《大气污染控制工程》课程设计
本科《大气污染控制工程》课程设计
说明书
大气污染控制课程设计
一、设计任务
广东九江俊业家具厂生产时会进行喷漆流程,喷漆时,作业场所有大量的漆雾产生,而且苯浓度相当高,对喷漆工人危害极大,如果没有经过处理直接排放,对车间及厂区周边环境造成严重的影响。
为了改善车间及周边区域大气环境状况,受实木家具厂委托,对喷漆车间在生产过程中产生的含苯类有机废气进行整套废气净化系统的设计,使得上述车间排放含有VOC的气体经净化处理后达标排放,减少其对周围环境的污染,提高企业的环保形象。
二、公司资料
?生产工艺
家具喷漆工艺主要包括基材破坏处理、素材处理、整体着色、填充剂、底漆、吐纳、着色、修色、二度底漆、画漆、抛光打蜡等工艺。主要采用的是水帘机喷漆方法。
而在喷漆工艺中,喷漆时涂料溶剂从涂料中挥发出来,形成油漆工艺最主要的污染物——“漆雾”的主要成分之一。家具喷漆中一般采用含苯烃类溶剂,苯为剧毒溶剂,少量吸入也会对人体造成长期的损害。
?废气特点
废气排放量:17640m3/h,
废气组分为苯类有机物(苯、甲苯、二甲苯等)及少量醛类和醇类有机物,
有机物浓度日平均值:2000 mg/m3,
废气温度:当地气温
?气象资料
气温:
年平均气温:22.2oC
冬季:13.5oC
夏季:29.1oC
大气压力:
冬季 740mmHg(98.6×103Pa)
夏季 718 mmHg(95.72×103Pa)
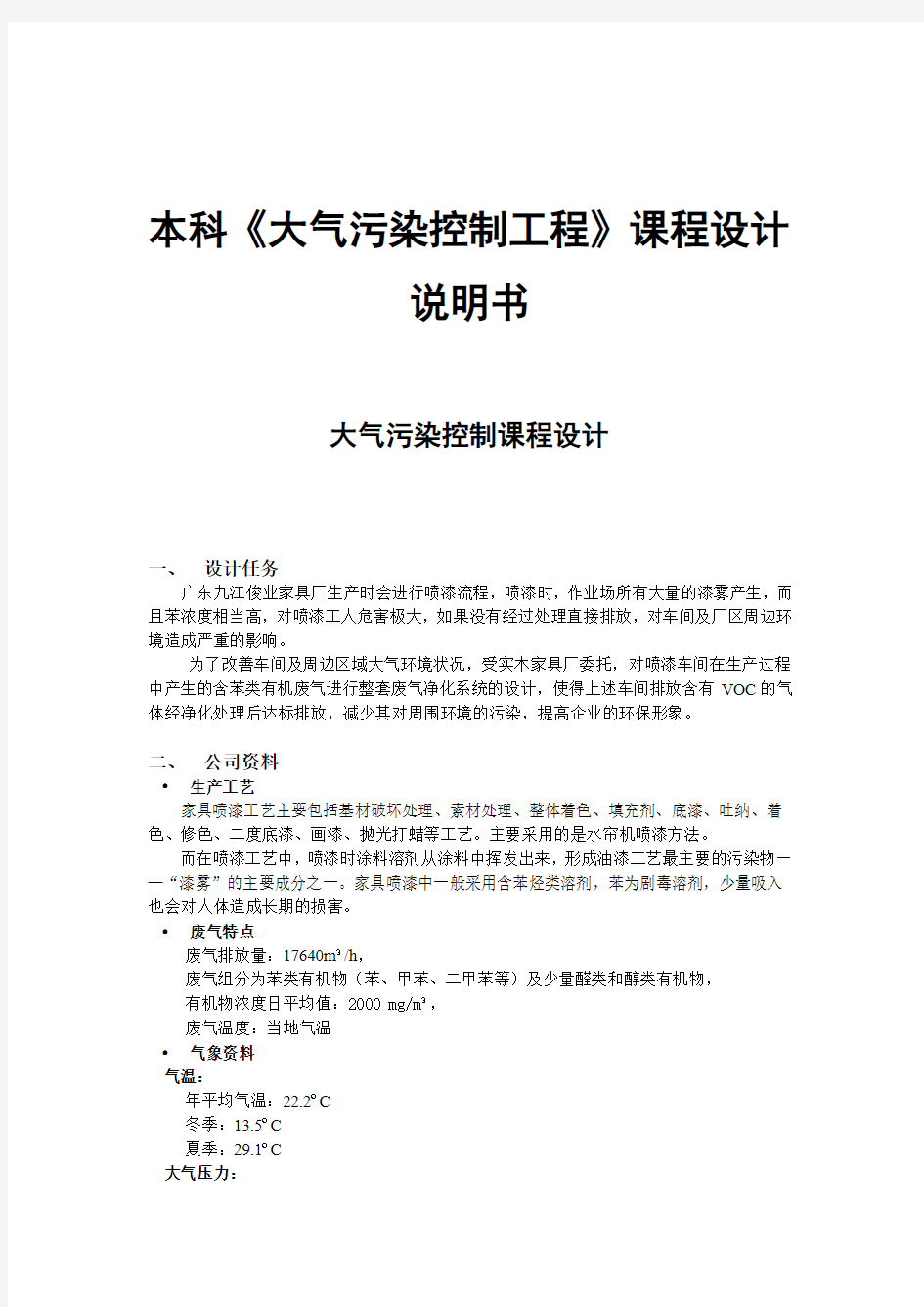
?喷漆室布置图
?
三、设计原则
(1)综合考虑采用先进工艺、技术、设备、材料、投资经济性等因素,以较少的投资,取得较大的社会、环境和经济效益;
(2)采用技术成熟、先进可靠的工艺和处理效果好的设备,确保环保设施运行正常;
(3)按现有场地条件考虑设计,整个工程做到布局合理、占地空间小、外形结构美观、投资小等几项特点;
(4)以设备为主,工艺简单合理,设备使用寿命长,维护简单、方便;并且处理效果稳定,确保处理后废气达到国家环保标准排放。
四、 设计要求
减少该建设项目对附近环境的影响,在正常生产工作状况下,由生产工艺流程中产生的废气污染物经净化处理后,排放污染物的排放浓度能满足达到《中华人民共和国大气污染物综合排放标准》(GB16297-2001)中的第二时段排放要求,详见下表1:
五、 确定净化方案
家具喷漆车间废气以VOCs 污染为主,处理喷漆废气技术常用的有以下几种:
1. 低温冷凝法
冷凝法利用物质在不同温度下具有不同饱和蒸汽压这一性质,采用降低温度、提高系统的压力的方法使处于蒸汽状态的污染物冷凝并与废气分离[1]
。该法特别适用于处理废气体积分数在210 以上的有机废气。一般典型的带制冷的冷凝系统工艺流程如图1。
图 3冷凝系统流程
在对喷漆车间有机废气处理过程中,低温冷凝法虽是最简单的回收技术,但利用此方法离开冷凝器的VOCs 仍具有较高的浓度,不能满足环境排放标准。要获得高的回收率,系统
净化气体
需要很高的压力和很低的温度设备,费用显著地增加。
2. 燃烧法
燃烧法是氧化有机物最为剧烈的方法,一般喷漆行业所排出的有机废气广泛采用燃烧法治理。在燃烧过程中有机物质剧烈氧化,放出大量的热能,可以回收利用。燃烧法一般包括直接燃烧法和催化燃烧法。
直接燃烧法主要用于高浓度VOCs 废气的净化。燃烧温度控制在1100℃以上,去除效率达95%以上。对于低浓度有机废气采用燃烧法来处理还需加入辅助燃料,其处理效率可达到 99%。
催化燃烧法是在催化剂作用下,使有机废气在200~400℃温度下氧化成二氧化碳和水,同时发出燃烧热,常用的催化剂有铂、钯贵金属和非贵金属氧化物[2],预热能源可用煤气、煤油等。
处理有机废气的浓度越高越有利。图 4为典型的催化燃烧系统图。
图 4典型燃烧系统示意(其中稀释空气视情况加入)
此法适于高浓度、小风量的喷漆废气的净化。缺点是表面异物附着易使催化剂中毒失效,且催化剂和设备价格较贵。
3. 溶剂吸收法
吸收法是用来去除、净化混合气体的最重要的方法之一。用溶剂、溶液或清水吸收有害气体,使其与废气分离的方法即称为溶剂吸收法,吸收剂不同可吸收不同的有害气体。
废气由吸收塔底进入塔内,作为吸收剂的水从吸收塔上部进入并被分散。在气体由下而上和液体从上至下的接触过程中,废气中有害溶剂气体被水吸收,使废气得到净化。净化后气体由吸收塔上部排出,而含有废气的水由塔底排出并流入水槽。需对产生的废水作二次处理[3]。
助燃空气
辅助燃料
烟道
采用油来吸收喷漆室中的溶剂,让废气通过5个喷油的吸附室,使废气与油充分接触,将有机溶剂吸收。含溶剂的油经过分馏处理后可再利用,经处理的的废气排入大气中。
4.活性炭吸附法
吸附法[4]是目前广泛使用于喷漆车间有机废气的处理,其原理是利用吸附剂的多孔结构,将废气中的VOCs 捕获,废气得到净化从而可以排放到大气中。吸附技术主要用于废气中组分比较简单、有机物回收利用价值较高的情况,活性炭则由于具有巨大的比表面积、吸附容量大、易再生、来源丰富且价格较低等优点,故成为最常用的吸附剂[5]。活性炭吸附在处理喷漆车间VOCs过程上是一项成熟的工业技术。
表 2 列出了各种常见方法的处理效果、优缺点等做了较为详细的比较。
目前大部分工厂在处理喷漆废气时采用水帘洗涤装置或颗粒碳吸附法,水帘洗涤法处理后的喷漆废气一般达不到《大气污染物排放标准》GB16297- 96中的标准。颗粒碳吸附法一般未采取再生措施,设施运行一定时间后需更换新炭,因此运行成本较高[6-8]。
针对喷漆废气的特点,并结合工厂现状,认为采取吸附-催化燃烧法来处理“三苯”等有机废气比较合理,由于喷漆废气经水幕机洗涤后仍具有粘性并含有一定的水分,因此在吸附床前应增加预处理部分以除去漆物和水分,见图5。
本废气净化处理系统采用双气路连续工作,一个催化燃烧床,两个吸附器交替使用。由于离心风机的抽吸作用,在收集管道、沉降式离心除湿器、活性炭吸附器内形成负压,废气通过管道进入沉降式离心除湿器中,除去水帘机喷漆废气中的水分和漆雾颗粒,再将有机废气用新型的活性炭吸附剂吸附,当快达到饱和时停止吸附,然后用热气流将有机物从活性炭上脱附下来使活性炭再生;脱附下来的有机物已被浓缩并送往催化燃烧床催化燃烧成二氧化碳及水蒸气排出。当有机废气的浓度达到2000PPm以上时,有机废气在催化床可维持自燃,不用外加热。燃烧后的尾气一部分排入大气,大部分被送往吸附床,用于活性炭再生。这样可满足燃烧和吸附所需的热能,达到节能的目的。再生后的活性炭可进入下次吸附;在脱附时,净化操作可用另一个吸附器进行。
六、主要设备设计
1.送风系统设计
由喷漆室布置图可知,该项目废气主要来源于水帘式喷漆机产生的喷漆废气,根据资料计算喷漆废气风量如下:
水帘式喷漆机工作时废气从喷漆车间下方和喷漆废水一起进入水帘式喷漆机的收集系统。废水从地下管道输送到污水处理厂,废气通过排气管道( 1000mm)排出。
喷漆室体积(长×宽×高)为:5.25×5.0×2.8=73.5m3.按每小时换气200次计算,则通风量为:L=73.5×200=14700m3/h,设计风量为15000m3/h。
故采用一台3kw的离心风机送风。
风阻核算
为了保证设备的正常运行,设备及管道压降和需小于风机风压。沉降式离心除湿器压降
取800Pa,活性炭吸附器的压降区600Pa,每米管道按15Pa计算,最远点距离为10m。计算该系统的风阻:
P1=P(沉降式离心除湿器)+P(活性炭吸附器)+P(管道)=800+600+10×15=1550Pa 现选1台风机,设备正压为风机最大风压,风机的最大风压力为1550Pa。
P2=P(风机)=1578Pa
设备风压总计:
P=P2-P1=1578-1550=28Pa
根据压力平衡原理,废气治理设施内部呈现负压,使废气形成有向运动。28Pa>0,符合要求。
2.脱水装置
脱水装置为沉降式离心除湿器,规格尺寸:直径为1000mm,高为1800mm。
3.HAC活性炭吸附器
净化系统共有两个吸附器,吸附材料选用HAC活性炭吸附剂。HAC是由一定配比的吸附剂材料和粘接剂组成,经过一定的制备工艺形成独特的蜂窝状活性炭构造的吸附材料。
吸附器有十层过滤层,每层为40mm的活性炭吸附层,均为Z×15活性炭(直径为1.5mm 左右)。
4.催化燃烧床
催化燃烧床采用蜂窝陶瓷状为载体的贵金属催化剂,催化床内设电加热装置,在催化剂作用下,起燃温度为300℃左右,一部分尾气返回吸附器进行脱附处理。
七、主要设备选型
1.收集总管道
规格:Φ500mm
数量:5m
2.管道配件
数量:1批
3.沉降式离心除湿器
规格:Φ1000×H1800mm
空机气速:4m/s
压损:600-800Pa
设备厚度:2.5mm
数量:1台
4.HAC活性炭吸附器
规格:Φ1200×H2000mm
气速:1m/s
压损:400-600Pa
活性炭层高:40mm
数量:2台
5.热交换器
规格:Φ1200×H4000mm
数量:1个
6.催化燃烧床
规格:Φ1200×H3000mm
内置式加热器功率:2kw
数量:1个
7.离心风机
型号:4-72NO3.6A
风量:2664m3/h
全压:1578Pa
功率:3kw
数量:5台
8.风机连接管道及配件
规格:Φ400mm及Φ200mm
数量:1批
9.配电箱
数量:1个
10.配电系统
数量:1批
11.五金配件
数量:1批
八、电气控制系统设计
1.设计范围
包括废气处理站界区内的抵押配电、自动控制系统。
2.电源及用电负荷
废气处理站设一路供电电源,由甲方提供:380/220V,50Hz,配电系统采用三相五线制、单相三线制,接地保护系统为TN-S系统。
3.电缆及铺设
型,控制电缆选用KVV型及KVVP型,铺设方式采用电力电缆选用VV型及VV
22
室外电线槽。外部进线电缆共一条接至电柜中。
4.防雷接地
采用避雷带、避雷短针对建筑物作防雷保护。利用天然接地体加上人工接地极作为接地极,工作接地及保护接地共用一套接地极。
5.控制设计
离心风机与脱附风机、补冷风机进行反向联动,离心风机启动时脱附风机和补冷风机停止运行,当检测器检测活性炭吸附器饱和吸附时,离心风机停止运行脱附风机和补冷风机启动。
九、人员编制
参照建设部《城市建设各行业编制定员试行标准》,并结合本项目的具体情况。废气处理站主要人员编制如下:技术操作人员1人
十、运行费用
1.运行耗电
2.设备运行费用
每度电计:0.8元,电机有效利用率0.86,每天耗电费用:
116.4×0.86×0.8=80.1元/天
3.药剂费用
药剂费用为:2元/天
十一、设计图纸
图纸见附图。
十二、参考文献
[1] 马广大. 大气污染控制工程[M]. 北京中国环境科学出版社 2002.
[2] 张春菊, 叶代启, 吴军良. 先进实用挥发性有机废气吸附与催化净化技术[J]. 能源环境保护, 2005, 19 (4): 5 - 8.
[3] 郑顺兴. 涂装车间废气的治理[J]. 涂料工业 2006, 36(10): 32 - 35.
[4] DAS D, GAUR V, VERMA N. Removal of volatile organiccompound by activated carbon fiber [J]. Carbon, 2004, 42:2 946 - 2962.
[5] 刘晖, 孙彦富, 苏建华, 等. 利用吸附-催化燃烧法处理喷漆产生的有机气体 [J]. 广州化工 2009, 37 (1): 112 -117.
[6] 切雷米西诺夫, 杨. 大气污染控制设计手册[M]. 北京:化学工业出版社, 1984.
[7] YEN- HSING KIANG. 有害废物处理技术[M]. 北京:中国环境科学出版社, 1993.
[8] 江熊. 工业防毒技术[M]. 北京:化学工业出版社, 1982.
基于某PLC的立体车库控制系统设计
PLC实训设计任务书 一.实训的主要容 根据实际要求,以S7-200型PLC为核心,设计立体车库控制系统。设计控制系统硬件电路,编写软件控制系统程序,目的是掌握PLC控制的基本原理、直流电机、传感器等器件的原理及使用。 二.实训报告任务 车库模型以205实验室的立体车库模型为准 立体停车库实物教学实验装置的主要结构分为控制柜和停车库模型两部分。 控制柜部分由按键显示板、信号接口板电气 控制板几部分组成停车库模型部分由停车层模型和停车盘模型组成。 停车层分为上中下三层上层有四个车位共有四个车盘可停放四辆汽车 模型从左到右分别是1号位2号位3号位4号位简记符为3-1、3-2、 3-3、3-4中层有四个车位共有三个车盘可停放三辆汽车模型从左到右 分别是2-1车盘2-2车盘2-3车盘下层有四个车位共有三个车盘可停 放三辆汽车模型从左到右分别是1-1车盘1-2车盘1-3车盘。 对立体车库的控制可以有两种方法 第一种是由现场操作人员通过相应的按钮控制立体车库设备的动作 第二种是根据实际的生产工艺要求编制出控制程序按照现场要求来控制 立体车库设备的动作。 按下存车按钮选择存车位置。如果选择的车位上已有车停放将发出警示信 息。该警示信息可以通过控制系统点亮警示灯或发出警示声来实现。如果选择的 车位上无车系统将做如下动作 如果选择存放1-1号车位汽车进入车库。当检测到光电开关的信号后表 明车辆己经进库。如果选择存放1-2号车位载车盘1-1右移载车盘1-2下移 到第一层汽车进入车库。1-2号车位上移到第二层原位停止。 按下取车按钮选择取车位置。如果选择的车位上没有车停放将发出警示信 息。如果选择的车位上有车系统将做如下动作 如果选择取1-1号车位的车此时车辆可以离开车库。当检测到限位开关的 信号后表明车辆已经出库车位1-1车辆出库过程完成。如果选择取1-2号车 位的车载车盘1-1右移载车盘1-2下移到第一层汽车出库。车位1-2车辆 出库过程完成上移回原位车位1-2车辆出库过程完成。
汇编语言课程设计
沈阳大学
2.3 MASM的介绍 MASM是微软公司开发的汇编开发环境,拥有可视化的开发界面,使开发人员不必再使用DOS环境进行汇编的开发,编译速度快,支持80x86汇编以及Win32Asm是Windows下开发汇编的利器。它与windows平台的磨合程度非常好,但是在其他平台上就有所限制,使用MASM的开发人员必须在windows下进行开发,历经二三十年的发展,目前MASM的版本已升至6.15,支持MMX Pentium、Pentium II、Pentium III及Pentium 4等指令系统。 2.4总体设计功能 本次课程设计的内容是采用汇编语言设计一个运行于计算机的“霓虹灯”的模拟显示 程序,由$及*字符相间,从两侧向中间螺旋汇聚直至形成一个矩形,这就要求该霓虹灯能够动态地进行变化;霓虹灯模拟显示程序主要是进行程序循环调用,可以通过CMP、JMP、JZ、RET等命令进行跳转。由于是霓虹灯的模拟显示,因此在进行程序循环调用前需要进行数据段定义,以使子程序在进行调用时能够根据数据段的定义来执行,最后显示结果。 定时器中断处理程序:计数器中断的次数记录在计数单元count中,由于定时中断的引发速率是每秒18.2次,即计数一次为55ms,当count计数值为18时,sec计数单元加一(为1秒)。 视频显示程序设计:一般由DOS 或BIOS调用来完成。有关显示输出的DOS功能调用不多,而BIOS调用的功能很强,主要包括设置显示方式、光标大小和位置、设置调色板号、显示字符、显示图形等。用INT 10H中断即可建立某种显示方式。用DOS功能调用显示技术,把系统功能调用号送至AH,把程序段规定的入口参数,送至指定的寄存器,然后由中断指令INT 21H来实现调用。 键盘扫描程序设计:利用DOS系统功能调用的01号功能,接受从键盘输入的字符到AL寄存器,以及检测键盘状态,有无输入,并检测输入各值。 2.5详细功能设计 2.5.1主程序功能 主程序通过调用各个子程序来实现清屏,改变图形等功能,具体调用过程如图1所示。 沈阳大学
微机原理课程设计电压报警器实验报告
南通大学电子信息学院 微机原理课程设计 报告书 课题名: 班级: 姓名: 学号: 指导老师: 日期: xxx
目录 1.设计目的 (2) 2.设计内容 (2) 3.设计要求 (2) 4.设计原理 (3) 5.硬件电路图 (3) 6.程序代码 (5) 7.程序及硬件系统调试情况 (19) 8.设计总结与体会 (19)
一、设计目的 课程设计是培养和锻炼学生在学习完本门课后综合应用所学理论知识,解决实际工程设计和应用问题的能力的重要教学环节。它具有动手、动脑和理论联系实际的特点,是培养在校工科大学生理论联系实际、敢于动手、善于动手和独立自主解决设计实践中遇到的各种问题能力的一个重要教学环节。 通过课程设计,要求学生熟悉和掌握微机系统的软件、硬件设计的方法、设计步骤,使学生得到微机开发应用方面的初步训练。让学生独立或集体讨论设计题目的总体设计方案、编程、软件硬件调试、编写设计报告等问题,真正做到理论联系实际,提高动手能力和分析问题、解决问题的能力,实现由学习知识到应用知识的初步过渡。通过本次课程设计使学生熟练掌握微机系统与接口扩展电路的设计方法,熟练应用8086汇编语言编写应用程序和实际设计中的硬软件调试方法和步骤,熟悉微机系统的硬软件开发工具的使用方法。 通过课程设计实践,不仅要培养学生事实求是和严肃认真的工作态度,培养学生的实际动手能力,检验学生对本门课学习的情况,更要培养学生在实际的工程设计中查阅资料,撰写设计报告表达设计思想和结果的能力。 二、设计内容 设计一个电压报警器,要求采集实验箱提供的0~5V的电压,当输入电压在3V以内,显示电压值,如2.42。当输入电压超过3V,显示ERR,并报警。电压值可在七段数码管显示,点阵广告屏显示或液晶屏显示。报警形式自行设计,
郝吉明第三版大气污染控制工程课后答案完整版
大气污染控制工程 课后答案 (第三版)主编:郝吉明马广大王书肖 目录 第一章概论 第二章燃烧与大气污染 第三章大气污染气象学 第四章大气扩散浓度估算模式 第五章颗粒污染物控制技术基础 第六章除尘装置 第七章气态污染物控制技术基础 第八章硫氧化物的污染控制 第九章固定源氮氧化物污染控制 第十章挥发性有机物污染控制 第十一章城市机动车污染控制
第一章 概 论 1.1 干结空气中N 2、O 2、Ar 和CO 2气体所占的质量百分数是多少? 解:按1mol 干空气计算,空气中各组分摩尔比即体积比,故n N2=0.781mol ,n O2=0.209mol ,n Ar =0.00934mol ,n CO2=0.00033mol 。质量百分数为 %51.75%100197.2801.28781.0%2=???= N ,%08.23%100197.2800 .32209.0%2=???=O ; % 29.1%1001 97.2894 .3900934.0%=???=Ar ,%05.0%100197.2801 .4400033.0%2=???=CO 。 1.2 根据我国的《环境空气质量标准》的二级标准,求出SO 2、NO 2、CO 三种污染物日平均浓度限值的体积分数。 解:由我国《环境空气质量标准》二级标准查得三种污染物日平均浓度限值如下: SO2:0.15mg/m 3,NO2:0.12mg/m 3,CO :4.00mg/m 3。按标准状态下1m 3 干空气计算,其摩尔数为mol 643.444 .221013 =?。故三种污染物体积百分数分别为:
SO 2: ppm 052.0643.44641015.03=??-,NO 2:ppm 058.0643.44461012.03 =??- CO : ppm 20.3643 .44281000.43 =??-。 1.3 CCl 4气体与空气混合成体积分数为1.50×10-4的混合气体,在管道中流动的流量为10m 3N 、/s ,试确定:1)CCl 4在混合气体中的质量浓度ρ(g/m 3N )和摩尔浓度c (mol/m 3N );2)每天流经管道的CCl 4质量是多少千克? 解:1)ρ(g/m 3 N )3 3 4/031.110 4.221541050.1N m g =???=-- c (mol/m 3 N )3 33 4/1070.610 4.221050.1N m mol ---?=??=。 2)每天流经管道的CCl 4质量为1.031×10×3600×24×10-3kg=891kg 1.4 成人每次吸入的空气量平均为500cm 3,假若每分钟呼吸15次,空气中颗粒物的浓度为200g μ/m 3,试计算每小时沉积于肺泡内的颗粒物质量。已知该颗粒物在肺泡中的沉降系数为0.12。 解:每小时沉积量200×(500×15×60×10-6)×0.12g μ=10.8g μ 1.5 设人体肺中的气体含CO 为2.2×10-4,平均含氧量为19.5%。如果这种浓度保持不变,求COHb 浓度最终将达到饱和水平的百分率。 解:由《大气污染控制工程》P14 (1-1),取M=210 2369.0105.19102.22102 4 22=???==--∝O p p M Hb O COHb ,
基于PLC的立体车库控制系统设计
PLC实训设计任务书 12343-1、3-2、3-3、3-4 分别是2-12-22-3 1-11-21-3车盘。 第一种是由现场操作人员通 如果选择存放1-1 明车辆己经进库。如果选择存放1-21-11-2下移 1-2号车位上移到第二层原位停止。 如果选择取1-1 1-1车辆出库过程完成。如果选择取1-2号车1-11-21-2车辆 1-2车辆出库过程完成。
摘要 立体车库是专门实现各种车辆的自动停放及科学寄存的仓储设施。随着城市汽车保有量的不断增加,停车难问题己经成为大中型城市的一个普遍现象。机械式立体车库可充分利用上地资源,发挥空间优势,最大限度地停放车辆,成为解决城市静态交通问题的重要途径。本课题以较为典型的升降横移式立体车库为研究对象,综合考虑立体车库制造成本和运行效率的双重因素。 本文在对国内外车库现状及发展趋势做了充分调研的基础上,选择四层三列式车库结构为研究模型。升降横移式立体车库就其组成部分而言,可分为三大部分:车库结构部分、传动机构部分和控制系统部分。本文简单介绍了车库的主体结构和特点,对车库的控制系统也作了简单的说明。在对升降横移式立体车库控制系统的设计中,采用了先进的可编程序控制器(PLC)控制,运用西门子公司的编程软件编制了升降横移式立体车库控制系统的程序,并经调试、运行,证明采用PLC作为控制系统简单易行。其稳定、可靠、快速、性价比高的特点使得控制系统非常完美。为了使停车设备满足使用要求,根据国家关于机械式停车设备通用安全要求的标准、升降横移式立体车库的实际,在升降横移式立体车库中使用了一些必要的安全技术,这样保证了车辆的绝对安全,使得整个车库可以安全平稳的运行。 关键词:立体车库;控制系统;可编程序控制器
汇编语言-课程设计1
) 汇编语言课程实验报告 实验名称 课程设计1 实验环境 硬件平台:Intel Core i5-3210M 操作系统:DOSBox in Windows 软件工具:Turbo C , Debug, MASM 实验内容 《 将实验7中的Power idea公司的数据按照下图所示的格式在屏幕上显示出来。 实验步骤 1.要完成这个实验,首先我们需要编写三个子程序。第一个子程序是可以显示字符串到屏 幕的程序,其汇编代码如下: ;名称:show_str
;功能:在屏幕的指定位置,用指定颜色,显示一个用0结尾的字符串 ;参数:(dh)=行号,(dl)=列号(取值范围0~80),(cl)=颜色,ds:si:该字符串的首地址 ;返回:显示在屏幕上 ¥ show_str: push ax push cx push dx push es push si push di mov ax,0b800h - mov es,ax mov al,160 mul dh add dl,dl mov dh,0 add ax,dx mov di,ax mov ah,cl . show_str_x: mov cl,ds:[si] mov ch,0 jcxz show_str_f mov al,cl mov es:[di],ax inc si inc di 【 inc di jmp show_str_x show_str_f: pop di pop si pop es pop dx pop cx } pop ax ret 2.第二个程序是将word型数据转换为字符串,这样我们才能调用第一个程序将其打印出
微机原理课程设计报告交通灯
WORD格式微机原理课程设计 设计题目交通灯的设计 实验课程名称微机原理 姓名王培培 学号080309069 专业09自动化班级2 指导教师张朝龙 开课学期2011至2012学年上学期
一、实验设计方案 实验名称:交通灯的设计实验时间:2011/12/23 小组合作:是□否?小组成员:无 1、实验目的: 分析实际的十字路口交通灯的亮灭过程,用实验箱上的8255实现交通灯的控制。(红,黄,绿三色灯) 2、实验设备及材料: 微机原理和接口技术实验室的实验箱和电脑设备等。 3、理论依据: 此设计是通过并行接口芯片8255A和8086计算机的硬件连接,以及通过8253延时的方法,来实现十字路口交通灯的模拟控制。 如硬件连接图所示(在后),红灯(RLED),黄灯(YLEDD)和绿灯(GLED)分别接在8255 的A,B,C口的低四位端口,PA0,PA1,PA2,PA3分别接1,2,3,4(南东北西)路口的红灯,B,C口类推。8086工作在最小模式,低八位端口AD0~AD7接到8255和8253的D0~D7,AD8~AD15通过地址锁存器8282,接到三八译码器,译码后分别连到8255和8253的CS片选端。8253的 三个门控端接+5V,CLOCK0接由分频器产生的1MHZ的时钟脉冲,OUT0接到CLOCK1和CLOCK,2 OUT1接到8086的AD18,8086通过检测此端口是否有高电平来判断是否30s定时到。OUT2产生 1MHZ方波通过或门和8255的B口共同控制黄灯的闪烁。8255三个口全部工作在方式0既基本 输入输出方式,红绿灯的转换由软件编程实现。
4、实验方法步骤及注意事项: ○1设计思路 红,黄,绿灯可分别接在8255的A口,B口和C口上,灯的亮灭可直接由8086输出0,1 控制。 设8253各口地址分别为:设8253基地址即通道0地址为04A0H,通道1为04A2H,通道2 为04A4H,命令控制口为04A6H。 黄灯闪烁的频率为1HZ,所以想到由8253产生一个1HZ的方波,8255控制或门打开的时 间,在或门打开的时间内,8253将方波信号输入或门使黄灯闪烁。 由于计数值最大为65535,1MHZ/65536的值远大于2HZ,所以采用两个计数器级联的方 式,8253通道0的clock0输入由分频器产生的1MHZ时钟脉冲,工作在方式3即方波发生器方 式,理论设计输出周期为0.01s的方波。1MHZ的时钟脉冲其重复周期为T=1/1MHZ=1s,因此 通道0的计数初值为10000=2710H。由此方波分别作为clock1和clock2的输入时钟脉冲,所以 通道1和通道2的输入时钟频率为100HZ,通道1作计数器工作在方式1,计数初值3000=BB8H 既30s,计数到则输出一个高电平到8255的PA7口,8255将A口数据输入到8086,8086检测 到高电平既完成30s定时。通道2工作在方式3需输出一个1HZ的方波,通过一个或门和8086 共同控制黄灯的闪烁,因此也是工作在方波发生器方式,其计数初值为100=64H,将黄灯的状态 反馈到8055的端口PB7和PC7,同样输入到8086,8086通过两次检测端口状态可知黄灯的状态 变化,计9次状态变化可完成5次闪烁。 三个通道的门控信号都未用,均接+5V即可。 ○ 2硬件原理及电路图 由于8255A与8086CPU是以低八位数据线相连接的,所以应该是8255A的A1、A 0 线分别与 8086CPU的A2、A线相连,而将8086的 1 A 0 线作为选通信号。如果是按8255A内部地址来看, 则在图中它的地址是PA口地址即(CS+000H),PB口地址为(CS+001H),PC口地址为(CS+002H),
大气污染控制工程试题库 参考答案版
《大气污染控制工程》试题库 一、选择题(每小题4个选项中,只有1项符合答案要求,错选、多选,该题不给分) 1.以下对地球大气层结构的论述中,错误的是()。 A. 对流层的厚度随地球纬度的增加而降低。 B. 暖层空气处于高度的电离状态,故存在着大量的离子和电子。 C. 平流层的气温几乎不随高度变化。 D. 中间层的气温随高度的增加而增加,该层空气不会产生强烈的对流运动。 2. 目前,我国排放大气污染物最多的是()。 A. 工业生产。 B. 化石燃料的燃烧。 C. 交通运输。 D. 生态环境破坏。 3. 烟囱上部大气是不稳定的大气、而下部是稳定的大气时,烟羽的形状呈()。 A. 平展型。 B. 波浪型(翻卷型)。 C. 漫烟型(熏蒸型)。 D. 爬升型(屋脊型)。 4. 尘粒的自由沉降速度与()的成反比。 A.尘粒的密度。 B. 气体的密度。 C. 尘粒的粒径。 D. 气体的粘度。 5.处理一定流量的气体,采用()净化时,耗用的能量为最小。 A. 重力除尘装置。 B. 惯性除尘装置。 C. 离心力除尘装置。
D. 洗涤式除尘装置。 6. 电除尘装置发生电晕闭塞现象的主要原因是()。 A. 烟尘的电阻率小于104Ω·cm。 B. 烟尘的电阻率大于1011Ω·cm。 C. 烟气温度太高或者太低。 D. 烟气含尘浓度太高。 7. 在以下关于德易希方程式的论述中,错误的是()。 A. 德易希方程式概括了分级除尘效率与集尘板面积、气体流量和粉尘驱进速度之间的 关系。 B. 当粒子的粒径相同且驱进速度也相同时,德易希方程式可作为除尘总效率的近似估 算式。 C. 当粒子的粒径相同且驱进速度不超过气流速度的10~20%时,德易希方程式可作 为除尘总效率的近似估算式。 D. 德易希方程式说明100%的分级除尘效率是不可能的。 8.直接应用斯托克斯公式计算含尘气流阻力的前提是()。 A.颗粒雷诺数Re p≤1,颗粒直径大于气体分子平均自由程。 B.1<Re p<500,颗粒直径大于气体分子平均自由程。 C.500<Re p<2×105,颗粒直径大于气体分子平均自由程。 D.颗粒雷诺数Re p≤1,颗粒直径小于气体分子平均自由程。 9.在以下有关填料塔的论述中,错误的是()。 A. 产生“塔壁效应”的主要原因是塔径与填料尺寸的比值太小。 B. 填料塔是一种具有固定相界面的吸收设备。 C. 当烟气中含有悬浮颗粒物时,填料塔中的填料容易堵塞。 D. 填料塔运行时的空塔气速一定要小于液泛气速。 10. 在以下有关气体吸附穿透曲线的论述中,错误的是()。 A.穿透曲线表示吸附床处理气体量与出口气体中污染物浓度之间的函数关系。 B.穿透曲线的形状取决于固定吸附床的操作条件。 C.穿透曲线表示吸附床床层厚度与出口气体中污染物浓度之间的函数关系。 D.穿透曲线斜率的大小可以反映吸附过程速率的快慢。 11.在以下石灰或石灰石湿式洗涤法烟气脱硫的化学反应式中,( D )是对吸
汇编课程设计
燕山大学 汇编语言课程设计说明书 题目:计算机钢琴程序 交通灯控制系统 学院(系):信息科学与工程学院 年级专业: 10级计算机科学2班 学号: 100104010113 学生姓名:马强 学号: 100104010116 学生姓名:夏洋 指导教师:何海涛、邹晓红 完成日期: 2013年7月3日
目录 1.课程设计的目的和意义........................................................................................................... - 2 - 1.1课程设计目的................................................................................................................ - 2 - 1.2课程设计的意义............................................................................................................ - 2 - 2.题目一:计算机钢琴程序....................................................................................................... - 2 - 2.1系统的主要功能............................................................................................................ - 2 - 2.2总体设计方案................................................................................................................ - 2 - 2.2.1扬声器驱动方式................................................................................................. - 2 - 2.2.2延时原理............................................................................................................. - 3 - 2.2.3键盘控制发声程序............................................................................................. - 4 - 2.2.4设计总结............................................................................................................. - 5 - 2.3作品使用说明................................................................................................................ - 6 - 3.题目二:交通灯控制系统....................................................................................................... - 6 - 3.1系统的主要功能............................................................................................................ - 6 - 3.2 系统工作原理............................................................................................................... - 6 - 3.2.1 8259的工作原理................................................................................................ - 6 - 3.2.2 8255A的工作原理:...................................................................................... - 7 - 3.2.3 8253的工作原理:............................................................................................ - 7 - 3.3总体设计方案................................................................................................................ - 7 - 3.3.1程序流程图......................................................................................................... - 8 - 3.3.2接口电路图....................................................................................................... - 11 - 3.4交通灯的设计总结...................................................................................................... - 11 - 4.课程设计心得体会................................................................................................................. - 12 - 5.参考文献................................................................................................................................. - 12 - 6.附录:程序代码..................................................................................................................... - 12 - 6.1计算机钢琴程序代码.................................................................................................. - 12 - 6.2交通灯控制系统代码.................................................................................................. - 14 -
自动立体车库PLC控制系统设计论文
摘要 立体车库是专门实现各种车辆的自动停放及科学寄存的仓储设施。随着城市里面汽车数量的不断增加,停车困难的问题己经成为大中型城市的普遍现象。自动立体化立体车库可充分利用上地资源,发挥空间优势,最大限度地停放车辆,成为解决城市停车困难问题的重要途径。本课题以最为典型的升降横移式立体车库为研究对象,综合考虑立体车库制造成本和运行效率等因素进行设计。 本文在对国内外车库现状及发展趋势做了充分调研的基础上,选择三层十车位式自动立体车库结构为研究模型。升降横移式立体车库就其组成部分而言,可分为三大部分:车库结构部分、传动机构部分和控制系统部分。本文简单介绍了车库的主体结构特点和传动机构部分。在对升降横移式立体车库控制系统的设计中,采用了先进的PLC控制,运用西门子公司的编程软件编制了升降横移式立体车库控制系统的程序,并经调试、运行,证明采用可编程序控制器(PLC)作为控制系统简单易行。其稳定、可靠、快速、性价比高的特点使得控制系统非常完美。为了使停车设备满足使用要求,根据国家关于机械式停车设备通用安全要求的标准、升降横移式立体车库的实际,在升降横移式立体车库中使用了一些必要的安全技术,这样保证了车辆的绝对安全,使得整个车库可以安全平稳的运行。 关键词:自动立体车库;控制系统;可编程序控制器。
Abstract Stereo garage is specifically implement check of vehicles automatic parking and scientific storage facilities. With the increasing of urban car ownership, parking problem has become a common phenomenon of large and medium-sized cities. Mechanical stereo garage can make full use of land resources, give full play to the advantage of the play maximum parking vehicles becoming the important way to slow the problem of urban static traffic. This topic was typical to lift move transversely type parking equipment as the research object, considering the three-dimensional garage dual factors of manufacturing cost and operation efficiency. In the garage at home and abroad present situation and the development trend on the basis of investigation and choose three layers of ten parking type automatic stereoscopic garage structure as the research model. Lifting and moving type stereo garage in terms of their component parts, can be divided into three parts: the garage structural parts, transmission parts and control system. This article simply introduces the main structural characteristics and transmission mechanism parts of the garage. In three-dimensional garage for lifting and moving the design of control system, adopt advanced PLC control, using Siemens programming software of the control system of three-dimensional garage for lifting and moving type, and the debugging and running, prove that using programmable controller (PLC) as control system is simple. Its stable, reliable, rapid, cost-effective features makes the control system very perfect. In order to make the parking equipment meets the requirement, according to the state of mechanical parking equipment general safety standards, lift the lateral movement type parking equipment and actual using some necessary safety technology in the lift move transversely, so that ensures the complete safety of the vehicle, make the whole garage can be safe and smooth operation. Keywords:automatic stereoscopic garage;control system;PLC.
微机原理课程设计报告
微型计算机技术课程设计 指导教师: 班级: 姓名: 学号: 班内序号: 课设日期: _________________________
目录 一、课程设计题目................. 错误!未定义书签。 二、设计目的..................... 错误!未定义书签。 三、设计内容..................... 错误!未定义书签。 四、设计所需器材与工具 (3) 五、设计思路..................... 错误!未定义书签。 六、设计步骤(含流程图和代码) ..... 错误!未定义书签。 七、课程设计小结 (36)
一、课程设计题目:点阵显示系统电路及程序设计 利用《汇编语言与微型计算机技术》课程中所学的可编程接口芯片8253、8255A、8259设计一个基于微机控制的点阵显示系统。 二、设计目的 1.通过本设计,使学生综合运用《汇编语言与微型计算机技术》、《数字电子技术》等课程的内容,为今后从事计算机检测与控制工作奠定一定的基础。 2.掌握接口芯片8253、8255A、8259等可编程器件、译码器74LS138、8路同相三态双向总线收发器74LS245、点阵显示器件的使用。 3.学会用汇编语言编写一个较完整的实用程序。 4.掌握微型计算机技术应用开发的全过程,包括需求分析、原理图设计、元器件选用、布线、编程、调试、撰写报告等步骤。 三、设计内容 1.点阵显示系统启动后的初始状态 在计算机显示器上出现菜单: dot matrix display system 1.←left shift display 2.↑up shift display 3.s stop 4.Esc Exit 2.点阵显示系统运行状态 按计算机光标←键,点阵逐列向左移动并显示:“微型计算机技术课程设计,点阵显示系统,计科11302班,陈嘉敏,彭晓”。 按计算机光标↑键,点阵逐行向上移动并显示:“微型计算机技术课程设计,点阵显示系统,计科11302班,陈嘉敏,彭晓”。 按计算机光标s键,点阵停止移动并显示当前字符。 3.结束程序运行状态 按计算机Esc键,结束点阵显示系统运行状态并显示“停”。 四.设计所需器材与工具 1.一块实验面包板(内含时钟信号1MHz或2MHz)。 2.可编程芯片8253、8255、74LS245、74LS138各一片,16×16点阵显示器件一片。
汇编与微机原理课程设计报告
微机接口课程设计报告 (题目:模拟自动门) 指导老师郭兰英 班级2015240204
目录 一概述 (1) 1.1 课程设计名称 (1) 1.2 课程设计要求 (1) 1.3 课程设计目的 (1) 二设计思想 (1) 三实施方案 (2) 3.1 获得传感器和“门”的状态 (2) 3.2 驱动步进电机和点阵模块 (2) 3.3 实现硬件延时 (3) 四硬件原理 (3) 4.1 中断控制器8259 (4) 4.2并行接口8255 (4) 4.3 定时/计数器8254 (5) 4.4 点阵LED显示屏 (5) 4.5 步进电机 (6) 4.6 红外距离传感器 (7) 五软件流程 (8) 六程序运行结果及分析 (11) 6.1 开门状态 (11) 6.2 关门状态 (12) 6.3 关门操作进行时中断到开门操作 (14)
6.4特殊状态 (15) 七个人感想 (16) 八附录 (18)
一、概述 1.1课程设计名称 模拟自动门 1.2课程设计要求 1)用汇编语言编程完成硬件接口功能设计。 2)硬件电路基于80x86微机接口。 3)程序功能包含:步进电机转动、点阵显示开关门、传感器检测是否有人、8254延时。 4)传感器检测有人时开门,门全开后延时几秒关门,若关门时检测到有人,立刻开门。 1.3课程设计目的 通过本课程设计,让学生对微机系统有一个较面的理解,对典型数字接口电路的应用技术有一个较深入的掌握,并对应用系统进行硬件原理和软件编程进行分析、设计和调试,达到基本掌握简单微型计算机应用系统软硬件的设计方法,提高项目开发能力的目的。要求同学分组完成课题,写出课程设计说明书,画出电路原理图,说明工作原理,编写设计程序及程序流程图。 二、设计思想 本程序主要功能是模拟商场等公共场所的自动门,实现有物体靠近并被传感器检测到时发生一系列变化的效果,模拟实现开门关门的功能。 为了尽量模拟真实场景下的自动门状态变化,本程序主要可以实现以下功能: 1、当传感器可检测范围内检测到物体,并且“门”为“关”的状态,立即“打开门”,即用一系列的硬件动作模拟自动门打开的动作和状态。 2、当“门”完全打开后一段时间后,传感器范围内检测不到物体时,立即“关闭门”, 用一系列的硬件动作模拟自动门关闭的动作和状态。
大气污染控制工程第三版课后答案
第一章 概 论 第二章 1.1 解: 按1mol 干空气计算,空气中各组分摩尔比即体积比,故n N2=0.781mol ,n O2=0.209mol ,n Ar =0.00934mol ,n CO2=0.00033mol 。质量百分数为 %51.75%100197.2801.28781.0%2=???= N ,% 08.23%100197.2800 .32209.0%2=???=O ; %29.1%100197.2894.3900934.0%=???=Ar ,% 05.0%100197.2801 .4400033.0%2=???=CO 。 1.2 解: 由我国《环境空气质量标准》二级标准查得三种污染物日平均浓度限值如下: SO2:0.15mg/m 3,NO2:0.12mg/m 3,CO :4.00mg/m 3。按标准状态下1m 3 干空气计算,其摩尔 数为mol 643.444.221013 =?。故三种污染物体积百分数分别为: SO 2:ppm 052.0643.44641015.03=??-,NO 2:ppm 058.0643.44461012.03 =??- CO :ppm 20.3643.44281000.43 =??-。 1.3 解: 1)ρ(g/m 3 N )334/031.1104.221541050.1N m g =???=-- c (mol/m 3 N )3334/1070.6104.221050.1N m mol ---?=??=。 2)每天流经管道的CCl 4质量为1.031×10×3600×24×10-3 kg=891kg 1.4 解: 每小时沉积量200×(500×15×60×10-6 )×0.12g μ=10.8g μ 1.5 解: 由《大气污染控制工程》P14 (1-1),取M=210 2369.0105.19102.22102 4 22=???==--∝O p p M Hb O COHb , COHb 饱和度% 15.192369.012369.0/1/222=+=+=+= Hb O COHb Hb O COHb Hb O COHb COHb CO ρ 1.6 解: 含氧总量为mL 96010020 4800=?。不同CO 百分含量对应CO 的量为: 2%:mL 59.19%2%98960=?,7%:mL 26.72%7%93960 =?
(完整版)基于PLC的立体车库控制系统开题报告
毕业设计开题报告 课题题目基于PLC的立体车库控制系统设计 课题来源生产实践是否实做□ 成果形式毕业设计■ 毕业论文□ 开题报告内容(可另附页) 见附页 指导教师意见(课题难度是否适中、工作量是否饱满、进度安排是否合理、工作条件是否具备等) 课题难度适中,工作量饱满,进度安排合理,具备毕业设计工作条件。 指导教师签名: 年月日 专家组及学院意见(选题是否适宜、各项内容是否达到毕业设计(论文)大纲要求、整改意见等) 专家组成员签字:教学院长(签章): 年月日
附页 附页 一.课题研究的目的及意义 随着社会的发展,城市人口日益增多,楼房和车辆也越来越多,特别是随着改 革开放以来,国民经济的高速发展为汽车工业的振兴注入了强劲的动力。目前 中国家用轿车的保有量为489 万辆到2010年将增加达到1466万辆2倍,到2020年这一数字再增加4倍,达到7200万辆。届时我国大城市的车辆越来越多,而除了新建的高档住宅小区外,大多数普通住宅小区的车库严重配套不足,以至于小区内小轿车到处乱停乱放,马路边、人行道、甚至草坪上都停车。“十五”期间,国家鼓励轿车进入家庭,随着城市居民汽车普及率的大幅提高,在中 国城市土地资源越来越紧缺的情况下,城市住宅小区的停车难问题已经日益突出,许多大城市为了解决这个问题,都提出了住宅小区停车位的供应以配建为主,并都制定了新的建筑物配建停车设施标准,如合肥市住宅区配建停车位标 准提高到0.5-1.6个不等。 但我国大城市普通住宅区以及老城区以前建立的住宅区大部分都没有建停车场(库),也不会有太大的地方和空间来建大型停车场,也就无法满足住宅小区内广大居民的停车需求。为此停车问题也就逐渐成为大城市一个大难题。城市中有 限的地面面积已经无法提供足够的停车车位,于是向空间发展成为解决当前问 题的一条重要途径。立体停车库就是在这种背景下发展起来的。研究立体停车 库网络智能管理系统不仅能够降低成本,带来经济效益,更能提高效率,方便 人们的日常生活。最后,通过毕业设计,在综合利用以前所学知识同时,进一 步的学习了专业知识,为参加工作和进一步的深造做准备。 二.本课题国内外研究现状 早在50多年前,立体停车就在国外有所发展,先后出现了针对家庭使用的双层停车设备,利用住宅空地建起2-4层升降横移停车设备,适合城市中心商住区 使用的停车楼和停车塔;利用广场、建筑物下面的空间建设地下车库。自70年代末起,世界经济高速发展,汽车逐渐普及,保有量不断增加,迫使地少人多、车多的国家、地区和一些发达国家积极开展了机械式停车技术的研究开发和制 造应用。以日本、美国、德国等为代表的发达国家在停车技术领域的研究处于