simufact.welding焊接模拟教程

simufact.welding焊接模拟教程
案例文件,请使用simufact.welding3.1.0及以上版本打开
之前一直都是发的forming的教程,而simufact.welding网上的资料相对较少,其实simufact.welding软件也是一款很不错的软件,以往我们做焊接非线性大多数都是用marc,但是marc那个不人性化的界面,以及建模的复杂,让新手们望而却步。simufact基于marc和ife.weldsim两个求解器,取长补短,开发了极易使用的焊接模拟软件,今天我就带大家一起来体验一下吧。欢迎捧场噢!
1、打开simufact.welding3.1.0软件。点击新建按钮创建一个新的仿真模拟。
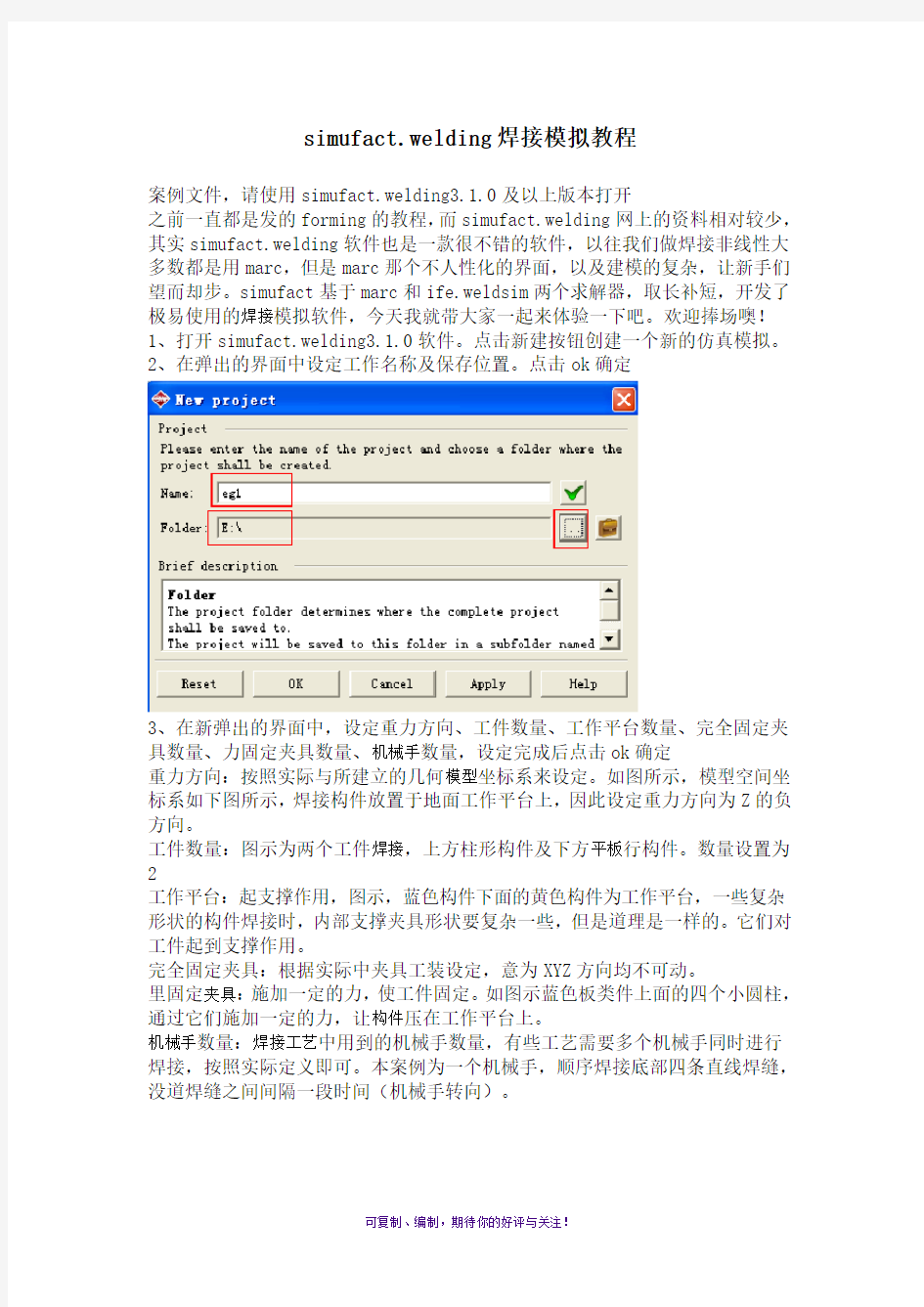
2、在弹出的界面中设定工作名称及保存位置。点击ok确定
3、在新弹出的界面中,设定重力方向、工件数量、工作平台数量、完全固定夹具数量、力固定夹具数量、机械手数量,设定完成后点击ok确定
重力方向:按照实际与所建立的几何模型坐标系来设定。如图所示,模型空间坐标系如下图所示,焊接构件放置于地面工作平台上,因此设定重力方向为Z的负方向。
工件数量:图示为两个工件焊接,上方柱形构件及下方平板行构件。数量设置为2
工作平台:起支撑作用,图示,蓝色构件下面的黄色构件为工作平台,一些复杂形状的构件焊接时,内部支撑夹具形状要复杂一些,但是道理是一样的。它们对工件起到支撑作用。
完全固定夹具:根据实际中夹具工装设定,意为XYZ方向均不可动。
里固定夹具:施加一定的力,使工件固定。如图示蓝色板类件上面的四个小圆柱,通过它们施加一定的力,让构件压在工作平台上。
机械手数量:焊接工艺中用到的机械手数量,有些工艺需要多个机械手同时进行焊接,按照实际定义即可。本案例为一个机械手,顺序焊接底部四条直线焊缝,没道焊缝之间间隔一段时间(机械手转向)。
4、在软件catalog空白区域点击鼠标右键,在弹出的对话框中选择Geometries(几何)——Import(导入),然后在弹出的对话框中选择要导入的几何模型,可以一次性导入所有模型,在后面弹出的单位选择对话框中选择你建模时所用的单位,然后将use for all geometries前面勾选,意为所有几何模型的单元都采用当前单位。注意:导入的必须是划分好的网格,因为,焊接仿真需要质量比较好的单元,目前simufact.welding软件只支持六面体单元的计算,所以需要大家自己通过网格划分工具进行网格划分,预计下一个版本的软件中会带有自动网格划分工具,但是如果你想将仿真做准确,最好不要用自动划分的单元,还是麻烦一点手动建模吧。
5、将catalog里面的几何模型用鼠标左键拖动到Explorer的进程树相应位置中。注意:鼠标左键选中一个模型,一直按住鼠标左键,拖动到进程树相应位置下面。工件模型拖动到代表工件的图标下面,完全固定的夹具拖动到fix固定夹具下面,力控制夹具拖动到clamp图标下面,没有先后顺序之分。
拖动好之后,会在右侧模型显示区出现模型示意图,在示意图区域,鼠标左键为移动,右键为旋转,中间滚轮为缩放
6、在catalog区域点击鼠标右键,选择Material——library,从材料数据库
中选择20MnCr5_sw材料。点击ok确定。
7、将Materials下方的材料20MnCr5_sw拖动到进程树web、plant及Robot下方。
8、定义焊缝路径,假设我们要定义如下图所示的焊接方向及顺序。首先在进程树中将plant前面的勾去掉,将plant隐藏起来。
9、catalog空白区域点击鼠标右键选择Sets——New node set选取焊缝节点。然后在模型示意图区域按住键盘Ctrl键,使用鼠标左键拾取上图所示第一条焊缝的节点。拾取完成后点击节点列表界面下方apply changes to node set。同理,依次拾取其它焊缝节点。
10、焊缝参数定义及生死单元设置,在catalog空白区域点击鼠标右键,选择Trajectories——form node set,从节点生成焊缝路径。选择第一条焊缝节点,点击ok确定。