【CN209460399U】一种激光雷达和相机外部参数标定用的标定板【专利】
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920179618.7
(22)申请日 2019.02.01
(73)专利权人 成都信息工程大学
地址 610225 四川省成都市西南航空港经
济开发区学府路一段24号
(72)发明人 蒋涛 罗双 袁建英 张瑜
刘甲甲 付克昌 张国良 贺喜
周杨 程永杰 代成 秦豪
邢修华 钟卓男
(74)专利代理机构 北京远大卓悦知识产权代理
事务所(普通合伙) 11369
代理人 贾晓燕
(51)Int.Cl.
G01S 7/497(2006.01)
G01S 7/481(2006.01)
(54)实用新型名称
一种激光雷达和相机外部参数标定用的标
定板
(57)摘要
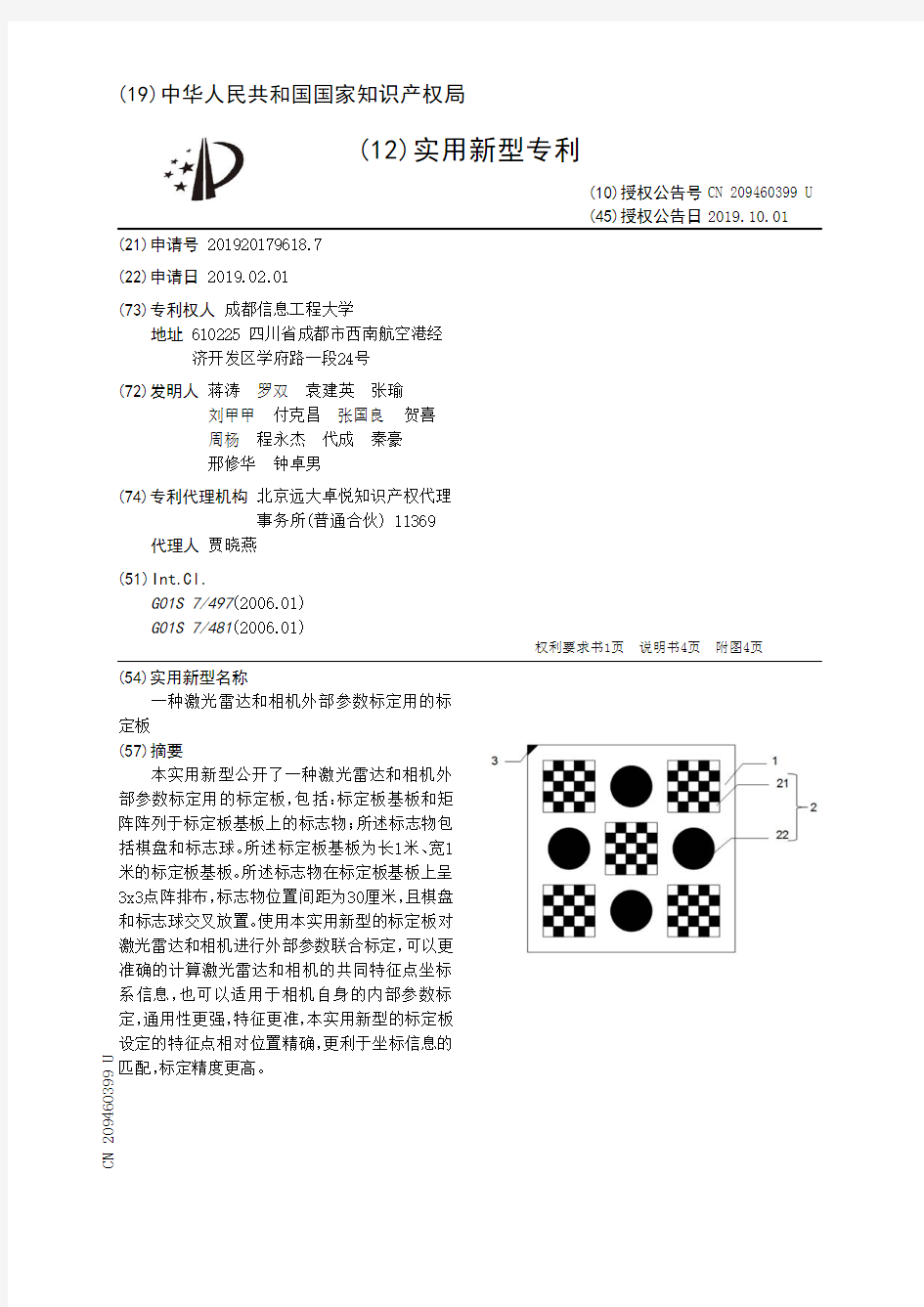
本实用新型公开了一种激光雷达和相机外
部参数标定用的标定板,包括:标定板基板和矩
阵阵列于标定板基板上的标志物;所述标志物包
括棋盘和标志球。所述标定板基板为长1米、宽1
米的标定板基板。所述标志物在标定板基板上呈
3x3点阵排布,标志物位置间距为30厘米,且棋盘
和标志球交叉放置。使用本实用新型的标定板对
激光雷达和相机进行外部参数联合标定,可以更
准确的计算激光雷达和相机的共同特征点坐标
系信息,也可以适用于相机自身的内部参数标
定,通用性更强,特征更准,本实用新型的标定板
设定的特征点相对位置精确,更利于坐标信息的匹配,
标定精度更高。权利要求书1页 说明书4页 附图4页CN 209460399 U 2019.10.01
C N 209460399
U
权 利 要 求 书1/1页CN 209460399 U
1.一种激光雷达和相机外部参数标定用的标定板,其特征在于,包括:
标定板基板和矩阵阵列于标定板基板上的标志物;所述标志物包括棋盘和标志球。
2.如权利要求1所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标定板基板为长1米、宽1米的标定板基板。
3.如权利要求1所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标志物在标定板基板上呈3x3点阵排布,标志物位置间距为30厘米,且棋盘和标志球交叉放置。
4.如权利要求3所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述棋盘个数共五个,边长为25厘米,厚10厘米,棋盘上的棋盘格为边长5厘米的黑白格;五个所述棋盘中的四个棋盘位于标定板基板的四个拐角处,剩余一个棋盘位于标定板基板的中部。
5.如权利要求4所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标志球个数为四个,半径为20厘米,四个所述标志球分别位于标定板基板的侧边的中部位置。
6.如权利要求3所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标志球个数共五个,半径为20厘米,五个所述标志球中的四个标志球位于标定板基板的四个拐角处,剩余一个标志球位于标定板基板的中部。
7.如权利要求6所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述棋盘个数为四个,边长为25厘米,厚10厘米,棋盘上的棋盘格为边长5厘米的黑白格;四个所述棋盘分别位于标定板基板的侧边的中部位置。
8.如权利要求1所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标定板基板为白色;所述标志球为黑色;所述棋盘为黑白格相间的棋盘。
9.如权利要求1所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述标定板基板的一个拐角上设置有黑色三角。
10.如权利要求1所述的激光雷达和相机外部参数标定用的标定板,其特征在于,所述棋盘和标志球均分别采用4颗螺栓固定连接在标定板基板上。
2
康耐视相机操作手册
康耐视相机操作使用说明书 文件状态: ■草稿□修改□定稿文档密级□不保密■内部□机密 项目名称 版本号 1.0 描述康耐视相机操作使用说明书 编写人余国鹰编写日期2015/9/10 审核人审核日期
目录 一、康耐视相机具体设置 (3) 1.1软件安装 ......................................................................................................... 错误!未定义书签。 1.2流程编辑 (3) 1.3C ODESYS通信注意事项 (6) 二、相机标定 (7) 2.1相机校准 (7) 2.2绝对坐标实现 (9) 2.3相对坐标实现 (10) 三、示教器示例程序 (11) 3.1绝对坐标实现范例 (11) 3.2相对坐标实现范例 (11) 四、CODESYS逻辑开发 (13) 4.1S OCKET通信开发 (13) 4.2外部点数据处理 (14) 五、细节说明 (17)
康耐视相机操作使用说明书 一、 康耐视相机具体设置 1.1 软件安装 双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。 1.2 流程编辑 1. 设置电脑本地连接IPV4地址为19 2.168.39.12(设置为39段即可)。 2. 双击康耐视In-Sight 浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。 图 1.1 3. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。 图1.2
基于靶标平面相机参数动态标定Matlab程序
基于靶标平面相机参数动态标定Matlab程序 ★注意:直接运行bd.m文件即可进行动态标定,附录Ⅲ中的其它函数文件均会被bd.m文件调用;坐标数据由实验获取。 bd .m %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % M为靶标角点的世界坐标数据,m1—m5为5组图像像素坐标数据;本函数为主函数,它将数据赋值给函数Dtbd(M,m)实现相机动态标定。 clc; clear; M=load('Model.txt'); %Model.txt中为靶标角点的世界坐标,由实验测得 m1=load('data1.txt'); m2=load('data2.txt'); m3=load('data3.txt'); m4=load('data4.txt'); %data1.txt—data5.txt中为不同视角所对应的角点图像坐 %标,可用附录Ⅱ中的程序测得 m5=load('data5.txt');%Model.txt为靶标的世界坐标 M=[M(:,1:2) ; M(:,3:4) ; M(:,5:6) ; M(:,7:8)]; m1=[m1(:,1:2) ; m1(:,3:4) ; m1(:,5:6) ; m1(:,7:8)]; m2=[m2(:,1:2) ; m2(:,3:4) ; m2(:,5:6) ; m2(:,7:8)]; m3=[m3(:,1:2) ; m3(:,3:4) ; m3(:,5:6) ; m3(:,7:8)]; m4=[m4(:,1:2) ; m4(:,3:4) ; m4(:,5:6) ; m4(:,7:8)]; m5=[m5(:,1:2) ; m5(:,3:4) ; m5(:,5:6) ; m5(:,7:8)]; M=M'; % 将靶标平面上角点的世界坐标写入矩阵M中,M为2维矩阵m(:,:,1)=m1'; m(:,:,2)=m2'; m(:,:,3)=m3'; m(:,:,4)=m4'; m(:,:,5)=m5'; % 将5个视角对应的图像像素坐标写入矩阵m中,m为3维矩阵Dtbd(M,m) % 调用Dtbd .m文件进行动态标定%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Dtbd .m %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Dtbd(M,m)函数实现的功能正是本论文中第4章所讲述的动态标定技术,它引入了径向畸变和切向畸变,具体标定过程可参照本论文。 function Dtbd(M,m) [rows,npts]=size(M); matrixone=ones(1,npts); M=[M;matrixone]; num=size(m,3); for i=1:num
快速三维扫描激光雷达的设计及其系统标定
第40卷第12期2006年12月 浙 江 大 学 学 报(工学版) Journal of Zhejiang University (Engineering Science ) Vol.40No.12 Dec.2006 收稿日期:20051005. 浙江大学学报(工学版)网址:https://www.360docs.net/doc/7c7602226.html,/eng 作者简介:项志宇(1973-),男,浙江武义人,博士后,副教授.从事智能机器人及信号处理的研究.E 2mail :xiangzy @https://www.360docs.net/doc/7c7602226.html, 快速三维扫描激光雷达的设计及其系统标定 项志宇 (浙江大学信息科学与工程学院,浙江杭州310027) 摘 要:为了增强传统二维激光雷达的环境几何信息采集能力,设计了一个快速三维扫描激光雷达系统.采用了一个单片机控制的步进电机旋转二维激光雷达的扫描平面,得到第三维扫描.研制了高速数据通讯卡,实现激光雷达与数据采集计算机之间的实时传输.在整个扫描过程中,各个时刻的二维距离测量数据和相应的俯仰扫描角被同时记录下来,形成一帧完整的三维距离图像.在分析系统误差源基础上,对初始姿态误差和系统偏心误差建立了数学模型,并采用最小二乘法作了系统标定.实验结果表明,该雷达系统精度高,在量程范围内距离误差小于±30 mm ,扫描速度可达1.2s/帧数据. 关键词:三维激光雷达;系统设计;参数标定. 中图分类号:TN958 文献标识码:A 文章编号:1008973X (2006)12213004 F ast 3D scanning laser radar system design and calibration XIAN G Zhi 2yu (College of I nf ormation Science and Engineering ,Zhej iang Universit y ,Hangz hou 310027,China ) Abstract :To enhance t he t raditional 2D laser radar ’s capability acquiring geomet ric information of environ 2ment ,a fast 3D scanning laser radar system was designed.The scanning plane of a 2D laser radar was rota 2ted using a micro 2comp uter cont rolled step motor ,and t he t hird dimension scanning was realized.After a high 2speed data t ransmission board was developed ,t he real 2time link between t he laser radar and t he data 2acquiring comp uter was achieved.2D range measurement data and t he corresponding pitching angle at dif 2ferent time were recorded simultaneously during t he scanning process ,and t hen a complete frame of 3D range image was formed.After analyzing t he sources of t he system error ,t he mat hematical model for ini 2tial attit ude error and t he system eccent ric error were set up ,and t he system was calibrated using t he least square met hod.The experimental result s show t hat t he radar system has high data accuracy wit h range er 2ror less t han ±30mm wit hin t he measurement scope ,and has high scanning speed up to 1.2s/f rame.K ey w ords :3D laser radar ,system design ,calibration. 激光测距雷达(laser radar ,L R )以其测距速度快,精度高,获取信息直观等优点在军事、航空和民用等领域得到了越来越多的应用.在智能移动机器人的研究中,激光测距雷达更是和CCD 摄像机、超声传感器等一起成为机器人必不可少的外部环境感知传感器之一[122].目前激光测距雷达主要有二维和三维两种,二维激光雷达只在一个固定的扫描平面上获取距离信息,即单线扫描;三维激光雷达则在二维扫描的同时,还能转动扫描平面,即多线扫描.和 二维激光雷达相比,由于三维激光雷达获取的信息量大得多,因此在包括复杂地形机器人导航、工程测量等领域具有更大的应用价值.不过,由于三维激光雷达的装置复杂度高,价格也比二维激光雷达高出十多倍.高昂的价格限制三维激光雷达的进一步应用.90年代中期我国的陆祖康等人[3]曾以相位法测距原理自主研制三维激光扫描雷达,并在第一代自主机器人应用中获得了良好的效果[4].近年来,为了满足科研和实验的需要,国外有些大学采取了改装
双目立体相机自标定方案的研究
双目立体相机自标定方案的研究 一、双目立体相机自标定原理 双目视觉是通过两个摄像机从不同的角度拍摄同一物体,根据两幅图像重构出物体。双目立体视觉技术首先根据已知信息计算出世界坐标系和图像坐标系的转换关系,即世界坐标系和图像坐标系的透视投影矩阵,将两幅图像上对应空间同一点的像点匹配起来,建立对应点的世界坐标和图像坐标的转换关系方程,通过求解方程的最小二乘解获取空间点的世界坐标系,实现二维图像到三维图像的重构。重构的关键问题是找出世界坐标系和图像坐标系的转换关系--透视投影矩阵。透视投影矩阵包含了图像坐标系和相机坐标系的转换关系,即相机的内参(主要是相机在两坐标轴上的焦距和相机的倾斜角度),以及相机坐标系和世界坐标系的转换关系,即相机的外参(主要是相机坐标系和世界坐标系的平移、旋转量)。相机标定的过程就是确定相机内参和相机外参的过程。 相机自标定是指不需要标定块,仅仅通过图象点之间的对应关系对相机进行标定的过程。相机自标定技术不需要计算出相机的每一项参数,但需要求出这些参数联系后生成的矩阵。二、怎样提高摄像机自标定精确度? 方法一、.提高估算基本矩阵F 传统的相机自标定采用的是kruppa方程,一组图像可以得到两个kruppa方程,在已知3对图像的条件下,就可以算出所有的内参数。在实际应用中,由于求极点具有不稳定性,所以采取基本矩阵F分解的方法来计算。通过矩阵的分解求出两相机的投射投影矩阵,进而实现三维重构。由于在获取图像过程中存在摄像头的畸变,环境干扰等因素,对图像会造成非线性变化,采用最初提出的线性模型计算 f 会产生误差。非线性的基本矩阵估计方法得到提出。近年来非线性矩阵的新发展是通过概率模型降低噪声以提高估算基本矩阵的精度。方法二、分层逐步标定法。 该方法首先对图像做射影重建,再通过绝对二次曲线施加约束,定出仿射参数和摄像机参数。由于它较其他方法具有较好的鲁棒性,所以能提高自标定的精度。 方法三、利用多幅图像之间的直线对应关系的标定法。 方法四、改进优化算法 自标定问题的求解可归结为求解一组非线性多项式方程组的问题,解决这类问题的常用方法是各种优化算法,所以改进优化算法也是提高精度的有效措施。 英文文献 1.题目:A Camera Self-calibration for Machine Vision Based on Kruppa’s Equation(基于机器视觉的相机自标定Kruppa方程) 作者:Zhaosheng Tao, Dawei Tu, Saisai He, Jinjie Ye 出处:Trans Tech Publ 日期:2013年8月 2.题目:Computer vision methods for optical microscopes(计算机视觉光学显微镜的方法) 作者:M. Boissenin, J. Wedekind *, A.N. Selvan, B.P. Amavasai, F. Caparrelli, J.R. Travis 出处:Elsevier 日期:2007年7月
A320系列飞机气象雷达系统
A320系列飞机气象雷达系统介绍及机组操作建议 概述:机载气象雷达系统(WXR)用于在飞行中实时地探测飞机前方航路上的危险气象区域,以选择安全的航路,保障飞行的舒适和安全。机载气象雷达系统可以探测飞机前方的降水、湍流情况,也可以探测飞机前下方的地形情况。在显示器上用不同的颜色来表示降水的密度和地形情况。新型的气象雷达系统还具有预测风切变(PWS)功能,可以探测飞机前方风切变情况,使飞机在起飞、着陆阶段更安全。本文主要针对我公司A320系列飞机机载气象雷达系统的组成、工作原理、显示特点及我公司A320系列飞机气象雷达的种类和机组操作建议进行了介绍。 一、机载气象雷达系统的组成 机载气象雷达系统的基本组成由:雷达收发机、雷达天线、显示器、控制面板和波导系统等,如图1-1所示:
雷达收发机:用来产生发射射频脉冲信号和接收并处理射频回波信号,提供气象、湍流和地形等显示数据,探测风切变事件并向机组发送警告和告诫信息。 雷达天线:用来产生高3.6°、宽3.4°的波束并接收回波信号。天线的稳定性受惯性基准组件(IRU)的俯仰和横滚数据控制。 显示器:对于A319/A320/A321飞机来说,气象雷达数据都显示在ND上。 控制面板:用于选择气象雷达的工作方式,控制天线的俯仰角度和稳定性,对接收机灵敏度进行控制。 波导系统:波导管作为收发机和天线之间射频信号桥梁通道。 二、气象雷达对目标的探测 机载气象雷达主要用来探测飞机前方航路上的气象目标和其他目标的存在以及分布状况,并
将所探测目标的轮廓、雷雨区的强度、方位和距离等显示在显示器上。它是利用电磁波经天线辐射后遇到障碍物被反射回来的原理,目标的导电系数越高,反射面越大,则回波越强。要清楚气象雷达如何工作的关键在于了解雷雨的反射率。一般来说,雷雨的反射率被划分成三个部分:雷雨的下三分之一由于温度在冰点之上,所以全部由小雨滴组成,这部分是雷雨中对雷达波能量反射最强的部分。中间部分由过度冷却的水和冰晶组成,由于冰晶是不良的雷达波反射体,所以这部分的反射率开始减小了。雷雨的上部完全由冰晶组成,所以在雷达上几乎不可见。另外,正在形成的雷雨在其上部可能会形成拱形的紊流波,如图2-1所示:
康耐视视觉入门培训
一、连接相机 1、根据康耐视接线说明书接好相机,通过网线连接上电脑。在PC端打 开in-sight浏览器。 2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹 出“将网络、设备添加到网络”: 查找出7402相机,如上图,其IP地址与PC不在同一个网段。 3、统一ip网段 点击“复制PC网络设置”, 输入125,点击“应用”,则把相机的ip地址设置为 “192.168.0.125”,让相机、pc都处于192.168.0.xxx网段 上。
4、打开相机 双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载 的作业(如pinwen.job)也打开。 “传感器”-》“启动”,设置相机上电后是否自动联机,设置自 动加载的作业。 二、新建作业(电子表格下) 1、转到电子表格视图 2、“文件”-》“新作业”,或者点击左上角相应工具
三、设置拍照参数 双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为 “手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。 四、校准 1、calibrateGrid 将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2: 点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter 键):
点击“触发器”,则右上角现实找出的特征点数(276)。点击下方“校准”按钮: 点击“确定”按钮,则校准完成。 2、CalibrateImage 经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。
【CN110132130A】激光雷达位置标定方法、系统及其数据处理方法、系统【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910163814.X (22)申请日 2019.03.05 (71)申请人 上海宾通智能科技有限公司 地址 200241 上海市闵行区东川路555号乙 楼4085室 (72)发明人 温从标 蒋祖武 (51)Int.Cl. G01B 11/00(2006.01) (54)发明名称激光雷达位置标定方法、系统及其数据处理方法、系统(57)摘要本发明提供了一种激光雷达位置标定方法、系统及其数据处理方法、系统,该数据处理方法,包括:获取测量点云数据,所述测量点云数据是安装于车辆的激光雷达扫描安装于所述车辆的标定件而产生的;所述标定件在水平面的投影与所述车辆在水平面的投影相匹配;所述标定件调整后的高度与所述激光雷达的高度相匹配;根据所述测量点云数据与理论点云数据,确定所述测量点云数据与所述理论点云数据的目标匹配关系;根据所述目标匹配关系,以及标定件位置信息,确定所述激光雷达的雷达位置信息,所述雷达位置信息用于表征所述激光雷达相对于所述AVG中心的位置。本发明在AVG的导引时不会再受到安装时对加工精度、装配容差、人为操作等因 素的影响。权利要求书2页 说明书11页 附图7页CN 110132130 A 2019.08.16 C N 110132130 A
权 利 要 求 书1/2页CN 110132130 A 1.一种激光雷达位置标定的数据处理方法,其特征在于,包括: 获取测量点云数据,所述测量点云数据是安装于车辆的激光雷达扫描安装于所述车辆的标定件而产生的;所述标定件在水平面的投影与所述车辆在水平面的投影相匹配;所述标定件调整后的高度与所述激光雷达的高度相匹配; 根据所述测量点云数据与理论点云数据,确定所述测量点云数据与所述理论点云数据的目标匹配关系;所述目标匹配关系用于表征所述测量点云数据中数据点与所述理论点云数据中数据点的一种空间坐标转换的方式,所述测量点云数据与所述理论点云数据是不同坐标系下的; 根据所述目标匹配关系,以及标定件位置信息,确定所述激光雷达的雷达位置信息,所述标定件位置信息用于表征所述标定件相对于所述车辆的AVG中心的位置,所述雷达位置信息用于表征所述激光雷达相对于所述AVG中心的位置。 2.根据权利要求1所述的方法,其特征在于,所述激光雷达为3D激光雷达,所述测量点云数据与所述理论点云数据为三维的点云数据。 3.根据权利要求2所述的方法,其特征在于,所述根据所述测量点云数据与理论点云数据,确定所述测量点云数据与所述理论点云数据的目标匹配关系,包括: 计算所述测量点云数据中的数据点与所述理论点云数据的数据点的残差; 确定所述残差为最小值时所述测量点云数据与所述理论点云数据间的匹配关系,并以此为所述目标匹配关系。 4.根据权利要求1所述的方法,其特征在于,所述激光雷达为2D激光雷达,所述测量点云数据与所述理论点云数据为二维的点云数据。 5.根据权利要求4所述的方法,其特征在于,所述根据所述测量点云数据与理论点云数据,确定所述测量点云数据与所述理论点云数据的目标匹配关系,包括: 确定所述测量点云数据中数据点所形成的N个测量线段,每个测量线段对应于一个理论线段,所述理论线段是所述理论点云数据中数据点所形成的;其中的N为大于或等于1的整数;所述N个测量线段是连续的; 在同一参考平面中,计算各测量线段中各数据点与对应理论线段中各数据点的距离;并确定所述距离的总和为最小值时所述测量点云数据与所述理论点云数据间的匹配关系,并以此为所述目标匹配关系。 6.根据权利要求5所述的方法,其特征在于,N为3,且三个连续的测量线段对应于四个端点;所述确定所述测量点云数据中数据点所形成的N个测量线段,包括:确定所述测量点云数据中数据点的初始数据点与末尾数据点;所述初始数据点为所述N个测量线段的第一个端点,所述末尾数据点为所述N个测量线段的第四个端点; 在所述测量点云数据中任意取一个参考数据点;所述参考数据点为相距所述初始数据点与末尾数据点的连线最远的至少一个数据点中的其中之一; 计算所述参考数据点与所述初始数据点之间各数据点相距第一参考线的第一间距,并确定所述第一间距为最大值时的数据点为第二个端点;所述第一参考线为连接所述参考数据点与所述初始数据点形成的; 计算所述参考数据点与所述末尾数据点之间各数据点相距第二参考线的第二间距,并确定所述第二间距为最大值时的数据点为第三个端点;所述第二参考线段为连接所述参考 2
车载激光雷达标定的方法与制作流程
一种车载激光雷达标定的方法,属于汽车自动驾驶领域。汽车自动驾驶技术中涉及的多传感器之间的融合技术不足。一种车载激光雷达标定的方法,设置一块标定板,配合安装在车辆上的激光雷达提取标定板的四个角点的步骤;测量四个角点在车体坐标系的物理坐标,结合由激光雷达提取的四个角点计算得到旋转平移矩阵的步骤;对两个激光雷达数据之间的进行坐标转换,拼接多台激光雷达,对激光雷达的标定的步骤。本技术具有精确将自动驾驶车辆之间的多传感器融合的优点。 权利要求书 1.一种车载激光雷达标定的方法,其特征是:所述方法包括: 在自动驾驶车辆前设置一块标定板,配合安装在车辆上的激光雷达提取标定板的四个角点的步骤; 测量四个角点在车体坐标系的物理坐标,结合由激光雷达提取的四个角点计算得到旋转平移矩阵的步骤; 对两个激光雷达数据之间的进行坐标转换,拼接多台激光雷达,实现对激光雷达的标定的步骤。 2.根据权利要求1所述一种车载激光雷达标定的方法,其特征在于:所述的提取标定板的四个角点是指提取激光雷达数据中标定板的四个角点,具体包括以下步骤:
步骤一一、获取点云数据: 将标定板设置于激光雷达前方6~10m的距离处,标定板的板面垂直于地面,用于承接激光雷达的发射信号;所述的标定板为一块2米×2米的正方形木板; 之后,在6~10m的距离之间选取4个距离值分别测量角点数据,得到4组角点数据;所述的角点数据是指在车体坐标系下的XYZ三维数据; 步骤一二、切割标定板所在的点云区域: 首先,将激光雷达向前的方向定义为X轴,将获取的点云数据记录的每个点的三维坐标表示为p(x, y, z); 然后,通过下式计算每个点偏离X轴的角度α和距离激光雷达的距离d; 最后,设定距离X轴的最大角度和最小角度,以及距离激光雷达前方的最大距离和最小距离,在此范围内计算包含标定板在内的点,并对该区域进行筛选,将筛选出的符合条件的点存入新的指针中; 步骤一三、提取标定板: 在切割后的区域内,利用PCL中的RANSAC算法,使用平面参数模型并设置迭代阀值提取标定板的平面; 之后,在提取标定板后,使用参数化方程将标定板投影到其所在平面上;参数化方程为:AX+BY+CZ+D=0,式中,A、B、C表示系数,D为常数,来自RANSAC提取平面后的参
相机标定个人总结
本文是一篇关于相机标定意义和原理的个人总结,包含了OpenCV和Matlab中常用的相机标定函数的注解。 相机标定是机器视觉的基础,标定结果的好坏直接决定了机器视觉的系统精度,作用可见一斑。在这一年半的时间里,我个人也是随着实验和程序的进一步理解,对标定的原理和意义有了更多的想法。同样,由于博文的关系,仍有一些朋友会常常询问标定的程序问题。本人的2010-05-17OpenCV标定程序的问题也多次被朋友询问,由于当时对标定的认识还不够系统,因此现在认为该文对标定的意义和原理有很多误解,并在此推荐一些较好的博文拱大家学习: 双目测距与三维重建的OpenCV实现问题集锦(一)图像获取与单目标定; 双目测距与三维重建的OpenCV实现问题集锦(二)双目标定与双目校正; 双摄像头测距的OpenCV实现; 分享一些OpenCV实现立体视觉的经验; 下面结合本人的毕业论文及一年半来对机器视觉的学习,对相机标定的意义和原理进行叙述。 1.单目相机模型 单目相机模型中的三种坐标系关系如图1所示,相机坐标系即是以光轴中心O为原点的坐标系,其z轴满足右手法则,成像原点 f O所代表平面即为像平面坐标系(实际应用中,均以图像左上角为坐标系原点),实际物体坐标系即为世界坐标系。 光轴中心O 图1 单目相机模型的三坐标系统关系 其中,P在世界坐标系的值为() W W W X,Y,Z,P u 是P在像平面坐标系的投影点,其相机 坐标系的值为(X,Y,Z) u u u 。θ是相机坐标系Z轴与像平面夹角,一般情况下Z轴与像平面垂直,θ值为90。且相机坐标系x y O与像平面 f f f x y O平行,f为相机的焦距。
一种基于2D激光雷达的扫描系统标定方法
激光与红外No.10 2017李媛等变参数激光冲击T C17钛合金疲劳裂纹扩展特性1233 5354 -5362. [10]X D w a n g,Y H L i, Q P L i,et al. Property a n d thermo- stablity study o n T C6titanium alloy nanostructure pro- cessed b y L S P[J]. Transactions of Nanjing University of Aeronautics & Astronautics,2012,29( 1) :69 -76. [11]C R Gonzalez, J L O c a n,G G Rosas,et al. Effect of laser shock processing o n fatigue crack growth a n d fracture toughness of 6061-T6 a l u m i n u m alloy [J]. Materials Sci- ence & Engineering A,2004 ,386 :291 -295. [12]X C Z h a n g,Y K Z h a n g,J Z L u,e t al. I m p r o v e m e n t of fa- tigue life of Ti-6A1^1V alloy b y laser shock peening[ J]. Materials Science &Engineering A, 2010, 527 ( 15 ):3411 -3415. [13]S H u a n g,J Z Z h o u,J S h e n g,et al. Effects of laser energy o n fatigue crack growth properties of 6061-T6 a l u m i n u m alloy subjected to multiple laser peening[J]. Engineering Fracture M e c h a n i c s,2012,99(2013) :87 -100. [14]K D i n g,L Ye. Laser shock peening performance a n d process simulation[ M]. N e w Y o r k:W o o d h e a d,2006. [15]J Z L u,K Y L u o,Y K Z h a n g,et al. Grain refinement of L Y2 a l u m i n u m alloy induced b y ultra-high plastic strain during multiple laser shock processing impacts [J ]. Acta- Materialia,2010,11,3984 -3994.[16]Y X i o n g,T T H e,F Z R e n,e t al. Microstructure Evolution a n d Microhardness of Ultrafine-grained H i g h C a r b o n Steel during Multiple Laser S h o c k Processing[J]. Journal of I- ron a n d Steel R e s e a r c h,2015 ,22( 1) :55 -59. [17]J Z Z h o u,S H u a n g,L D Z u o,e t al. Effects of laser p e e- ning o n residual stresses a n d fatigue crack growth proper- ties of Ti-6A1^1V titanium alloy [J]. Optics a n d Lasers in Engineering. 2014,52 :189 -194. [18]Jeep Schijve. Fatigue of structures a n d materials [M]. W u X ueren, et al Transl. Beijing: Aviation Industry Press, 2014:172 -178. [19]0 Hatamleh. A comprehensive investigation o n the effects of laser a n d shot peening o n fatigue crack growth in fric- tion stir wel d e d A A 2195 joints [J ]. International Journal of Fatigue,2009,31 :974 -988. [20]0 Hatam l e h,J Lyons, R F o rman. Laser a n d shot peening effects o n fatigue crack growth in friction stir welded 7075-T7351a l u m i n u m alloy joints[ J]. International Jour- nal of Fatigue,2007,29:421 -434.
cogne康耐视相机操作使用说明书
康耐视相机操作使用说明书 一、康耐视相机具体设置 1.1软件安装 双击康耐视相机软件,按照步骤一步步安装即可。 1.2流程编辑 1. 设置电脑本地连接IPV4地址为(设置为39段即可)。 2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相 机设备,如下图所示。 图 3. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图所示。 图
4. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程; ?开始单击“开始”中“已连接”,如下图所示,可以进行连接设备、断开设备、刷新、添加等操作。 图 单击“开始”中的“设置图像”,如下图所示。 在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。 图 在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节 ?设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。 在“定位部件”的设置对话框中,如下图所示,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败 图 ?配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图所示。新时达机器人视觉通信采用的TCP/IP通讯方式,单击“TCP/IP”,如下图所示,在“TCP/IP设置”对话框中,“服务器主机名”设为(机器人控制器IP地址),“端口”设置与CodeSys中相同,本例中设为9876,“超时时间”设为15000,“结束符”设为字符串(CR13)。 单击“格式化输出字符串”,进行输出操作,如下图所示。勾选“使用分隔符”,表示在输出之间用逗号分隔符进行隔开,方便进行数据处理操作;单击“添加” 按钮,可以输出很多数据,这里只需要输出4个数据,“失败”、“定位器.X”、“定位器.Y”、“定位器.角度”; 输出数据说明:均为7个字节宽度,除图案.失败是整形外,其它数据均为浮点型,小数点位数为2位。 1)第一位图案.失败:判定符,为0表示采集到特征,拍照成功;为1则拍照失败。 2)第二位图案.定位器.X:输出用户坐标系下的X方向绝对值。 3)第三位图案.定位器.Y:输出用户坐标系下的Y方向绝对值。 4) 第四位图案.定位器.角度:输出用户坐标系下的相对角度。 图 图 图 ?完成在“完成”中单击“保存作业”,则保存当前作业任务中的所有 设置;在“完 成”中单击“运行作业”,则运行当前作业任务。 注意,以上参数设定必须在脱机模式下才能够设置,在联机状态下参数不能设置,与外界设备实时通讯必须在联机模式下;物体旋转一定角度拍照失败,看检测部件是否超过相机视野范围和旋转角度值设置是否合理。 1.3Codesys通信注意事项
halcon单相机标定详细说明
相机标定 1 相机标定基本原理 1.1 相机成像模型 目前大多数相机模型都是基于针孔成像原理建立的,因为针孔成像原理简单,并且能满足建模的要求。除此之外还有基于应用歪斜光线追踪法和近轴光线追踪法的成像模型[1]。针孔成像虽然已经展示出了相机的成像原理,但是由于针孔成像是理想的物理模型,没有考虑相机本身的尺寸、镜头与相机轴心的偏斜等因素的影响,因此精度很低,不能满足工业机器视觉的要求。为了使相机模型能高精度的反应相机的实际成像过程,需要再针孔成像模型的基础上考虑镜头畸变等的因素。 图1 针孔成像 基于针孔成像原理建立的相机的成像模型,如下图所示。在相机的成像模型中,包含有几个坐标系分别是世界坐标系、相机坐标系、图像坐标系,相机的成像过程的数学模型就是目标点在这几个坐标系中的转化过程。 图2 针孔成像模型 (1)世界坐标系(X w,Y w,Z w),就是现实坐标系,是实际物体在现实世界中的数学描述,是一个三维的坐标空间。 (2)摄像机坐标系(X c, Y c),以针孔相机模型的聚焦中心为原点,以摄像机光学轴线为Z c轴 (3)图像坐标系:分为图像像素坐标系和图像物理坐标系 为了便于数学描述将图像平面移动到针孔与世界坐标系之间。如下图所示。
图3 将相机平面移至针孔与目标物体之间后的模型 1.2 坐标系间转换 从世界坐标系到相机坐标系: P(X c ,Y c ,Z c )=R(α,β,γ)?P(X w ,Y w ,Z w )+T 每一个世界坐标的对象都可以通过旋转和平移转移到相机坐标系上。将目标点旋转θ角度,等价于将坐标系方向旋转θ。如下图所示,是二维坐标的旋转变换,对于三维坐标而言,旋转中绕某一个轴旋转,原理实际与二维坐标旋转相同。如果,世界坐标分别绕X ,Y 和Z 轴旋转α,β,γ,那么旋转矩阵分别为R (α),R (β),R (γ) 图4 坐标旋转原理 R (α)=[10 00cosα ?sinα0sinαcosα] (1-1) R (β)=[cosβ 0sinβ0 10?sinβ 0cosβ ] (1-2)
一种双目立体视觉相机标定方法
万方数据
万方数据
第3期李春艳等:一种双目立体视觉相机标定方法?53? 表l相机内参数的稳定性测试结果 表2相机外参数的稳定性测试结果外参数数值/mm外参数数值/(”) AX。0.104579△∞9.36597 △y10.087645△∞17.46691 AZ。0.055662△k2.997428 从表1和表2可看出: ①内方位元素(并。,Y。,f)的稳定性测试结果的RMS较大,对测量精度的影响较大; ②径向畸变参数墨对测量结果的影响不显著; ③主距,的变化超过5pixel,稳定性差,主点位置(‰,Y。)5次实验值的变化不超过1pixel; ④外参数中3个旋转参数(△(£.,△9,zik)稳定性差,而平移参数(zXX。,AY。,AZ。)变化较小,即相机外参数的标定精度主要取决于3个旋转参数的精度. 2.2相机标定精度的验证 为了验证相机标定结果的有效性,将标定后得到的外方位元素和内参数代入式(6),则此时式(6)中只含有物方点坐标未知数,即可用多幅图像前方交会平差方法计算出各个物方点的坐标. 利用标定的相机结果,使用相机对不同距离处的视场内分布的24个空间物方点进行坐标测量.将相机测得的点坐标与经纬仪工业测量系统测得的相应点坐标进行比较,统计其差值即可验算标定结果的有效性"一,详细结果见表3. 由于经纬仪工业测量系统测得的点坐标精度优于0.05mm,因此可将其测得的坐标视为真值,而将相机测得的坐标与经纬仪工业测量系统测得的相应点坐标之差定为测量误差. 表3不同距离处空间点坐标的测量结果 ?注:s。.=√(ax)2+(△y)2+(△z)2 从表3可以看出: ①不同距离处,x方向与,,方向测量精度优于Z方向(即相机摄影方向)测量精度; ②随着相机测量距离的增大,测量精度会降低; ③相机测试空间点坐标的总测量误差取决于点坐标Z方向的测量精度; ③相机在1.5m测量距离处测量精度优于1.332mm,3.5m钡lJ量距离处测量精度优于3.837mm,6m测量距离处测量精度优于7.147mm,9m测量距离处测量精度优于21.227mm. 2.3极线误差分析 在月球车导航控制系统中,两个相机是固定在一个定长的基线上进行工作的,在工作过程中相机的相对位置和姿态不发生变化,因此利用两相机的外参数可将相机拍摄的图像沿极线方向进行重复采样,生成消除上下视差后的极线图像∞1. 图2为左右相机拍摄的标志点原始图像,对左、右图像进行极线校正,最终可生成消除上下视差后的极线图像.比较左右极线图像中对应的同名点坐标,可得到极线校正误差曲线。如图3所示. 图2左右相机原始图像 万方数据
吕小斌相机内部参数标定装置设计正
第一章前言 1.1 课题背景 相机内参数标定作为实现机械视觉测量的首要环节,机械视觉在各类检验、工业自动化生产线、视觉导航、3D四轮定位等多个领域得到广泛应用。高精度的相机标定能获得高精度的机器视觉测量。相机标定确定相机模型是参数的过程,参数主要是内部参数,内部参数是相机本身固有的与光、电以及几何结构有关的参数。本论文的主要目的就是对相机内参数的标定装置进行设计与计算,确定相机在不同的机构作用下所能完成的功能,同时提高相机内部参数的标定精度。相机内参数标定从视觉数目方面进行分类,主要有三种主要类型:单目视觉、双目视觉和多视角视觉,从标定方法方面进行分类,主要有传统标定法和创新标定法,不同的方法对应不同的相机模型,相机模型大多可以分为以下两中类型,线性模型和非线性模型。日常生活中所见到的针孔模型为线性模型,是研究者在基于光学成像原理上的进行抽象表达之后的成果。因为相机前镜头在生产过程和安装时,会产生一定程度的变形,这种变形被称为相机畸变。所以线性模型在没有精益的制造技术和高精密的安装技术下很难展现相机成像原理。研究者为了更进一步展现相机的成像原理过程,把相机镜头畸变纳入研究的范围中。相机镜头畸变对相机内参数标定精度有着不可轻视的影响,此外,相机内参数标定的精度还取决于标定方法、标靶的表面制造精度、提取图像特征点坐标的精度等多个因数。现在世界上对相机内参数标定的方法研究方向主要有一下几大方向, 1)标定速度 2)简单的实验环境 3)价格低廉的实验器材以及较高的标定精度。因此确定精确的相机模型以及减少各因素对标定参数精度的影响,构成了相机内参数标定研究的主要内容。 本论文主要研究内容就是采用一种简单方便的方法确定相机的位姿关系;然后对DLT标定法、Tsai两步法以及基于平面靶标标定的张正友法进行研究,再设计装置来对这些标定方法进行试验,最终确定最好的标定方法。 1.2国内外研究现状 人类大多数是通过视觉来获取外界信息,视觉信息量巨大,体现了人类视觉功能的重要性。随着信息技术发展,人们通过计算机等实验器材来实现人类的视觉功能,同时,对机器视觉的要求也越来越高。自20世纪50年代以来,虽然还未实现使相机视觉领域像人类等生物那样灵活、高效和通用的视觉,但现有的视觉理论和技术不断的得到提高和发展,这使得人类正逐步的逼近梦想,实现梦想。 20世纪50年代到60年代,机器视觉从二维图像的分析到三维场景为目的的三维视觉研究。期间,B.allert H在1966年首次将最小二乘法引用到相机标定中,并应用在立体坐标测量仪中。到70年代,出现一些视觉应用系统。1971年,del A b和rara K a提出
机载气象雷达天线控制系统
龙源期刊网 https://www.360docs.net/doc/7c7602226.html, 机载气象雷达天线控制系统 作者:方智觅 来源:《科技视界》2015年第34期 【摘要】机载气象雷达天线控制系统是机载气象雷达的重要组成部分,用来控制天线的 运动,是飞机进行气象目标和地形探测的前提。机载气象雷达天线控制系统是自动控制技术在雷达中具体应用的产物,它涉及多方面的技术知识。 【关键词】天线控制;步进电机;光电脉冲发生器 随着航空技术的不断发展,人们对飞机的要求也越来越高,这促进了雷达技术的不断发展。机载气象雷达是雷达的一种,民用机载气象雷达的应用与发展则为飞行的安全性提供了可靠的保障。目前,具有风切变预警功能的机载气象雷达在民航飞机上的重要作用不可低估,已成为民航飞机必不可或缺的重要电子设备。机载气象雷达除了可以探测航路上的危险气象区域外,还可以用于观察地形并实现其他一些功能。现代机载气象雷达可实现的功能有以下几个方面: (1)探测航路前方扇形区域中的降雨区、冰雹区等气象区域; (2)探测夹带着雨粒的湍流区域; (3)观察飞机前下方的地形; (4)发现航路上的山峰等障碍物; (5)显示由其他系统输入的文字或图形信息; (6)用作雷达导航信标。 气象雷达天线是一种方向性很强的X波段微波天线。气象雷达发射机与接收机通过收发 转换开关通过天线实现雷达信号的辐射与回波信号的接收。在发射脉冲持续期内,气象雷达天线将发射机所产生的射频脉冲信号会聚成能量高度集中的雷达波束辐射到空中,在脉冲间隙期内(接收期内),目标所形成的反射回波由天线接收,输送给雷达接收机。 为了探测飞机前方广阔的扇形区域中的气象目标或观测飞机前方广阔的扇形区域中的气象目标或观测飞机前下方的地形,天线在辐射和接收雷达信号的同时,进行着往返的方位扫掠运动。与此同时,天线还必须根据飞机俯仰姿态和倾斜姿态的实时变化,自动地进行相对于飞机机身平面的俯仰修正运动,以保持天线扫掠平面的稳定。此外,还可在一定范围内对天线进行俯仰调节。为了实现雷达系统对天线运动及姿态的控制,天线组中除了用以辐射雷达信号的天