激光加工工艺参数对照表

激光加工工艺参数对照表
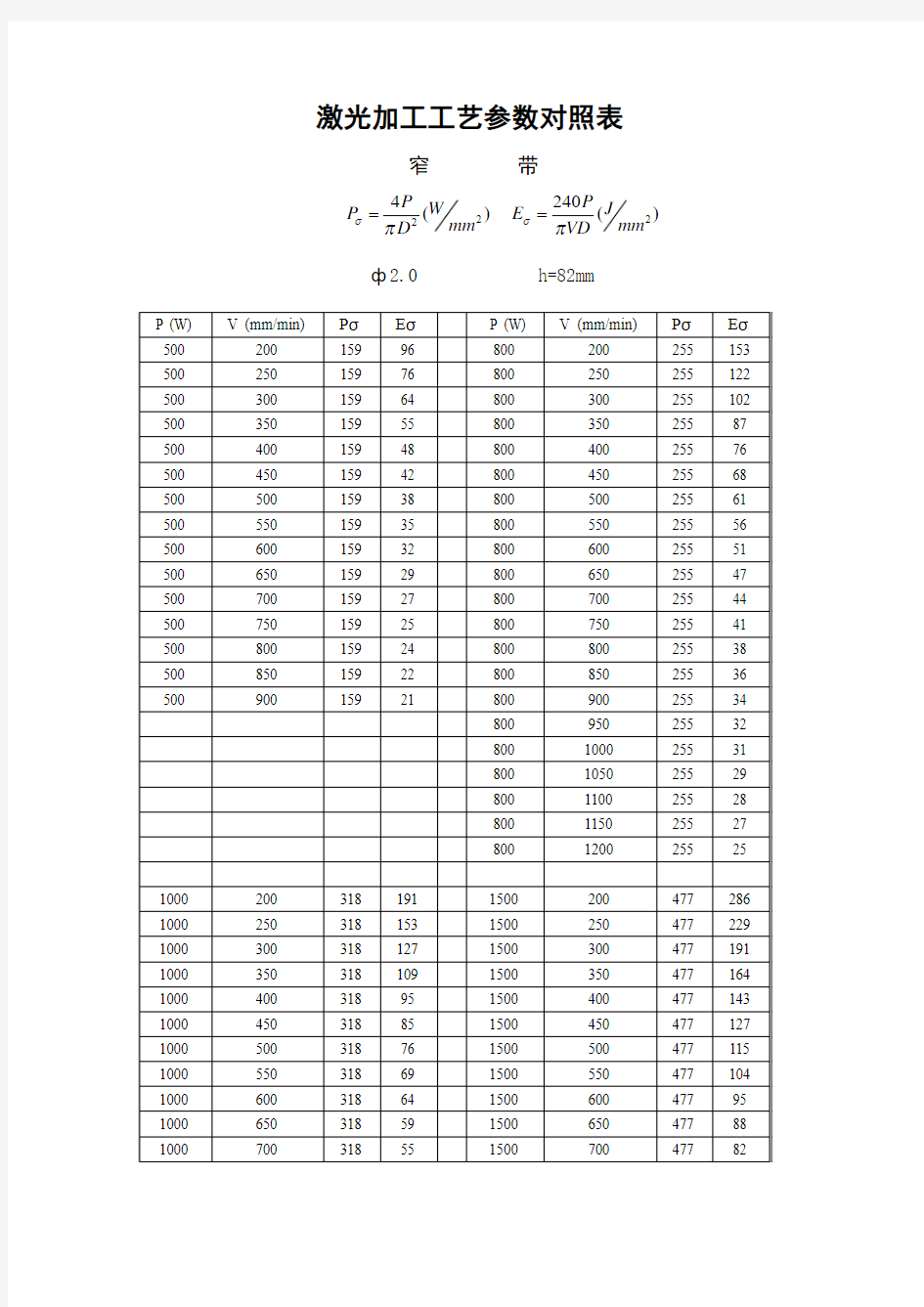
窄 带
224()P W P mm D σπ=
2240()P J
E mm
VD σ
π=
ф2.0 h=82mm
宽 带
10×2 h=205 mm
2()P W P mm σ= 260()P J E mm σ
=
THT 试验参数
2()v nr cm s π= 500s m =
激光切割机技术参数...
FIBERBLADE Cutting System 光纤激光切割机 一、Messer激光切割系统介绍 1、机器原理 梅塞尔公司在工业用激光切割机的开发和制造领域已有近40年的经验. 其激光技术得到 了世界范围的认可, 并在许多不同领域得到应用. 划时代的技术发展, 如专利激光切割头, 表明了梅塞尔公司的技术能力. 在此领域为激光加工建立的新标准将为客户带来巨大的利益. 产品系列包括: 2维激光切割系统 3维激光切割系统
激光焊接系统 自动化设备 装料及卸料系统 通过与世界领先的激光器厂商的常年合作, 保证机器与激光的最佳组合. 其大激光功率及用户友好式的CNC数控系统适应高速切割及广泛的生产制造领域. Fiberblade具备良好的动态性能, 在宽广范围内可实现切割与零件重量无关的高精度无挂渣的成品零件. 机器配合编程软件及相应自动套料程序, 可实现快速高效的零件编程, 扩展机器应用. 应用激光束作为工具, 切割速度快, 成品部件割缝窄, 精度高. 可无困难地实现复杂轮廓的切割. 切口边缘光洁、无毛刺, 绝大多数场合下无需后续处理. Fiberblade主要应用领域为金属加工, 特别是碳钢、不锈钢和铝材. 该系统既可应用氧气切割, 也可采用保护气体实现高压切割. 经测试其可切割性后, 该系统可切割金属合金、塑料以及非金属材料机器设计理念除了实现最佳切割结果外, 同样关注环境保护问题. 采用抽烟除尘装置可满足最严格的排放标准. 机器可满足现有安全规程, 满足相关CE标准. 2、功能描述
Fiberblade激光切割机,是一个集最新动力工程,电脑数控和光纤激光器技术的全新技术 发展水平的设计它是市面上最先进的紧凑型中规格工业级光纤激光切割系统;无需激光器 维护的低维修费系统,高效率、低功耗。 机器工作台采用交换式工作台系统,减少上料时间. 该系统交替使用两块台面. 切割一块台面上的板材, 同时另一块台面位于工作区域外. 操作员可取下成品部件并换上新板, 机器同时进行切割. 另一台面上的工件完成后, 由工作区域换出, 新板就位. 板材置于工作台支架上并确定位置后, 切割头随垂直定位轴下降. 传感控制器保证切割头维持正确定位, 可避免板材变形引起的问题. 激光束通过光纤传输到切割头上, 然后由透镜聚焦. 切割头沿工件轮廓移动, 但不与工件接触, 激光束和切割气体通过割嘴聚集到工件上. 横向运动通过溜板滑动定位实现. 纵向运动由车架自行移动实现. 两套同步驱动伺服电机确保设备的高精度, 轴向运动的高加速度, 可变激光功率控制, 可切割如窄条, 尖角等的复杂图形部件. 通过CNC数控系统可自动设定切割参数如气体种类, 气体压力, 激光参数. CNC数控系统内的切割数据及图形数据的分离, 可实现快速变化的工作要求, 并增加机器功能的灵活性, 适用范围更广. 由随动式直接抽风系统, 把切割过程中产生的尘粒抽出, 并经过烟尘过滤后, 达到安全及环境规范的排放要求. 二、标准配置介绍 1、机器构造
数控加工参数表
一、主轴转速n(r/min) 主轴转速一般根据切削速度V来选定,计算公式为:n=1000V/(π×d) 式中,d为刀具直径(mm),V为刀具切削速度(m/min)。 对于球头铣刀,工作直径要小于刀具直径,故其实际转速应大于计算转速n。表1铣刀的切削速度V 二、进给速度V f (mm/min) V f = f z ×z×n式中n为主轴转速,z为铣刀齿数,f z为每齿进给量(mm/ 齿). 每齿进给量f z 的选取主要取决于工件材料的力学性能、刀具材料、工件 表面粗糙度等因素。工件材料的强度和硬度越高,f z 越小;反之则越大。硬质合 金铣刀的每齿进给量高于同类高速钢铣刀。工件表面粗糙度要求越高,f z 就越小。1.铣削加工 表2 铣刀每齿进给量f z
攻螺纹前底孔直径的确定: 攻米制螺纹螺距P<1mm:d0=d-P P>1mm:d0=d-(1.04~1.06)P 式中P —螺距(mm) d0 —钻头直径(mm) d—螺纹公称直径(mm) 攻不通孔螺纹 钻孔深度=所需螺孔深度-0.7 d
表7 用高速钢钻头钻孔切削用量
5、铰孔加工 铰孔属于精加工工序,加工过程中应合理选择铰刀的类型及材质,高速钢铰刀属于通用铰刀,硬质合金铰刀一般用于加工钢、铸钢、灰铸铁和冷硬铸铁。为了达到较高的孔径精度和表面质量,应采用较低的切削速度和进给量并合理选择切削液。 铰孔前应留有铰削余量,一般为0.1~0.2mm 底孔直径=铰刀直径-(0.1~0.2)mm 铰削加工时切削速度V取3~15m/min 进给量f取0.05~0.5mm/r 注意:在正式加工之前应试铰,并检验孔径及粗糙度是否符合要求。 三、切削液的选择 注:以上各表是加工中心和数控铣床常用的加工参数,供参考。
激光切割机工艺手册
第一章 激光切割方法 1.1 激光熔化切割 在激光熔化切割中,工件被局部熔化后借助气流把熔化的材料喷射出去。因为材料的转移只发生在其液态情况下,所以该过程被称作激光熔化切割。 激光光束配上高纯惰性切割气体促使熔化的材料离开割缝,而气体本身不参于切割。 ——激光熔化切割可以得到比气化切割更高的切割速度。气化所需的能量通常高于把材料熔化所需的能量。在激光熔化切割中,激光光束只被部分吸收。 ——最大切割速度随着激光功率的增加而增加,随着板材厚度的增加和材料熔化温度的增加而几乎反比例地减小。在激光功率一定的情况下,限制因数就是割缝处的气压和材料的热传导率。 ——激光熔化切割对于铁制材料和钛金属可以得到无氧化切口。 ——产生熔化但不到气化的激光功率密度,对于钢材料来说,在104W/cm2~105 W/cm2之间。 1.2 激光火焰切割 激光火焰切割与激光熔化切割的不同之处在于使用氧气作为切割气体。借助于氧气和加热后的金属之间的相互作用,产生化学反应使材料进一步加热。由于此效应,对于相同厚度的结构钢,采用该方法可得到的切割速率比熔化切割要高。 另一方面,该方法和熔化切割相比可能切口质量更差。实际上它会生成更宽的割缝、明显的粗糙度、增加的热影响区和更差的边缘质量。 ——激光火焰切割在加工精密模型和尖角时是不好的(有烧掉尖角的危险)。可以使用脉冲模式的激光来限制热影响。 ——所用的激光功率决定切割速度。在激光功率一定的情况下,限制因数就是氧气的供应和材料的热传导率。 1.3 激光气化切割 在激光气化切割过程中,材料在割缝处发生气化,此情况下需要非常高的激光功率。 为了防止材料蒸气冷凝到割缝壁上,材料的厚度一定不要大大超过激光光束的直径。该加工因而只适合于应用在必须避免有熔化材料排除的情况下。该加工实际上只用于铁基合金很小的使用领域。 该加工不能用于,象木材和某些陶瓷等,那些没有熔化状态因而不太可能让材料蒸气再凝结的材料。另外,这些材料通常要达到更厚的切口。 ——在激光气化切割中,最优光束聚焦取决于材料厚度和光束质量。 ——激光功率和气化热对最优焦点位置只有一定的影响。
激光雷达的基本技术
第二章 激光雷达的基本技术 如前所述,激光雷达的种类繁多、结构各异,其整机形式及体积重量也很不相同。为说明这一特点,图2.1~2.4给出了几种典型的激光雷达外观图。其中,图2.1~2.2为两种大型的激光雷达。而图2.3~2.4则为两种小型激光雷达。尽管如此,对所有的激光雷达而言,有一点是共同的,它们都是 图2.1 NASA 平流层气溶胶Lidar 照片 图2.2 欧共体 ALOMAR Lidar 图 2.3 IAP RMR 激光雷达 图2.4 便携式激光雷达
由发射、接收和信号处理三个主要部分组成。并且再分下去,这三部分又都由激光器、发射光学、接收光学、窄带滤光、通道分光、光电探测器和信号处理电路(通常包括微型计算机)等几个部件组成。此外,在由部件组成激光雷达时,都会涉及发射光束和接收视场的匹配,联调或同步扫描等技术问题。也就是说,在不同的激光雷达中都需要采用一些共同的部件或整机技术。因此,本书在讲述各种具体类型激光雷达之前,先对这些共同的激光雷达部件技术作简要的介绍。 2.1 发射系统技术 2.1.1 发射激光器 激光器用来产生发射激光束,故常称用于激光雷达的激光器为发射激光器。发射激光器是激光雷达中最为重要的技术部件,它的质量往往在很大程度上决定了激光器的探测性能。对用于激光雷达的激光器,通常有如下要求: 1.有较大的输出功率,且大多数都需要工作于脉冲方式,因此相应的要求是脉冲能量大、脉冲重复频率高。 2.激光的光束质量好,特别是要求光束的发散度要小、指向性要好。 3.对于工作于差分吸收或荧光机制的激光雷达,还要求激光输出波长处于特定光谱范围或要求其可以调谐。 4.通常还要求激光器体积、功耗小,性能稳定可靠等,以满足激光雷达多种运载方式的要求。 能基本上满足上述要求的激光器有很多种,范围涵盖了以固体、气体、液体和半导体为工作物质的各种激光器。但是,真正经常用于激光雷达的激光器实际上有少量几种,现分别简介如下:1.Nd:YAG激光器 Nd:YAG激光器是一种典型的固体工作物质的激光器。由于它多方面的优良性能,在激光雷达中获得最为广泛的应用。 Nd:YAG激光器的原理结构示于图2.5。它主要由激光工作物质Nd:YAG棒,由M1和M2两块腔镜组成的激光谐振腔和闪光灯及其电源三个主要部分组成。至于图中的Q开关,它是为了形成窄脉冲输出激光用的,从原理上讲,并不属于Nd:YAG激光器的工作物质、谐振腔和激励源三个必要部分。 图2.5 Nd:YAG激光器
数控铣削加工工艺参数的确定
数控铣削加工工艺参数的确定 确定工艺参数是工艺制定中重要的内容,采用自动编程时更是程序成功与否的关键。 (一)用球铣刀加工曲面时与切削精度有关的工艺参数的确定 1、步长l (步距)的确定 步长l (步距)——每两个刀位点之间距离的长度,决定刀位点数据的多少。 曲线轨迹步长l 的确定方法: 直接定义步长法:在编程时直接给出步长值,根据零件加工精度确定 间接定义步长法:通过定义逼近误差来间接定义步长 2、逼近误差e r 的确定 逼近误差e r ——实际切削轨迹偏离理论轨迹的最大允许误差 三种定义逼近误差方式(如图16-4所示) : 指定外逼近误差值:以留在零件表面上的剩余材料作为误差值 (精度要求较高时一般采用,选为0.0015~0.03mm ) 指定内逼近误差值:表示可被接受的表面过切量 同时指定内、外逼近误差 3、行距S (切削间距)的确定 行距S (切削间距)——加工轨迹中相邻两行刀具轨迹之间的距离。 行距小:加工精度高,但加工时间长,费用高 行距大:加工精度低,零件型面失真性较大,但加工时间短。 两种方法定义行距: (1)直接定义行距 算法简单、计算速度快,适于粗加工、半精加工和形状比较平坦零件的精加工的刀具运动轨迹的生成 (2)用残留高度h 来定义行距 残留高度h ——被加工表面的法矢量方向上两相邻切削行之间残留沟纹的高度。 大:表面粗糙度值大 小:可以提高加工精度,但程序长,占机时间成倍增加,效率降低 选取考虑:粗加工时,行距可选大些,精加工时选小一些。有时为减小刀峰高度,可在原两行之间加密行切一次,即进行曲刀峰处理,这相当于将S 减小一半,实际效果更好些。 (二)与切削用量有关的工艺参数确定 图3.2.6 指定逼近误差
激光切割加工工艺与传统加工工艺的区别
激光切割加工工艺与传统加工工艺的区别 随着钣金加工工艺的飞速发展,加工工艺也是日新月异,给钣金加工带来了许多革命性的理念。作为传统的钣金切割设备,主要有: 1、数控剪床 2、冲床 3、火焰切割 4、等离子切割 5、高压水切割 这些设备在市场上占有相当大的市场份额,一则他们熟为人知,二则价格便宜,虽然他们相对于激光切割等现代工艺来说劣势非常 明显,但他们也各自有自己独特的优势。 数控剪床由于其主要是直线裁剪,虽然能一刀剪长达4米的板材,但它只能用在只需要直线切割的钣金加工上。一般用在板材开平后 裁剪等仅仅需要直线切割的行业中。 冲床在曲线加工上有了更多的灵活性,一台冲床中可以有一套或多套方、圆或其他特殊要求的冲头,可以一次加工出一些特定的钣 金工件,最常见的就是机箱机柜行业,他们要求的加工工艺主要是 直线、方孔、圆孔之类的切割,图案相对简单固定。他们主要面对 的是2mm以下的碳钢板,幅面一般在2.5m×1.25m。厚度在1.5mm 以上的不锈钢由于材质粘度太大比较费模具,一般是不使用冲床的。其优点是对简单图形和薄板加工速度快,缺点是冲厚钢板时能力有限,即使能冲也是工件表面有塌陷,费模具,模具开发周期长,费 用高,柔性化程度不够高。国外超过2mm以上的钢板切割加工一般 都使用更现代的激光切割,而不使用冲床,一则厚钢板冲剪时表面 质量不高,二则冲厚钢板需要更大吨位的冲床,浪费资源,三则冲 厚钢板时噪音太大,不利于环保。
火焰切割作为最初的传统的切割方式由于其投资低,过去对加工质量要求不高,要求太高时再加一道机加工的工序可以解决,市场保有量非常大。现在它主要用来切割超过40mm的厚钢板。它的缺点是切割时热变形太大,割缝太宽,浪费材料,再者加工速度太慢,只适合粗加工。 等离子切割和精细等离子切割跟火焰切割类似,热影响区太大,精度却比火焰切割大许多,速度也有数量级的飞跃,成为了中板加工的主力军。国内顶级的数控精细等离子切割机的实际切割精度的上线已经达到了激光切割的下限,在切割22mm碳钢板时达到了2米多每分钟的速度,且切割端面光滑平整,斜度最好的可控制在1.5度之内,缺点是在切割薄钢板时热变形太大,斜度也较大,在精度要求高时无能为力,消耗品较为昂贵。 高压水切割是利用高速水射流中掺杂金刚砂实行对钣金的切割,它对材质几乎没有限制,切割的厚度也几乎可达100mm以上,对陶瓷、玻璃等用热切割时容易爆裂的材质也可以切割,铜、铝等对激光高反射材料水刀是可以切割的,而激光切割却有较大的障碍。水切割的缺点是加工速度太慢,太脏,不环保,消耗品也较高。 激光切割是钣金加工的一次工艺革命,是钣金加工中的“加工中心”。激光切割柔性化程度高,切割速度快,生产效率高,产品生产周期短,为客户赢得了广泛的市场。激光切割无切削力,加工无变形;无刀具磨损,材料适应性好;不管是简单还是复杂零件,都可以用激光一次精密快速成形切割;其切缝窄,切割质量好、自动化程度高,操作简便,劳动强度低,没有污染;可实现切割自动排样、套料,提高了材料利用率,生产成本低,经济效益好。该技术的有效生命期长,目前在国外超构2毫米的板材大都采用激光切割,许多国外的专家一致认为今后30-40年是激光加工技术发展的黄金时期(是钣金加工发展的方向)。 切割精度是判断数控激光切割机质量好坏的第一要素。影响数控激光切割机的切割精度的四大因素: 1.激光发生器的激光凝聚的大小。聚集之后如果光斑非常小,则切割精度非常高,要是切割之后的缝隙也非常小。则说明激光切割
激光雷达(LiDAR)——参数才是决定激光光源选择的因素
激光雷达(LiDAR)——参数才是决定激光光源选择的因素 对于LiDAR(激光性能考量因素高峰值功率(几十千瓦至几十兆瓦)脉冲(纳秒范围)的固态激光器已用于LiDAR数十年,尺寸、重量、成本、功耗、液体冷却、冲击与自动驾驶车辆LiDAR据ABI Research最近的一项调查显示,到2026年1月,汽车上的LiDAR设备数量将达到6900万部。正如Keopsys集团(拉尼翁,法国)的Frederic Chiquet、研发经理Guillaume Canat和首席执行官Marc le Flohic所解释的那样,现存两类主要的自动驾驶汽车LiDAR系统:3D Flash LiDAR和扫描式LiDAR。Flash LiDAR使用的是广角发射源和广角光学系统(例如鱼眼镜头),将在单个发射过程中获得的反散射光集中于矩阵探测器上,以获得用于模拟车辆周围区域的所有飞行时间(ToF)数据。相反地,扫描式LiDAR可以逐行地处理3D环境;光在每个方向上依次发射,对应的回声由探测器逐个检测。符合用眼安全的激光源必须以脉冲模式工作,光束需强大到能够探测到100米外穿深色衣服的行人,工作温度为-40到85°C,并且可发射出测距精度达10厘米的脉冲。许多LiDAR光源是基于激光二极管,也有非制冷光纤激光器,较激光二极管有诸多的优势,如拥有高功率光束分裂和使用光纤路由到多个传感器位置的能力。使用主振荡器功率放大器(MOPA)结构中,一种典型的1550 nm LiDAR的光纤激光器的脉冲重复率达到5~250 kHz,功率水平分别为10~15 kW和200~300 W。脉冲激光二极管和光纤激光源用于自动驾驶汽车LiDAR的应用对比研究如下。 自动驾驶车辆LiDAR应用中脉冲激光二极管和光纤激光器来源的比较(来源:Keopsys 集团)专用于自动驾驶汽车的脉冲激光二极管是混合器件。激光芯片安装在由MOSFET 晶体管触发的电容器中。每当晶体管的栅极开启时,电容器内积累的电荷就会被释放到芯片中,从而释放出光脉冲。尽管此类型光源的性价比不错,相比昂贵的1550nm InGaAs 光电二极管,其905 nm的输出很容易被硅探测器检测到,但激光二极管具有有限的脉冲重复率和较低的峰值功率,并且受到过热效应的限制。3D Flash LiDAR的激光二极管光源是基于二极管堆叠技术,用几个边缘发射器垂直封装在一起,每层之间均由一层薄的散热
CNC加工参数
MCS(Machine Coordinate System 机械坐标系它是所有刀具路径输出点的基本位置。一旦移动机械坐标系,系统就得重新建立刀具路径输出点。开始时没有对MCS作任何操作的情况下,MCS是和绝对坐标系一致的,并且MCS是被保存在零件文件里的。 RCS(Reference Coordinate System参考坐标系 Link Mcs/Rcs 用于把RCS 和MCS关连起来,令两者重合,(原点位置和坐标轴方向都重合) 1: 水平用于设置刀具进入或退出工件侧面的最大水平安全距离。 2: 直立用于设置刀具进入或退出上一切削高度(或素材平面上方)的最大垂直高度安全距离。 3: 最小用于在设置安全平面高度之前,设置刀具与铣削平面之间的距离。当系统没有定义安全平面,且其水平和垂直安全距离都没有超过此设置值时,系统将把该最小距离作为进刀和退刀的安全距离。 4: 安全平面作为在进行至下一切削区域前,须把刀提到的安全平面,使用时如选择该选项,安全平面高度会与整体安全平面高度相同。 5: 先前平面选择该选项后,系统以上一单节的安全平面,作为在行进至下一切削区域前,须把刀提到的安全平面高度,使用时选择该选项,安全平面高度与上一单节安全平面设置相同。 6: 素材平面选择该选项后,系统以素材的最高平面,作为在行进至下一切削区域前,须把刀提到的安全平面高度。使用时选择该选项,则安全平面高度会与素材平面设置相同。 7: 直接如无指定进刀起始点,系统将直接移动至开始铣削点。 自动类型 1: 当其设置为线性时,系统将产生线性进刀路径。当其设置为圆弧,则产生的进刀路径将沿着圆弧行进,其圆弧半径可由圆弧半径的输入值决定。 2: 激活区间用于设置边界与自动的线性或圆弧的最大距离。在设置它的距离后,系统将计算其相当于刀具横向进给的数目,作为其边界开始铣削点与实际进刀点的距离。 3: 重叠距离用于设置进刀起始点和退刀结束点的相重叠距离。该设置主要用于消除铣削时可能残留于进刀点的残料。 区域排序 标准方式是让系统自行决定切削顺序;优化是根据切削时间上效率最高的顺序进行切削;按进刀点按预钻点分别按定义的起始点和预钻点的顺序进行切削。 自交当切削方式为标准走刀方式时,不管其刀具路径是否产生过切的状态,系统都将依照所设置的刀具路径行走,当其打开时,系统将依照原先设置的刀具路径行进,当其关闭时,则刀具遭遇过切的情形时,系统将会提刀避免过切的区域。 区域连接在用跟随周边跟随工件及配置文件的铣削路径在彼此相连接的铣削区域内,尽量保持不提刀的连续刀具路径。使用时只需选中该选项即可。 边界近似跟随周边跟随工件及配置文件的铣削路径时,减少程序执行时间及缩短刀具路径长度的设置。当边界或岛屿为二次圆锥曲线或B-样条时,可将此设置为打开,以产和较佳的近似边界刀具路径。
激光雷达原理、关键技术及应用的深度解析
激光雷达原理、关键技术及应用的深度解析 “雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等 特征参数。 传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波.可以用 振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。 激光雷达的种类目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: 按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。 按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。 按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。 按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、
激光切割基础知识
激光切割加工基础知识 第一部分 激光切割的原理和功能 一、激光切割的原理 激光切割是由电子放电作为供给能源,通过 He 、N 2、CO 2 等混合气体为激发媒介,利用反射镜组聚焦产生激光光束,从而对材料进行切割。 激光切割的过程:在数控程序的激发和驱动下,激光发生器内产生出特定模式和类型的激光,经过光路系统传送到切割头,并聚焦于工件表面,将金属熔化;同时, 喷嘴从与光束平行的方向喷出辅助气体将熔渣吹走;在由程控的伺服电机驱动下,切割头按照预定路线运动,从而切割出各种形状的工件。 图1:激光切割示意图 二、机床结构 SLCF-X15×40F 数控激光切割机是意大利普瑞玛(PRIMA )工业公司的主导机型——悬臂式飞行光路结构的激光切割机,加工板材尺寸为1500×4000毫米,配有交换工作台。 (一) 该机型的主要特点如下: ● 悬臂式开式结构,可从三个方向上下料,人机接近性极好,可放置超长超宽的 板材。 ● 可移动式切割工作台与主机分离,柔性大。可加装焊接、切管等功能。 ● 精密传动部件不在切割区域内,防护容易,也不会由于工作台及床身切割热变 形影响机床的精度。 ● 从根本上消除了电器双边同步锁产生的误差,避免了横梁的扭动,使得光路稳 定,切割精度提高。 ● 配有高速的Z 轴系统,同时可通过数控系统控制辅助气体的压力、流量等,大 大提高了加工效率。 ● 新型的PM —400V2.0智能化编程软件,具有蛙跳、共边切割、优化套排料、高 效穿孔、尖角处理等功能。 ● 具有先进的多腔分室除尘系统,比单纯的抽风系统除尘效果更高。 1—激光器;2—激光束;3—全反射棱镜;4—聚焦物镜;5—工件;6—工作台
激光雷达回波信号仿真模拟
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
激光切割加工基础知识
激光切割基础知识 第一部分 激光切割的原理和功能 一、激光切割的原理 激光切割是由电子放电作为供给能源,通过 He 、N 2、CO 2 等混合气体为激发媒介,利用反射镜组聚焦产生激光光束,从而对材料进行切割。 激光切割的过程:在数控程序的激发和驱动下,激光发生器内产生出特定模式和类型的激光,经过光路系统传送到切割头,并聚焦于工件表面,将金属熔化;同时, 喷嘴从与光束平行的方向喷出辅助气体将熔渣吹走;在由程控的伺服电机驱动下,切割头按照预定路线运动,从而切割出各种形状的工件。 图1:激光切割示意图 二、机床结构 SLCF-X15×40F 数控激光切割机是意大利普瑞玛(PRIMA )工业公司的主导机型——悬臂式飞行光路结构的激光切割机,加工板材尺寸为1500×4000毫米,配有交换工作台。 (一) 该机型的主要特点如下: ● 悬臂式开式结构,可从三个方向上下料,人机接近性极好,可放置超长超宽的 板材。 ● 可移动式切割工作台与主机分离,柔性大。可加装焊接、切管等功能。 ● 精密传动部件不在切割区域内,防护容易,也不会由于工作台及床身切割热变 形影响机床的精度。 ● 从根本上消除了电器双边同步锁产生的误差,避免了横梁的扭动,使得光路稳 定,切割精度提高。 ● 配有高速的Z 轴系统,同时可通过数控系统控制辅助气体的压力、流量等,大 大提高了加工效率。 1234561—激光器;2—激光束;3—全反射棱镜;4—聚焦物镜;5—工件;6—工作台
●新型的PM—400V2.0智能化编程软件,具有蛙跳、共边切割、优化套排料、高 效穿孔、尖角处理等功能。 ●具有先进的多腔分室除尘系统,比单纯的抽风系统除尘效果更高。 (二)机床的结构主要由以下几部分组成: 1、床身 全部光路安置在机床的床身上,床身上装有横梁、切割头支架和切割头工具,通过特殊的设计,消除在加工期间由于轴的加速带来的振动。机床底部分成几个排气腔室,当切割头位于某个排气室上部时,阀门打开,废气被排出。通过支架隔架,小工件和料渣落在废物箱内。 2、工作台 移动式切割工作台与主机分离,柔性大,可加装焊接、切管等功能。配有两张1.5米×4米的工作台可供交换使用,当一个工作台在进行切割加工的同时,另一张工作台可以同时进行上下料操作,有效提高工作效率。两个工作台可通过编程或按钮自动交换。 工作台下方配有小车收集装置,切割的小料及金属粉末会集中收集在小车中。 3、切割头 是光路的最后器件,其内置的透镜将激光光束聚焦,标准切割头焦距有 5 英寸和 7.5 英寸(主要用于割厚板)两种。良好的切割质量与喷嘴和工件的间距有关,本机切割头使用德国PRECITEC公司生产的非接触式电容传感头,在切割过程中可实现自动跟踪与修正工件表面与喷嘴的间距,调整激光焦距与板材的相对位置,以消除因被切割板材的不平整对切割材料造成的影响。自动找准材料的摆放位置(红光指示器)。 4、控制系统 控制系统包括数控系统(集成可编程序控制器PLC)、电控柜及操作台。PMC-1200数控系统由32位CPU控制单元、数字伺服单元、数字伺服电机、电缆等组成,采用全中文才做界面,10.4"彩色液晶显示器,能实现机外编程计算机与机床的控制系统进行数据传输通讯(具有232接口),具有加速、突变限制;具有图形显示功能,可对激光器的各种状态进行在线和动态控制功能。 5、激光控制柜 控制和检查激光器的功能,并显示系统的压力、功率、放电电流和激光器的运行模式。 6、激光器 采用原装进口德国ROFIN公司SLAB3000W型激光发生器,是目前世界先进的RF 激励板式放电的二氧化碳激光器。其心脏是谐振腔, 激光束就在这里产生,激光气体是由二氧化碳﹑氮气﹑氦气的混合气体,通过涡轮机使气体沿谐振腔的轴向高速运动,气体在前后两个热交换器中冷却,以利于高压单元将能量传给气体。 7、冷却设备 冷却激光器、激光气体和光路系统。 8、除尘装置 内置管道及风机,改善了工作环境。切割区域内装有大通径除尘管道及大全压的离心式除尘风机,加之全封闭的机床床身及分段除尘装置,具有较好的除尘效果。 9、供气系统 包括气源、过滤装置和管路。气源含瓶装气和压缩空气(空气压缩机、冷干机)。
激光切割机工艺手册
第一章激光切割方法 1.1 激光熔化切割 在激光熔化切割中,工件被局部熔化后借助气流把熔化的材料喷射出去。因为材料的转移只发生在其液态情况下,所以该过程被称作激光熔化切割。 激光光束配上高纯惰性切割气体促使熔化的材料离开割缝,而气体本身不参于切割。 ——激光熔化切割可以得到比气化切割更高的切割速度。气化所需的能量通常高于把材料熔化所需的能量。在激光熔化切割中,激光光束只被部分吸收。 ——最大切割速度随着激光功率的增加而增加,随着板材厚度的增加和材料熔化温度的增加而几乎反比例地减小。在激光功率一定的情况下,限制因数就是割缝处的气压和材料的热传导率。 ——激光熔化切割对于铁制材料和钛金属可以得到无氧化切口。 ——产生熔化但不到气化的激光功率密度,对于钢材料来说,在104W/cm2~105 W/cm2之间。 1.2 激光火焰切割 激光火焰切割与激光熔化切割的不同之处在于使用氧气作为切割气体。借助于氧气和加热后的金属之间的相互作用,产生化学反应使材料进一步加热。由于此效应,对于相同厚度的结构钢,采用该方法可得到的切割速率比熔化切割要高。 另一方面,该方法和熔化切割相比可能切口质量更差。实际上它会生成更宽的割缝、明显的粗糙度、增加的热影响区和更差的边缘质量。 ——激光火焰切割在加工精密模型和尖角时是不好的(有烧掉尖角的危险)。可以使用脉冲模式的激光来限制热影响。 ——所用的激光功率决定切割速度。在激光功率一定的情况下,限制因数就是氧气的供应和材料的热传导率。 1.3 激光气化切割 在激光气化切割过程中,材料在割缝处发生气化,此情况下需要非常高的激光功率。 为了防止材料蒸气冷凝到割缝壁上,材料的厚度一定不要大大超过激光光束的直径。该加工因而只适合于应用在必须避免有熔化材料排除的情况下。该加工实际上只用于铁基合金很小的使用领域。 该加工不能用于,象木材和某些陶瓷等,那些没有熔化状态因而不太可能让材料蒸气再凝结的材料。另外,这些材料通常要达到更厚的切口。
三维激光切割加工
三维激光切割加工 性能参数 耗电耗材: 系统耗电:<8KW(根据选配激光器功率大小而异) 零星耗材:<0.5元/小时(包括高功率激光器水冷系统的滤芯、切割头气嘴和切割头保护镜片) 吹气费用:<6元/小时(以用纯氧辅助切割2MM内碳钢为例) 三维切割系统的技术优势: 1.因为采用了业内最高精度的史陶比尔机械手,本体较轻,切割速度快,在小弧度的精细切割和大边的高速切割方面具有明显优势,实际切割速度可以达到18米/分钟而无抖动,综合加工效率是其他品牌机械手组合的两倍,性价比高,还可以节约一组的耗材和人工,后期可以少追加设备也能满足产能要求。还可24小时持续工作。一次性投入相对较少,在一个很短的折旧期内(两班8小时工作制),史陶比尔机器人激光解决方案就可回收投资。同时能耗少,体积小,维护需求低。 2.切割精度高。采用史陶比尔专利齿轮减速系统JCS和JCM,独一无二的驱动技术,确保了无可匹敌的轨迹控制精度和速度。即使是要求极高的小圆,或复杂立体几.何图形的加工,也可精确和快速完成,从而提升您的产品品质。系统重复定位精度高达±0.05M,完全可以满足钣金件行业的精度需求。可切割直径小至2MM的小圆,切割效果圆滑美观,目测无形变和毛刺。 3.切割幅面大,实际死角小。选配臂长2.01米的机械手,除了实现直径达3米的半球形三维加工区域外,还可实现较大的二维平面切割,配合我公司配套生产的可移动工作台2.5mX5m(2m 的运动行程),可实现2mX5m的二维平面切割。 4. 根据实际需要选配离线编程软件,可读取UG,SOLIDWORK等三维作图软件导出的 vda,igs,x_t,sldprt,prt,stp,ipt,par等格式的数模,修改后直接生成切割轨迹,代替人工示教,简单易用。 5. 工业控制理念,模块化设计,全系统的防护等级为IP55,机械手防护等级更是高达IP65,系统集成度高,故障少,抗冲击振动,抗灰尘,无须光学调整或维护,真正适合于工业加工领域的应用用于恶劣的激光环境。结构坚固,动态性更佳。而其他同类产品为简单集成,设备的稳定性较差。 6.系统的工艺性和易用性较好。简单而功能强大的史陶比尔激光专用标准软件LasMAN基于Windows操作系统,用户界面简单友好,集成了机器人运动控制、激光控制、数据处理和产品管理等功能。友好的人机界面,模块化的设计,使得操作者仅需经过简单的培训即可达到系统产能最大化,同时也易于集成。这就大大降低了对操作工人的要求,降低了对工人的管理难度。
国产激光雷达性能参数
激光雷达最早的定义是LIDAR,英文为Light Deteation and Ranging,中文意思是「光的探测和测距」。 其实更准确的一个定义是LADAR:LAser Detection and Ranging,即「激光的探测和测距」。这是在2004 年提出的定义,更符合激光雷达的概念。 激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显: 1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率; 2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标; 3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像; 4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。 但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。 激光雷达在无人驾驶中的功能: 第一是路沿检测,也包括车道线检测; 第二是障碍物识别,对静态物体和动态物体的识别; 第三是定位以及地图的创建。 一款好的激光雷达设备都有哪些评判标准呢? “单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下: 线束…………16线 波长…………905nm 激光等级…………class 1 精度…………±2cm(典型值) 测距…………20cm~150m(目标反射率40%) 出点数…………320,000pts/s 垂直测角…………30° 垂直角分辨率………… 2.0o 水平测角…………360o 水平角分辨率…………0.1o至0.4o 转速…………300-1200rpm (5-20Hz) 输入电压…………9-32VDC 产品功率…………9w(典型值) 防护安全级别…………IP67 操作温度…………-10~60°C 规格…………H:82.7mm*φ:109mm 重量…………0.84kg(不包含数据线) 采集数据…………三维空间坐标/反射率 激光雷达生产复杂,价格高昂也是行业普遍面对的问题 通过深圳在高端制造商的积累解决这个问题。4月18日,速腾宣布已经投入20多条生产线来量产多线激光雷达,并且预计1个季度后达到100条以上的产线规模。 线数越高,价格越高。同理,通过耦合方案达到想要的线数,这样的话,比 2线、64线的价格要有优势。 激光雷达行业供货周期长 速腾聚创激光雷达供货周期在4周以内,快了很多。
激光切割加工基础知识.docx
实用标准 激光切割基础知识 第一部分激光切割的原理和功能 一、激光切割的原理 激光切割是由电子放电作为供给能源,通过 He 、N 2、CO 2等混合气体为激 发媒介,利用反射镜组聚焦产生激光光束,从而对材料进行切割。 激光切割的过程:在数控程序的激发和驱动下,激光发生器内产生出特定模 式和类型的激光,经过光路系统传送到切割头,并聚焦于工件表面,将金属熔化; 同时 , 喷嘴从与光束平行的方向喷出辅助气体将熔渣吹走;在由程控的伺服电机 驱动下,切割1头按照预定路线运2动,从而切3割出各种形状的工件。 4 5 61—激光器;2—激光束; 3—全反射棱镜;4—聚焦物镜; 5—工件;6—工作台 图 1 :激光切割示意图 二、机床结构 SLCF-X15 ×40F 数控激光切割机是意大利普瑞玛(PRIMA )工业公司的主导 机型——悬臂式飞行光路结构的激光切割机,加工板材尺寸为1500 ×4000 毫米, 配有交换工作台。 (一)该机型的主要特点如下: 悬臂式开式结构,可从三个方向上下料,人机接近性极好,可放置超长超宽的 板材。 可移动式切割工作台与主机分离,柔性大。可加装焊接、切管等功能。 精密传动部件不在切割区域内,防护容易,也不会由于工作台及床身切割热变 形影响机床的精度。 从根本上消除了电器双边同步锁产生的误差,避免了横梁的扭动,使得光路稳 定,切割精度提高。 配有高速的 Z轴系统,同时可通过数控系统控制辅助气体的压力、流量等,大
高效穿孔、尖角处理等功能。 具有先进的多腔分室除尘系统,比单纯的抽风系统除尘效果更高。 (二)机床的结构主要由以下几部分组成: 1、床身 全部光路安置在机床的床身上,床身上装有横梁、切割头支架和切割头工具,通过特殊的设计,消除在加工期间由于轴的加速带来的振动。机床底部分成几个 排气腔室,当切割头位于某个排气室上部时,阀门打开,废气被排出。通过支架 隔架,小工件和料渣落在废物箱内。 2、工作台 移动式切割工作台与主机分离,柔性大,可加装焊接、切管等功能。配有两 张1.5 米×4米的工作台可供交换使用,当一个工作台在进行切割加工的同时, 另一张工作台可以同时进行上下料操作,有效提高工作效率。两个工作台可通过 编程或按钮自动交换。 工作台下方配有小车收集装置,切割的小料及金属粉末会集中收集在小车中。 3 、切割头 是光路的最后器件,其内置的透镜将激光光束聚焦,标准切割头焦距有 5 英寸和 7.5 英寸 (主要用于割厚板 )两种。良好的切割质量与喷嘴和工件的间距有关,本机切割头使用德国 PRECITEC公司生产的非接触式电容传感头,在切割过程中可实现自动跟踪与修正工件表面与喷嘴的间距,调整激光焦距与板材的相对位置,以消除因被切割板材的不平整对切割材料造成的影响。自动找准材料的摆 放位置(红光指示器)。 4 、控制系统 控制系统包括数控系统(集成可编程序控制器 PLC)、电控柜及操作台。 PMC-1200 数控系统由 32 位 CPU控制单元、数字伺服单元、数字伺服电机、电缆等组成,采用全中文才做界面, 10.4" 彩色液晶显示器,能实现机外编程计算机与 机床的控制系统进行数据传输通讯(具有 232 接口),具有加速、突变限制;具 有图形显示功能,可对激光器的各种状态进行在线和动态控制功能。 5、激光控制柜 控制和检查激光器的功能,并显示系统的压力、功率、放电电流和激光器的 运行模式。 6、激光器 采用原装进口德国 ROFIN 公司 SLAB3000W 型激光发生器,是目前世界先进 的RF激励板式放电的二氧化碳激光器。其心脏是谐振腔 , 激光束就在这里产生,激光气体是由二氧化碳﹑氮气﹑氦气的混合气体,通过涡轮机使气体沿谐振腔的轴向高速运动,气体在前后两个热交换器中冷却,以利于高压单元将能量传给气体。 7、冷却设备 冷却激光器、激光气体和光路系统。 8、除尘装置 内置管道及风机,改善了工作环境。切割区域内装有大通径除尘管道及大全 压的离心式除尘风机,加之全封闭的机床床身及分段除尘装置,具有较好的除尘 效果。 9、供气系统 包括气源、过滤装置和管路。气源含瓶装气和压缩空气(空气压缩机、冷干机)。
国产激光雷达性能参数
国产激光雷达性能参数 The manuscript was revised on the evening of 2021
激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。 其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念。 激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显: 1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率; 2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标; 3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像; 4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。 但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能: 第一是路沿检测,也包括车道线检测; 第二是障碍物识别,对静态物体和动态物体的识别; 第三是定位以及地图的创建。 一款好的激光雷达设备都有哪些评判标准呢? “单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。 激光雷达详细的参数如下: 线束………… 16线