自动网格划分专题
自动网格划分详述
具体问题:
对构件进行自动网格划分,很多FEA软件使用者存在较多的疑惑,尤其针对组合构件的网格划分问题,如何使接触部位共节点耦合不太明确,现结合midas FEA V3.3版本,针对与自动网格划分相关操作做一些说明,以及对各种组合结构进行自动网格划分的方法做一个整理。
解决办法:
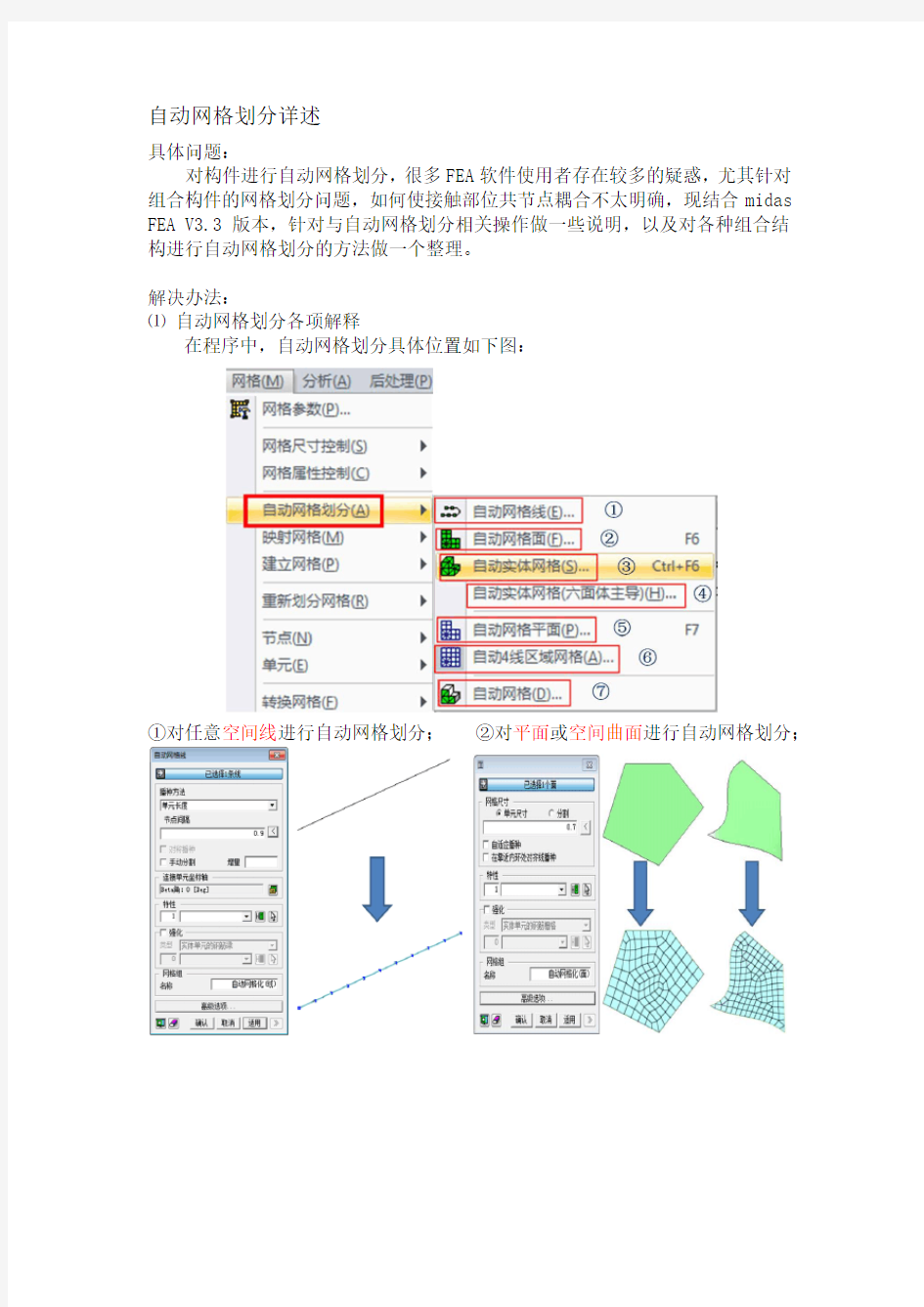
⑴自动网格划分各项解释
在程序中,自动网格划分具体位置如下图:
①对任意空间线进行自动网格划分;②对平面或空间曲面进行自动网格划分;
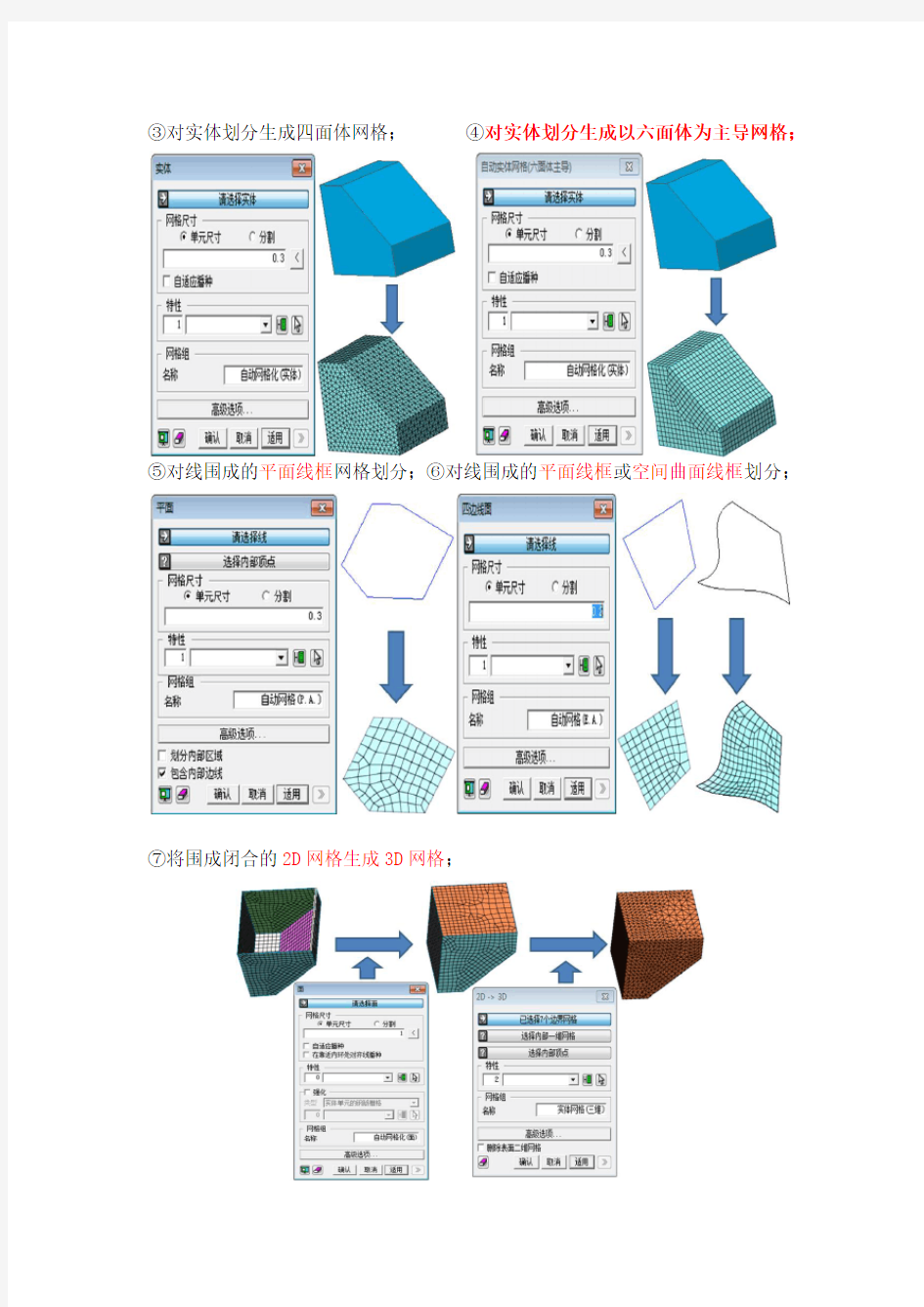
③对实体划分生成四面体网格;④对实体划分生成以六面体为主导网格;
⑤对线围成的平面线框网格划分;⑥对线围成的平面线框或空间曲面线框划分;
⑦将围成闭合的2D网格生成3D网格;
针对右下图每一项做如下说明:
第①项:主要针对空间任意线进行自动网格划分生成线网格单元;
第②项:对空间任意面,生成平面网格单元;
第⑥项:对空间任意闭合线框,生成曲面网格单元;
第⑤项:只能将闭合平面线框进行自动网格划分生成平面网格单元;
第③项:对空间实体进行自动网格划分生成四面体网格单元;
第④项:对空间实体进行自动网格划分生成以六面体为主导的网格单元,其划分原则是,以六面体网格为主导,在不规则部位以五面体金字塔型网格为过度,再加上四面体网格来生成以六面体为主导的网格单元(如下图所示),这是midas FEA软件升级后的新增功能;我们知道,六面体网格的分析计算精度高于四面体网格,提高了计算精度;而且由于六面体网格生成的实体得到的单元数和节点数远少于四面体网格,因此计算速度也优先于四面体网格生成的实体。
第⑦项:此功能应用较少,但有些情况还是能用到。主要是通过闭合2D面网格生成3D实体网格,类似于空间闭合面的填充功能,这里是将闭合面网格填充为实体网格。⑦图反映的就是:将一面开口的空间面网格生成闭合的空间面网格,然后再通过自动网格填充为体网格。
⑵组合构件的自动网格划分
a、线-面接触
可以通过印刻功能将接触部位顶点印刻到曲面上,然后对线与面分别进行自动网格划分;
b、面-实体接触
通过印刻功能将接触部位曲线印刻到实体表面,然后对面与体分别进行网格划分;
这里需要注意:在做完印刻以后,实际上板与实体接触部位有两条线,这时为了保证这两条线能节点耦合,需要做线网格尺寸控制,选择线的时候可以用多段线选择功能()选择这两条线,这里确保分别对面与体进行自动网格划分时在两重合线上共节点。
c、实体-实体接触(完全共面)
对于接触面完全相同的两实体分别直接对其自动网格划分,其接触面节点一定是耦合的(如下图)。
其原因在于自动网格划分>高级选项>,勾选上匹配相邻面后,
程序对相互接触的两个实体进行网格划分时使相邻面节点耦合(如下图所示)。所以,我们不难推出,对于一个复杂构件,用分割实体的功能对其分割,其
分割后两重合面也一定是节点耦合的,因为被分割后的两实体其接触面也是完全一致的。
d、实体-实体接触(不完全共面)
有四种方法实现两构件节点耦合,以下图两接触的构件为例。
方法一、布尔并集()
我们知道,如果不做任何处理,对这两个相互接触的实体进行自动网格划分,必定不能共节点耦合。当这两个构件材料特性完全相同的情况下,可以做并集处理,然后对并集后的整体进行自动网格划分,可以完全耦合。如下图。
这里需要注意:如果构件过于复杂,可能并集后却仍然划分网格失败,这时我们需要尝试用以下三种方法处理。
方法二:布尔差集()(推荐采用)
我们知道,对于大部分组合结构来说,其材料特性是不一致的,因此我们需要分开进行网格划分,采用方法一就不适合了。这里,采用布尔差集,通过差集将两接触面分别在对方表面上形成刻痕,实现节点耦合。但需注意:如果A构件表面包含在B构件表面内(图例构件接触类型),那么只需要布尔差集一次,且为B-A,如下图。如果A构件表面与B构件表面呈相交接触,且交集不为0,那么需要做两次布尔差集,先A-B,再B-A。此目的就是为了保证两接触面分别在对方表面上形成刻痕。
注:这里在做差集时,“删除辅助形状”不要勾选上,这里不勾选,A构件就不会被删除,如果勾选了,A构件就被删除了。
方法三:嵌入实体()
操作和效果与布尔差集类似,但是操作上略比差集麻烦。如下图所示。
这里,在做嵌入操作时,同样不要勾选“删除原形状”,如果勾选后,A构件也就被删除了;但是如果不勾选,原B构件会仍然存在,这里需要将其删除。
方法四:印刻()
这种方法更加适合于线-面、面-面与面-体接触,因为这几种组合不能运用布尔运算。当然,对于体-体接触,也是能运用印刻操作实现耦合的。见下图:
印刻说明:选择“印刻曲线”,“选择形状”选B实体,“选择目标曲面”选择B实体上与A接触的表面,“选择辅助曲线”选择A实体上与B接触的表面上的轮廓线,印刻方向我们可以根据情况选择,如果刚好接触,可以直接选“最短距离方向”。通过印刻,使A构件截面边线刻在B构件表面。最后网格划分实现耦合。
总之:组合构件划分网格后能耦合的原则是:两构件的接触部位有彼此的刻痕。①接触部位为面时,即体的某一面与另一体某一面接触,当A面∩B面=B 面(A面∩B面=A面),则只需将B面边线刻在A面(A面边线刻在B面)上;当A面∩B面=C面≠0,则需将A面边线刻在B面上,同时将B面边线刻在A面上。
②当接触部位为线时,即面的某一边与另一面或一体的表面接触,则需先将边线印刻到面上,再对两条重合的接触线进行线网格尺寸控制,继而网格划分。③当接触部位为点时,即某线的顶点与面接触,则只需将点印刻在面上即可。
Deform网格划分原则及方法 (1)1
[原]Deform网格划分原则及方法 2009-04-04 23:48 引言:划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍网格划分时的一些基本原则及方法。 关键词: Deform 网格局部细化 一、网格划分的原则 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减小。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。 划分疏密不同的网格主要用于应力分析(包括静应力和动应力),在结温度场计算中采用趋于均匀网格。
网格划分的几种基本处理方法
网格划分的几种基本处理方法 贴体坐标法: 贴体坐标是利用曲线坐标,并使其坐标线与燃烧室外形或复杂计算区域边界重合,这样所有边界点能够用网格点来表示,不需要任何插值。一旦贴体坐标生成通过变换,偏微分方程求解可以不在任意形状的物理平面上,而在矩形或矩形的组合(空间问题求解域为长方体或它们的组合)转换平面上进行。这样计算与燃烧室外形无关,也与在物理平面上网格间隔无关。 而是把边界条件复杂的问题转换成一个边界条件简单的问题;这样不仅可避免因燃烧室外形与坐标网格线不一致带来计算误差,而且还可节省计算时间和内存,使流场计算较准确,同时方便求解,较好地解决了复杂形状流动区域的计算,在工程上比较广泛应用。 区域法: 虽然贴体坐标系可以使坐标线与燃烧室外形相重合,从而解决复杂流动区域计算问题。但有时实际流场是一个复杂的多通道区域,很难用一种网格来模拟,生成单域贴体网格,即使生成了也不能保证网格质量,影响流场数值求解的效果。因此,目前常采用区域法或分区网格,其基本思想是,根据外形特点把复杂的物理域或复杂拓扑结构的网格,分成若干个区域,分别对每个子区域生成拓扑结构简单的网格。由这些子区域组合而成的网格,或结构块网格。对区域进行分区时,若相邻两个子域分离边界是协调对接,称为对接网格;若相邻两子域有相互重叠部分,则此分区网格称为重叠网格。根据实际数值模拟计算的需要,把整个区域(燃烧室)分成几个不同的子区域,并分别生成网格。这样不仅可提高计算精度,而且还可节省计算机内存,提高收敛精度。但是计算时,必须考虑各区域连接边界处耦合以及变量信息及时、准确地传递问题。处理各个区域连接有多种方法,其中一个办法是在求解各变量时各区域可以单独求解若干次而对压力校正方程.设压力校正值在最初迭代时为零,为了保证流量连续各个区域应同时求解,然后对各个速度和压力进行校正。或者采用在两个区域交界处有一个重叠区,两个区域都对重叠区进行计算,重叠区一边区域内的值,要供重叠区另一边区域求解时用。或通过在重叠内建立两个区域坐标对应关系,实现数据在重叠区内及时传递。如果两个区采用网格疏密分布不相同,要求重叠区二边流量相等。区域法能合理解决网格生成问题,已被大量用来计算复杂形状区域流动。 区域分解法: 对于复杂几何形状的实际燃烧装置,为了保证数值求解流场质量,目前常采用区域分解法。该法基本要点是:根据燃烧室形状特点和流场计算需要,把计算区域分成一个主区域和若干个子区域,对各个区域(块)分别建立网格,并对各个区域分别进行数值求解。区域分解原则是尽量使每个子区域边界简便以便于网格建立,各个子区域大小也尽可能相同,使计算负载平衡有利于平行计算。各区域的网格间距数学模型以及计算方法都可以不同,通常在变量变化梯度大的区域,可以布置较细网格,并采用高阶紊流模型和描述复杂反应的紊流燃烧模型,以便更合理模拟实际流场。对于变量变化不太大区域,可采用较疏的网格和较简单的数学模型,这样可节省计算时间。各子区域的解在相邻子区域边界处通过耦合条件来实现光滑,相邻子区域连接重叠网格或对接网格来实现,在各子区域交界处通过插值法提供各子域求解变量的信息传递,满足各子域流场计算要求通量和动量守恒条件以便实现在交界面处各子域流场解的匹配和耦合,从而取得全流场解。 非结构网格法: 上述各方法所生成的网格均属于结构化网格,其共同特点是网格中各节点排列有序,每个节点与邻点之间关系是固定的,在计算区域内网格线和平面保持连续。特别是其中分区结构网格生成方法已积累了较多经验,计算技术也较成熟,目前被广泛用来构造复杂外形区域
ansysworkbench中划分网格的几种方法
转自宋博士的博客 如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。我整理了一下,先给出第一个入门篇,说明最基本的划分思路。以后再对某些专题问题进行细致阐述。 ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。 对小圆柱的端面倒角2mm。
退出DM. 3.进入网格划分程序,并设定网格划分方法。双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。(1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。
结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。(2)使用多域扫掠型网格划分。 结果如下
可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。 使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。
?、网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。(4)使用自动网格划分方法。 得到的结果如下图
网格划分实例详细步骤
一个网格划分实例的详解 该题目条件如下图所示: Part 1:本部分将平台考虑成蓝色的虚线 1. 画左边的第一部分,有多种方案。 方法一:最简单的一种就是不用布置任何初始的2dmesh直接用one volume 画,画出来的质量相当不错。 One volume是非常简单而且强大的画法,只要是一个有一个方向可以 mapped的实体都可以用这个方法来画网格,而事实上,很多不能map的单元也都可以用这个命令来画,所以在对三维实体进行网格划分的时候,收件推荐用one volume来试下效果,如果效果不错的话,就没有必要先做二维单元后再来画。 方法二:先在其一个面上生成2D的mesh,在来利用general选项,这样的优点是可以做出很漂亮的网格。
相比之下:方法二所做出来的网格质量要比一要高。 2. 画第二段的网格,同样演示两种方法: 方法一:直接用3D>solid map>one volume 方法二:从该段图形来看,左端面实际上由3个面组成,右端面由一个部分组成,故可以先将左端面的另两个部分的面网格补齐,再用general选项来拉伸,但是,问题是左面砖红色的部分仅为3D单元,而没有可供拉伸的源面网格,故,应该先用face命令生成二维网格后,再来拉伸,其每一步的结果分见下:
在用general选项时,有个问题需要注意:在前面我们说过,source geom和elemes to drag二选一都可以,但是这里就不一样了,因为source geom选面的话,只能选择一个面,而此处是3个面,所以这里只能选elemes to drag而不能选择source geom.
网格划分的方法
网格划分的方法 1.矩形网格差分网格的划分方法 划分网格的原则: 1)水域边界的补偿。舍去面积与扩增面积相互抵消。2)边界上的变步长处理。 3)水、岸边界的处理。 4)根据地形条件的自动划分。 5)根据轮廓自动划分。
2.有限元三角网格的划分方法 1)最近点和稳定结构原则。 2)均布结点的网格自动划分。 3)逐渐加密方法。 35 30 25 20 15 10 5 05101520253035
距离(m)距 离 (m) 3. 有限体积网格的划分方法 1) 突变原则。 2) 主要通道边界。 3) 区域逐步加密。
距离(100m) 离距(100m )距离(100m)离距(100m )
4. 边界拟合网格的划分方法 1) 变换函数:在区域内渐变,满足拉普拉斯方程的边值问题。 ),(ηξξξP yy xx =+ ),(ηξηηQ yy xx =+ 2) 导数变化原则。 ?????? ??????=?????? ??????-ηξ1J y x ,???? ??=ηηξξy x y x J 为雅可比矩阵,??? ? ??--=-ηηξξy x y x J J 11, ξηηξy x y x J -= )22(1 222233ηηξηξηηξηξξηηηηηξξηηξξξηξy y x y y y x y y x x y y x y y x y J xx +-+-+-= 同理可得yy ξ,xx η,yy η。 变换方程为 020222=+++-=+++-)()(ηξηηξηξξηξηηξηξξγβαγβαQy Py J y y y Qx Px J x x x 其中2222,,ξξηξξηηηγβαy x y y x x y x +=+=+=。
网格划分的技巧和策略
在中国CAE论坛上看到这个,挺不错的 壳体单元网格划分时,如果能了解一些网格划分的技巧和策略,将会事半功倍。壳体网格划分可以从3个方面入手:几何模型、划分方法和解决策略。 1 几何模型 可以从以下几个方面了解和处理几何模型问题 (1)了解部件的形状,主要集中在尺寸小的部分。 (2)什么样的特征可以被忽略,例如小的倒角和圆孔。 (3)何种特征对分析是关键的特征,这些特征对确保好的单元质量是需要的。 2 划分方法(自动+手工) 可以采用如下方法 (1)将部件分割为不同的区域。 (2)每个区域必须有可能只使用一种三维网格模式。 (3)寻找下述特点区域:大量生成区域、对称性区域、产生困难的区域。 (4)寻找大量不同区域和方法。 (5)注意什么样的二维网格模式被要求。 (6)观察周围区域:什么功能可以在那里使用。 (7)二维网格模式是否可以延伸到相邻区域中。 (8)寻找对网格模式不能处理位置进行网格划分的方法:如果这样做了,寻找网格可以触及的曲面;注意周围网格将与此模式相融合。 (9)小特征融入大特征中;大特征划分网格时必须考虑到小特征。 (10)注意网格模式。 3 解决策略 壳体网格划分的主要策略如下 (1)内部特征衔接外部特征: l 不能变成被限制的。 l 网格模式需要一个面流入以便它们可以停止 l 从内到外划分网格可以避免此问题。 (2)小特征融入到大特征中:注意模式、大特征划分网格时必须考虑到小特征。 (3)硬特征应当先处理,否则它们会变得难于处理。 (4)通常情况下首先进行大量的生成,后面的编辑是比较容易的。 某些区域比较重要的网格划分的质量要求高些,如力的作用区域,边界条件所在的区域。一些设计区域和离设计区域比较远的地方可以适当放宽要求,但是最好是一些网格性能指标要满足。
网格划分原则
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
网格划分方法
网格划分的几种基本处理方法 学习2010-01-10 17:13:52 阅读48 评论0 字号:大中小 贴体坐标法: 贴体坐标是利用曲线坐标,并使其坐标线与燃烧室外形或复杂计算区域边界重合,这样所有边界点能够用网格点来表示,不需要任何插值。一旦贴体坐标生成通过变换,偏微分方程求解可以不在任意形状的物理平面上,而在矩形或矩形的组合(空间问题求解域为长方体或它们的组合)转换平面上进行。这样计算与燃烧室外形无关,也与在物理平面上网格间隔无关。 而是把边界条件复杂的问题转换成一个边界条件简单的问题;这样不仅可避免因燃烧室外形与坐标网格线不一致带来计算误差,而且还可节省计算时间和内存,使流场计算较准确,同时方便求解,较好地解决了复杂形状流动区域的计算,在工程上比较广泛应 用。 区域法: 虽然贴体坐标系可以使坐标线与燃烧室外形相重合,从而解决复杂流动区域计算问题。但有时实际流场是一个复杂的多通道区域,很难用一种网格来模拟,生成单域贴体网格,即使生成了也不能保证网格质量,影响流场数值求解的效果。因此,目前常采用区域法或分区网格,其基本思想是,根据外形特点把复杂的物理域或复杂拓扑结构的网格,分成若干个区域,分别对每个子区域生成拓扑结构简单的网格。由这些子区域组合而成的网格,或结构块网格。对区域进行分区时,若相邻两个子域分离边界是协调对接,称为对接网格;若相邻两子域有相互重叠部分,则此分区网格称为重叠网格。根据实际数值模拟计算的需要,把整个区域(燃烧室)分成几个不同的子区域,并分别生成网格。这样不仅可提高计算精度,而且还可节省计算机内存,提高收敛精度。但是计算时,必须考虑各区域连接边界处耦合以及变量信息及时、准确地传递问题。处理各个区域连接有多种方法,其中一个办法是在求解各变量时各区域可以单独求解若干次而对压力校正方程.设压力校正值在最初迭代时为零,为了保证流量连续各个区域应同时求解,然后对各个速度和压力进行校正。或者采用在两个区域交界处有一个重叠区,两个区域都对重叠区进行计算,重叠区一边区域内的值,要供重叠区另一边区域求解时用。或通过在重叠内建立两个区域坐标对应关系,实现数据在重叠区内及时传递。如果两个区采用网格疏密分布不相同,要求重叠区二边流量相等。区域法能合理解决网格生成问题,已被大量用来计算复杂形状区域流动。 区域分解法: 对于复杂几何形状的实际燃烧装置,为了保证数值求解流场质量,目前常采用区域分解法。该法基本要点是:根据燃烧室形状特点和流场计算需要,把计算区域分成一个主区域和若干个子区域,对各个区域(块)分别建立网格,并对各个区域分别进行数值求解。区域分解原则是尽量使每个子区域边界简便以便于网格建立,各个子区域大小也尽可能相同,使计算负载平衡有利于平行计算。各区域的网格间距数学模型以及计算方法都可以不同,通常在变量变化梯度大的区域,可以布置较细网格,并采用高阶紊流模型和描述复杂反应的紊流燃烧模型,以便更合理模拟实际流场。对于变量变化不太大区域,可采用较疏的网格和较简单的数学模型,这样可节省计算时间。各子区域的解在相邻子区域边界处通过耦合条件来实现光滑,相邻子区域连接重叠网格或对接网格来实现,在各子区域交界处通过插值法提供各子域求解变量的信息传递,满足各子域流场计算要求通量和动量守恒条件以便实现在交界面处各子域流场解的匹配和 耦合,从而取得全流场解。 非结构网格法: 上述各方法所生成的网格均属于结构化网格,其共同特点是网格中各节点排列有序,每个节点与邻点之间关系是固定的,在计算区域内网格线和平面保持连续。特别是其中分区结构网格生成方法已积累了较多经验,计算技术也较成熟,目前被广泛用来构造复杂外形区域内网格。但是,若复杂外形稍有改变,则将需要重新划分区域和构造网格,耗费较多人力和时间。为此,近年来又发展了另一类网格——非结构网格。此类网格的基本特点是:任何空间区域都被以四面体为单元的网格所划分,网格节点不受结构性质限制,能较好地处理边界,每个节点的邻点个数也可不固定,因此易于控制网格单元的大小、形状及网格的位置。与结构网格相比,此类网格具有更大灵活性和对复杂外形适应性。在20世纪80年代末和90年代初,非结构网格得到了迅速发展。生成非结构网格方法主要有三角化方法和推进阵面法两种。虽然非结构网格容易适合复杂外形,但与结构网格相比还存在一些缺点:(1)需要较大内存记忆单元节点之
workbench网格划分的_很实用的讲解
ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。对小圆柱的端面倒角2mm。 退出DM. 3.进入网格划分程序,并设定网格划分方法。 双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。 (1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。 结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。 (2)使用多域扫掠型网格划分。 结果如下 可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。
使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。 、 网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。 (4)使用自动网格划分方法。 得到的结果如下图 该方法实际上是在四面体网格和扫掠网格之间自动切换。当能够扫掠时,就用扫掠网格划分;当不能用扫掠网格划分时,就用四面体。这里不能用扫掠网格,所以使用了四面体网格。(5)使用六面体主导的网格划分方法。 得到的结果如下 该方法在表面用六面体单元,而在内部也尽量用六面体单元,当无法用六面体单元时,就用四面体单元填充。由于四面体单元相对较差,所以它比较能够保证表面的单元质量。 总体来说,对于空间物体而言,我们应当尽量使用六面体网格。 当对象是一个简单的规则体时,使用扫掠网格划分是合适的; 当对象是对个简单的规则体组成时,使用多域扫掠网格划分是合适的; 接着尽量使用六面体主导的方式,它会在外层形成六面体网格,而在心部填充四面体网格。四面体网格是最后的选择。其中 如果要忽略一些小细节,如倒角,小孔等,则使用patch independent算法; 如果要要考虑一些小细节,则使用patch conforming算法。
workbench网格划分的很实用的讲解
w o r k b e n c h网格划分的 很实用的讲解 Newly compiled on November 23, 2020
如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。我整理了一下,先给出第一个入门篇,说明最基本的划分思路。以后再对某些专题问题进行细致阐述。ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。 对小圆柱的端面倒角2mm。 退出DM. 3.进入网格划分程序,并设定网格划分方法。 双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。 (1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。 结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。 (2)使用多域扫掠型网格划分。 结果如下
可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。 使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。 、 网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。 (4)使用自动网格划分方法。 得到的结果如下图 该方法实际上是在四面体网格和扫掠网格之间自动切换。当能够扫掠时,就用扫掠网格划分;当不能用扫掠网格划分时,就用四面体。这里不能用扫掠网格,所以使用了四面体网格。 (5)使用六面体主导的网格划分方法。 得到的结果如下
ANSYS 网格划分详细介绍
ANSYS 网格划分详细介绍 2008-09-27 18:01 众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。 一、自由网格划分 自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。 二、映射网格划分 映射网格划分是对规整模型的一种规整网格划分方法,其原始概念是:对于面,只能是四边形面,网格划分数需在对边上保持一致,形成的单元全部为四边形;对于体,只能是六面体,对应线和面的网格划分数保持一致;形成的单元全部为六面体。在ANSYS中,这些条件有了很大的放宽,包括: 1 面可以是三角形、四边形、或其它任意多边形。对于四边以上的多边形,必须用LCCAT命令将某些边联成一条边,以使得对于网格划分而言,仍然是三角形或四边形;或者用AMAP命令定义3到4个顶点(程序自动将两个顶点之间的所有线段联成一条)来进行映射划分。 2 面上对边的网格划分数可以不同,但有一些限制条件。 3 面上可以形成全三角形的映射网格。 4 体可以是四面体、五面体、六面体或其它任意多面体。对于六面以上的多面体,必须用ACCAT命令将某些面联成一个面,以使得对于网格划分而言,仍然是四、五或六面体。 5 体上对应线和面的网格划分数可以不同,但有一些限制条件。
各种网格划分方法
各种网格划分方法 1.输入实体模型尝试用映射、自由网格划分,并综合利用多种网格划分控制方法 本题提供IGES 文件 1. 以轴承座为例,尝试对其进行映射,自由网格划分,并练习一般后处理的多种技术,包 括等值图、云图等图片的获取方法,动画等。 2. 一个瞬态分析的例子 练习目的:熟悉瞬态分析过程 瞬态(FULL)完全法分析板-梁结构实例 如图所示板-梁结构,板件上表面施加随时间变化的均布压力,计算在下列已知条件下结构的瞬态响应情况。 全部采用A3钢材料,特性: 杨氏模量=2e112/m N 泊松比=0.3 密度=7.8e33 /m Kg 板壳: 厚度=0.02m 四条腿(梁)的几何特性: 截面面积=2e-42m 惯性矩=2e-84m 宽度=0.01m 高度=0.02m 压力载荷与时间的 关系曲线见下图所示。 图 质量梁-板结构及载荷示意图 0 1 2 4 6 时间(s ) 图 板上压力-时间关系 分析过程 第1步:设置分析标题 1. 选取菜单途径Utility Menu>File>Change Title 。 2. 输入“ The Transient Analysis of the structure ”,然后单击OK 。 第2步:定义单元类型 单元类型1为SHELL63,单元类型2为BEAM4 第3步:定义单元实常数 实常数1为壳单元的实常数1,输入厚度为0.02(只需输入第一个值,即等厚度壳)
实常数2为梁单元的实常数,输入AREA 为2e-4惯性矩IZZ=2e-8,IYY =2e-8宽度TKZ=0.01,高度TKY=0.02。 第5步:杨氏模量EX=2e112/m N 泊松比NUXY=0.3 密度DENS=7.8e33 /m Kg 第6步:建立有限元分析模型 1. 创建矩形,x1=0,x2=2,y1=0,y2=1 2. 将所有关键点沿Z 方向拷贝,输入DZ =-1 3. 连线。将关键点1,5;2,6;3,7;4,8分别连成直线。 4. 设置线的分割尺寸为0.1,首先给面划分网格;然后设置单元类型为2,实常数为2, 对线5到8划分网格。 第7步:瞬态动力分析 1. 选取菜单途径Main Menu>Solution>-Analysis Type-New Analysis ,弹出New Analysis 对话框。 2. 选择Transient ,然后单击OK ,在接下来的界面仍然单击OK 。 3. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Damping , 弹出Damping Specifications 窗口。 4. 在Mass matrix multiplier 处输入5。单击OK 。 5. 选取菜单途径Main Menu > Solution > -Loads-Apply > -Structural- Displacement>On Nodes 。弹出拾取(Pick )窗口,在有限元模型上点取节点232、242、252和262,单击OK ,弹出Apply U,ROT on Nodes 对话框。 6. 在DOFS to be constrained 滚动框中,选种“All DOF ”(单击一次使其高亮度显示, 确保其它选项未被高亮度显示)。单击OK 。 7. 选取菜单途径Utility Menu>Select>Everything 。 8. 选取菜单途径Main Menu>Solution>-Load Step Opts-Output Ctrls>DB/Results File ,弹出Controls for Database and Results File Writing 窗口。 9. 在Item to be controlled 滚动窗中选择All items ,下面的File write frequency 中选择Every substep 。单击OK 。 10. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。 11. 在Time at end of load step 处输入1;在Time step size 处输入0.2;在Stepped or ramped b.c 处单击ramped ;单击Automatic time stepping 为on ;在Minimum time step size 处输入0.05;在Maximum time step size 处输入0.5。单击OK 。 12. 选取菜单途径Main Menu>Solution>-Loads-Apply>-Structure-Pressure>On Areas 。弹出Apply PRES on Areas 拾取窗口。 13. 单击Pick All ,弹出Apply PRES on Areas 对话框。 14. 在pressure value 处输入10000。单击OK 15. 选取菜单途径Main menu>Solution>Write LS File ,弹出Write Load Step File 对 话框。 16. 在Load step file number n 处输入1,单击OK 。 17. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。
ANSYS 网格划分方法总结
(1) 网格划分定义:实体模型是无法直接用来进行有限元计算得,故需对它进行网格划分以生成有限元模型。有限元模型是实际结构和物质的数学表示方法。 在ANSYS中,可以用单元来对实体模型进行划分,以产生有限元模型,这个过程称作实体模型的网格化。本质上对实体模型进行网格划分也就是用一个个单元将实体模型划分成众多子区域。这些子区域(单元),是有属性的,也就是前面设置的单元属性。 另外也可以直接利用单元和节点生成有限元模型。 实体模型进行网格划分就是用一个个单元将实体模型划分成众多子区域(单元)。 (2)为什么我选用plane55这个四边形单元后,仍可以把实体模型划分成三角 形区域集合??? 答案:ansys为面模型的划分只提供三角形单元和四边形单元,为体单元只提供四面体单元和六面体单元。不管你选择的单元是多少个节点,只要是2D单元,肯定构成一个四边形或者是三角形,绝对没有五、六边形等特殊形状。网格划分也就是用所选单元将实体模型划分成众多三角形单元和四边形子区域。 见下面的plane77/78/55都是节点数目大于4的,但都是通过各种插值或者是合并的方式形成一个四边形或者三角形。 所以不管你选择什么单元,只要是对面的划分,meshtool上的划分类型设置就只有tri和quad两种选择。 如果这个单元只构成三角形,例如plane35,则无论你在meshtool上划分设置时tri还是quad,划分出的结果都是三角形。
所以在选用plane55单元,而划分的是采用tri划分时,就会把两个点合并为一个点。如上图的plane55,下面是plane单元的节点组成,可见每一个单元上都有两个节点标号相同,表明两个节点是重合的。 。 同样在采用plane77 单元,进行tri划分时,会有三个节点重合。这里不再一一列出。(3)如何使用在线帮助: 点击对话框中的help,例如你想了解plane35的相关属性,你可以
各种网格的划分方法
第二日练习主题:各种网格划分方法 1.输入实体模型尝试用映射、自由网格划分,并综合利用多种网格划分控制方法 本题提供IGES文件 1.以轴承座为例,尝试对其进行映射,自由网格划分,并练习一般后处理的多种技术,包括等值图、云图等图片的获取方法,动画等。 2.一个瞬态分析的例子 练习目的:熟悉瞬态分析过程 瞬态(FULL)完全法分析板-梁结构实例 如图所示板-梁结构,板件上表面施加随时间变化的均布压力,计算在下列已知条件下结构的瞬态响应情况。 全部采用A3钢材料,特性: 杨氏模量=2e112 N泊松比=0.3 密度=7.8e33 /m /m Kg 板壳:厚度=0.02m 四条腿(梁)的几何特性: 截面面积=2e-42 m宽度=0.01m高度=0.02m m惯性矩=2e-84 压力载荷与时间的关系曲线见下图所示。 图质量梁-板结构及载荷示意图 5000 0 1 2 4 6 时间(s) 图板上压力-时间关系 分析过程 第1步:设置分析标题 1.选取菜单途径Utility Menu>File>Change Title。 2.输入“The Transient Analysis of the structure”,然后单击OK。 第2步:定义单元类型 单元类型1为SHELL63,单元类型2为BEAM4 第3步:定义单元实常数 实常数1为壳单元的实常数1,输入厚度为0.02(只需输入第一个值,即等厚度壳)
实常数2为梁单元的实常数,输入AREA为2e-4惯性矩IZZ=2e-8,IYY=2e-8宽度TKZ=0.01,高度TKY=0.02。 第5步:杨氏模量EX=2e112 N泊松比NUXY=0.3 密度DENS=7.8e33 /m Kg /m 第6步:建立有限元分析模型 1.创建矩形,x1=0,x2=2,y1=0,y2=1 2.将所有关键点沿Z方向拷贝,输入DZ=-1 3.连线。将关键点1,5;2,6;3,7;4,8分别连成直线。 4.设置线的分割尺寸为0.1,首先给面划分网格;然后设置单元类型为2,实常数为2,对线5到8划分网格。 第7步:瞬态动力分析 1.选取菜单途径Main Menu>Solution>-Analysis Type-New Analysis,弹出New Analysis 对话框。 2.选择Transient,然后单击OK,在接下来的界面仍然单击OK。 3.选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Damping,弹出 Damping Specifications窗口。 4.在Mass matrix multiplier处输入5。单击OK。 5.选取菜单途径Main Menu > Solution > -Loads-Apply > -Structural- Displacement>On Nodes。弹出拾取(Pick)窗口,在有限元模型上点取节点232、242、252和262,单击OK,弹出Apply U,ROT on Nodes对话框。 6.在DOFS to be constrained滚动框中,选种“All DOF”(单击一次使其高亮度显示, 确保其它选项未被高亮度显示)。单击OK。 7.选取菜单途径Utility Menu>Select>Everything。 8.选取菜单途径Main Menu>Solution>-Load Step Opts-Output Ctrls>DB/Results File,弹 出Controls for Database and Results File Writing窗口。 9.在Item to be controlled滚动窗中选择All items,下面的File write frequency中选择 Every substep。单击OK。 10.选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time –Time Step,弹出Time – Time Step Options窗口。 11.在Time at end of load step处输入1;在Time step size处输入0.2;在Stepped or ramped b.c处单击ramped;单击Automatic time stepping为on;在Minimum time step size 处输入0.05;在Maximum time step size处输入0.5。单击OK。 12.选取菜单途径Main Menu>Solution>-Loads-Apply>-Structure-Pressure>On Areas。弹 出Apply PRES on Areas拾取窗口。 13.单击Pick All,弹出Apply PRES on Areas对话框。 14.在pressure value处输入10000。单击OK 15.选取菜单途径Main menu>Solution>Write LS File,弹出Write Load Step File 对话框。 16.在Load step file number n处输入1,单击OK。 17.选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time –Time Step,弹出Time – Time Step Options窗口。 18.在Time at end of load step处输入2。单击单击OK。
网格划分及排序方法简介
网格划分及排序方法介绍 1.概述 1.1引入网格的目的 在地理维度的基础上叠加用户维度,综合用户分布、用户行为、终端等方面的分析,通过存量和增量市场等维度查找价值区域,并根据不同区域的价值大小确定建设目标和投资节奏,精准网络投资。 1.2网格与场景及站点的关系 网格颗粒度介于场景与站点之间,其本质是按照价值属性对区域进行聚类。 网格是对市区、县城、行政村等场景的进一步细分,但校园、景区、乡镇镇区专题网格的边界要求与对应的场景边界保持一致,交通干线为独立的网格图层。 网格化思路的引入,形成“场景、网格、站点”三维模型,可提供个体与整体的全方位参考,从而为引导投资方向、提高投资效率、支撑市场发展提供帮助。 1.3网格化思路 1.1.1有效面积与无效面积 全国42%的面积聚集了95%的人口,人口及经济发展呈现不均衡分布情况,所以部分区域(如沙漠、大面积水域、山脉等)建站效益难以保障,于是引入有效面积与无效面积的概念,量化衡量具有建站需求的区域。 图无效覆盖区域示例 有效面积定义如下:
基站覆盖范围内人口密度达到100人/Km2或单站覆盖人口达到2000人的区域(以收支平衡为目标进行测算)所占面积定义为有效面积; 收支平衡测算标准:10*站点年收入 /(建设成本+10*站点年运维成本)≥ 1 计算期为10年,考虑到铁塔公司成立,新增基站配套投资按照1/3计列。 不符合以上标准的的为无效面积。在进行网格划分时首先就要明确有效面积、无效面积各自的区域范围。 1.1.2物理网格与逻辑网格 有效面积为已完成网络覆盖或将要进行覆盖的区域,对于这一部分区域需要进行连续的更细化的网格划分。结合传统的“点、线、面”概念,将地理上连续的栅格化的网格划分称之为“物理网格”,将交通干线定义为“逻辑网格”,如下图所示: 图物理网格与逻辑网格示意图(此图不含无效面积) 需要注意的是,在无效面积区域内也可能有交通干线分布,所以逻辑网格可以在有效面积、无效面积分布,而物理网格只能在有效面积内划分。 1.1.3小结 有效面积、无效面积、物理网格、逻辑网格关系如下图所示: 图各名词概念逻辑关系图 注:本地网面积=本地网有效面积+本地网无效面积 本地网有效面积=本地网所有物理网格面积之和