。
图1-10三大贡献的关系
1.6.2 累计总数法检测电离层斜度
The generic Cumulative Sum quality-assurance method is applied in this thesis to the detection of unusual ionosphere divergence and the divergence CUSUM method is developed that is able to quickly detect marginal ionospheric gradiants. 将通用的质量保证累计总数法用于本论题以检测电离层的异常偏离,从而研制了能快速检测边缘电离层斜度的偏离累计总数法。故障检测显示偏离累计总数法检测较小的电离层斜度比现有的方法快,如加速度接线段、代码-载波偏离和修正检测。累计总数法在现有的代码-载波偏离法的检测速度基础上提高了30%。将偏离累计总数法和加速度接线段监控器向结合的检测时间限最短。这一方法可用于今后的精密进场和着陆。
1.6.3 联合监控器进行快速的特异故障检测
Some failures excite multiple monitors, and these failures are best detected by combining the nonitors. 一些故障会激发多个监控器运行,因此将监控器联合起来能更好地检测这些故障。监控器联合检测某种故障会比任何单个监控器更迅速[70]。本研究所开创的联合方法获得了有效的特异故障检测(ESTs)。这一论点首次提出一个数学推导来证明在理想状态下构建的特异故障检测在错误警报出现的可能性相同的情况下比单个监控器检测更快。不幸的是,标准化完整性监测试验台检测统计量的平方和实际上并不是正态分布。本文设想的γ分布超边界法用于确定特异故障检测限。用故障分析结果建立了两个特异故障检测统计量并用完整性监测试验台数据进行了测试。这两个统计量能有效提高小的卫星时钟故障和电离层斜度的检测速度。为了使局域扩增系统满足三类精密着陆对持续性的严格要求,有必要开展特异故障检测。
1.7 论文概要
Chapter 2 discusses the IMT functions, including the IMT integrity monitoring algorithms and the EXM, in detail. 第二章详细讨论了完整性监测试验台功能,包括完整性监控算法和执行监控。第三章创建了一个通用测量故障模型并分析获得了完整性监控器的故障应答通用的和另外几个已知的故障类型。第四章考察了偏离累计总数法,它能够快速检测边缘电离层斜度。第五章从理论上阐述了特异故障检测的观点并形成了两个特异故障检测统计量。第六章总结了已完成的工作,提出了未来研究的设想。图1-10对此纲要作了说明。
全球四大卫星定位系统
全球四大卫星定位系统 一.GPS系统(美国) 二.北斗系统(中国) 三.GLONASS系统(俄罗斯) 四.伽利略卫星导航系统(欧盟) GPS系统(美国) GPS系统是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。 GPS系统概述GPS系统由空间部分、地面测控部分和用户设备三部分组成。 (1)空间部分GPS系统的空间部分由空间GPS卫星星座组成。 (2)控制部分控制部分包括地球上所有监测与控制卫星的设施。 (3)用户部分GPS用户部分包括GPS接收机和用户团体。 主要功能: 导航 测量 授时
标准:全球定位系统(GPS)测量规范GB/T 18314-2001 Specifications for global positioning system (GPS) surveys 种类: GPS卫星接收机种类很多,根据型号分为测地型、全站型、定时型、手持型、集成型;根据用途分为车载式、船载式、机载式、星载式、弹载式。 北斗卫星导航系统 中国北斗卫星导航系统(BeiDou Navigation Satellite System, 统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。 段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户 度0.2米/秒,授时精度10纳秒。 系统构成 北斗卫星导航系统空间段由5颗静止轨道卫星和30颗非静止轨 道卫星组成,中国计划2012年左右,“北斗”系统将覆盖亚太地区,
《全球定位系统的应用》教案(2)(1)
第一节全球定位系统的应用 教学目的: 了解GPS原理 了解GPS在各个部门中的应用 重点与难点: GPS应用 教学过程: 地理信息技术是现代地理科学研究的主要技术手段之一,包括:GPS、RS、GIS,三者的结合即为数字地球。 [问题]你对GPS了解多少? GPS定位原理是什么呢?[阅读]探索活动。 实际上三颗卫星即可实现定位,但为了提高精度,减少误差,一般要求四颗,用于定位的四颗卫星即为定位星座。 一、全球定位系统 1、介绍:GPS,美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。目前的全球覆盖率为98%,它能够实时测量“四度”:经度、纬度、高度、速度。 2、组成: (1)空间部分:使用24颗高度约2.02万千米的卫星组成卫星星座。21+3颗卫星均为近圆形轨道,运行周期约为11小时58分,分布在六个轨道面上(每轨道面四颗),轨道倾角为55度。卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形。这就提供了在时间上连续的全球导航能力。 (2)地面监控部分包括四个监控间、一个上行注入站和一个主控站。监控站设有GPS 用户接收机、原子钟、收集当地气象数据的传感器和进行数据初步处理的计算机。监控站的主要任务是取得卫星观测数据并将这些数据传送至主控站。主控站设在范登堡空军基地。主控站主要任务是收集各监控站对GPS卫星的全部观测数据,利用这些数据计算每颗GPS卫星的轨道和时钟改正值。上行注入站也设在范登堡空军基地。它的任务主要是在每颗卫星运行至上空时把这类导航数据及主控站的指令注入到卫星。这种注入对每颗GPS卫星每天进行一次。
全球定位系统(GPS)术语及定义
全球定位系统(GPS)术语及定义 全球定位系统(GPS)术语及定义 【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:15 1范围 本标准规定了全球定位系统(GPS)常用术语及定义。 本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。 2通用术语 2.1 全球定位系统global positioning system(GPS) 导航星navigation by satellite timing and ranging(NA VSTAR) 一种卫星导航定位系统。由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。 2.2 全球导航卫星系统global navigation satellite system(GLONASS) 一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。包括军用和民用两种服务。 2.3 伽利略系统Galileo system 一种民用全球卫星导航系统; 2.4 全球导航卫星系统global navigation satellite system(GNSS) 由国际民航组织提出的概念。GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。并将由多国民间参与运行和控制的卫星导航系统。GNSS也已经为国际海事组织(IMO)所接受。欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。 2.5 静地星/定位星系统Geostar/Locstar system 一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。 2.6 海军导航卫星系统navy navigation satellite system(NNSS) 子午仪Transit 是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。 注:已于l997年12月31日关闭。 2.7 国际GPS动力学服务international GPS geodynamics service(IGS) 国际大地测量协会于1994年创立的国际GPS研究服务机构。它负责向世界各国的GPS 用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息。
全球定位系统(GPS)在军事上的应用
摘要:全球定位系统(GPS)是美国国防部开发的星基全球无线电导航系统。本文介绍了何为GPS以及它的基本特点,还介绍了GPS在军事应用中的特点和如何应用,以及GPS在新世纪的发展前景。 关键字:全球定位系统(GPS) 军事应用 Abstract: the Global Positioning System ( GPS ) is the United States Department of defense to develop satellite based global radio navigation system. This paper introduces what is GPS and its basic characteristics, GPS is also introduced in the military application characteristics and how to use, as well as GPS in the development foreground of new century. Keywords: Global Positioning System ( GPS ) Military Science Application
目录 摘要 (1) 目录 (2) 1.GPS简介 (3) 2.GPS的特点 (3) 3.GPS在军事上的应用 (3) 3.1 GPS在战场上的应用 (4) 3.1.1空中轰炸 (4) 3.1.2搜索救援 (4) 3.1.3精确制导和打击效果评估 (5) 3.1.4水下全球定位系统应用 (5) 3.1.5地面作战 (6) 3.1.6布雷扫雷 (6) 3.2 GPS在电子战争中的应用 (6) 3.2.1对敌方电子发射源的定位 (6) 3.2.2诱导导弹脱靶 (6) 3.3 GPS在武器试验中的应用 (7) 3.3.1弹道测量 (7) 3.3.2军事演习指挥监控系统 (7) 4.GPS在新世纪的发展 (8) 4.1 GPS应用于电离层监测 (8) 4.2 GPS应用于对流层监测 (8) 4.3 GPS作为卫星测高仪使用 (8) 参考文献 (9)
GPS定位系统在军事上的应用
GPS在军事上的应用 收集资料:肖成海、李汉纯 整理资料:黄生平、唐海蛟 审核资料:徐庆 GPS在军事上的应用 GPS是美国国防部开发的星基全球无线电导航系统,由绕地球运行的24颗卫星组成,卫星距地面约1.7万公里。 GPS可为全球范围内的飞机、舰船、地面部队、车辆、低轨道航天器,提供全天候、连续、实时、高精度的三维位置、三维速度以及时间数据。其主要任务是使海上舰船、空中飞机、地面用户及目标、近地空间飞行的导弹以及卫星和飞船,实现各种天气条件下连续实时的高精度三维定位和速度测定,还用于大地测量和高精度卫星授时等。是作航空,航海,陆上,导弹的定位用的导航系统。 在信息化时代,GPS已成为高技术战争的重要支持系统。它极大地提高了美军的指挥控制、多军兵种协同作战和快速反应能力,大幅度地提高了武器装备的打击精度和效能。
一、GPS在战场上的应用 在1990年的海湾战 争中,虽然当时GPS系统 还未全面 建成,空间只有部分GPS 卫星在运行,但它在多国 部队多兵种应用,显示了 它的优越性,发挥了很大 的作用。 战争初期,美国装备了 900 套GPS接收机,在战 争中迅速增加,到战争后期装备了5,000 多套。连同它的盟国部队共装备了10,000 多套。直到战争结束还有数千套合同产品还在生产中。 因为当时多国部队是跨国界、跨地区作战,地理环境相当陌生,仅依靠地图是实在有限的,据说正是因为有了手持型GPS的帮助,才使许多美国士兵得以生还。事实证明它最适合单兵及快速反应部队行动,因为它满足快速、灵活、多变的战时环境,功效是传统导航工具无法达到的。目前已成为许多国外士兵的标准装备之一。
全球四大卫星导航系统对比
简单对比全球四大卫星导航系统 2011年12月27日,对于中国的高精度测绘定位领域来说是一个不平凡的日子,中国北斗卫星导航系统(CNSS)正式向中国及周边地区提供连续的导航定位和授时服务,这是世界上第三个投入运行的卫星导航系统。 在此之前,美国的全球定位系统(GPS)和俄罗斯的格洛纳斯卫星导航系统(GLONASS)早在上世纪90年代就已经建成并投入运行。与此同时,欧盟也在打造自己的卫星导航系统——“伽利略”计划。 那么,这四大卫星导航系统之间到底有着怎么样的区别和联系呢?下面,就让我们来逐个分析一下,通过四大卫星导航系统的优劣分析,给大家一个较为明显的概念。 四大卫星导航系统各有优势,详情如下: GPS:成熟 GPS,作为大家最为熟悉的定位导航系统,她最大的特点就是技术方面最为成熟。 美国“全球定位系统”(GPS),是目前世界上应用最广泛、也是技术最成熟的导航定位系统。GPS空间部分目前共有30颗、4种型号的导航卫星。1994年3月,由24颗卫
星组成的导航“星座”部署完毕,标志着GPS正式建成。 中国北斗:互动开放 北斗卫星导航系统是中国正在实施的自主发展、独立运行的全球卫星导航系统。系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统。北斗卫星导航系统由空间段、地面段和用户段三部分组成。目前市面上定位导航仪器公司如国外的天宝、拓普康,国内的华测导航等都已支持北斗卫星导航定位系统。 欧盟伽利略:精准 伽利略定位系统是欧盟一个正在建造中的卫星定位系统,有“欧洲版GPS”之称。伽利略定位系统总共发射30颗卫星,其中27颗卫星为工作卫星,3颗为候补卫星。该系统除了30颗中高度圆轨道卫星外,还有2个地面控制中心。 俄罗斯格洛纳斯:抗干扰能力强 早在美苏冷战时期,美国和苏联就各项技术特别是空间技术方面争锋相对,在美国GPS技术遍布全国的同时,苏联也没闲着,一直忙于研发自己的全球导航定位系统。俄罗斯的这套格洛纳斯系统便是其不断努力的结果。格洛纳斯由24颗卫星组成,也是由军方负责研制和控制的军民两用导航定
全球四大卫星导航系统
全球四大卫星导航系统 美国GPS系统 目前世界使用最多的全球卫星导航定位系统是美国的GPS系统。它是世界上第一个成熟、可供全民使用的全球卫星定位导航系统。该系统由28颗中高轨道卫星组成,其中4颗为备用星,均匀分布在距离地面约20000千米的6个倾斜轨道上。 俄罗斯格洛纳斯系统 格洛纳斯是前苏联国防部于20世纪80年代初开始建设的全球卫星导航系统,从某种意义上来说是冷战的产物。该系统耗资30多亿美元,于1995年投入使用,现在由俄罗斯联邦航天局管理。格洛纳斯是继GPS之后第2个军民两用的全球卫星导航系统。 欧洲伽利略系统 伽利略系统是欧空局与欧盟在1999年合作启动的,该系统民用信号精度最高可达1米。 计划中的伽利略系统由30颗卫星组成。2005年12月28日,首颗实验卫星Glove-A发射成功,第2颗实验卫星Glove-B在2007年4月27日由俄罗斯联盟号运载火箭于哈萨克斯坦的拜科努尔基地发射升空。 中国北斗系统 北斗全球卫星定位导航系统由5颗静止轨道卫星和30颗非静止轨道卫星组成,提供开放服务和授权服务两种模式。根据系统建设总体规划,2020年左右,建成覆盖全球的北斗卫星导航系统。 2011年4月10日,我国成功发射第八颗北斗导航卫星,标志着北斗区域卫星导航系统的基本系统建设完成,我国自主卫星导航系统建设进入新的发展阶段。从当初的“最高机密”,到今日向民用市场推广,北斗计划已经走过了20多年。曾经的主力科学家已经成了白发苍苍的院士,北斗系统的理论创始人也已经故去。4月10日4时47分,我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第八颗北斗导航卫星送入太空预定转移轨道。这是一颗倾斜地球同步轨道卫星。这颗卫星将与2010年发射的5颗导航卫星共同组成“3+3”基本系统(即3颗GEO卫星加上3颗IGSO卫星),经一段时间在轨验证和系统联调后,将具备向我国大部分地区提供初始服务条件。今明两年,我国还将陆续发射多颗组网导航卫星,完成北斗区域卫星导航系统建设,满足测绘、渔业、交通运输、气象、电信、水利等行业,以及大众用户的应用需求。 中国卫星导航系统管理办公室负责人冉承其介绍,目前,北斗卫星导航系统正按照“三步走”发展战略稳步推进第一步,2003年建成北斗导航试验系统。系统由三颗地球同步静止轨道卫星和地面系统组成,可为我国及周边地区的中、低动态用户提供定位、短报文通信和授时服务,已应用于水利、渔业、交通、救援等国民经济领域,经济和社会效益显著。第二步,2012年左右,将建成由10余颗卫星组成的北斗区域卫星导航系统,具备覆盖亚太地区的服务能力,采用无源定位体制,具有定位、导航、授时以及短报文通信功能。第三步,2020年左右,建成由30余颗卫星组成,覆盖全球的北斗全球卫星导航系统,系统性能达到同期国际先进水平。 北斗卫星导航系统除了能够提供高精度、高可靠的定位、导航和授时服务,还保留了北斗卫星导航试验系统的短报文通信、差分服务和完好性服务特色,是我国经济社会发展不可或缺的重大空间信息基础设施。
全球定位系统及其应用高二新人教版教案
全球定位系统及其应用高二新人教版教案 The document was prepared on January 2, 2021
第三节全球定位系统及其应用 典型例题 1、关于全球定位系统的说法正确的是 A、全球定位系统只能获得地面某点的经纬度,不能确定其高程 B、全球定位系统由3个相对独立的部分组成,即空间部分、地面监控系统和用户设备部分 C、全球定位系统具有高精度和自动测量的特点,但是受地形、天气等自然因素影响较大 D、目前GPS主要应用于军事领域 解析:全球定位系统即GPS,它是利用卫星网络来获得地面某点的经纬度和高程的系统。全球定位系统由3个相对独立的部分组成,即空间部分、地面监控系统和用户设备部分。空间部分由分布在距地面20200千米的6个轨道面上的24颗卫星(其中3颗备用) 组成;地面监控系统主要用于监测和控制卫星上各种设备是否正常工作,以及卫星是否沿预定轨道运行;用户设备部分为GPS接收机。全球定位系统具有全天候、高精度和自动测量的特点,因此它作为先进的测量手段和新的生产力,已经融人了国民经济建设、国防建设和社会发展的各个应用领域。目前GPS的主要功能是定位和导航,这在各个应用领域如军事、测量、交通、求援、农业、娱乐等方面都有所体现。 答案: A 2、GPS技术给测绘界带来了一场革命,下列说法不正确的是 A、利用GPS技术,测量精度可以达到毫米级的程度 B、与传统的手工测量手段相比,GPS技术有着测量精度高的优点 C、GPS技术操作简便,仪器体积小,便于携带 D、当前,GPS技术已广泛应用于大地测量、资源勘查、地壳运动观测、地籍测量等领域 解析: GPS技术给测绘界带来了一场革命。利用GPS技术,测量精度可以达到厘米级的程度。与传统的手工测量手段相比,GPS技术有着巨大的优势:测量精度高;操作简便,仪器体积小,便于携带;全天候操作;信息自动接收、存储,减少了繁琐的中间处理环节。当前,GPS技术已广泛应用于大地测量、资源勘查、地壳运动观测、地籍测量等领域。 答案:A 基础练习 一、选择题 1、最先进行全球定位系统研制的国家和时间是 A、美国 20世纪70年代初 B、日本 20世纪60年代初 C、德国 20世纪70年代初 D、苏联 20世纪60年代初 2、全球定位系统的空间部分由分布在距地面20200千米的6个轨道面上的多少颗卫星组成 A、3 B、4 C、12 D、24 3、全球定位系统由3个相对独立的部分组成,即
全球定位系统及其应用
全球定位系统及其应用 3教案 【教学构思】本节课主要结合教学内容和课标理念,充分发挥学生的动力优势,采用结合实际的方法进行教学,培养学生的地理思维能力,达到教养性、教育性、发展性的目的,同时把学生熟悉的地理事物、地理现象引入课堂,引导学生对比分析,培养学生联系实际的能力、综合评价的能力以及学生小组的协作能力。 教材分析是第三章的第三节,在内容上比较独立,前后联系不大,车载导航比较接近生活, 全球定位系统是地理信息系统的核心技术之一。本节教学内容是初步了解地理信息技术的前提和基础。 地理信息技术是现代地理科学研究的关键技术。地理信息技术科学体系主要由地理信息系统、遥感、全球定位系统三方面的核心技术组成。此三种技术的综合应用又称为3S 技术,3S技术也是数字地球的关键技术。 全球定位系统以其高技术含量及全方位、定位三维导航与定位功能而广泛应用于旅游交通、军事和野外勘探等众多领域。 【教学设计】 一、教学目标
知识与技能: .能用自己的语言解释全球定位系统的概念,并初步了解其工作原理; .能说出全球定位系统的三个组成部分及其主要功能; 能说出GPS接收机的主要种类及其主要用途; 能举例说明全球定位系统在定位导航中的作用。 过程与方法: 通过读“GPS组成示意图”,分析全球定位系统的组成,并讨论该系统的功能; 通过多种媒体收集有关资料,列出讨论探讨我国导航定位技术的发展; 通过“车载GPS功用”的案例,初步认识全球定位系统的定位导航原理及作用。 情感态度和价值观 通过对全球定位系统神奇功能及广泛应用领域的介绍,激发学生的求知欲和科学探究精神; 通过对迅速发展的中国定位导航技术的学习,增强学生的民族自信心和爱国情感 二、教学重难点 重点:结合实例说出全球定位系统在定位导航中的应用。 难点:全球定位系统的工作原理。
第三节 全球定位系统及其应用
第三节全球定位系统及其应用 【教学构思】本节课主要结合教学内容和课标理念,充分发挥学生的动力优势,采用结合实际的方法进行教学,培养学生的地理思维能力,达到教养性、教育性、发展性的目的,同时把学生熟悉的地理事物、地理现象引入课堂,引导学生对比分析,培养学生联系实际的能力、综合评价的能力以及学生小组的协作能力。 教材分析《全球定位系统及其应用》是第三章的第三节,在内容上比较独立,前后联系不大,车载导航比较接近生活, 全球定位系统是地理信息系统的核心技术之一。本节教学内容是初步了解地理信息技术的前提和基础。 1.地理信息技术是现代地理科学研究的关键技术。地理信息技术科学体系主要由地理信息系统(GIS)、遥感(RS)、全球定位系统(GPS)三方面的核心技术组成。此三种技术的综合应用又称为3S技术,3S技术也是数字地球的关键技术。 2.全球定位系统以其高技术含量及全方位、定位三维导航与定位功能而广泛应用于旅游交通、军事和野外勘探等众多领域。 【教学设计】 一、教学目标 (一)知识与技能: 1.能用自己的语言解释全球定位系统的概念,并初步了解其工作原理; 2.能说出全球定位系统的三个组成部分及其主要功能; 3 能说出GPS接收机的主要种类及其主要用途; 4. 能举例说明全球定位系统在定位导航中的作用。 (二)过程与方法: 1通过读“GPS组成示意图”,分析全球定位系统的组成,并讨论该系统的功能; 2通过多种媒体收集有关资料,列出讨论探讨我国导航定位技术的发展; 3通过“车载GPS功用”的案例,初步认识全球定位系统的定位导航原理及作用。 (三)情感态度和价值观 1. 通过对全球定位系统神奇功能及广泛应用领域的介绍,激发学生的求知欲和科学探究精神; 2. 通过对迅速发展的中国定位导航技术的学习,增强学生的民族自信心和爱国情感 二、教学重难点 重点:结合实例说出全球定位系统(GPS)在定位导航中的应用。 难点:全球定位系统的工作原理。 三、教学方法 读图分析法、探究法、阅读法 四、导-教学过程 ㈠知识体系; 学习提供 一、全球定位系统 1、全球定位系统的概念 2、全球定位系统的组成 3、全球定位系统的特点 4、GPS接收机根据用途分类 二、全球定位系统与定位导航
全球四大导航系统
全球四大卫星定位系统 目前,世界上只有少数几个国家能够自主研制生产卫星导航系统。当前全球有四大卫星定位系统,分别是美国的全球卫星导航定位系统GPS、俄罗斯的格罗纳斯GLONASS系统、欧洲在建的"伽利略"系统、和中国的北斗卫星导航系统。 一、美国GPS长期垄断 美国国防部从1973年开始实施的GPS系统,这是世界上第一个全球卫星导航系统,在相当长的一段时间内垄断了全球军用和民用卫星导航市场。GPS全球定位系统计划自1973年至今,先后共发射了41颗卫星,总共耗资190亿美元。GPS原来是专门用于为洲际导弹导航的秘密军事系统,在1991年的海湾战争中首次得到实战应用。随后,在科索沃战争、阿富汗战争和伊拉克战争中大显身手。从克林顿时代起,该系统开始应用在了民用方面。现运行的GPS系统由24颗工作卫星和4颗备用卫星组成。美国利用GPS获得了巨大的经济利益,多年来在出售信号接收设备方面赚取了巨额利润。以1986年为例,当时一台一般精度的GPS定位仪价格5万美元,高精度的则达到10万美元。现在价格虽然有所下降,但也可推算出20年来GPS"收获颇丰"。以GPS为代表的卫星导航定位应用产业,已成为八大无线产业之一。据美国国家公共管理研究院进行的调查评估表明,GPS的全球销售额将以每年38%的速度增长,2005年全球GPS市场已达到310亿美元。长期以来,美国对本国军方提供的是精确定位信号,对其他用户提供的则是加了干扰的低精度信号--也就是说,地球上任何一个目标的准确位置,只有美国人掌握,其他国家只知道个"大概"。在海湾战争时,美国还曾置欧盟各国利益不顾,一度关闭对欧洲GPS服务。 2003年3月20日,伊拉克战争爆发。大批轰炸机、战斗机猛扑向伊拉克首都巴格达,用炸弹准确地将一座建筑彻底摧毁,行动代号:"斩首行动";4月,一架B-1B"枪骑兵"轰炸机临时接到任务,用炸弹摧毁了另一座建筑。他们的目标都是一个人:萨达姆侯赛因,他们所使用的炸弹都是一种:联合攻击炸弹(JDAM),这些炸弹之所以都能够精确的打击目标,是因为他们都是通过卫星定位来实现定位,提供这种定位服务的正是由24颗美国卫星组成的全球定位系统--GPS。 由于GPS技术所具有的全天候、高精度和自动测量的特点,作为先进的测量手段和新的生产力,已经融入了国民经济建设、国防建设和社会发展的各个应用领域。 随着冷战结束和全球经济的蓬勃发展,美国政府宣布,在保证美国国家安全不受威胁的前提下,取消SA政策,GPS民用信号精度在全球范围内得到改善,利用C/A码进行单点定位的精度由100米提高到10米,这将进一步推动GPS技术的应用,提高生产力、作业效率、科学水平以及人们的生活质量,刺激GPS市场的增长。 二、俄罗斯GLONASS(格洛纳斯)系统 "格洛纳斯GLONASS"是俄语中"全球卫星导航系统GLOBAL NAVIGATION SATELLITE SYSTE"的缩写。作用类似于美国的GPS、欧洲的伽利略卫星定位系统。最早开发于苏联时期,后由俄罗斯继续该计划。俄罗斯1993年开始独自建立本国的全球卫星导航系统。1995年俄罗斯耗资30多亿美元,完成了GLONASS导航卫星星座的组网工作。它也由24颗卫星组成,原理和方案都与GPS类似,不过,其24颗卫星分布在3个轨道平面上,这3个轨道平面两两相隔120°,同平面内的卫星之间相隔45°。每颗卫星都在19100千米高、64.8°倾角的轨道上运行,轨道周期为11小时15分钟。地面控制部分全部都在俄罗斯领土境内。俄罗斯自称,多功能的GLONASS系统定位精度可达1米,速度误差仅为15厘米/秒。如果必要,该
全球定位系统介绍
全球卫星定位系统 名词简介 全球卫星定位系统(Globle Positioning System) 是一种结合卫星及通讯发展的技术,利用导航卫星进行测时和测距。全球卫星定位系统(简称GPS) 是美国从本世纪70 年代开始研制,历时20 余年,耗资200 亿美元,于1994 年全面建成。具有海陆空全方位实时三维导航与定位能力的新一代卫星导航与定位系统。经过近十年我国测绘等部门的使用表明,全球卫星定位系统以全天候、高精度、自动化、高效益等特点,成功地应用于大地测量、工程测量、航空摄影、运载工具导航和管制、地壳运动测量、工程变形测量、资源勘察、地球动力学等多种学科,取得了好的经济效益和社会效益。 发展历程 自1978年以来已经有超过50颗GPS和NAVSTAR卫星进入轨道. 前身 GPS系统的前身为美军研制的一种子午仪卫星定位系统(Transit),1958年研制,64年正式投入使用。该系统用5到6颗卫星组成的星网工作,每天最多绕过地球13次,并且无法给出高度-{A|zh-cn:信息;zh-tw:资讯}-,在定位精度方面也不尽如人意。然而,子午仪系统使得研发部门对卫星定位取得了初步的经验,并验证了由卫星系统进行定位的可行性,为GPS系统的研制埋下了铺垫。由于卫星定位显示出在导航方面的巨大优越性及子午仪系统存在对潜艇和舰船导航方面的巨大缺陷。美国海陆空三军及民用部门都感到迫切需要一种新的卫星导航系统。为此,美国海军研究实验室(NRL)提出了名为Tinmation的用12到18颗卫星组成10000km高度的全球定位网计划,并于67年、69年和74年各发射了一颗试验卫星,在这些卫星上初步试验了原子钟计时系统,这是GPS系统精确
全球四大卫星定位系统
全球四大卫星导航系统简介 一、美国的GPS 系统: 美国的GPS系统,由24 颗(3 颗为备用卫星) 在轨卫星组成。 的信号有两种GPS码。码,P C/A 米。一般的接收机利用29.3m 到2.93 民用:
C/A 码的误差是码计算 C/A 代中期为了自身的安全考虑,在信号上加入了90 定位。美国在 米左右。在 SA(SelectiveAvailability),令接收机的误差增大,到100 精度应该能在GPS年2000 5 月2 日,SA取
消,所以,咱们现在的米以内。20 码P C/A 0.293 米是码的十分之一。但是2.93 军用:P 码的误差为米到 AS(Anti-Spoofing) 只能美国军方使用,码上加上的干扰信号。P,是在 二、中国的“北斗”卫星导航定位系统:“北斗”卫
星导航定位系统需要发射35 颗卫星,足足要比GPS多出11 颗。按照规划,“北斗”卫星导航定位系统将有 5 颗静止轨道 卫星和30 颗非静止轨道卫星组成,采用“东方红”-3 号卫星平台。30 颗非静止轨道卫 星又细分为27 颗中轨道(MEO)卫星和3 颗倾斜同步(IGSO) 卫星组成,27 颗MEO卫星平均分布在倾
角55 度的三个平面上, 轨道高度21500 公里。“北斗” 卫星导航定位系统将提供开放服务和授权服务。开放服务在服务区免费提供 纳秒,测速精度50 定位,测速和授时服务,定位精度为10 米,授时精度为 为0.2 米/ 秒。授权服务则是军事用途的马甲,将向授权用户提供更安全与更
高精度的定位,测速,授时服务,外加继承自北斗试验系统的通信服务功 能,精度可以达到重点地区水平10 米,高程10 米,其他大部分地区水平20 的水平是差不多的。秒。这和美国GPS 0.2 米/ 米,高程20 米;测速精度优于 另外,“北斗一号”还可以提供用户的双向通讯功能,
全球定位系统的应用
全球定位系统的应用 1.大地控制测量在GPS技术发展之前,人们主要用传统的经纬仪、测距仪及全站仪进行大地测量,费时、费力。GPS发展起来之后,人们用GPS建立全球、全国及区域性的高精度地面控制网,拟合大地水准面,进行大地测量,精度高、速度快、费用省。 2.航空摄影测量摄影测量是利用摄影所得的相片,研究和确定被摄物体形状、大小、位置、属性和相关关系的一门技术。在GPS出现之后,人们利用GPS辅助航空摄影测量,不仅减少了地面控制点的数目,而且还缩短了成图周期,降低了成本。 3.海洋测绘GPS在海洋测绘中的应用主要包括海上定位、海洋大地测量和水下地形测量三方面。海上定位通常指在海上确定船只的位置,进行舰船导航。海洋大地测量和水下地形测量主要包括在海洋范围内用GPS布设大地控制网,进行海洋重力测量,然后在此基础上进行水下地形测量,测定大地水难面。 4.交通指挥调度随着城市规模的扩大,车辆日益增多,交通运输管理和合理调度,警用车辆的指挥和安全管理成了公安、交通系统中的一个重要问题。GPS定位技术的发展为交通管理和调度提供了良好的技术支持。人们借助车载GPS接受机使驾驶员能够随时知道自己的具体位置,并将这些信息通过车载电台发射给调度指挥中心,进行适时指挥调度。 5.航海导航在茫茫的大海中,船只的航行需要有适时的导航。GPS系统的出现和应用为海上船只航行提供了连续、高精度的七维信息(时空位置、速度等),保证了最小航行交通冲突、最大限度地利用日益拥挤的航路,提高了航行安全度和航海效益。 6.航空导航GPS系统的发展也为航空导航提供了高精度、连续导航技术。目前,GPS 导航技术已经广泛应用于空中导航与监视、进场与着陆、机场场面监测与管理、航路监测、飞行测试和特种飞机的救援与搜索。 近年来,除了GPS技术在进步外,遥感技术和地理信息系统技术也获得了巨大发展。RS、GIS和GPS技术的集成,构成了整体、适时、动态的对地观测、分析和应用系统,便于空间数据的及时采集、更新和处理,使GPS的应用拥有了更加广阔的前景。
全球定位系统及其功能
全球定位系統及其功能 全球定位系統(GPS)是一導航系統,在六十年 代籌劃,七十年代測試,而一系列的人造衛星 則在1989至1993年間發射升空。最初,美國 政府發展這系統的目的是防衛,從1983年 起,才開放給民間使用。全球定位系統已製造 了十萬多個職位,成為一個數以億元計算的工 業。系統是由二十四顆圍繞地球的人造衛星所 組成,每顆衛星距離地球表面約12,000哩, 使人可以確定自己在地球上的位置,準確程度 是幾百尺以內。 全球定位系統的應用 利用全球定位系統,可以求出我們的地理位置(經度及緯度)、高度、速度及方向,全球定位系統在陸地、海上及空中都有很多用途。 全球定位系統可用於 ?飛機導航 ?船隻導航 ?汽車導航 ?測量 ?戶外活動,例如︰遠足 ?追蹤 ?緊急救援,例如︰救護及火警 ?繪製地圖 ?軍事用途 全球定位系統的三個主要部份 全球定位系統包括以下三個主要部份 一、太空部份(人造衛星) 二、地面控制部份(地面控制站) 三、使用者接收部份(使用者及衛星接收機)
顯示它的位置及時間。 地面控制部份包括地面控制站,負責監測及控制衛星。 使用者接收部份包括使用者及衛星接收機,接收機量度衛星信號及求出使用者的位置。 全球定位系統是如何定位? 衛星是平均分佈,使地球上任何一個位置,都可觀看到最少四顆衛星。每顆衛星不斷地傳送無線電信號,播放它的位置及時間。 全球定位系統以衛星的位置作為參考,求出我們在地球上的位置。衛星接收機量度信號由衛星傳送到接收機所需的時間,從而計算出接收機與衛星的距離,這距離是等於所需時間乘以光速,即是 距離=所需時間x光速
地面接收機準確量度與三顆衛星的距離,再利用電腦便可求出本身的位置,其地理位置可以經度及緯度顯示。 如果可以接收到第四顆衛星的信號,接收機除了可以顯示我們的地理位置,也可顯示我們的高度。 全球定位系統的限制 在接收不到衛星信號的地方,例如︰山洞、大廈內、地底、水底等,我們便不能使用全球定位系統,此外,全球定位系統接收機所提供的位置可能有誤差。
全球定位系统
第三节全球定位系统及其应用导学案学习目标 1.了解全球定位系统的概念、起源和发展。2.掌握GPS的三个组成部分及其主要功能。3.了解GPS接收机的主要种类及其用途。4.能举例说明全球定位系统在定位导航中的作用。知识清单 任务一:全球定位系统 1.全球定位系统(Global positioning system,简称GPS)是具有在海、陆、空进行全方位、实时①______导航与②______功能的新一代卫星导航与定位系统。 2.在GPS使用之前,远程导航与定位主要采用③________系统。但无线电导航覆盖的工作区域④____,电波传播受⑤______影响,定位精度不高。1958年,美国研制了世界上最早的卫星定位系统——⑥________系统(TRANSIT)。 3.GPS系统由三个部分组成:⑦______星座、⑧__________系统、⑨________系统——GPS 信号⑩________。 (1)空间星座——GPS卫星星座:由?____颗工作卫星、?____颗备用卫星组成。 (2)地面监控系统:包括1个主控站、3个注入站和5个监控站。 (3)用户系统:用于接收GPS卫星发射的信号。GPS接收机包括接收机硬件、GPS数据处理软件等用户设备。GPS硬件由?______单元和?______单元两大部分组成。GPS接收机能够捕获到GPS卫星的信号,实时地计算出?________、?______以及?______。 4.根据用途分类,GPS接收机有以下几种: (1)?______型接收机:主要用于运动载体的导航,实时给出载体的位置和速度。此类接收机价格便宜,应用广泛。 (2)?______型接收机:主要用于精密大地测量和精密工程测量。定位精度高,仪器结构复杂,价格较高。 (3)?______接收机:主要利用GPS卫星提供的高精度时间标准进行授时,多用于天文台及无线电通讯。 任务二:全球定位系统与定位导航 1.精度高:GPS最初设计主要是出于①______目的,其静态导航定位精度可达厘米级甚至毫米级的精度。 2.应用领域:用途广泛,已在②______、邮电、③______、建筑、农业、气象、④________、金融、公安等部门和行业得到广泛应用。此外,科学家用它监测地壳的微小移动,预报地震;与GIS、RS结合,为⑤________、工程管理、⑥________服务等。 基础达标练 考查点1全球定位系统的组成 1.下列有关全球定位系统构成的叙述,正确的是() A.全球定位系统由24颗卫星、航天飞机、空间试验室等组成 B.由主控站、监控站和信息注入站组成 C.主要由GPS卫星接收机和GPS数据处理软件等组成 D.GPS主要由空间卫星系统、地面监控系统、用户设备系统构成 考查点2GPS接收机的组成 2.组成GPS接收机硬件的两大单元是() A.接收机硬件、数据处理软件B.天线单元、接收单元 C.发射单元、接收单元D.接收单元、处理单元 考查点3全球定位系统的功能 3.无论是在飞机或汽车上,还是在野外考察旅行途中,只要拥有手机大小的GPS信号接收机,你就能随时知道()
全球四大卫星定位系统
全球四大卫星定位系统 说起卫星定位导航系统,人们就会想到GPS,但是现在,伴随着众多卫星定位导航系统的兴起,全球卫星定位导航系统有了一个全新的称呼:GNSS(Global Navigation Satellite System)。当前,在这一领域最吸引人眼球的要数美国的GPS卫星导航系统;此外,还有俄罗斯的“格洛纳斯”导航卫星系统,欧盟的“伽利略”导航卫星系统,以及我国自主开发的“北斗”导航卫星系统。 一、美国GPS系统 GPS(Global Position System)全球定位系统是目前最成熟的卫星定位导航系统。它是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。 GPS全球定位系统由空间系统、地面控制系统和用户系统三大部分组成。其空间系统由21颗工作卫星和3颗备份卫星组成,分布在20200千米高的6个轨道平面上,运行周期12小时。地球上任何地
方任一时刻都能同时观测到4颗以上的卫星。地面控制系统负责卫星的测轨和运行控制。用户系统为各种用途的GPS 接收机,通过接收卫星广播信号来获取位置信息,该系统用户数量可以是无限的。 GPS全球定位系统是美国为军事目的而建立的。1983年一架民用飞机在空中因被误以为是敌军飞机而遭击落后,美国承诺GPS免费开放供民间使用。美国为军用和民用安排了不同的频段,并分别广播了P码和C/A码两种不同精度的位置信息。目前美国军用GPS精度可达1米,而民用GPS理论精度只有10米左右。特别地,美国在90代中期为了自身的安全考虑,在民用卫星信号上加入了SA (Selective Availability),进行人为扰码,这使得一般民用GPS接收机的精度只有100米左右。2000年5月2日,SA干扰被取消,全球的民用GPS 接收机的定位精度在一夜之间提高了许多,大部分的情况下可以获得10米左右的定位精度。美国之所以停止执行SA政策,是由于美国军方现已开发出新技术,可以随时降低对美国存在威胁地区的民用GPS 精度,所以现在这种高精度的GPS技术才得以向全球免费开放使用。 受应用需求的刺激,民用GPS技术蓬勃发展,出现了DGPS(差分GPS)、WAAS(地面广播站型态的修正技术)等技术,进一步提高民用GPS的应用精度。2005年,美国开始发射新一代GPS卫星,开始提供第二个民用波段。未来还将提供第三,第四民用波段。随着可用波段的增加,新卫星陆续使用,GPS定位系统的精度和稳定性都比
全球定位系统的应用、发展与未来
全球定位系统的应用、发展与未来 摘要:本文主要阐述了GPS系统的发展历史、组成原理及应用情况,对全球及我国卫星导航定位行业的市场现状进行了初步分析,比较了GPS和格洛纳斯、伽利略及北斗系统的特点与差异,最后对全球定位系统的未来进行了展望。 关键词: GPS 格洛纳斯伽利略北斗定位系统 GNSS市场调查 GPS应用 The Application, Development and Future of Global Positioning System Abstract: This paper outlines the historical status, compositing and application of the GPS system. Analyse the market of the satellite navigation and positioning on global and China. Compared among the GPS, GLONASS,GALLEO and Beidou,System. At the end of this article, prospect the future of global positioning system. Key Words: GPS GLONASS GALLEO Beidou GNSS market research Application of GPS 1GPS系统概述 GPS是英文Global Positioning System(全球定位系统)的简称,其中文简称为“球位系”。GPS是一种定时和测距的空间交会定点的导航系统,可以向全球用户提供连续、实时、高精度的三维位置、三维速度和时间信息。在今天,GPS作为一种先进的测量手段和新的生产力,已融入到国民经济建设、国防建设和社会发展的各个应用领域。 1.1GPS的发展历程 1957年10月前苏联成功发射了第一颗人造卫星后,美国海军就着手卫星定位方面的研究工作,产生了子午卫星导航系统(NNSS)。该系统又称多普勒卫星定位系统,它是58年底由美国海军武器实验室开始研制,于64年建成的“海军导航卫星系统”(Navy Navigation Satellite System)。这是人类历史上诞生的第一代卫星导航系统。 子午卫星导航系统由卫星网、地面跟踪站、计算中心、注入站、美国海军天文台和用户接收设备六部分组成。其定位原理是通过测定同一颗卫星不同间隔时段其信号的多普勒效应,从而确定卫星在各时段相对观察者的视向速度和视向位移;再利用卫星导航电文所给定的不同时刻的卫星空间坐标,结合对应的视向位移则可解算出测站空间坐标。 子午卫星导航系统将导航和定位技术推向了一个新的发展时代,在各领域都得到了广泛的应用,并显现出了巨大的优越性。但由于其自身存在的定位时间过长、无法测量高度、定位精度偏低等缺陷,使得该系统服役不久,就迫使美国国防部不得不着手研究第二代的卫星导航系统——全球定位系统(GPS)。 *指导老师:马磊学生姓名:郑鹤学号:20082110 GPS计划经历了方案论证(1974~1978年),系统论证(1979~1987年),试验生产(1988~1993年)三个阶段,总投资300亿美元。论证阶段发射了11颗BlockⅠ型GPS实验卫星(设计使用寿命为5年);在试验生产阶段发射了28颗BlockⅡ型和BlockⅡA型GPS工作卫星(第二代卫星的设计使用寿命为7.5年);第三代改善型GPS卫星BlockⅡR和BlockⅢ型GPS工作卫星从90年代末开始发射,计划发射20颗,以逐步取代第二代GPS工作卫星,改善全球定位系统。 1.2GPS系统的组成 GPS系统由空间部分、控制部分和用户部分组成。 空间部分是由24颗卫星组成(21颗工作卫星;3颗备用卫星),它们位于距地表20200km的上空,均匀分布在6 个轨道面上(每个轨道面4 颗),轨道倾角为55°。卫星运行周期为11小时58分。卫星通过天顶附近时可观测时间为5小时,在地球表面任何地方任何时刻高度角15度以上的可观测卫星至少有4颗,平均有6颗,最多达11颗。 图1 GPS系统空间部分模型 地面控制系统由五个监控站、三个地面天线所组成,主控制站位于美国科罗拉多州春田市(Colorado Spring)。地面控制站负责收集由卫星传回的讯息,并计算卫星星历、相对距离,大气校正等数据。地面天线则主要负责将主控站推算和编制的卫星星历、 导航