直流电机 仿真
课程设计
课程名称___电力电子技术仿真___ 题目名称__晶闸管直流调速系统参数
和环节特性的测定实验__ 学生学院____信息工程__________ 专业班级__07应用电子技术1班__ 学号_____3107002735_______ 学生姓名_____岑新灿___________ 指导教师______胡清____________
2010 年 6 月24 日
6.1晶闸管直流调速系统参数和环节特性的测定实验
6.1.1 实验目的
(1)熟悉晶闸管直流调速系统的组成及其基本结构。
(2)掌握晶闸管直流调速系统参数及反馈环节测定方法。
6.1.2实验原理
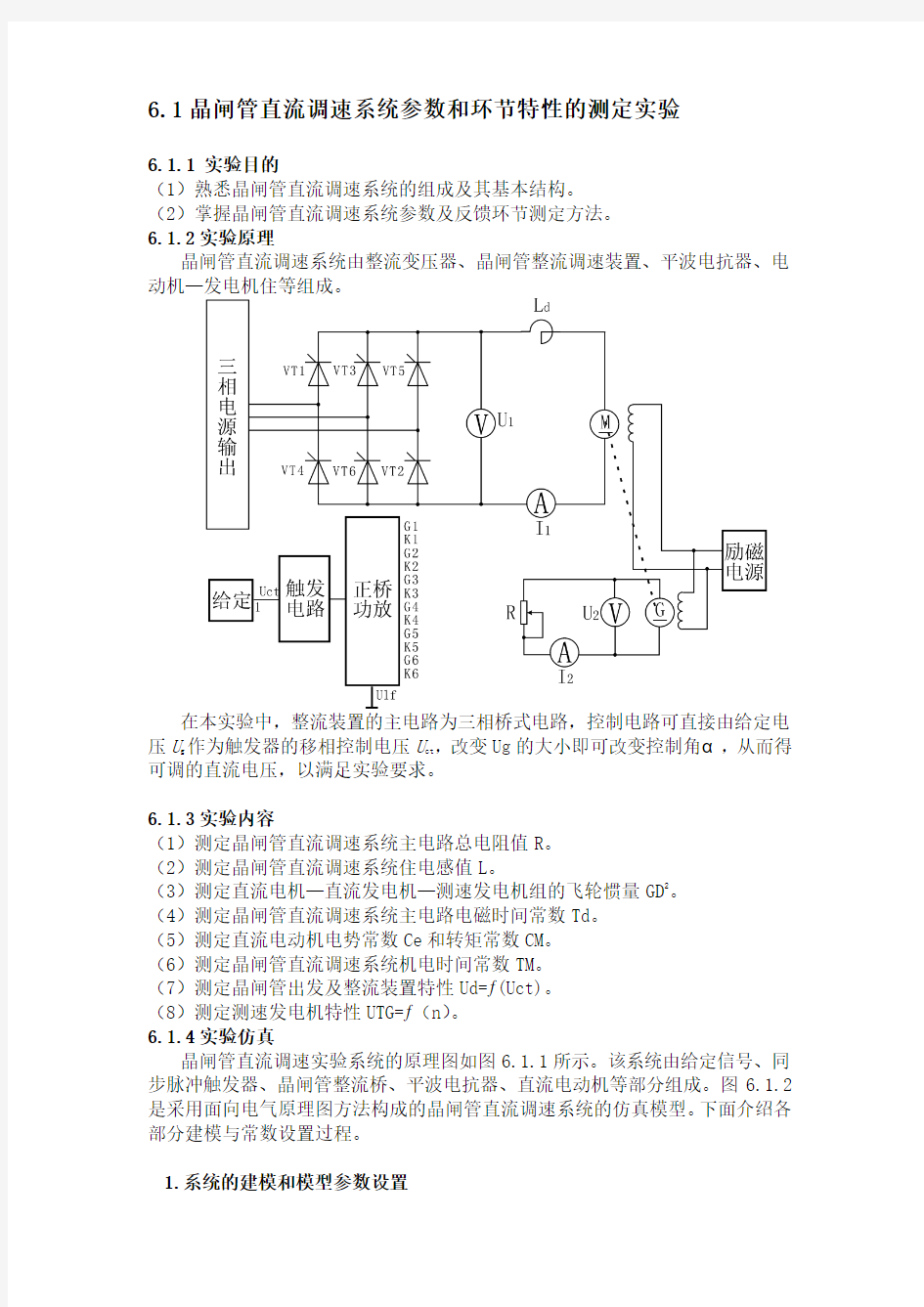
晶闸管直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、电动机—发电机住等组成。
在本实验中,整流装置的主电路为三相桥式电路,控制电路可直接由给定电压U g作为触发器的移相控制电压U ct,改变Ug的大小即可改变控制角α,从而得可调的直流电压,以满足实验要求。
6.1.3实验内容
(1)测定晶闸管直流调速系统主电路总电阻值R。
(2)测定晶闸管直流调速系统住电感值L。
(3)测定直流电机—直流发电机—测速发电机组的飞轮惯量GD2。
(4)测定晶闸管直流调速系统主电路电磁时间常数Td。
(5)测定直流电动机电势常数Ce和转矩常数CM。
(6)测定晶闸管直流调速系统机电时间常数TM。
(7)测定晶闸管出发及整流装置特性Ud=?(Uct)。
(8)测定测速发电机特性UTG=?(n)。
6.1.4实验仿真
晶闸管直流调速实验系统的原理图如图6.1.1所示。该系统由给定信号、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机等部分组成。图6.1.2是采用面向电气原理图方法构成的晶闸管直流调速系统的仿真模型。下面介绍各部分建模与常数设置过程。
1.系统的建模和模型参数设置
系统的建模包括主电路的建模和控制电路的建模两部分
(1)主电路的建模和参数设置
由图6.1.2可见,开环直流调速系统的主电路由三相对称交流电压源、晶闸管整流桥、平波电抗器、直流电动机等部分组成。由于同步脉冲触发器与晶闸管整流桥不可分割的两个环节,通常作为一个组合体来讨论,所以将触发器归到主电路进行建模。
图6.1.2 晶闸管开环直流调速系统的仿真模型
①三相对称交流电压源的建模和参数设置。首先从电源模块中选取一个交流电压源模块,再用复制的方法得到三相电源的另两个电压源模块,并用模块标题名称修改方法将模块标签分别改为“A相”、“B相”、“C相”,然后从连接器模块中选取“Ground”元件和“Bus Bar”元件,按图6.1.1主电路图进行连接。
为了得到三相对称交流电压源,其参数设置方法及参数设置如下。
双击A相交流电压源图标,打开电压源参数设置对话框,在A相交流电压源参数设置中,幅值取220V,初相位设置成0°,频率为50Hz,其他为默认值,如图6.1.3a所示。B、C相交流电源参数设置方法与A相位基本相同,除了将初相位设置成互差120°外,其他参数与A相相同。由此可得到三相对称交流电源。
图6.1.3a Va的参数设置
图6.1.3b Vb的参数设置
图6.1.3c Vc的参数设置
②晶闸管整流桥的建模和参数设置。首先从电力电子模块组中选取“Universal Bridge”模块,并将模块标签改为“晶闸管整流桥”,然后双击模块图标,打开SCR整流桥参数设置对话框,参数设置如图6.1.4所示。当采用三相整流桥时,桥臂数取3,A、B、C三相交流电源接到整流桥的输入端,电力电子元件选择晶闸管。参数设置的原则如下,如果是针对某个集体的变流装置进行设置,对话框中的Rs、Cs、RON、LON、Vf应取该装置中晶闸管元件的实际值,如果是一般情况,不针对某个集体的变流装置,这些参数可先取默认值进行仿真。若仿真结果理想,就可认可这些设置的参数,若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数。这一参数设置原则对其他环节的参数设置也是适用的。
图6.1.4 晶闸管整流桥参数设置
③平波电抗器的建模和参数设置。首先从模块中选取“Series RLC Branch”模块,并将标签改为“平波电抗器”,然后打开平波电抗器参数设置对话框,参数设置如图6.1.5所示,平波电抗器的电感值是通过仿真实验比较后得到的优化参数。
图6.1.5 平波电抗器参数设置
④直流电动机的建模和参数设置。首先从电动机系统模块组中选取“DC Machine”模块,并将模块标签改为“直流电动机”。直流电动机的励磁绕组“F+ - F-”接直流恒定励磁电源,励磁电源可从电源模块组中选取直流电压源模块,
并将电压参数设置为220V,电枢绕组“A+ - A-”经平波电抗器接晶闸管整流桥的输出,电动机经TL端口接恒转矩负载,直流电动机的输出参数有转速n、电枢电流Ia、励磁电流If、电磁转矩Te。通过“示波器”模块观察仿真输出图形。
电动机的参数设计步骤如下,双击直流电动机图标,打开直流电动机的参数设置对话框,直流电动机的参数设置如图6.1.6所示。参数设置的原则与晶闸管整流桥相同。
图6.1.6 直流电动机参数设置
⑤同步脉冲触发器的建模和参数设置。同步脉冲触发器包括同步电源和6脉冲触发器两部分。6脉冲触发器可从附加控制(Extras Control Blocks)子模块组获得。6脉冲触发器需要用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压。同步电源与6脉冲触发器如图6.1.7所示。
图6.1.7 同步脉冲触发器电路
图6.1.8 同步脉冲书法器封装图
至此,根据图6.1.1主电路的连接关系,可建立起主电路的仿真模型,如图6.1.2所示。图中触发器开关信号为“0”时,开放触发器,开关型号为“1”时,封锁触发器。
(2)控制电路的建模和参数设置
晶闸管直流调速系统的控制电路只有一个给定环节,它可以重输入源模块组子中选取“Constant”模块,并将模块标签改为“给定信号”,然后双击该模块图标,打开参数设置对话框,将参数设置为50rad/s。实际调速时,给定信号是在一定范围内变化的,可以通过仿真实践,确定给定信号允许的变化范围。
将主电路和控制电路的仿真模型按照晶闸管直流调速系统电器原理图的连接关系进行模型连接,即可得到图6.1.2所示的晶闸管直流调速系统仿真模型。
2.系统的仿真参数设置
在MATLAB的模型窗口中打开“Simulation”菜单,进行“Simulation Parameters”设置,如图6.1.8所示。
图6.1.8 仿真参数设置
单击“Simulation Parameters”菜单后,得到仿真参数设置对话框,参数设置如图6.1.9所示,仿真中所选择的算法为ode23s。由于实际系统的多样性,不同的系统需要采用不同的的仿真算法,到底采用哪一种算法,可通过仿真实践进行比较选择。仿真“Start time”一般设为0,“Stop time”根据实际需要而定。
3.系统的仿真、仿真结果的输出及结果分析
当建模和参数设置完成后,即可开始进行仿真,在MATLAB的模型窗口打开“Simulation”菜单,单击“Star”命令后,系统开始仿真,仿真结束后可输出仿真结果。单击“示波器”命令后,通过“示波器”模块进行观察仿真输出图形,如图6.1.10所示,其中图6.1.10(a)、(b)、(c)、(d)分别表示直流电动机的电磁转矩Te曲线、电枢电流Ia曲线、角频率ω曲线和角频率ω与电枢电流Ia 的关系曲线。
根据图6.1.2的仿真模型,系统有两种输出方式:当采用“示波器”模块观察仿真输出结果是,只要在系统模型图上双击“示波器”图标即可;当采用“out 1”模块观察仿真输出结果时,可在MATLAB的命令窗口输入绘图命令“plot(tout,yout)”,即可得到未经编辑的输出图形,然后对其输出图形进行编辑。最终可得编辑后的输出图形,如图6.1.11所示。
图6.1.11显示的分别是晶闸管直流调速系统的电流曲线和转速曲线。可以看出,这个结果和实际电动机运行的结果相似,系统的建模与仿真是成功的。在晶闸管直流调速系统建模与
(a)直流电动机电磁转矩Te曲线
(b)直流电动机电枢电流Ia曲线
(c)直流电动机角频率w曲线
(d)直流电动机角频率w和电枢电流Ia的关系曲线
图6.1.11 编辑后的晶闸管直流调速系统的电流曲线和转速曲线仿真结束之际,对建模与常数设置的一些原则和方法归纳如下。
①系统建模时,将其分成主电路和控制电路两部分分别进行。
②在进行常数设置时,晶闸管整流桥、平波电抗器、直流电动机等装置(固有环节)的参数设置原则如下,如果针对某个具体的装置进行参数设置,则对话框中的有关参数应取该装置的实际值;如果是不针对某个具体装置的一般情况,课先取这些参数默认值进行仿真。若仿真结果理想,可认可这些设置的参数;若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数。
③给定信号的变化范围、调节器的参数和反馈检测环节的反馈系统(闭环系统中使用)等可调参数的设置,其一般方法是通过仿真实验,不断进行参数优化。具体方法是分别设置这些参数的一个较大和较小值进行仿真,弄清它们对系统性能洋相的趋势,据此逐步将参数进行优化。
④仿真实践根据实际需要而定,以能够仿真出完整的波形为前提。
⑤由于实际系统的多样性,没有一种仿真算法是万能的。不同的系统需要采用不同的仿真算法,到底采用哪一种更好,这需要通过仿真实践,从仿真能否进行、仿真的速度、仿真的精度等方面进行比较选择。
6.1.5.总结
1.关于仿真算法的选择
图6.1.12 系统错误提示
图6.1.13 仿真算法的选择
系统提示应该选取ode23tb或者ode15s,但经过试验,凡是ode23都行,不一
根据试验,算法会影响仿真时间,用ode23tb是最快的。
2.关于同一算法下运行时间的改进
图6.1.14 采样时间与步幅大小设置
在直流电机的参数设置里面(我到现在也不知道为何有的电机的参数设置会有sample time,而有的电机参数设置里面没有)有sample time选项,是用来确定采样时间的。而运行环境simulation paremeters里面有min step size。经试验得知,min step size的数值是不能超过sample time的数值的,不然会
出错。
图6.1.15 运行出错
这个设置下系统运行仿真,由于min step size比sample time要大,系统提示出错:Minimum step size(9.999e-005)is larger than the fastest discrete sampling period(1e-005)time.
min step size在sample time下尽量设置大一点,那么仿真时间会缩短,但应该要考虑仿真精度,不能一味地增大最小步幅的数值,否则曲线的锯齿会变得明显,曲线不平滑,仿真精度不高,甚至可能导致仿真出错。
4.直流电机的运行参数
电枢电流Ia峰值为370左右,稳定值为28,调节时间为0.85秒
电磁转矩Te峰值为650,稳定值为50,调节时间为0.95秒
角频率w稳定值为142,调节时间为0.69秒
当给定信号越小,Ia、Te最大值越大,稳定后的值越小;w稳定后的值越大。如当信号为10时,Te的最大超调,即其最大值为800,稳定值约15;Ia的最大超调是480,稳定值约15;w稳定后值约为218。波形与信号为50相似,只是幅值发生变化
5.直流电动机调速方法:
(1)电枢回路串入调节电阻。导致机械特性变软,调速范围不大,不是无级调速。
(2)改变电枢电压。无级调速,机械特性硬度不变,调速范围大,常用于恒转矩负载。无需其他设备。
(3)改变励磁电流即改变磁通Φ。无级调速,只能弱磁调速。调速特性变软。调速范围不大。
6.1.6 心得
自从上学期用simulink仿真了鼠笼电机之后,到现在才再次用simulink仿真,这次仿真是对simulink的熟悉和巩固。两次仿真的内容都不一样,也是一次新的学习,而且这次又发现新问题,有新发现。比如仿真算法跟采样时间那里。这次仿真实验巩固了晶闸管的特性的学习,加深对晶闸管的了解,完成了实验课上没有的实验仿真。而且由于实验课上仪器问题吧,很多的实验结果都不大理想,这次仿真起到了补充和再认识的作用。