FANUC_刚性攻丝功能
编程的指令方式换档铣床车床
1
在G84(G74)之前指定M29齿轮切换〇〇
2有齿轮切换〇〇
3
M29和G84(G74)指定在同一程序段齿轮切换〇〇
4有齿轮切换〇〇
5
利用参数指定G84(G74)刚性攻丝方式齿轮切换〇〇
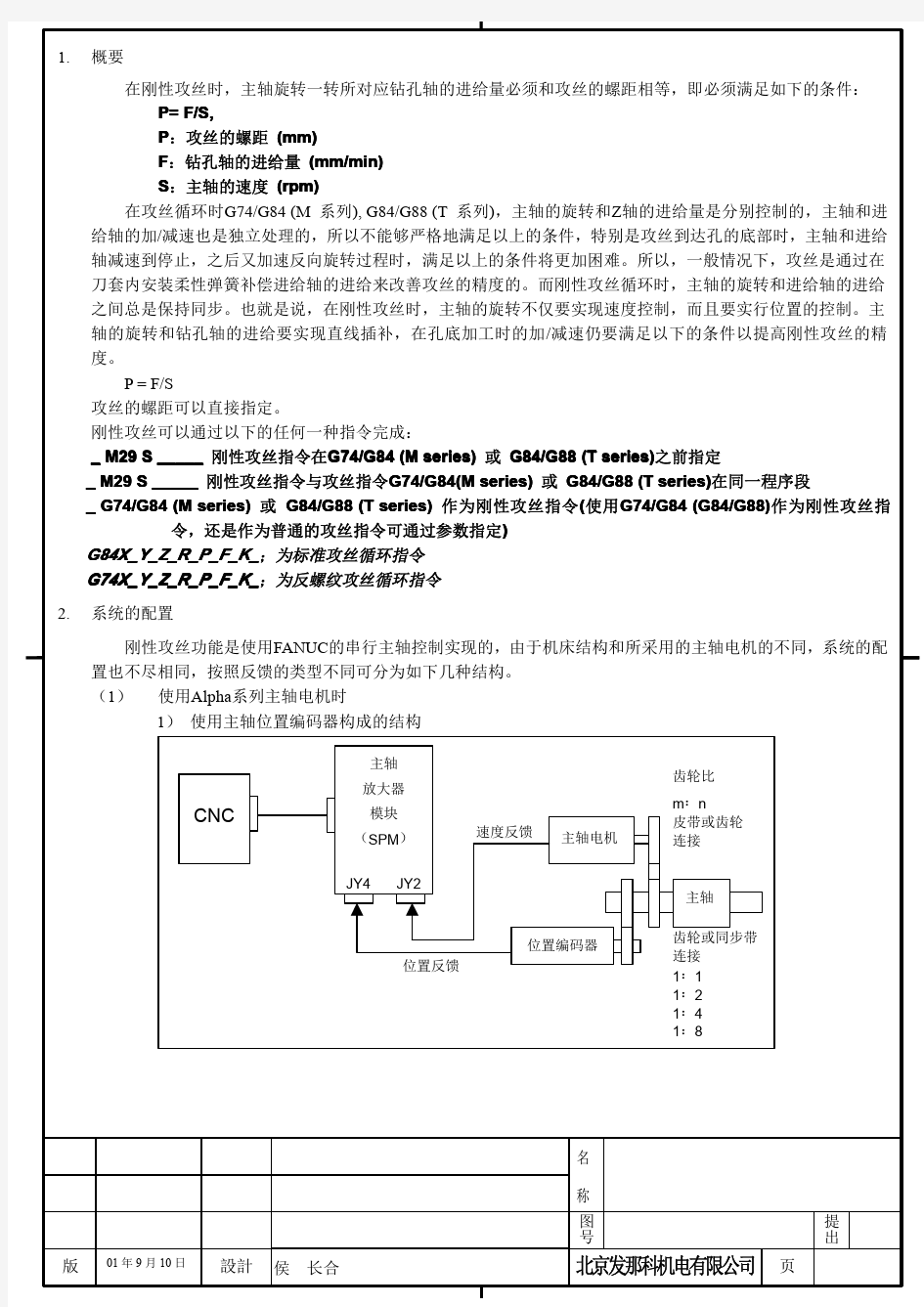
6有齿轮切换〇〇上不同的时序要求可以参考FANUC的连接说明书功能手册(B-63503C-01)的471-482页。5.刚性攻丝PMC的梯形图的实现
名
名
0001 F010 0000 R100
MF F7.0
SUB25 DECB
M07 M06 M05 M04 M03 M02 M01 M00
#7
#6
#5
#4
#3
#2
#1
#0
R100
0001 F010 0008 R101
MF F7.0
SUB25 DECB
M15 M14 M13 M12 M11 M10 M09 M08
#7
#6
#5
#4
#3
#2
#1
#0
R101
0001 F010 0016 R102
MF F7.0
SUB25 DECB
M23 M22 M21 M20 M19 M18 M17 M16
#7
#6
#5
#4
#3
#2
#1
#0
R102
0001 F010 0024 R103
MF F7.0
SUB25 DECB
M31 M30 M29 M28 M27 M26 M25 M24
#7
#6
#5
#4
#3
#2
#1
#0
R103
0002 F010 0040 R105
MF F7.0
SUB25 DECB
M47 M46 M45 M44 M43 M42 M41 M40
#7
#6
#5
#4
#3
#2
#1
#0
R105
名
M04R R100.4
M05R R100.5
RST F000.1
M03R R100.3 SFRW R122.0 M03R R100.3
M05R R100.5
RST F000.1
M04R R100.4 SRVW R122.1
SFRW R122.0
SRVW R122.1
M29D R103.5 SSTA F045.1
SFRA G070.5
RGTCAN R120.1
SRVA G070.4
RGTAPM R120.0
RGTAPM
R120.0
RGTAPM R120.0 RGTONM R121.0 0001 300
TMRB SUB24
RGTAPM R120.0 RGTOFTM R121.1 0002 300
TMRB SUB24 RGTAPM R120.0 RGTAP G061.0 SFRA G070.5
RTAP F076.3 RGTIN R121.2 RGTAP G061.0 RGTIN R121.2 RGENR R121.4 RGTIN R121.2 RGEND R121.3 RGEND R121.3
RGENR R121.4 RGTCAN R120.1
RGTCAN R120.1 RST F001.1 SA
F000.6
ALMA F045.0 M29D R103.5
M29D R103.5
RGTOFTM R121.1
6.刚性攻丝的有关参数
参数号符号说明必
设
参考备注
5200#0G84指定刚性攻丝的方法0
5200#1VGR 在刚性攻丝方式时,是否使用主轴和位置编码器之间的任
意齿轮比
当主轴与位置
编码器有特殊
变比时
5200#2CRG刚性攻丝方式,刚性攻丝取消指令的方式0 5200#3SIG刚性攻丝方式,齿轮切换是否使用SIND
5221刚性攻丝主轴侧的齿数(一档)
5222刚性攻丝主轴侧的齿数(二档)
5223刚性攻丝主轴侧的齿数(三档)
5224刚性攻丝主轴侧的齿数(四档)
5231刚性攻丝位置编码器侧的齿数(一档)
5232刚性攻丝位置编码器侧的齿数(二档)
5233刚性攻丝位置编码器侧的齿数(三档)
5234刚性攻丝位置编码器侧的齿数(四档)
5241刚性攻丝主轴的最高转速(一档)○
5242刚性攻丝主轴的最高转速(二档)○
5243刚性攻丝主轴的最高转速(三档)○
5244刚性攻丝主轴的最高转速(四档)○
5261刚性攻丝加/减速时间常数(一档)
5262刚性攻丝加/减速时间常数(二档)
5263刚性攻丝加/减速时间常数(三档)
5264刚性攻丝加/减速时间常数(四档)
5271刚性攻丝回退加/减速时间常数(一档)
5272刚性攻丝回退加/减速时间常数(二档)
5273刚性攻丝回退加/减速时间常数(三档)
5274刚性攻丝回退加/减速时间常数(四档)
5280刚性攻丝时,主轴和攻丝轴的位置环增益(公共参数)○
5281刚性攻丝时,主轴和攻丝轴的位置环增益(一档)
5282刚性攻丝时,主轴和攻丝轴的位置环增益(二档)
5283刚性攻丝时,主轴和攻丝轴的位置环增益(三档)
5284刚性攻丝时,主轴和攻丝轴的位置环增益(四档)
5291刚性攻丝时,主轴环增益倍乘比(一档)
5292刚性攻丝时,主轴环增益倍乘比(二档)
5293刚性攻丝时,主轴环增益倍乘比(三档)
5294刚性攻丝时,主轴环增益倍乘比(四档)
名
5300刚性攻丝时,攻丝轴的在位宽度○1 5301刚性攻丝时,主轴的在位宽度○5310刚性攻丝时,攻丝轴运动中的位置偏差极限值○5311刚性攻丝时,主轴在运动中的位置偏差极限值○5312刚性攻丝时,攻丝轴停止时的位置偏差极限值○5313刚性攻丝时,主轴在停止时的位置偏差极限值○5314刚性攻丝时,攻丝轴运动位置偏差值的极限值○
5321(T)5321(M)刚性攻丝时,主轴的反向间隙(一档)刚性攻丝时,主轴的反向间隙
5322(T)刚性攻丝时,主轴的反向间隙(二档)5323(T)刚性攻丝时,主轴的反向间隙(三档)5324(T)刚性攻丝时,主轴的反向间隙(四档)
3707#0 3707#1P21
P22
主轴和编码器之间的齿轮比○★依机床而定
4000#0ROTA1主轴和主轴电机之间的安装方向○★依机床而定4000#2POSC1主轴和位置编码器之间的方向○★依机床而定4001#2POSC2位置编码器是否使用○1
4003#7, 4003#6 4003#5 4003#4PCPL2
PCPL1
PCPL0
PCTYPE
编码器的类型○★
依电机和反馈元件而
定
4006#7BLTRGD 使用内装传感器(MZ Sensor)进行刚性攻丝时,使用任意齿
轮比
★★
依电机和反馈元件而
定
4056主轴和主轴电机之间的齿轮比(高)CTH1A=0,CTH2A=0○★依机床而定4057主轴和主轴电机之间的齿轮比(中高)CTH1A=0,CTH2A=1○★依机床而定4058主轴和主轴电机之间的齿轮比(中低)CTH1A=1,CTH2A=0○★依机床而定4059主轴和主轴电机之间的齿轮比(低)CTH1A=1,CTH2A=1○★依机床而定4044伺服控制/同步控制时速度环比例增益(高档齿)CTH1A=0◎☆
4045伺服控制/同步控制时速度环比例增益(低档齿)CTH1A=1◎☆
4052伺服控制/同步控制时速度环积分增益(高档齿)CTH1A=0◎☆
4053伺服控制/同步控制时速度环积分增益(低档齿)CTH1A=1◎☆
4085伺服控制/同步控制时电机电压的设定◎☆
4137伺服控制/同步控制时电机电压的设定(低速)◎☆
4099刚性攻丝时,电机激磁稳定的延迟时间◎0
○:必须设定
◎:自动设定
☆:自动设定
★:根据不同的条件设定
名
名e)设定主轴和位置编码器的齿轮比
主轴与位置编码器之间的机械结构大多是1:1连接的,一般即使有变比,一般也处理为主轴与位置编码器的比例为1,2,4,8(主轴转数/编码器转数)。该参数的设定方法如下:
#7
#6#5#4#3#2
#1#0PRM3707
P22P21
倍数PG22PG21倍数=
主轴转数/位置编码器的转数
×100×201×410×8
1
1
当主轴和位置编码器的机械结构不是如上结构时,就必须使用任意齿轮比进行设定,具体的设定方法如下:
5200#1
VGR
在刚性攻丝方式时,是否使用主轴和位置编码器之间的任意齿轮比
PRM5200#1(VGR )=1时,以下参数有效
参数内容
5221刚性攻丝主轴侧的齿数(一档)5222刚性攻丝主轴侧的齿数(二档)5223刚性攻丝主轴侧的齿数(三档)5224刚性攻丝主轴侧的齿数(四档)
5231刚性攻丝位置编码器侧的齿数(一档)5232刚性攻丝位置编码器侧的齿数(二档)5233刚性攻丝位置编码器侧的齿数(三档)5234
刚性攻丝位置编码器侧的齿数(四档)
以上每个参数的选择是根据系统的齿轮选择信号来确定的,请参考下表:M 系列(标准系统)
档位齿轮选择信号
主轴侧参数号编码器侧参数号GR3O F152.2GR2O F152.1GR1O F152.0第1档001齿数15221齿数15231第2档010齿数25222齿数25232第3档
1
齿数3
5223
齿数3
5233
M系列(标准系统)
档位
齿轮选择信号参数
GR3O
F152.2
GR2O
F152.1
GR1O
F152.0
时间常数
(攻入)
时间常数
(退出)
第1档00152615271第2档010********第3档10052635273 T/TT系列或M系列(表面恒速控制)
档位
齿轮选择信号参数
GR21
G29#0
GR2
G28#2
GR1
G28#1
时间常数
(攻入)
时间常数
(退出)
第1档00052615271
第2档10152625272
第3档-1052635273
第4档-115264(*1)5274(*1)h)刚性攻丝时,位置环的增益
M系列(标准系统)
档位
齿轮选择信号
参数号GR3O
F152.2
GR2O
F152.1
GR1O
F152.0
5280(*1)
第1档0015281第2档0105282第3档1005283 T/TT系列或M系列(表面恒速控制)
档位
齿轮选择信号参数
GR21
G29#0
GR2
G28#2
GR1
G28#1
T/TT M
5280(*1)
第1档0005271
第2档1015272
第3档-105273
第4档-1152845283
名
报警号显示内容说明
207攻丝的数据不匹配攻的距离太长或太短
410伺服报警:n轴超差N轴(攻丝轴1~4)停止时的误差超过设定值(No:5312)
411伺服报警:n轴超差N轴(攻丝轴1~4)运动时的误差超过设定值(No:5313或5314)
413伺服报警:n轴LSI溢出N轴(攻丝轴1~4)的误差计数器的值超过-231~231,请修改有关位置环的参数。
740刚性攻丝报警:超差主轴移动时位置误差超出设定值
741刚性攻丝报警:超差主轴移动时误差超过设定值或同步误差超过设定值(参数No:5214)
742刚性攻丝报警:LSI溢出攻丝时主轴侧LSI溢出
名
刚性攻丝
设定参数实现刚性攻丝 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/反转指令, 然后再编人G84/G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住( 惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软( 铜或铝) 时, 螺纹精度将不能得到保证。还有一点要注意的是,
当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具( 丝锥) 强度允许, 主轴的转速能提高很多,4 000r/min 的主轴速度已经不在话下。加工效率提高 5 倍以上, 螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。 2 刚性攻丝功能的实现 从电气控制的角度来看, 数控系统只要具有主轴角度位置控制和同步功能, 机床就能进行刚性攻丝, 当然还需在机床上加装反馈主轴角度的位置编码器。要正确地反映主轴的角度位置, 最好把
FANUCOi 刚性攻牙参数
FANUCOi 刚性攻牙参数 FANUC Oi 系统开通刚性攻牙功能需要设定参数仅供参考。将参数 No.5200#0 设置为 1,修改以下参数:攻丝最高主轴转速 N0.5241 - N0.5244 主轴与攻丝轴的时间常数 N0.5261 - No.5264 刚性攻丝轴回路增益 N0.5280 - N0.5284 刚性攻丝时攻丝轴移动位置偏差量的极限值N0.5310 刚性攻丝时主轴移动位置偏 差量的极限值 N0.5311 刚性攻丝时的攻丝轴停止时的位置偏差量极限值 N0.5312 刚性攻丝时的主轴停止时的位置偏差量极限值 N0.5313 。如下列: (1) 每分钟进给编程右螺纹G94; Z 轴每分钟进给M3Sl000;主轴正转(1000r/min) G9O G84 X-300.Y-250.Z-150.R-120. P300 F1000;右螺纹攻丝 , 螺距 lmm 左螺 纹G94; Z 轴每分钟进给M4Sl000; 主轴反 转(1000r/min) G9O G74X-300.Y-250.Zl50.R-120.P300 F1000; 左螺纹攻丝 , 螺距 lmm (2) 每 转 ( 主轴 ) 进给编程右螺纹G95; Z 轴进给 / 主轴每转M3 S1000; 主轴正转 (1000r/min) G9O G84X-300.Y-250.Z-150.R-120. P300 F1.0; 右螺纹攻 丝 , 螺距 1mm 右螺纹G95;Z 轴进给 / 主轴每转M4S1000;主轴反转 (1000r/min) G90 G74 X-300.Y-250.Z150.R-120. P300 F1.0; 左螺纹攻丝 , 螺距 l mm 以上 刚性攻丝编程由于将参数 No.5200#0 设置为 1, 固定循环 G84/ 成为刚性攻丝的指令 , 所以它的编程格 式就完全与原固定循环 G84/G74 普通攻丝是一样的
FANUC Oi 刚性攻丝
FANUC Oi 系统开通刚性攻牙功能需要设定参数仅供参考。 将参数 No.5200#0 设置为 1,修改以下参数:攻丝最高主轴转速 N0.5241 - N0.5244 主轴与攻丝轴的时间常数 N0.5261 - No.5264 刚性攻丝轴回路增益 N0.5280 - N0.5284 刚性攻丝时攻丝轴移动位置偏差量的极限值N0.5310 刚性攻丝时主轴移动位置偏差量的极限值 N0.5311 刚性攻丝时的攻丝轴停止时的位置偏差量极限值 N0.5312 刚性攻丝时的主轴停止时的位置偏差量极限值 N0.5313 。如下列: (1) 每分钟进给编程右螺纹G94; Z 轴每分钟进给M3Sl000;主轴正转(1000r/min) G9O G84X-300.Y-250.Z-150.R-120. P300 F1000;右螺纹攻丝 , 螺距 lmm 左螺纹G94; Z 轴每分钟进给M4Sl000; 主轴反转(1000r/min) G9O G74 X-300.Y-250.Zl50.R-120.P300 F1000; 左螺纹攻丝 , 螺距 lmm (2) 每转 ( 主轴 ) 进给编程右螺纹G95; Z 轴进给 / 主轴每转M3S1000; 主轴正转 (1000r/min) G9O G84X-300.Y-250.Z-150.R-120. P300 F1.0; 右螺纹攻丝 , 螺距 1mm 右螺纹G95;Z 轴进给 / 主轴每转M4S1000;主轴反转 (1000r/min) G90 G74 X-300.Y-250.Z150.R-120. P300 F1.0; 左螺纹攻丝 , 螺距 l mm 以上刚性攻丝编程由于将参数 No.5200#0 设置为 1, 固定循环 G84/ 成为刚性攻丝的指令 , 所以它的编程格式就完全与原固定循环 G84/G74 普通攻丝是一样的
FANUC设定参数实现刚性攻丝
FANUC设定参数实现刚性攻丝 (大连机床集团有限责任公司黄贤鸿) 1 两种攻丝方式的比较 以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以
及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具(丝锥)强度允许,主轴的转速能提高很多,4000r/min 的主轴速度已经不在话下。加工效率提高 5 倍以上,螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。 2 刚性攻丝功能的实现 从电气控制的角度来看, 数控系统只要具有主轴角度位置控制和同
广数圆度误差调试指导说明书
圆度误差调试指导 原理说明: 18XP系列世纪星硬件设计具有可以采集脉冲数据的特性,因而可以来对走圆过程中的X轴与Y轴的脉冲进行采集与分析,带有采集功能的18XP设 计了通过图形界面的方式来显示两轴的同步误差,对两个进给轴插补铣圆的轨 迹进行同步描绘并显示出误差精度,以便分析后进行相关参数调整,将铣削圆 度误差控制在较小的范围内。 接线说明: 1.0.3m 电缆和2m 电缆共同的DB15头孔接到21(或18)世纪星的轴口 2.0.3m 电缆的DB15头针接到21(或18)世纪星的轴口指令线上 3.2m 电缆的另一DB15头孔接到18XP的轴口上 [注意]:以上接线中,21(或18)系统的X轴与18XP的X轴连接;21(或 18)系统的Y轴与18XP的Y轴连接 18XP调试18系列世纪星的接线见<刚性攻丝调试指导说明书>附图1 18XP调试21系列世纪星的接线见<刚性攻丝调试指导说明书>附图2 参数设置: 在21的轴参数中设置以下几个参数: 1、外部脉冲当量分子:18XP跟21设置成一致; 2、外部脉冲当量分母:18XP设置成21的值乘以4;例如,21若为2, 则18XP需设置成8; 3、电机每转脉冲数:18XP设置成21的值乘以4;例如,21若为2500, 则18XP设置成10000; 4、是否带反馈:18XP和21都需设置成45(带反馈); 在18的轴参数中设置以下几个参数: 5、外部脉冲当量分子:18XP跟18设置成一致; 6、外部脉冲当量分母:18XP跟18设置成一致; 7、电机每转脉冲数:18XP跟18设置成一致; 8、是否带反馈:18XP和21都需设置成45(带反馈); 另外18XP中要设置: 1、要查看18XP中:“诊断”-“伺服调试”-“轴设置”中是否为系统默 认设置,即(x y z c):(0 1 2 0),若不是,则改为如此。 2、要查看18XP中:“诊断”-“伺服调试”-“轮廓误差”-“参数设置” 中是否为系统默认设置,即radius =20 ,此值与18XP系统自带的G代码程序 O00F1中的铣圆半径值20一致;若要修改圆半径,则这两个值都要修改成一 致。
刚性攻丝&柔性攻丝
理论上,攻螺纹时,当主轴转一转,Z轴的进给总量应该等于丝锥的螺距。即:P=F/S 式中P—丝锥的螺距,mm F—Z轴的送给量,mm/min S—主轴转速,r/min 一般的攻螺纹功能,主轴的转速和Z 轴的进给是独立控制,因此上面的条件可能并不满足。特别在孔的底部,主轴和Z 轴的转速降低并停止,然后它们反转,而且转速增加,由于各自独立执行加、减速,因此上面的条件更可能不满足。为此,通常由装在攻丝夹头内部的弹簧对进给量进行补偿以改善攻螺纹的精度。 如果控制主轴的旋转和Z 轴的进给总是同步,那么攻丝的精度就可以得到保证。这种方法称为“刚性攻丝”。这时主轴的运行从速度系统变成位置系统运行。 在加工中心上面攻丝时,要求丝锥的进给和旋转必须同步,即:进给量=转速×螺距,以防止拉断丝锥。这样就必须要去伺服电机来驱动主轴,要求在主轴上面增加位置传感器,对主轴传动机构的间隙和惯量都会有严格的要求。如果机床不具备这样的条件,只能选择柔性攻丝,在丝锥夹头中增加弹性装置,若产生不同步,弹性装置的伸缩量会补偿丝锥的进给量和“转速×螺距”的差值。此即柔性攻丝。很多工厂在加工中心上,工件装夹稳定的时候使用柔性攻丝。其实在加工条件好的情况下,使用柔性攻丝犹如画蛇添足。刚性攻丝就是要求丝锥的旋转角度和轴向进给严格配比,即使在加速、减速、反转等过程也不例外。 刚性攻丝的刀具夹持系统通常比柔性攻丝的刀具夹持系统价格低一些,螺纹长度的控制也更为精确,螺纹精度比柔性攻丝好。但柔性攻丝可选择扭距过载保护,这一点刚性攻丝不能做到。通常柔性攻丝的丝锥寿命要比刚性攻丝的长。 现在有专用刚性攻丝丝锥,螺纹部分较柔性攻丝丝锥短,带侧固槽,寿命比柔性攻丝要长。
设定参数实现刚性攻丝
设定参数实现刚性攻丝 (大连机床集团有限责任公司黄贤鸿) 1 两种攻丝方式的比较 以前的加工中心为了攻丝 , 一般都是根据所选用的丝锥和工艺要求 , 在加工程序中编入一个主轴转速和正 /反转指令 , 然后再编人 G84/G74 固定循环 , 在固定循环中给出有关的数据 , 其中 Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出 , 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的 , 但是主轴的转动角度是不受控的 , 而且主轴的角度位置与 Z 轴的进给没有任何同步关系 , 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程 , 主轴要加速-制动-加速-制动 , 再加上在切削过程中由于工件材质的不均匀 , 主轴负载波动都会使主轴速度不可能恒定不变。对于进给 Z 轴 , 它的进给速度和主轴也是相似的 , 速度不会恒定 , 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时 , 必须配用带有弹簧伸缩装置的夹头 , 用它来补偿 Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程 , 就会明显地看到 , 当攻丝到底 ,Z 轴停止了而主轴没有立即停住 ( 惯量 ), 攻丝弹簧夹头被压缩一段距离 , 而当 Z 轴反向进给时 , 主轴正在加速 , 弹簧夹头被拉伸 , 这种补偿弥补了控制方式不足造成的缺陷 , 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求 , 但对于螺纹精度要求较高 ,6H 或以上的螺纹以及被加工件的材质较软 ( 铜或铝 ) 时 , 螺纹精度将不能得到保证。还有一点要注意的是 , 当攻丝时主轴转速越高 ,Z 轴进给与螺距累积量之间的误差就越大 , 弹簧夹头的伸缩范围也必须足够大 , 由于夹头机械结构的限制 , 用这种方式攻丝时 , 主轴转速只能限制在 600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的 , 它在主轴上加装了位置编码器 , 把主轴旋转的角度位置反馈给技控系统形成位置闭环 , 同时与 Z 轴进给建立同步关系 , 这样就严格保证了主轴旋转角度和 Z 轴进给尺寸的线生比例关系。因为有了这种同步关系 , 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或 Z 轴移动的位置变化也不影响加工精度 , 因为主轴转角与 Z 轴进给是同步的 , 在攻丝中不论任何一方受干扰发生变化 , 则另一方也会相应变化 , 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔 , 可以很清楚地看到 , 当 Z 轴攻丝到达位置时 , 主轴转动与 Z 轴进给是同时减速并同时停止的 , 主轴反转与 Z 轴反向进给同样保持一致。正是有了同步关系 , 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了 , 而且刚性攻丝时 , 只要刀具 ( 丝锥 ) 强度允许 , 主轴的转速能提高很多 ,4 000r/min 的主轴速度已经不在话下。加工效率提高 5 倍以上, 螺纹精度还得到保证 , 目前已经成为加工中心不可缺少的一项主要功能。 2 刚性攻丝功能的实现 从电气控制的角度来看 , 数控系统只要具有主轴角度位置控制和同步功能 , 机床就能进行刚性攻丝 , 当然还需在机床上加装反馈主轴角度的位置编码器。要正确地反映主轴的角度位置 , 最好把编码器与主轴同轴联接 , 如果限于机械结构必需通过传动链联接时 , 要坚持 1:1 的传动比 , 若用皮带 , 则非同步带不可。还有一种可能 , 那就是机床主轴和主轴电动机之间是直连 , 可以借用主轴电动机本身带的内部编码器作主轴位置反馈 , 节省二项开支。
刚性攻丝参数设置
刚性攻丝参数设置 1.与主轴相关参数 4000#0=0 主轴与电机的旋转方向一致 4001#4=0 主轴传感器安装方向与主轴旋转方向一致 、4002#3,2,1,0=0,0,1,0 在主轴传感器上用位置编码器4003#7,6,5,4=0,0,0,0,主轴传感器的齿轮比设定1:1 2. 刚性攻丝参数 5101.6=1 攻丝到孔底时输出在反转 5112=3 攻丝时主轴正转的M代码 5113=3 攻丝时主轴反转的M代码 5200.0=1 刚性攻丝(没设为弹性攻丝) 5204=1 在诊断上显示刚性攻丝的同步偏差 5211=100 刚性攻丝退刀时的倍率 5241=2500 刚性攻丝时主轴最高转速1 5242=2500 刚性攻丝时主轴最高转速1 5261=100 主轴和攻丝轴的直线加减速的时间常数1 5262=100 主轴和攻丝轴的直线加减速的时间常数1 5300=10 刚性攻丝时攻丝轴的到位宽度 5301=50 刚性攻丝时主轴的到位宽度 5310=13000 刚性攻丝时攻丝轴移动时位移偏差 5311=30000 刚性攻丝时主轴移动时位移偏差 5312=200 刚性攻丝时攻丝轴停止时位移偏差 5313=500 刚性攻丝时主轴停止时位移偏差 1620=200 快速移动直线加/减速时间常数 1621=200 快速移动铃型加/减速时间常数 5314= 刚性攻丝时攻丝轴移动时位移偏差(当设定值超出5310的设定范围,可设本参数) 5280=3000 刚性攻丝中主轴与攻丝轴的位置控制的环路增益 与4065—4068一致 注:1、机床震动时可把5280改小 2、当有位置偏差报警时可修改上述相应位置偏差参数(不同机型参数可根据情况修改) 3.主轴定向参数 4015#0=1 定向有效 4031 定向角度 4.刚性攻丝指令程序 M03S300 M29S300 G84Z-50R2F1 G80 M30
FANUC系统设定参数实现刚性攻丝
FANUC系统设定参数实现刚性攻丝 两种攻丝方式的比较:以前的加工中心为了攻丝 , 一般都是根据所选用的丝锥和工艺要求 , 在加工程序中编入一个主轴转速和正 /反转指令 , 然后再编人 G84/G74 固定循环 , 在固定循环中给出有关的数据 , 其中 Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出 , 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的 , 但是主轴的转动角度是不受控的 , 而且主轴的角度位置与 Z 轴的进给没有任何同步关系 , 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程 , 主轴要加速-制动 -加速-制动 , 再加上在切削过程中由于工件材质的不均匀 , 主轴负载波动都会使主轴速度不可能恒 定不变。对于进给 Z 轴 , 它的进给速度和主轴也是相似的 , 速度不会恒定 , 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时 , 必须配用带有弹簧伸缩装置的夹头 , 用它来补偿 Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程 , 就会明显地看到 , 当攻丝到底 ,Z 轴停止了而主轴没有立即停住 ( 惯量 ), 攻丝弹簧夹头被压缩一段距离 , 而当 Z 轴反向进给时 , 主轴正在加速 , 弹簧夹头被拉伸 , 这种补偿弥补了控制方式不足造成的缺陷 , 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求 , 但对于螺纹精度要求较高 ,6H 或以上的螺纹以及 被加工件的材质较软 ( 铜或铝 ) 时 , 螺纹精度将不能得到保证。还有一点要注意的是 , 当攻丝时主轴转速越高 ,Z 轴进给与螺距累积量之间的误差就越大 , 弹簧夹头的伸缩范围也必须足够大 , 由于夹头 机械结构的限制 , 用这种方式攻丝时 , 主轴转速只能限制在 600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的 , 它在主轴上加装了位置编码器 , 把主轴旋转的角度位置反馈给技控系统形成位置闭环 , 同时与 Z 轴进给建立同步关系 , 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系 , 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或 Z 轴移动的位置变化也不影响加工精度 , 因为主轴转角与 Z 轴进给是同步的 , 在攻丝中不论任何一方受干扰发生变化 , 则另一方也会相应变化 , 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔 , 可以很清楚地看到 , 当 Z 轴攻丝到达位置时 , 主轴转动与 Z 轴进给 是同时减速并同时停止的 , 主轴反转与 Z 轴反向进给同样保持一致。正是有了同步关系 , 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了 , 而且刚性攻丝时 , 只要刀具 ( 丝锥 ) 强度允许 , 主 轴的转速能提高很多 ,4 000r/min 的主轴速度已经不在话下。加工效率提高 5 倍以上, 螺纹精度还得到保证 , 目前已经成为加工中心不可缺少的一项主要功能。 刚性攻丝功能的实现:从电气控制的角度来看 , 数控系统只要具有主轴角度位置控制和同步功能 , 机床就能进行刚性攻丝 , 当然还需在机床上加装反馈主轴角度的位置编码器。要正确地反映主轴的角度位置 , 最好把编码器与主轴同轴联接 , 如果限于机械结构必需通过传动链联接时 , 要坚持 1:1 的传动 比 , 若用皮带 , 则非同步带不可。还有一种可能 , 那就是机床主轴和主轴电动机之间是直连 , 可以借用主轴电动机本身带的内部编码器作主轴位置反馈 , 节省二项开支。除去安装必要的硬件外 , 主要的工作是梯形图控制程序的设计调试。市面上有多种数控系统 , 由于厂家不同 , 习惯各异 , 对刚性攻丝的信号安排和处理是完全不一样的。我们曾经设计和调试过几种常用数控系统的刚性攻丝控制程序 , 都比较繁琐。调试人员不易理解梯形图控制程序 , 特别是第一台样机调试周期长 , 不利于推广和使用。尽管如此 , 加工中心有了该项功能 , 扩大了加工范围 , 受到用户的青睐。
数控机床调试步骤要求内容
数控机床调试步骤要求 (一)安装调试的前期准备工作:用户的准备事项,由售后服务人员联系落实。 (1)立式加工中心 1.机床的吊运与安装:包括机床的吊运、开箱、安装、粗调水平、防锈油的清洗。其中安装可采用混凝土地基加地脚螺钉固定机床,或直接使用随机的调整垫铁加地脚螺钉固定机床。 2.根据机床型号的不同确定外接电源线的线径,以下为各种型号机床参考线径: 2.1 CY-VMC650采用10平方毫米左右线径。 2.2 CY-VMC850采用16平方毫米左右线径。 2.3 CY-VMC1060/1270/1370采用25平方毫米左右线径。 2.4 CY-VMC1580/1690/1890采用35平方毫米左右线径。 2.5 所有机床必须可靠接地。 3.安装调试前用户需购买以下备件物品: 3.1 空压机,要求排量在0.6立方米/分钟以上。 3.2 连接空压机至机床的PTV气管,外径为12毫米。 3.3 标准刀柄和拉钉:CY-VMC650/850/1060采用型号为BT-40刀柄和45°拉钉;CY-VMC1270/1370/1580采用型号为BT-50刀柄和45°拉钉。 3.4刀具的购买:根据用户加工零件的实际情况,来确定购买不同夹持方式的刀柄和刀具,比如: 3.4.1铣平面用的盘铣刀柄和直径为Ф63、Ф80、Ф100不等的盘铣刀体及刀片。 3.4.2强力铣夹头刀柄,主要方便于夹持直径较大的外圆铣刀和球头铣刀,例如夹持Ф20毫米的球头铣刀。 3.4.3弹簧夹头刀柄,主要方便于夹持小直径外圆铣刀和球头铣刀,例如夹持Ф3~Ф16毫米的外圆铣刀。常用的刀柄规格型号为Ф32型刀柄。 3.4.4一体式或分离式钻夹头刀柄,主要用于装夹直柄小直径钻头,常见刀柄规格型号为Ф3~Ф13毫米的钻夹头。 3.4.5带扁尾莫氏锥孔刀柄,主要用于装夹锥柄钻头。常用的刀柄规格型号是3号和4号莫氏锥孔刀柄。
FANUC系统设定参数实现刚性攻丝
FANUC系统设定参数实现刚性攻丝 1 两种攻丝方式的比较
以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/反转指令, 然后再编人G84/G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住( 惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软( 铜或铝) 时, 螺纹精度将不能得到保证。还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具( 丝锥) 强度允许, 主轴的转速能提高很多,4 000r/min 的主轴速度已经不在话下。加工效率提高5 倍以上, 螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。
2 刚性攻丝功能的实现
从电气控制的角度来看, 数控系统只要具有主轴角度位置控制和同步功能, 机床就能进行刚性攻丝, 当然还需在机床上加装反馈主轴角度的位置编码器。要正确地反映主轴的角度位置, 最好把编码器与主轴同轴联接, 如果限于机械结构必需通过传动链联接时, 要坚持1:1 的传动比, 若用皮带, 则非同步带不可。还有一种可能, 那就是机床主
cnc加工中心攻丝技能讲解及编程实例【干货】
内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 两种攻丝方式的比较 1、以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/反转指令, 然后再编人G84/G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F =丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。 虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住( 惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴
反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。 对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软( 铜或铝) 时, 螺纹精度将不能得到保证。还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的 , 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具( 丝锥) 强度允许, 主轴的转速能提高很多,4 000r/min 的主轴速度已经不在话下。加工效率提高5 倍以上, 螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。 2 刚性攻丝功能的实现
论刚性攻丝和柔性攻丝区别
刚性就是说攻丝的刀柄是刚性的没有自动调整间隙的而柔性的是有调整间隙的一般的是带弹簧延轴线有弹性收缩功能的。 柔性攻丝是指不带编码器(C轴编码器)是:用通过编计算控制螺距的攻丝的如G81 CYCLE8403 刚性攻丝是指带编码器攻丝(C轴编码器)是:C轴每转一圈走一个螺距。用固定指令CYCL84 G3319 柔性攻丝也称浮动攻丝,就是主轴转速与进给没有严格的同步成比例的关系。刚性攻丝正相反。要说区别,首先的说什么叫刚性攻丝,理论上,攻螺纹时,当主轴转一转,Z轴的进给总量应该等于丝锥的螺距。即:P=F/S式中P—丝锥的螺距,mmF—Z轴的送给量, mm/min9 ,S—主轴转速,r/min
一般的攻螺纹功能,主轴的转速和Z轴的进给是独立控制,因此上面的条件可能并不满足。别在孔的底部,主轴和Z轴的转速降低并停止,然后它们反转,而且转速增加,由于各自独 立执行加、减速,因此上面的条件更可能不满足。为此,通常由装在攻丝夹头内部的弹簧对 送给量进行补偿以改善攻螺纹的精度。
如果控制主轴的旋转和Z轴的进给总是同步,那么攻丝的精度就可以得到保证。这种方法 称为“刚性攻丝”。这时主轴的运行从速度系统变成位置系统运行刚性攻丝也可以使用弹簧筒夹,如果在铝合金上攻10mm以下的螺纹,普通弹簧筒夹即可,如果是钢件、铸铁件,或是 大尺寸最好用攻丝用弹簧筒夹。 国内的目前刚性攻丝的应该不多,大部分都是柔性攻丝,因为咱们的丝锥的原因,老外的 丝锥用过一段时间后就不用了,咱们的是用到不能用(或者是断到孔里了),主要是怕花钱,觉得好好的丝锥怎么用了才几次就扔了,觉得可惜,这样刚性攻丝的话很容易就断了。国内 的话编程建议柔性攻丝。对于攻丝刀柄的购买,应选择钛浩。
FANUC OI 刚性攻丝参数
刚性攻丝的参数 NO.4002P00000001(不带外装编码器) NO.4002P00000010(带外装编码器) NO.4044P30 NO.4045P20 NO.4052P60 NO.4065P3000 NO.5202P00000001 NO.5204P00000001 NO.5211P10 NO.5214P20000(可适当放大) NO.5241.P1000(刚性攻丝时主轴的最高转速,根据具体情况,可以 进行调整) NO.5242.P1000 NO.5243.P1000 NO.5244.P1000 NO.5261.P1000(主轴和攻丝轴的直线加减速时间常数, 根据具体 情况,可以进行调整) NO.5262.P1000 NO.5263.P1000 NO.5271.P1000(回退时主轴和攻丝轴的直线加减速时间常数, 根 2005年5月
据具体情况,可以进行调整) NO.5272.P1000 NO.5273.P1000 NO.5280.P3000(刚性攻丝时主轴和攻丝轴的位置控制回路增益, 根 据具体情况, 可以进行调整) NO.5281.P0 NO.5282.P0 NO.5283.P0 NO.5291.P2000(刚性攻丝时主轴回路增益系数, 根据具体情况, 可 以进行调整) NO.5300.P50 NO.5301.P50 NO.5310.P10000(可适当放大) NO.5311.P10000(可适当放大) NO.5312.P300 NO.5313.P300 NO.5314.P5000(可适当放大) NO.5321.P10 试验程序:夞 2005年5月
攻丝工艺
6.5 攻丝工艺编程 6.5.1 攻丝加工的内容、要求 用丝锥在工件孔中切削出内螺纹的加工方法称为攻螺纹; 攻丝加工的螺纹多为三角螺纹,为零件间连接结构,常用的攻丝加工的螺纹有;牙型角为60°的公制螺纹,也叫普通螺纹;牙型角为55°的英制螺纹;用于管道连接的英制管螺纹和圆锥管螺纹。本节主要涉及的攻丝加工的是公制内螺纹,熟悉有关螺纹结构尺寸、技术要求的常识,是学习攻丝工艺的重要基础。 普通螺纹的基本尺寸如下: (1)螺纹大径:d =D (螺纹大径的基本尺寸与公称直径相同) (2)中径: d2=D2=d -0.6495P (3)牙型高度:H =O.5413P (4)螺纹小径:d1=D1=d -1.0825P 如图6-5-1中M10-7H 的螺纹,为普通右旋内螺纹。查表得螺距P =1.5,其基本尺寸: 螺纹大径:D =10; 螺纹中径: D2=D -0.6495P =9.02 螺纹小径:D1=D -1.0825P =8.36 中径公差带代号7H )(0.0.2240+ 小径公差带代号7H )(0.3750 + 牙型高度:H =O.5413P =0.82 螺纹有效长度:L =20.0 螺纹孔口倒角: C1.5 图6-5-1需要攻丝加工的工件图样 图6-5-2丝锥基本结构
6.5.2 丝锥及选用 丝锥加工内螺纹的一种常用刀具,其基本结构是一个轴向开槽的外螺纹,如图6-5-2所示。螺纹部分可分为切削锥部分和校准部分。切削锥磨出锥角,以便逐渐切去全部余量;校准部分有完整齿形,起修光、校准和导向作用。工具尾部通过夹头和标准锥柄与机床主轴锥孔联接。 攻丝加工的实质是用丝锥进行成型加工, 丝锥的牙型、螺距、螺旋槽形状、倒角类型、丝锥的材料、切削的材料和刀套等因素,影响内螺纹孔加工质量。 根据丝锥倒角长度的不同,丝锥分为:平底丝锥;插丝丝锥;锥形丝锥。丝锥倒角长度影响CNC 加工中的编程深度数据。 丝锥的倒角长度可以用螺纹线数表示,锥形丝锥的常见线数为8~10,插丝丝锥为3~5,平底丝锥为1~1.5。各种丝锥的倒角角度也不一样,通常锥形丝锥为4°~5°,插丝 丝锥为8°~13°,平底丝锥为25°~35°。 盲孔加工通常需要使用平底丝锥,通孔加工大多数情况下选用插丝丝锥,极少数情况下也使用锥形丝锥。总地说来,倒角越长,钻孔留下的深度间隙就越大。 与不同的丝锥刀套连接,丝锥分两种类型:刚性丝锥,见图6-5-3;浮动丝锥(张力补偿型丝锥,见图6-5-4。 浮动型丝锥刀套的设计给丝锥一个和手动攻丝所需的类似的“感觉”,这种类型的刀套允许丝锥在一定的范围缩进或伸出,而且,浮动刀套的可调扭矩,用以改变丝锥张紧力。 使用刚性丝锥则要求CNC 机床控制器具有同步运行功能,攻丝时,必须保持丝锥导程和主轴转速之间的同步关系:进给速度=导程×转速。 除非CNC 机床具有同步运行功能,支持刚性攻丝,否则应选用浮动丝锥,但浮动型丝锥较为昂贵。 浮动丝锥攻丝时,可将进给率适当下调5%,将有更好的攻丝效果,当给定的Z 向进 图6-5-3刚性丝锥 图6-5-4浮动丝锥
FANUC Oi 数控系统里设定参数实现刚性攻丝
设定参数实现刚性攻丝 设定参数实现刚性攻丝 1 两种攻丝方式的比较 以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/反转指令, 然后再编人G84/G74 固定循环 , 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住( 惯量), 攻丝弹簧夹头被压缩一段距离, 而当 Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被 加工件的材质较软( 铜或铝) 时, 螺纹精度将不能得到保证。还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。 刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具( 丝锥 ) 强度允许, 主轴的转速能提高很多,4 000r/min 的主轴速度已经不在话下。加工效率提高 5 倍以上, 螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。 2 刚性攻丝功能的实现 从电气控制的角度来看, 数控系统只要具有主轴角度位置控制和同步功能, 机床就能进行刚性攻丝, 当然还需在机床上加装反馈主轴角度的位置编码器。要正确地反映主轴的角度位置, 最好把编码器与主轴同轴联接, 如果限于机械结构必需通过传动链联接时, 要坚持1:1 的传动比 , 若用皮带, 则非同步带不可。还有一种可能, 那就是机床主轴和主轴电动机之间是直连, 可以借用主轴电动机本身带的内部编码器作主轴位置反馈, 节省二项开支。 除去安装必要的硬件外, 主要的工作是梯形图控制程序的设计调试。市面上有多种数控系统, 由于厂家不同, 习惯各异, 对刚性攻丝的信号安排和处理是完全不一样的。我们曾经设计和调试过几种常
FANUC系统刚性攻丝问题
(图一) 刚性攻丝的实验参数,S=800,F=800,传动比为4:1。 SVGuide选择“XTYT”观测页面,主轴选择“SPEED”观测项目,攻丝轴选择“SYNC”观测项目,采样时间1ms,采样数据点8000~10000 该图的左面有个小的凸台,这其实是主轴从速度环变为位置环时,主轴先执行了回零动作。可以通过NO5202#0=0关闭这个回零的动作。 这个图形表明刚性攻丝的性能仍然不行,因为主轴转速没有达到指令转速,当S=800时,主轴电机转速应该是3200,很显然,图形的红色曲线表明主轴电机的转速大约2500左右,表明电机仍然在加速过程中。需要减小加减速时间常数 NO5241~5244,原值为2400ms,改为800ms后,得到(图二)的曲线。
(图二) 该图形表明,已经取消了主轴回零这个动作,并且在刚性攻丝过程中,主轴电机转速已经达到3200RPM,主轴以 S=800旋转,同时,主轴和攻丝轴Z轴的同步误差小于50个同步脉冲。
(图三) 这是在机床高速档进行的刚性攻丝实验,主轴指令转速1500RPM,高速档传动比1:1,很显然主轴电机没有 达到指令转速,修改加减速时间后,同步误差脉冲猛增(该图未保留),所以该机床高速档不宜进行刚性攻丝。
(图4) 加大了主轴速度环比例增益NO4044,NO4045,以及积分增益4052,NO4053后,它们的初始化值为10,现在改为15,同步误差脉冲有降低。 一点补充,NO5280为攻丝轴Z轴的位置环增益,当NO5280的值不为零时,NO5281~5284无效,此时N05280要和主轴各档的位置环增益相同,即NO4065~4068每个值相等,与NO5280的值相同。 当NO5280为零时,NO5281~5284的值生效,并与NO4065~4068的值对应相等。提高NO5280~5281以及NO4065~4068的值,可以提高刚性攻丝的精度。 在诊断参数DGN452的值不为零时,需要检查NO5280,NO5281~NO5284的值是否与NO4065~NO4068相等或者对应相等。如果DGN452的值在加减速时比较大,需要修改NO5241~5244,增加或减小。 确认已经调试完毕的方法,二者或一即可: 1.DGN453(攻丝轴与主轴同步误差的最大值,%)≈1; 2.DGN450(攻丝轴与主轴同步误差的最大值,检测单位)≤200;