直升机飞行操控的基本原理
直升机飞行操控的基本原理
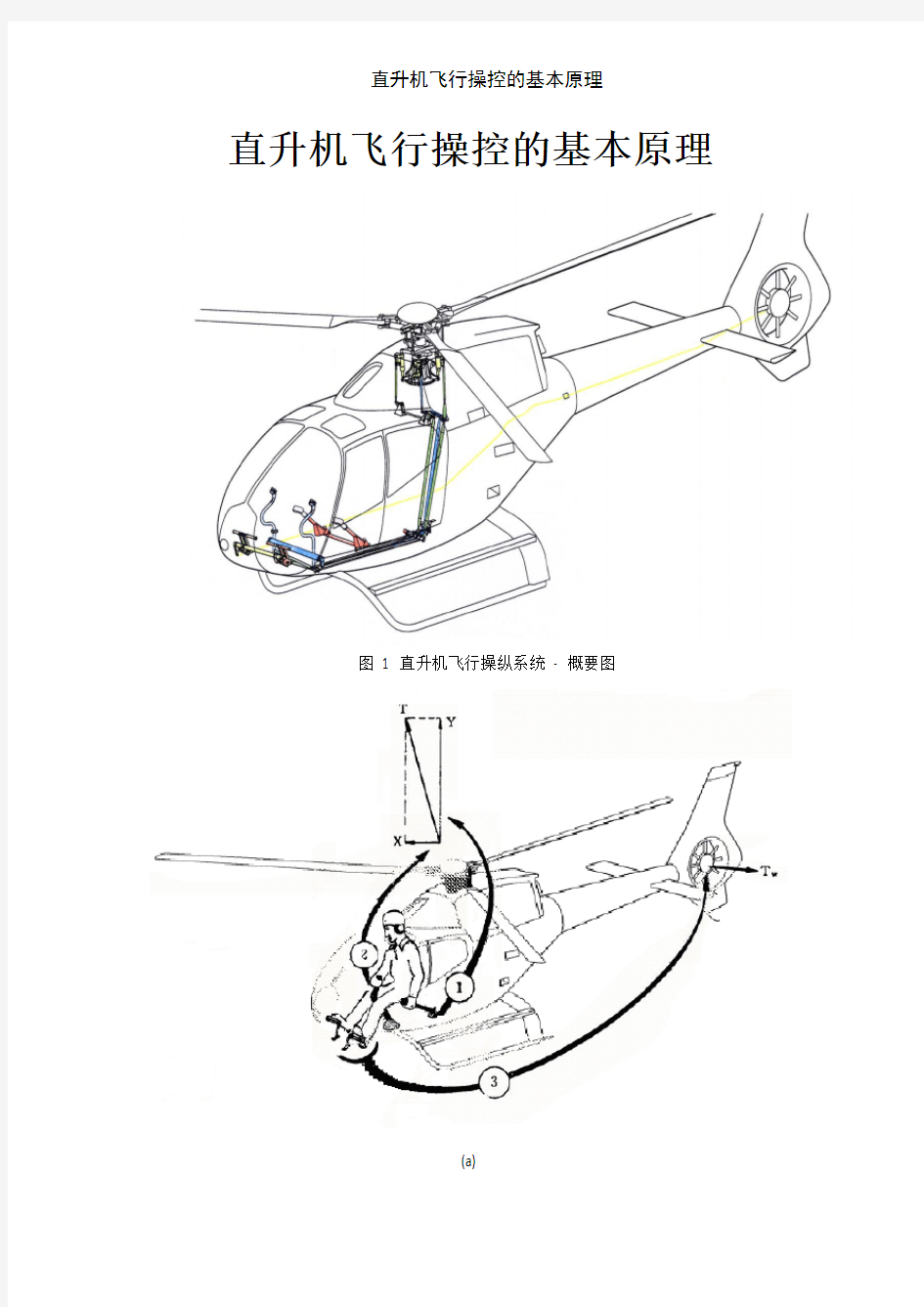
图 1 直升机飞行操纵系统- 概要图
(a)
(b)
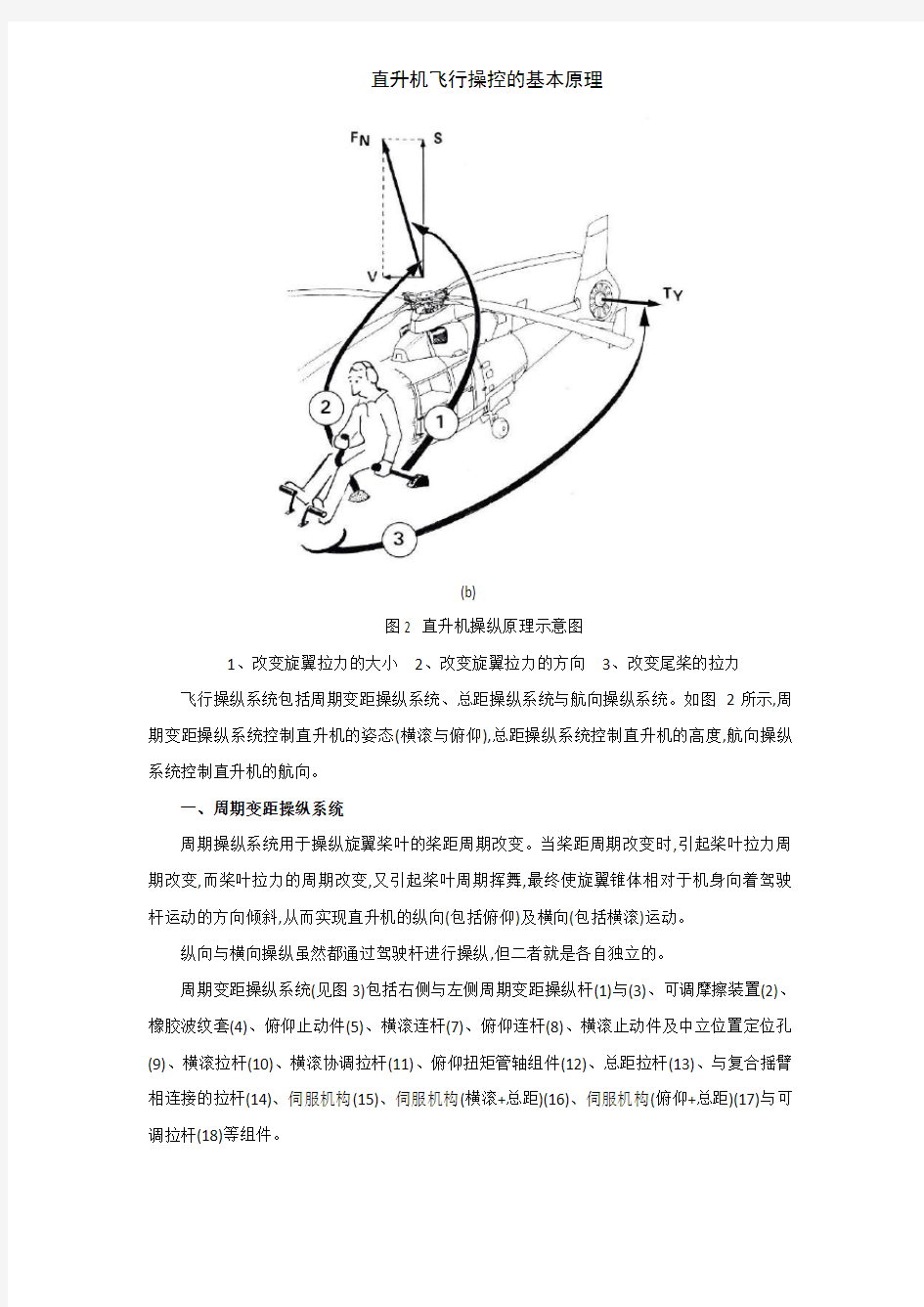
图2 直升机操纵原理示意图
1、改变旋翼拉力的大小
2、改变旋翼拉力的方向
3、改变尾桨的拉力
飞行操纵系统包括周期变距操纵系统、总距操纵系统与航向操纵系统。如图2所示,周期变距操纵系统控制直升机的姿态(横滚与俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统
周期操纵系统用于操纵旋翼桨叶的桨距周期改变。当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向与横向操纵虽然都通过驾驶杆进行操纵,但二者就是各自独立的。
周期变距操纵系统(见图3)包括右侧与左侧周期变距操纵杆(1)与(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)与可调拉杆(18)等组件。
1、右侧周期变距操纵杆3、左侧周期变距操纵杆
2、可调摩擦装置4、橡胶波纹套5、俯仰止动件6、复合摇臂 7、横滚连杆8、俯仰连杆9、横滚止动件及中立位置定位孔10、横滚拉杆11、横滚协调拉杆12、俯仰扭矩管轴组件1
3、总距拉杆1
4、与复合摇臂相连接的拉杆1
5、伺服机构1
6、伺服机构(横滚+总距) 1
7、伺服机构(俯仰+总距) 1
8、
可调拉杆
图 3 直升机周期变距操纵系统
(一)纵向操纵情况
当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。后拉驾驶杆,情况相反。
(二)横向操纵情况
当右压驾驶杆时,驾驶杆向右偏转,带动左横滚连杆(7)向前运动,同时右横滚连杆(7)向后
运动。通过复合摇臂(6)及其后的拉杆、摇臂,使左后侧横向伺服机构上移,右侧伺服机构下移,自动倾斜器固定盘向右前方倾斜,旋翼桨盘右倾,进而使直升机向右运动。左压驾驶杆情况相反。
二、总距操纵系统
总距操纵系统用于操纵旋翼的总桨距,使各片桨叶的桨距同时增大或减小,从而改变旋翼拉力的大小。旋翼总桨距改变时,其需用功率也随之改变。因此,还必需相应地改变发动机的油门,使发动机输出功率与旋翼的需用功率相匹配。为了减轻驾驶员的负担,通常将发动机的油门操纵与总桨距操纵交联。这样,当驾驶员操纵总桨距时,发动机的油门开度(供油量)也相应改变。所以,总桨距操纵又称为桨距—油门操纵,它就是由一根桨距—油门杆来进行操纵的。
旋翼的总桨距以及周期变距操纵都就是通过自动倾斜器实现的。
总距操纵系统包括旋翼手柄(1)、可调摩擦装置(2)、总距扭矩管(3)、总距拉杆(4)、复合摇臂(5)、总距杆配平弹簧(6)、总距止动件及中心位置定位孔(7)、左侧与右侧总距杆(8)与(9)、复合摇臂上的预调器操纵摇臂(10)、横滚连杆(11)、俯仰拉杆(12)、与复合摇臂相连接的拉杆(13)、伺服机构(14)、伺服机构(横滚+总距)(15)、伺服机构(俯仰+总距)(16)与可调拉杆(17)等组件。
四旋翼飞行器结构和原理
四旋翼飞行器结构和原理 1.结构形式 旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。 .工作原理 四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。 (1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。 (2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。 (3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。 (4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机1和电机3 的转速上升,电机2 和电机4 的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在
直升飞机飞行原理
直升飞机飞行原理 直升机的机翼与固定翼飞机一样,当气流从机翼前缘流向机翼后缘,从上翼面流过的气流比下翼面走过的路程长,为避免出现真空,上翼面的气流流速比下翼面的大。根据伯努利方程,相同条件下,气流的静压与动压的和恒定,因为上翼面的气流的流速大,导致动压大,所以其静压就小,机翼收到来自上翼面的压力小于来自下翼面的压力,大气对机翼的总压力向上,这个压力就是升力,有了升力直升机就能飞起来,但机翼旋转会对机身产生扭矩,为了不使机身旋转,通过加尾浆的方式平衡掉这个扭矩,所以直升机都是有尾浆的。直升机的机翼旋转面和轴的夹角可以通过杠杆机构来调整,通过调整这个夹角使升力与直升机的重力同轴或不同轴,同轴时,直升机悬停,不同轴时,直升机前飞 直升机升空的原理和竹蜻蜓是一样的,主桨桨叶上产生升力。至于你说的玩具有两个桨,而真机只有一个,应该是上下两层吧,总共四片桨叶,而真机只有一层。都知道,主桨高速转动,会给机身一个反方向的扭矩,如果不加以平衡,机身就会沿着和主桨转动方向相反的方向高速自旋,这样的直升机能飞么?玩具的两层桨叶就是平衡这个扭矩的,你仔细观察下,上下桨的转动方向一定是相反的,也就是靠两对桨叶给机身的扭矩来平衡机身,它们给机身的扭矩方向是相反的,如果大小也相同,那么机身就能保持稳定。但是真机,或者真正的航模直升机,都是单层桨叶的,因为它们都带尾桨,靠尾桨产生的推力来稳住机身。主桨产生的扭矩如果会使机尾顺时针旋转,那么就让尾桨产生逆时针的推力,平衡这个顺时针的扭矩。
一、直升机与普通飞机区别及飞行简单原理:不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。(1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。(2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。(3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。(4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。二、平衡分析(对单旋翼式):(1)直升飞机的大螺旋桨旋转产生升力平衡重力。直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。(2)直升飞机的横向稳定。因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。三、能量方式分析。根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析 能量也是守衡的
四旋翼飞行器论文(原理图 程序)..
四旋翼自主飞行器(B题) 摘要 系统以R5F100LE作为四旋翼自主飞行器控制的核心,由电源模块、电机调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行控制模块包括角度传感器、陀螺仪,传感器检测模块包括红外障碍传感器、超声波测距模块、TLS1401-LF模块,瑞萨MCU综合飞行器模块和传感器检测模块的信息,通过控制4个直流无刷电机转速来实现飞行器的欠驱动系统飞行。在动力学模型的基础上,将小型四旋翼飞行器实时控制算法分为两个PID控制回路,即位置控制回路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。
目录 1 系统方案论证与控制方案的选择............................................................................................. - 2 - 1.1 地面黑线检测传感器............................................................................................................. - 2 - 1.2 电机的选择与论证................................................................................................................. - 2 - 1.3 电机驱动方案的选择与论证................................................................................................. - 3 - 2 四旋翼自主飞行器控制算法设计............................................................................................. - 3 - 2.1 四旋翼飞行器动力学模型..................................................................................................... - 3 - 2.2 PID控制算法结构分析.......................................................................................................... - 3 - 3 硬件电路设计与实现................................................................................................................. - 5 - 3.1飞行控制电路设计.................................................................................................................. - 5 - 3.2 电源模块................................................................................................................................. - 6 - 3.3 电机驱动模块......................................................................................................................... - 6 - 3.4 传感器检测模块..................................................................................................................... - 7 - 4 系统的程序设计......................................................................................................................... - 8 - 5 测试与结果分析......................................................................................................................... - 9 - 5.1 测试设备................................................................................................................................. - 9 - 5.2 测试结果................................................................................................................................. - 9 - 6 总结........................................................................................................................................... - 10 - 附录A 部分程序清单.................................................................................................................. - 11 -
直升机飞行原理(图解)
飞行原理(图解) 直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题。 直升机主旋翼反扭力的示意图 没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法 直升机抵消反扭力的方案有很多,最常规的是采用尾桨。主旋翼顺时针转,对机身就产生逆
时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力。 抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。 尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右
直升机发动机原理
一、直升机与普通飞机区别及飞行简单原理: 不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。 (1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。 (2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。 (3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。 (4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。 二、平衡分析(对单旋翼式): (1)直升飞机的大螺旋桨旋转产生升力平衡重力。 直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。 (2)直升飞机的横向稳定。 因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。 三、能量方式分析。 根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。 而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析能量也是守衡的。
飞机飞行的原理图解
飞机飞行的原理图解 飞机是指具有一具或多具发动机的动力装置产生前进的推力或拉力,由机身的固定机翼产生升力,在大气层内飞行的重于空气的航空器。 飞机飞行原理: 1、飞机上升是根据伯努利原理,即流体(包括炝骱退流)的流速越大,其压强越小;流速越小,其压强越大。 2、飞机的机翼做成的形状就可以使通过它机翼下方的流速低于上方的流速,从而产生了机翼上、下方的压强差(即下方的压强大于上方的压强),因此就有了一个升力,这个压强差(或者说是升力的大小)与飞机的前进速度有关。 3、当飞机前进的速度越大,这个压强差,即升力也就越大。所以飞机起飞时必须高速前行,这样就可以让飞机升上天空。当飞机需要下降时,它只要减小前行的速度,其升力自然会变小,小于飞机的重量,它就会下降着陆了。
飞机的组成: 大多数飞机都是由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成。 机翼:主要功用是为飞机提供升力,以支持飞机在空中飞行,也起一定的稳定和操纵作用。在机翼上一般安装有副翼和襟翼。操纵副翼可使飞机滚,放下襟翼能使机翼升力系数增大。另外,机翼上还可安装发动机、起落架和油箱等。 1.机身:主要功用是装载乘员、旅客、武器、货物和各种设备,还可将飞机的其它部件如尾翼、机翼及发动机等连接成一个整体。
2.尾翼:包括水平尾翼(平尾)和垂直尾翼(垂尾)。水平尾翼由固定的水平安定面和可动的升降沧槌伞4怪蔽惨碓虬括固定的垂直安定面和可动的方向舵。尾翼的主要功用是用来操纵飞机俯仰和偏转,以及保证飞机能平稳地飞行。 3.起落装置:飞机的起落架大都由减震支柱和机轮组成,作用是起飞、着陆滑跑,地面滑行和停放时支撑飞机。 4.动力装置:主要用来产生拉力和推力,使飞机前进。其次还可为飞机上的其他用电设备提供电源等。除了发动机本身,动力装置还包括一系列保证发动机正常工作的系统。
直升机与普通飞机区别及飞行简单原理
直升机与普通飞机区别及飞行简单原理: 不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。 (1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。 (2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。(3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。 (4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。 三、平衡分析(对单旋翼式): (1)直升飞机的大螺旋桨旋转产生升力平衡重力。 直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。 (2)直升飞机的横向稳定。 因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。 四、能量方式分析。 根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。 而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析能量也是守衡的。 直升机螺旋桨升力计算公式 一般直升机的旋翼系统是由主旋翼.尾旋翼和稳定陀螺仪组成,如国产直-8,直-9。 也有共轴反旋直升机,主旋翼是上下两层反转螺旋桨,无尾翼,如俄罗斯的卡-28。
四旋翼飞行器的结构形式和工作原理
四旋翼飞行器的结构形式和工作原理 1.结构形式 直升机在巧妙使用总距控制和周期变距控制之前,四旋翼结构被认为是一种最简单和最直观的稳定控制形式。但由于这种形式必须同时协调控制四个旋翼的状态参数,这对驾驶员认为操纵来说是一件非常困难的事,所以该方案始终没有真正在大型直升机设计中被采用。这里四旋翼飞行器重新考虑采用这种结构形式,主要是因为总距控制和周期变距控制虽然设计精巧,控制灵活,但其复杂的机械结构却使它无法再小型四旋翼飞行器设计中应用。另外,四旋翼飞行器的旋翼效率相对很低,从单个旋翼上增加拉力的空间是非常有限的,所以采用多旋翼结构形式无疑是一种提高四旋翼飞行器负载能力的最有效手段之一。至于四旋翼结构存在控制量较多的问题,则有望通过设计自动飞行控制系统来解决。四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。四旋翼飞行器的结构形式如图1.1所示。
图1.1四旋翼飞行器的结构形式 2.工作原理 典型的传统直升机配备有一个主转子和一个尾桨。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器基本原理
四旋翼飞行器无刷直流电机调速系统的设计 孟磊,蒋宏,罗俊,钟疏桐 武汉理工大学自动化学院、武汉理工大学信息工程学院 摘要,关键字:略 近年来,无人机的研究和应用广泛受到各个方面的重视。四旋翼飞行器作为无人机的一种,能够垂直起落、空中悬停、可适用于各种飞行速度与飞行剖面,具有灵活度高、安全性好的特点,适用于警务监控、新闻摄影、火场指挥、交通管理、地质灾害调查、管线巡航等领域实现空中时时移动监控。 四旋翼飞行器的动力来源是无刷直流电机,因此针对该型无刷直流电机的调速系统对飞行器的性能起着决定性的作用。为了提高四旋翼飞行器的性能,本文设计制作了飞行试验平台,完成了直流无刷电机无感调速系统的硬件、软件设计。通过实验证明该系统的设计是可行的。 四旋翼飞行器平台结构 四旋翼平台呈十字形交叉,有四个独立电机驱动螺旋桨组成。当飞行器工作时,平台中心对角的螺旋桨转向相同,相邻的螺旋桨转向相反同时增加减少四个螺旋桨的速度,飞行器就垂直上下运动;相反的改变中心对角的螺旋桨速度,可以产生滚动、俯仰等运动。结构图如下: 四旋翼飞行器的控制系统分为两个部分:飞行控制系统和无刷直流电机调速系统。飞行控制系统通过IMU惯性测量单位(由陀螺传感器和加速度传感器组成)检测飞行姿态,通过无线通讯模块与地面遥控器通信。4个无刷直流电机调速系统通过I2C总线与飞行控制器通信,通过改变4个无刷直流电机的转速来改变飞行姿态,系统采用12V电池供电。控制系统结构图如下:
无刷直流电机调速系统 无刷直流电动机既具有运行效率高、调速性能好,同时又具有交流电动机结构简单、运行可靠、维护方便的优点,是电机主要发展方向之一,现已成功运用与军事、航空、计算机数控机床、机器人、电动自行车等多个领域。在该四旋翼飞行器上使用了新西达2217外转子式无刷直流电机,其结构为12绕组7对磁极,典型KV值为1400. 通常无刷直流电机的控制方式分为有位置传感器控制方式和无位置传感器控制方式。有位置传感器控制方式通过再定子上安装电磁式、光电式或者磁敏式位置传感器来检测转子的位置,为驱动电路提供转向信息。无位置传感器的控制方式有很多,包括磁链计算法‘反电动势法、状态观测器法、电感法等。在各种无位置传感器控制方法中,反电动势法是目前技术最为成熟的、应用最为广泛的一种位置检测方法。本系统采用的饭店董事过零检测法是反电动势法中的一种,通过检测各相绕组反电动势的过零点来判断转子的位置。根据无刷直流电机的特性,电机的最佳转向时刻是想反电动势过零点延迟30电角度的时刻,而该延迟的电角度对应的时间可以有两次过零点时间间隔计算得到。 无刷直流电机调速系统硬件设计 该无刷直流电机调速系统有三相全桥驱动电路、反电势过零电路、电流电压检测电路组成电机驱动器。使用一片ATmega8单片机作为控制器,该单片机内部集成了8kB的flash,最多具有23个可编程的I/O口,输出时为推挽结构输出,驱动能力较强。片上集成了AD 转换器、模拟比较器、通用定时器、可编程计数器等资源。 三相全桥驱动电路利用功率型MOS管作为开关器件,选用P型MOS管FD6637与N型MOS管FD6635搭配使用,设计容量为允许通过的最大电流为30A。FD6637的开关利用三极管9013进行驱动、FD6635的开关直接用单片机的I/O口进行驱动。电路如图3所示。通过R17、R19、R25来减少下管FDD6635的栅极充电电流峰值,防止震荡并保护MOS管;R16、R23、R24作为下拉电阻,保证下关的正常导通与关断;R2、R5、R8作为上管栅极上拉电阻,阻值选择470Ω,既保证了MOS管的开关速率不降低,同时也防止三极管Ic电流过大。A+、B+、C+提供驱动桥的上桥臂的栅极导通信号,分别通过ATmega8的三个硬件PWM通道驱动,通过改变PWM信号的占空比来实现电机调速;A-、B-、C-提供下桥臂栅极驱动信号,由单片机的I/O口控制,只有导通和关闭两种状态。
直升机操控原理
第六章 直升机的操纵原理
直升机不同于固定翼飞机,一般都没有在飞行中 供操纵的专用活动舵面。这是由于在小速度飞行 或悬停中,其作用也很小,因为只有当气流速度 很大时舵面或副翼才会产生足够的空气动力。单 旋翼带尾桨的直升机主要靠旋翼和尾桨进行操纵, 而双旋翼直升机靠两副旋翼来操纵。由此可见, 旋翼还起着飞机的舱面和副翼的作用。
直升机操纵原理
旋翼不仅提供升力同时也是直升机的主要操 纵面。
总距操纵杆:通过自动倾斜器改变旋翼桨叶 总距,控制直升机的升降运动。提杆,增大 总距,升力增大,直升机上升;压杆,减小 总距,直升机下降。
周期变距操纵杆:操纵周期变距操纵杆,使 自动倾斜器相应的倾斜,从而使桨叶的桨距 作每周一次的周期改变,造成旋翼拉力矢量 按相应的方向倾斜,达到控制直升机的前、 后(左、右)和俯仰(或横滚)运动。
直升机操纵原理
脚蹬:控制尾桨,实现航向操纵。 尾桨:平衡旋翼反扭矩、航向操纵。 垂尾:增加航向稳定性。 平尾:增加俯仰稳定性。
直升机操纵原理(续)
6.1 直升机操纵特点
直升机驾驶员座舱 操纵机构及配置直 升机驾驶员座舱主 要的操纵机构是: 驾驶杆(又称周期 变距杆)、脚蹬、 油门总距杆。此外 还有油门调节环、 直升机配平调整片 开关及其他手柄.
驾驶杆和脚蹬
驾驶杆位于驾驶员座椅前面,通过操纵线系与旋翼 的自动倾斜器连接。驾驶杆偏离中立位置表示:
向前——直升机低头并向前运动; 向后——直升机抬头并向后退; 向左——直升机向左倾斜并向左侧运动; 向右——直升机向右倾斜并向右侧运动。 脚蹬位于座椅前下部,对于单旋翼带尾桨的直升机
来说,驾驶员蹬脚蹬操纵尾桨变距改变尾桨推(拉) 力,对直升机实施航向操纵。
四旋翼飞行器简单原理描述.
四旋翼飞行器相对于常规航模来说,最复杂的就是电子部分。之所以能飞行得很稳定, 全拜电子控制部分的功劳。在常规固定翼飞机上, 陀螺仪并非常用器件,在相对操控难度大点的直机上, 如果不做自动稳定系统, 也只是锁尾才用到陀螺仪。四旋翼飞行器与其不同的地方是必须配备陀螺仪, 这是最基本要求, 不然无法飞行, 更谈不上飞稳了。不但要有, 还得是 3轴向 (X、 Y 、 Z 都得有,这是四旋翼飞行器的机械结构、动力组成特性决定的。在此基础上再辅以 3 轴加速度传感器,这 6个自由度,就组成了飞行姿态稳定的基本部分, 也是关键核心部分 ---惯性导航模块,简称 IMU 。 再说说电调, 四旋翼飞行器有四个桨, 两两相对呈十字交叉结构, 在桨的转向上分正转和反转,这样可抵消模型自身的旋转。每个桨的直径很小,通常是 10寸左右。四个桨转动时的离心力是分散的。不像直机的桨, 只有一个能产生集中的离心力形成陀螺性质的惯性离心力, 保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。四旋翼为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规 PPM 电调的更新速度只有 50Hz 左右,满足不了这种控制所需要的速度,且 PPM 电调 MCU 内置 PID 稳速控制, 能对常规航模提供顺滑的转速变化特性, 用在四旋翼上就不合适了, 四旋翼需要的是快速反应的电机转速变化。用高速专用电调, I2C 总线接口传送控制信号, 可达到每秒几百上千次的电机转速变化, 在四旋翼飞行时, 姿态时刻能够保持稳定。即使受到外力突然冲击,依旧安然无恙。 电调篇 为什么需要电调? 电调的作用就是将飞控板的控制信号, 转变为电流的大小, 以控制电机的转速。因为电机的电流是很大的, 通常每个电机正常工作时, 平均有 3a 左右的电流, 如果没有电调的存在, 飞控板根本无法承受这样大的电流(另外也没驱动无刷电机的功能。
四旋翼飞行器实验报告
实验报告 课程名称:《机械原理课内实验》 学生姓名:徐学腾 学生学号:1416010122 所在学院:海洋信息工程学院 专业:机械设计制造及其自动化 报导教师:宫文峰 2016年6 月26 日
实验一四旋翼飞行器实验 一、实验目的 1.通过对四旋翼无人机结构的分析,了解四旋翼无人机的基本结构、工作的原理和传动控制系统; 2. 练习采用手机控制终端来控制无人机飞行,并了解无人机飞行大赛的相关内容,及程序开发变为智能飞行无人机。 二、实验设备和工具 1. Parrot公司AR.Drone 2.0四旋翼飞行器一架; 2. 苹果手机一部; 3. 蓝牙数据传输设备一套。 4. 自备铅笔、橡皮、草稿纸。 三、实验内容 1、了解四旋翼无人机的基本结构; 2、了解四旋翼无人机的传动控制路线; 3、掌握四旋翼无人机的飞行控制的基本操作; 4、了解四旋翼无人机翻转动作的机理; 5、能根据指令控制无人机完成特定操作。 四、实验步骤 1、学生自行用IPHONE手机下载并安装AR.FreeFlight四旋翼飞行器控制软件。 2、检查飞行器结构是否完好无损; 3、安装电沲并装好安全罩; 4、连接WIFI,打开手机AR.FreeFlight软件,进入控制界面; 5、软件启动,设备连通,即可飞行。 6、启动和停止由TAKE OFF 控制。 五、注意事项 1.飞行器在同一时间只能由一部手机终端进行控制; 2. 飞行之前,要检查螺旋浆处是否有障碍物干涉; 3. 飞行之后禁止用手去接飞行器,以免螺旋浆损伤手部; 4. 电量不足时,不可强制启动飞行; 5. 翻转特技飞行时,要注意飞行器距地面高度大于4米以上; 6. 飞行器不得触水; 7. 飞行器最大续航时间10分钟。
直升机飞行原理
直升机与旋翼机的飞行原理 直升机的飞行原理 1. 概况 与普通飞机相比,直升机不仅在外形上,而且在飞行原理上都有所不同。一般来讲它没有固定的机翼和尾翼,主要靠旋翼来产生气动力。这里所说的气动力既包括使机体悬停和举升的升力,也包括使机体向前后左右各个方向运动的驱动力。直升机旋翼的桨叶剖面由翼型构成,叶片平面形状细长,相当于一个大展弦比的梯形机翼,当它以一定迎角和速度相对于空气运动时,就产生了气动力。桨叶片的数量随着直升机的起飞重量而有所不同。重型直升机的起飞重量在20t以上,桨叶的数目通常为六片左右;而轻、小型直升机,起飞重量在以下,一般只有两片桨叶。 直升机飞行的特点是: (1) 它能垂直起降,对起降场地要求较低; (2) 能够在空中悬停。即使直升机的发动机空中停车时,驾驶员可通过操纵旋翼使其自转,仍可产生一定升力,减缓下降趋势; (3) 可以沿任意方向飞行,但飞行速度较低,航程相对来说也较短。 2. 直升机旋翼的工作原理 直升机旋翼绕旋翼转轴旋转时,每个叶片的工作类同于一个机翼。旋翼的截面形状是一个翼型,如图所示。翼型弦线与垂直于桨毂旋转轴平面(称为桨毂旋转平面)之间的夹角称为桨叶的安装角,以表示,有时简称安装角或桨距。各片桨叶的桨距的平均值称为旋翼的总距。驾驶员通过直升机的操纵系统可以改变旋翼的总距和各片桨叶的桨距,根据不同的飞行状态,总距的变化范围约为2o~14o。
气流V 与翼弦之间的夹角即为该剖面的迎角。显然,沿半径方向每段叶片上产生的空气动力在桨轴方向上的分量将提供悬停时需要的升力;在旋转平面上的分量产生的阻力将由发动机所提供的功率来克服。 旋翼旋转时将产生一个反作用力矩,使直升机机身向旋翼旋转的反方向旋转。前面提到过,为了克服飞行力矩,产生了多种不同的结构形式,如单桨式、共轴式、横列式、纵列式、多桨式等。对于最常见的单桨式,需要靠尾桨旋转产生的拉力来平衡反作用力矩,维持机头的方向。使用脚蹬来调节尾桨的桨距,使尾桨拉力变大或变小,从而改变平衡力矩的大小,实现直升机机头转向(转弯)操纵。 3. 直升机旋翼的操纵 直升机的飞行控制与飞机的飞行控制不同,直升机的飞行控制是通过直升机旋翼的倾斜实现的。直升机的控制可分为垂直控制、方向控制、横向控制和纵向控制等,而控制的方式都是通过旋翼实现的,具体来说就是通过旋翼桨毂朝相应的方向倾斜,从而产生该方向上的升力的水平分量达到控制飞行方向的目的。 直升机体放在地面时,旋翼受其本身重力作用而下垂。发动机开车后,旋翼开始旋转,桨叶向上抬,直观地看,形成一个倒立的锥体,称为旋翼锥体,同时在桨叶上产生向上的升力。随着旋翼转速的增加,升力逐渐增大。当升力超过重力时,直升机即铅垂上升(图;若升力与重力平衡,则悬停于空中;若升力小于重力,则向下降落。 旋转旋翼桨叶所产生的拉力和需要克服阻力产生的阻力力矩的大小,不仅取决于旋翼的转速,而且取决于桨叶的桨距。从原理上讲,调节转速和桨距都可以调节拉力的大小。但是 桨毂旋转面 桨毂旋转轴线 前缘 后缘 b ? α V 图 直升机的旋翼 (a) (b)
直升飞机构造及飞行原理
直升飞机构造及飞行原理构造简图
直升机的前飞 直升机的前飞,特别是平飞,是其最基本的一种飞行状态。直升机作为一种运输工具,主要依靠前飞来完成其作业任务。为了更好地了解有关直升机前飞时的飞行特点,从无侧滑的等速直线平飞人手,有关上升率Vy不为零的前飞(上升和下降)留在下一节介绍。直升机的水平直线飞行简称平飞。平飞是直升机使用最多的飞行状态,旋翼的许多特点在乎飞时表现得更为明显。直升机平飞的许多性能决定于旋翼的空气动力特性,因此需要首先说明这种飞行状态下直升机的力和旋翼的需用功率。 平飞时力的平衡 相对于速度轴系平飞时,作用在直升机上的力主要有旋空拉力T,全机重力G,机体的废阻力X身及尾桨推力T尾。前飞时速度轴系选取的原则是:X铀指向飞行速度V方向;Y轴垂直于X轴向上为正,2轴按右手法则确定。保持直升机等速直线平飞的力的平衡条件为(参见图2.1—43) 。 平飞时力的平衡 X轴:T2=X身 Y轴:T1=G
Z轴:T3约等于T尾 其中Tl,T2,T3分别为旋翼拉力在X,Y,Z三个方向的分量。对于单旋翼带尾桨直升机,由于尾桨轴线通常不在旋翼的旋转平面内,为保持侧向力矩平衡,直升机稍带坡度角r,故尾桨推力与水平面之间的夹角为y,T尾与T3方向不完全一致,因为y角很小,即cosr约等于1,故Z向力采用近似等号。 平飞需用功率及其随速度的变化 平飞时,飞行速度垂直分量Vv=0,旋翼在重力方向和Z方向均无位移,在这两个方向的分力不做功,此时旋翼的需用功率由三部分组成:型阻功率——P型;诱导功率——P 诱;废阻功率——P废。其中第三项是旋翼拉力克服机身阻力所消耗的功率。 从上图可以看出,旋翼拉力的第二分力T2可平衡机身阻力X身。对旋翼而言,其分力T2在X轴方向以速度V作位移。显然旋翼必须做功,P =T2V或P废=X身V,而机身废阻X身在机身相对水平面姿态变化不大的情况下,其值近似与V的平方成正比,这样废阻功 平飞需用功率随速度的变化 率P废就可以近似认为与平飞速度的三次方成正比,如上图中的点划线③所示。 平飞时,诱导功率为P诱=TV,其中T为旋翼拉力,vl为诱导速度。当飞行重量不变时,近似认为旋翼拉力不变,诱导速度271随平飞速度V的增大而减小,因此平飞诱导功率P诱随平飞速度V的变化如上图中细实线②所示。 平飞型阻功率尸型则与桨叶平均迎角有关。随平飞速度的增加其平均迎角变化不大。所以P型随乎飞速度V的变化不大,如图中虚线①所示。 图中的实线④为上述三项之和,即总的平飞需用功率P平需随平飞速度的变化而变化。它是一条马鞍形的曲线:小速度平飞时,废阻功率很小,但这时诱导功率很大,所以总的乎飞需用功率仍然很大。但比悬停时要小些。在一定速度范围内,随着平飞速度的增加,由于诱导功率急剧下降,而废阻功率的增量不大,因此总的平飞需用功率随乎飞速度的增加呈下降趋势,但这种下降趋势随V的增加逐渐减缓。速度继续增加则由于废阻功率随平飞速度增加急剧增加。平飞需用功率随V的增加在达到平飞需用功率的最低点后增加;总的平飞需用功率随V的变化则呈上升趋势,而且变得愈来愈明显。 直升机的后飞
直升机的发展历史
直升机的发展历史 人类有史以来就向往着能够自由飞行。古老的神话故事诉说着人类早年的飞行梦,而梦想的飞行方式都是原地腾空而起,像现代直升机那样既能自由飞翔又能悬停于空中,并且随意实现定点着陆。例如哪阿拉伯人的飞毯,希腊神的战车,都是垂直起落飞行器。其中最有价值、最具代表性的是中国古代玩具“竹蜻蜓”和意大利人达·芬奇关于垂直起降航空器的画作。 竹蜻蜓有据可查的历史记载于晋朝(265年—420年)葛洪所著的《抱朴子》一书中。它利用螺旋桨的空气动力实现垂直升空,演示了现代直升机旋翼的基本工作原理。《简明不列颠百科全书》第9卷写道:“直升机是人类最早的飞行设想之一,多年来人们一直相信最早提出这一想法的是达·芬奇,但现在都知道,中国人比中世纪的欧洲人更早做出了直升机玩具。”这种玩具于14世纪传到欧洲。“英国航空之父”乔治·凯利(1773年-1857年)曾制造过几个竹蜻蜓,用钟表发条作为动力来驱动旋转,飞行高度曾达27米。 随着生产力的发展和人类文明的进步,直升机的发展史由幻想时期进入了探索时期。欧洲产业革命之后,机械工业迅速倔起,尤其是本世纪初汽车和轮船的发展,为飞
行器准备了发动机和可供借鉴的螺旋桨。经过航空先驱者们勇敢而艰苦的创造和试验,1903年莱特兄弟(Wright brothers)制造的固定翼飞机飞行成功。在此期间,尽管在发展直升机方面,航空先驱们付出了相当的艰辛和努力,但由于直升机技术的复杂性和发动机性能不佳,它的成功飞行比飞机迟了30多年。 20世纪初为直升机发展的探索期,多种试验性机型相继问世。试验机方案的多样性表明了探索阶段的技术不成熟性。经过多年实践,这些方案中只有纵列式和共轴双旋翼式保留了下来,至今仍在应用。双桨横列式方案未在直升机家族中延续,但在倾转旋翼飞机中得到了继承和发展。 俄国人尤利耶夫另辟捷径,提出了利用尾桨来配平旋翼反扭矩的设计方案并于1912年制造出了试验机。这种单旋翼带尾桨式直升机成为至今最流行的形式。 20世纪初的努力探索为直升机发展积累了宝贵的经验并使直升机的设计取得了显著进展,有多架试验机实现了短暂的垂直升空和短距飞行,但离实用还有很大距离。 飞机工业的发展,使航空发动机的性能迅速提高,这为直升机设计的成功提供了重要条件。旋翼技术的第一次突破,归功于西班牙人Ciervao,他为了解决固定翼飞机的安全问题创造了“不失速”的飞机,这种飞机采用自转旋
直升机飞行操控的基本原理
直升机飞行操控的基本原理
图 1 直升机飞行操纵系统- 概要图 (a)
(b) 图2 直升机操纵原理示意图 1.改变旋翼拉力的大小 2.改变旋翼拉力的方向 3.改变尾桨的拉力 飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。 一、周期变距操纵系统 周期操纵系统用于操纵旋翼桨叶的桨距周期改变。当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。 纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。 周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)
(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。 1.右侧周期变距操纵杆3.左侧周期变距操纵杆 2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件1 3.总距拉杆1 4.与复合摇臂相连接的拉杆1 5.伺服机构1 6.伺服机构(横滚+总距)1 7.伺服机构(俯仰+总距)1 8. 可调拉杆 图 3 直升机周期变距操纵系统 (一)纵向操纵情况 当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固