2018年注册测绘师考试综合能力知识点整理
2018年注册测绘师考试综合能力知识点整理
大地测量
1.1 概论
大地测量参考框架(坐标参考框架、高程参考框架、重力参考框架)是大地测量系统(坐标、高程、深度、重力)的具体应用形式。 时间系统:世界时(UT)、原子时(AT)、力学时(DT)、协调时(UTC)、GPS 时(GPST)。时间系统框架对时间系统的实现,描述一个时间系统框架内容:1采用时间频率基准;2守时系统;3授时系统;4覆盖范围。
二维坐标转换需要4参数,2公共点。三维坐标转换需要7参数,3公共点。
坐标正算:由一条线段的一个端点坐标、线段长及方位角计算另一端点坐标。
坐标反算:由两端点坐标计算线段长和方位角。
高斯正算:由大地坐标(B ,L )计算高斯平面坐标(x ,y )。 高斯反算:由高斯平面坐标(x ,y )计算大地坐标(B ,L )。 大地主题正解:已知一点的大地经纬度以及该点至待求点的大地线长度和大地方位角,计算待求点的大地经纬度和待求点至已知点的大地方位角的解算。
大地主题反解:已知两点的大地经纬度,计算这两点间的大地线长度和正反大地方位角的解算。
1.2 传统大地控制网
第i 测回度盘配置方法L=(i-1)×180/N(N 为测回数)
大地控制三角网精度:首级图根点相对于起算三角点的点位误差≤图上±0.1mm ,相对于地面点的点位中误差≤±0.1Nmm (N 为测图比例尺分母)。
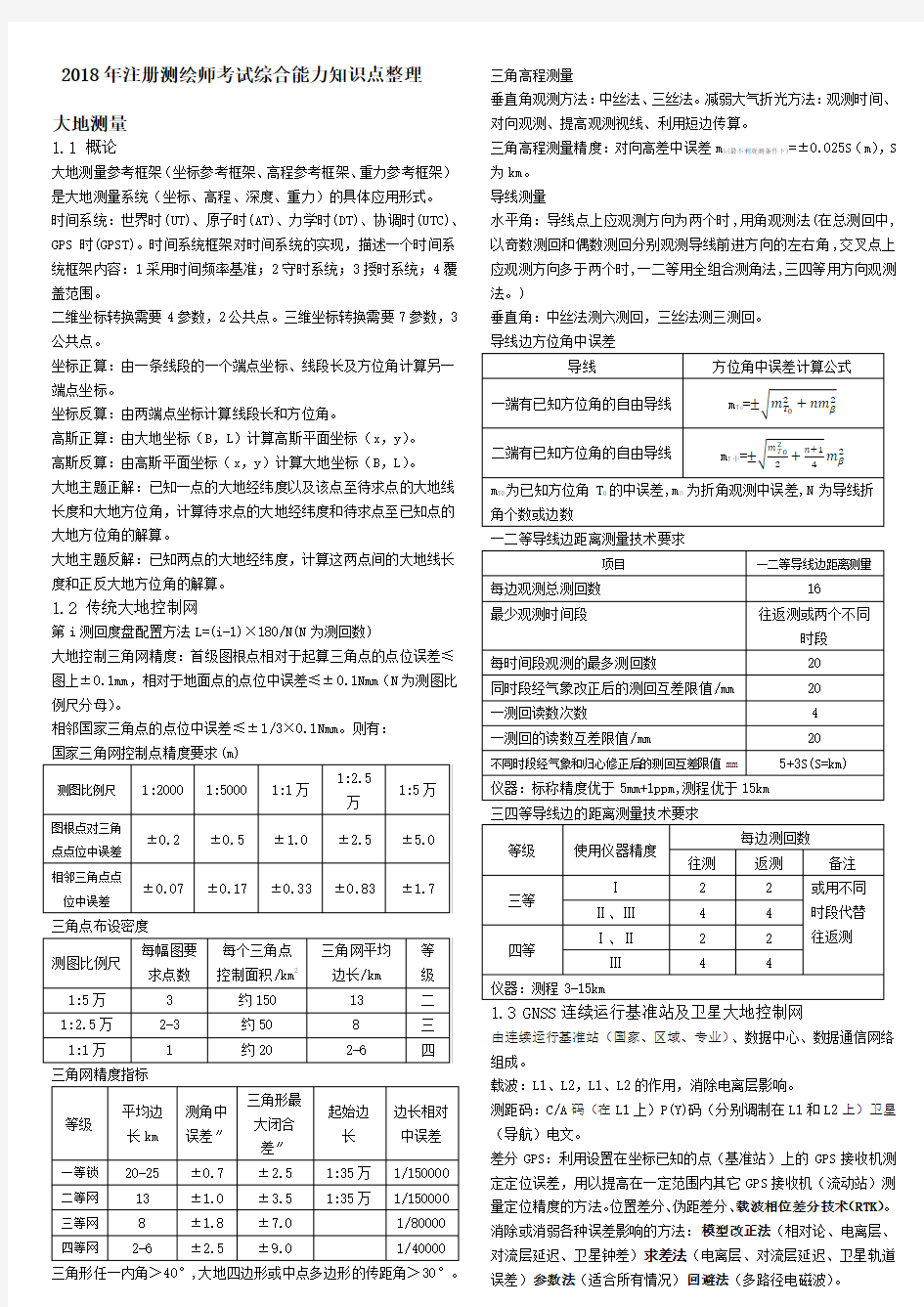
相邻国家三角点的点位中误差≤±1/3×0.1Nmm 。则有: 国家三角网控制点精度要求(m)
三角点布设密度
三角网精度指标
三角形任一内角>40°,大地四边形或中点多边形的传距角>30°。
三角高程测量
垂直角观测方法:中丝法、三丝法。减弱大气折光方法:观测时间、对向观测、提高观测视线、利用短边传算。
三角高程测量精度:对向高差中误差m h(最不利观测条件下)=±0.025S (m ),S 为km 。 导线测量
水平角:导线点上应观测方向为两个时,用角观测法(在总测回中,以奇数测回和偶数测回分别观测导线前进方向的左右角,交叉点上应观测方向多于两个时,一二等用全组合测角法,三四等用方向观测法。)
垂直角:中丝法测六测回,三丝法测三测回。 导线边方位角中误差
一二等导线边距离测量技术要求
三四等导线边的距离测量技术要求
由连续运行基准站(国家、区域、专业)、数据中心、数据通信网络组成。
载波:L1、L2,L1、L2的作用,消除电离层影响。
测距码:C/A 码(在L1上)P(Y)码(分别调制在L1和L2上)卫星(导航)电文。
差分GPS :利用设置在坐标已知的点(基准站)上的GPS 接收机测定定位误差,用以提高在一定范围内其它GPS 接收机(流动站)测量定位精度的方法。位置差分、伪距差分、载波相位差分技术(RTK )。 消除或消弱各种误差影响的方法:模型改正法(相对论、电离层、对流层延迟、卫星钟差)求差法(电离层、对流层延迟、卫星轨道误差)参数法(适合所有情况)回避法(多路径电磁波)。
单差、双差和三差:站间一次差分;站间、星间各求一次差(共两次差);站间、星间和历元间各求一次差(三次差)。
站间求差(站间差分)消除卫星钟差、削弱电离层对流层卫星轨道误差的影响。
星间求差(星间差分)消除了接收机钟差的影响。
历元间求差(历元间差分)消去了整周未知数参数。
单点定位:单独利用一台接收机确定待定点在地固坐标系中绝对位置的方法。
相对定位:确定进行同步观测的接收机之间相对位置的定位方法。基准站间距与定位精度关系
基准站选址:1多路径200m;2有10°以上地平高度角;3微波站等电磁干扰200m;4铁路公路采矿区等震动带;5未来环境变化小;6进行24h实地环境测试,国家和区域数据可用率>85%,多路径<0.5m;7地质稳定、避开易受水淹等区;8区域可建在稳定的屋顶;9便于接入通信网络;10稳定电源;11交通便利;12用地保障;13便于维护保存。
基准站设备(接收机、天线、气象、不间断电源、通信、雷电防护、计算机)要求:
接收机:1同时跟踪24卫星;2有1HZ采样能力;3观测数据包括双频测距码、双频载波相位值、卫星广播星历;4温度-30-+55、湿度95%;5外接频标输入,5或10MHZ;6外接气象仪并存储数据;7有3个以上数据通信接口;8有输出原始数据、导航定位数据、差分修正数据、1PPS脉冲的能力。
天线:1相位<3mm;2扼流圈或抑径板;3抗电磁干扰;4定向指北标志;5温度-40-+65;
气象设备:1连续测定气压(0.1hPa)、温度(±0.5)、湿度(±1%);2可设采样间隔;3实时(定时)数据输出。
1.4 卫星大地控制网
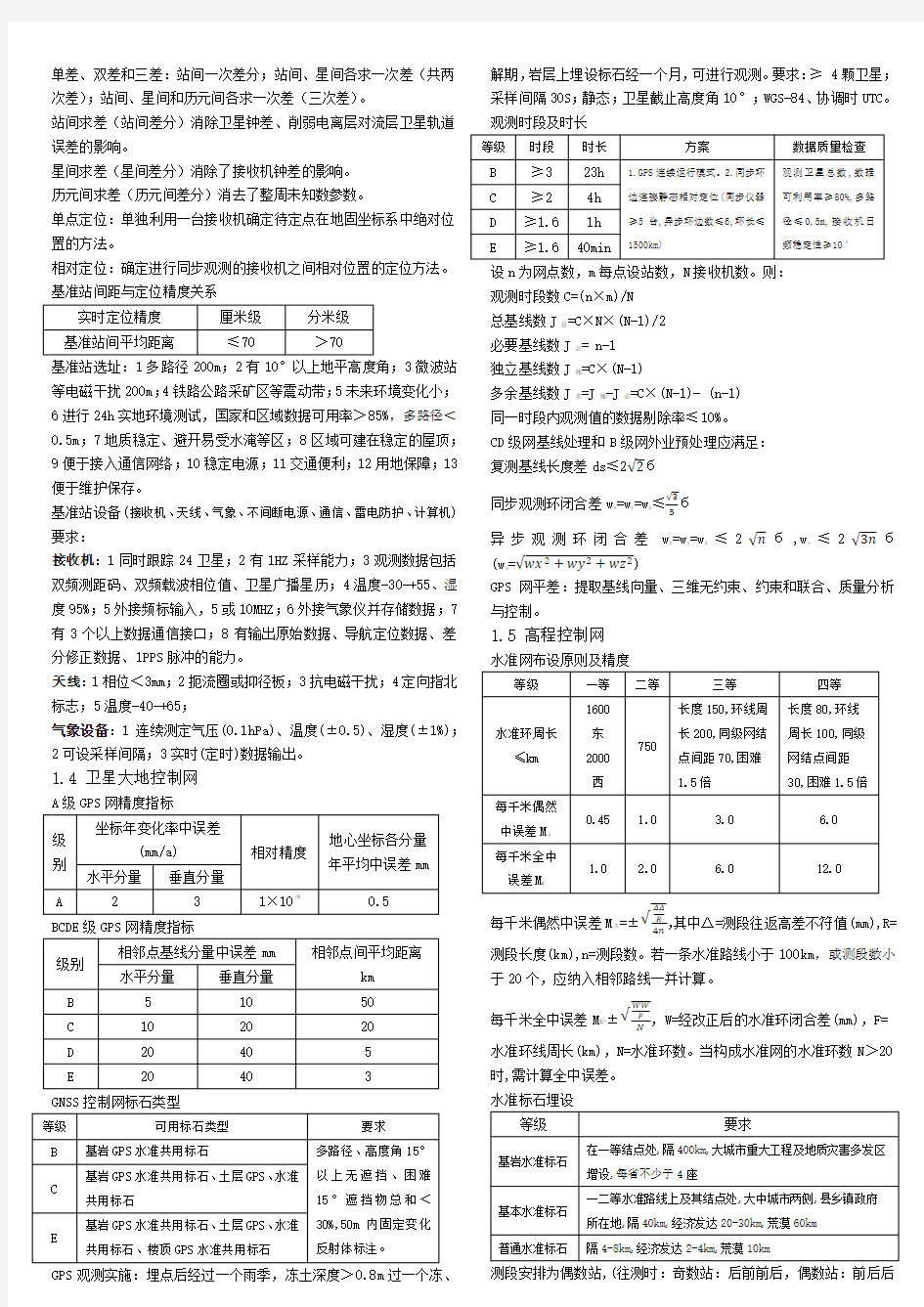
A级GPS网精度指标
BCDE级GPS网精度指标
GNSS控制网标石类型
GPS观测实施:埋点后经过一个雨季,冻土深度>0.8m过一个冻、解期,岩层上埋设标石经一个月,可进行观测。要求:≥ 4颗卫星;采样间隔30S;静态;卫星截止高度角10°;WGS-84、协调时UTC。观测时段及时长
设n为网点数,m每点设站数,N接收机数。则:
观测时段数C=(n×m)/N
总基线数J总=C×N×(N-1)/2
必要基线数J必= n-1
独立基线数J独=C×(N-1)
多余基线数J多=J独-J必=C×(N-1)- (n-1)
同一时段内观测值的数据剔除率≤10%。
CD级网基线处理和B级网外业预处理应满足:
复测基线长度差ds≤2б
同步观测环闭合差w x=w y=w z≤б
异步观测环闭合差w x=w y=w z≤2б,w s≤2б(w s=)
GPS网平差:提取基线向量、三维无约束、约束和联合、质量分析
与控制。
1.5 高程控制网
水准网布设原则及精度
每千米偶然中误差MΔ=±,其中Δ=测段往返高差不符值(mm),R=测段长度(km),n=测段数。若一条水准路线小于100km,或测段数小于20个,应纳入相邻路线一并计算。
每千米全中误差M W=±,W=经改正后的水准环闭合差(mm),F=水准环线周长(km),N=水准环数。当构成水准网的水准环数N>20时,需计算全中误差。
水准标石埋设
测段安排为偶数站,(往测时:奇数站:后前前后,偶数站:前后后
前,返测时:奇数站:前后后前,偶数站:后前前后)减弱i 角影响。三四等略有不同(三等:后前前后,往返或单程双转点;四等:后后前前一般测单程,支线单程双转点或往返测)。 跨河:一二等距离≤100m ,三四等距离≤200m 。
1.6 重力控制网
重力等位面就是水准面,把完全静止的海水面所形成的重力等位面称为大地水准面,重力是引力和离心力之和,重力等位面与铅垂线处处正交,重力等位面(水准面)之的位差不会等于零,故它们既不相交,也不相切,也不平行。分为国家重力基本网、国家一等重力网、国家二等重力点。
FG5绝对重力仪、拉科斯特(LCR)相对重力仪(一等)、石英弹簧重力仪(二等)。 联测要求
1.7 似大地水准面精化
按一定分辨率精确求定高程异常。几何法(天文水准、卫星测高及GPS 水准等)、重力法及几何重力联合法(组合法)。精度指标:
误差来源:GPS 测定大地高的误差;水准测量误差;重力测量误差;DEM 误差。
1.8 大地测量数据库
组成:大地测量数据(是核心,分为大地控制网数据、高程控制网数据、重力控制数据、深度基准数据)、管理系统(数据输入出、查询统计、数据维护、安全管理等)、支撑环境(服务器、存储备份设备、外围设备、网络环境)。分为国家、省区和市县三级。 大地测量数据库设计:分析与建模、概念模型设计、逻辑模型设计、物理模型设计。数据入库检查:正确性、数据完整性、逻辑关系正确性。
网络RTK 测量:单基站RTK(半径:30km),虚拟参考站、主副站(半径:40km)。
海洋测绘
海洋测绘是海洋测量和海图编制总称。特点:测量工作实时性;海底地貌不可视性;测量基准变化性;测量内容综合性。深度基准:理论最低潮面。海洋测深是确定海底表面至某一基准面的差距。 海道测量:港湾测量、沿岸测量、近海测量、远海测量。 海图:按内容分普通海图、专题海图、航海图。自由分幅,保持制图区域相对完整、航线及重要航行要素相对完整、保证航行安全方便使用前提下,尽可能减少图幅数量。全张图980mm ×680mm ,对开图680mm ×460mm 。坐标系:我国CGCS2000,国际WGS84;投影:航海图墨卡托、≥1:2万高斯投影、制图区域60%以上的地区纬度高于70
°时,日晷投影。
海洋测量:平面控制测量方法:三角、导线、卫星定位。海洋平面控制点分为:海控一级点(H 1)、海控二级点(H 2)、测图点(H)。 平面控制测量基本要求和投影分带规定
海洋测量控制点精度指标
高程探测测量
方法:几何水准、测距高程导线、三角高程、GPS 高程。技术要求:在一定水准高程点控制下,三角高程和GPS 高程是基本方法;电磁波测距三角高程(各边垂直角对向观测)可代替四等水准和等外水准;用于三角高程起算各类控制点应用水准联测其高程,且起测于国家等级水准点;GPS 高程应对测区分析高程异常,平坦地区已知水准点距离≤15km ,点数≥4个,困难地区≥3个。
海洋定位:指利用两条以上位置线,通过图上交会或解析计算求得海上某一点位置的理论与方法。海上位置线分为:方向、角度、距离、距离差位置线。方法:光学、无线电、卫星、水声定位。 水文观测:温度、盐度、密度、含沙量、化学成份、潮汐、潮流、波浪、声速。
潮汐类型:半日潮港(0<F ≤0.5)、混合潮港(0.5<F ≤4)、日潮港(F >4)。
水深测量方法:单波束与多波束回声测深及机载激光测深。 多波束校正:导航延迟、横摇、纵摇、艏偏校正。
水深测线布设:一般为直线,称测深线,分主测深线和检查线两类。单波束主测深线间隔为图上10mm ,多波束两条平行测线外侧波束20%重叠。主测深线应垂直于等深线总方向,狭窄航道45°。 水深改正:吃水改正、姿态改正、声速改正、水位改正。 测深精度:定位点的点位中误差(平面)