极坐标法测碎部点
极坐标法测定碎部点
一、实验目的
我们学生巩固、扩大和加深从课堂学到的理论知识,获得实际测量工作的初步经验和基本技能,进一步掌握全站仪的操作方法,提高计算和绘图能
力,对测绘小区域大比例尺地形图的全过程有一个全面和系统的认识,并在实习的过程中增强其独立工作与团队协作意识,为今后解决实际工作中的有关测量问题打下坚实的基础。
二、实验要求
1.熟悉掌握全站仪的基本操作
2.学会利用全站仪进行极坐标测量的方法
3.利用极坐标法进行进行碎部点的测量
三、实验原理及步骤
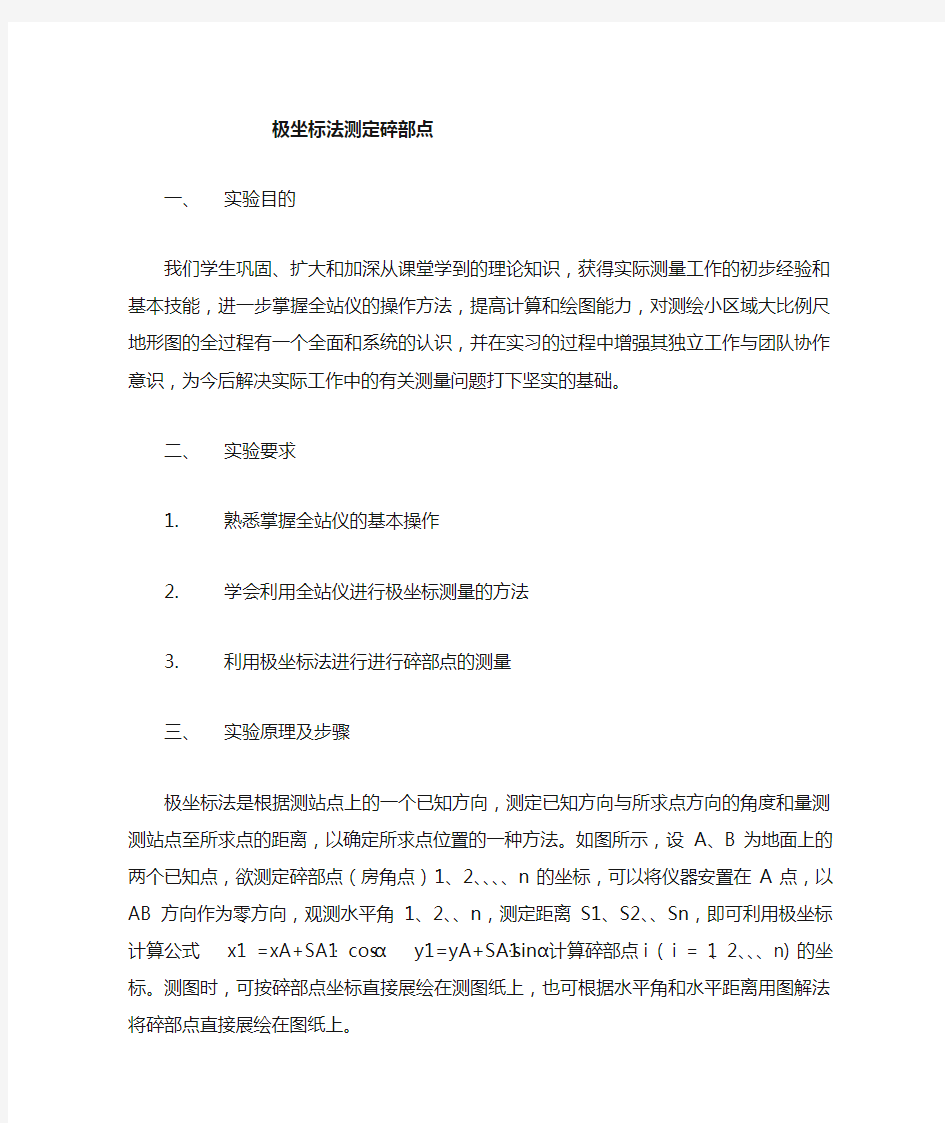
极坐标法是根据测站点上的一个已知方向,测定已知方向与所求点方向的角度和量测测站点至所求点的距离,以确定所求点位置的一种方法。如图所示,设A、B为地面上的两个已知点,欲测定碎部点(房角点)1、2、、、、n 的坐标,可以将仪器安置在A点,以AB方向作为零方向,观测水平角1、
2、、n,测定距离S1、S2、、Sn,即可利用极坐标计算公式 x1
=xA+SA1 · cosɑ y1=yA+SA1·sinɑ计算碎部点i ( i = 1、2、、、n) 的坐标。
测图时,可按碎部点坐标直接展绘在测图纸上,也可根据水平角和水平距离用图解法将碎部点直接展绘在图纸上。
当待测点与碎部点之间的距离便于测量时,通常采用极坐标法。极坐标法是一种非常灵活的也是最主要的测绘碎部点的方法。例如采用经纬仪、平板仪测图时常采用极坐标法。极坐标法测定碎部点时,适用于通视良好的开阔地区。碎部点的位置都是独测定的,因此不会产生误差积累。
四、实验总结
由于全站仪的普及,使得极坐标法得到广泛普及,它可以直接测定并显示碎部点的坐标和高程,极大提高了碎部点的测量速度和精度,在大比例尺数字测图中被广泛采用。
极坐标公式和三角函数万能公式
极坐标与参数方程综合复习 一 基础知识: 1 极坐标),(θρ。逆时针旋转而成的角为正角,顺时针旋转而成的角为负角。 点),(θρP 与点),(1θρ-P 关于极点中心对称。 点),(θρP 与点),(2πθ ρ+-P 是同一个点。 2 直角坐标化为极坐标的公式:.sin ;cos θρθρ==y x 极坐标化为直角坐标的公式:x y y x = +=θρtan ;222 注意:1 πθρ 20,0<≤> 2 注意θ的象限。 3圆锥曲线的极坐标方程的统一形式: 间的距离。 是对应的焦点与准线之是离心率,p e 时表示双曲线。时表示抛物线;时表示椭圆;1110>=<
任意点极坐标法测设曲线
任意点极坐标法测设曲线 随着测距仪、全站仪的普及应用,任意点击坐标法测设曲线,已在生产者中得到了广泛应用。用这种方法的优点是:设站灵活,不受地形条件限制,主点和曲线点可同时测设。但应注意,由于测点彼此独立,应采用一定的方法检核,起点为误差不应大于5cm。 一、任意点极坐标法测设曲线的原理 如图1-1所示,M、N为已知的平面控制点,A 、B、C为待定曲线点,设M、N、A、B、C点在相同坐标系下的坐标均已知,则根据坐标反算可得坐标方位角:αM,N、αM,A、αM,B、αM、C。水平距离D M,A、D M,B、D M,C。测设时,置镜于M点,后视N点定向,定向后视读数配置为αM,N;旋转仪器当平盘读数为αM,A时,于视线方向上测设D M,A,得A 点;用同样方法可测出B、C等点。
1-1任意点极坐标法测设曲线原理 由此可见,任意点极坐标法测设曲线的关键问题是:统一坐标系下控制点、曲线点的坐标计算;测设数据计算。 一、 坐标计算 坐标系的建立主要取决于控制点的情况。如果控制点是为测设曲线而布设的,则坐标系一般采用ZH-xy 坐标系;如果控制点是既有控制点(如初测导线点),则控制点所在的坐标系就是统一坐标系,即既有坐标系统。 1. ZH-xy 测量坐标系下曲线点坐标计算 如图1-2所示,以始端缓和曲线ZH 为原点,以ZH 切线为X 轴,且指向交点方向为正向,建立测量中的平面直角坐标系ZH-xy ,则在此坐标系下,ZH-HY 段曲线点的坐标为: 错误!未找到引用源。 式1-1 错误!未找到引用源。 式中,l A 为A 点到缓和曲线起点的曲线长;l o 为缓和曲线长;R 为圆J α
全站仪极坐标放样施工工法
全站仪极坐标放样施工工法 一、前言 全站仪,即全站型电子速测仪。它是随着计算机和电子测距技术的发展,近代电子科技与光学经纬仪结合的新一代既能测角又能测距的仪器,它是在电子经纬仪的基础上增加了电子测距的功能,使得仪器不仅能够测角,而且也能测距,并且测量的距离长、时间短、精度高。全站型电子速测仪是由电子测角、电子测距、电子计算和数据存储单元等组成的三维坐标测量系统,测量结果能自动显示,并能与外围设备交换信息的多功能测量仪器。由于全站型电子速测仪较完善地实现了测量和处理过程的电子化和一体化,所以人们也通常称之为全站型电子速测仪或称全站仪。 随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种。全站仪极坐标法放样技术,能准确、方便的进行平面建筑网的控制,测量精度高、速度快、操作简便、安全、实用、不受场地限制、可直接放样,避免了繁琐的计算,值得在工程建设中推广应用。 二、工法特点 1. 实现了全站仪与计算机的双向通讯,测量人员只需要将全站仪瞄准相应目标,点取相应的按钮即可。避免了数据抄记、输入过程中的错误,简化了外业步骤,其数据处理快速准确、测量精度高、节省人工。
2. 能及时得出点位坐标和偏差信息,还可以结合放样点坐标进行反算,随时得出建议、纠正量,不受个人主观影响,便于操作指挥放样工作。 3. 建立了控制点、放样点的数据库,能方便地进行点位坐标以及实测资料的查询、管理,其定方位角快捷。 4. 仪器体积小重量轻,灵活方便,较少受到地形限制,且不易受处界因素的影响。 三、适用范围 1、全站仪极坐标放样施工,适用于各种土建、道桥施工放样,距离测量等;尤其是平面、立面复杂的施工测量,更能体现其优越性。 四、施工工艺 接合我公司在上海龙腾广场工程中运用全站仪极坐标放样施工的经验,我们对全站仪极坐标放样施工工艺作如下阐述: 1、工艺流程 利用AUTOCAD捕捉各控制点坐标→控制点位埋设→仪器安置与定向→控制点测定→坐标计算→测量成果提交→确定测量方法和线路→柱子、墙体、梁等轴线的定位放线→定位放线的质量控制 2、施工过程中应注意的问题 (1)施工准备 按要求,对全站仪等进行检测、校验和标定,使用满足使用规范标准的测量设备,确保工程总体质量、进度。 (2)施工操作 1)在建筑总平面图的电子文件中,先利用CAD捕捉、查询功能将所需要点的坐标自动捕捉下来。
极坐标法隧道断面测量
简介:隧道施工断面测量工作,不需专用软件,采用立面坐标法也能及时为施工提供可靠测量数据,准确的指导施工。三维坐标段落法,只需测量任意位置的三维坐标即可计算其偏差。 关键字:隧道断面测量立面坐标法三维坐标段落法 前言 隧道施工中各种工序衔接紧凑,平行作业、交叉施工的工程很多,且洞内作业面狭小,如排风不畅,空气质量差,红外线测量仪器反射信号太弱,往往无法进行测量工作。测量工作在隧道开挖施工中非常重要,它控制着隧道开挖的平面、高程和断面几何尺寸,关系到隧道的贯通。为满足测量工作需要,需选择关键工序工作面污染小的时间,停止一些次要工序,提前加大排风来满足测量工作条件。若测量工作占用时间过长,将直接影响工程进度和经济效益。如何及时、准确的提供测量成果,使用的仪器和方法便成了重要因素。花几十万买一台隧道断面仪,仅能用于隧道断面测量,投资太大,为节省投资可采用全站仪配隧道断面测量软件来完成。用全站仪进行外业数据采集后,再对采集的数据进行分析。数据分析可用台式、便携电脑,也可用可编程计算器进行。现将三数据分析方法列于表-1,从表-1可以看出,采用可编程计算器进行分析,内外业用时最少,测量 工作对工程作业时间影响最小。本文将对这种方便、快捷的测量和计算方法进行 分析与介绍。 隧道断面单点测量耗时比较 表表-1 1极坐标断面测量法 1.1极坐标系的建立 图—1是一个隧道断面,垂直方向(高程)为纵轴,用H表示;水平方向(距线路中线的距离)为横轴,用B表示。
图---1 圆心纵坐标等于路线设计高程减设计高程线至隧道中心的距离乘横坡比,加圆心至路面的高度。用公式(1-1)表示。 O=S-b×i+h=S-4.11×0.02+1.69 (1--1) 圆心横坐标等于10m(假定线路中心横坐标为10米)。加线路中心至隧道中心的距离 1.2数据采集: 1.2.1待测断面站点放样 可放出路中线、隧中线或距路中线任意宽度的点位,记录其地面高程、线路中线至待测断面站点的距离等。 1.2.2断面测量 仪器置于待测断面,(竖直度盘定天顶方向为0度,顺时针注记)望远镜瞄准另一导线点或中线点定向后,转仪器正镜瞄准线路边线法线方向,也就是保证测量的竖直角读数,线路中线一侧为270-360度,线路边线一侧为0-90度。记录仪器高、观测的竖直角、斜距。根据个人习惯,亦可记录水平距离和高差。如隧道内
施工测量方案极坐标法
智能医疗设备研发生产项目 施 工 测 量 方 案 编制人: 审核人: 审批人: 2017年5月27日
目录 第一章编制依据 0 第二章工程概况 0 第三章施工组织及设备配置 0 第四章测量放线基本准则 (1) 第五章测量准备 (1) 第六章平面控制点的布置与施测 (2) 第七章轴线及各控制线的放样 (5) 第八章轴线及高程点放样程序 (13) 第九章施工时的各项限差和质量保证措施 (14) 第十章竣工测量与变形观测 (15) 第十一章质量控制 (16) 第十二章安全管理及安全保护措施 (17)
第一章编制依据 1、智能医疗设备研发生产项目工程施工组织设计 2、智能医疗设备研发生产项目工程施工蓝图、基坑支护设计图 3、《工程测量规范》GB50026-2007 4、《高层建筑混凝土结构技术规程》JGJ3-2010 5、江苏溧阳城建集团有限公司质量保证手册及有关程序文件 第二章工程概况 1、工程名称:智能医疗设备研发生产项目 2、工程地点:西安市尚林路以南、草滩六路以西 3、建设单位:西安天隆科技有限公司 4、设计单位:中国城市建设研究院有限公司 5、勘察单位:中国有色金属工业西安勘察设计研究院 6、监理单位:陕西华营工程建设监理有限公司 7、施工单位:江苏溧阳城建集团有限公司 8、工程标高:本工程1#厂房、8#厂房、9#厂房、10#厂房、11#办公楼、12#厂房的±0.000相当于绝对标高分别为375.270、375.350、375.200、374.900、375.200、375.200。本工程所有相对标高均以8#厂房±0.000标高为基准。 9、本工程主体为钢筋混凝土框架结构,约54316.2平方米。其中地下一层(汽车库、设备用房):12513.08m2;1#厂房:7375.48m2;8#厂房:6106.76m2;9#楼:5897.56m2;10#楼:5542.66m2;11#楼:8100.07m2;12#楼:8780.59m2。 建筑楼层:1#厂房地上5层、地下1层;8#厂房地上5层、地下1层;9#厂房地上5层、地下1层;10#厂房地上5层、地下1层;11#办公楼地上6层、地下1层;12#厂房地上6层、地下1层。 建筑高度:1#厂房23.45m;8#厂房23.45m;9#厂房23.45m;10#厂房23.45m;11#办公楼27.95m;12#厂房27.95m。 建筑工程结构安全设计等级:二级,设计使用年限:50年。建筑耐火等级为:一级。屋面防水等级:Ⅱ级。抗震设防烈度:8度,设计基本地震加速度为0.20g。建筑使用功能:1#、8#、9#、10#、12#楼为厂房、11#楼为办公用房,各主楼地下室为设备用房,中心区域为车库。 施工单位进场时,与建设单位坐标和高程控制点已办理交接手续,共二个坐标和黄海高程控制点。位于场地东侧的草滩六路旁,1#点(BM1坐标:X=21917.997、Y=6090.271;高程:374.044m);2#点(BM2坐标:X=21995.614、Y=6052.690;高程:374.089m); 第三章施工组织及设备配置 1、主要仪器的配备情况
测量学计算题及答案
五、计算题 5.已知某点位于高斯投影6°带第20号带,若该点在该投影带高斯平面直角坐标系中的横坐标y=,写出该点不包含负值且含有带号的横坐标y及该带的中央子午线经度 L。 1.已知某地某点的经度λ=112°47′,试求它所在的6°带与3°的带号及中央子午线的经度是多少 2.根据下表中的观测数据完成四等水准测量各测站的计算。
3.完成下表测回法测角记录的计算。 4.试算置仪器于M点,用极坐标法测设A点所需的数据。
已知300°25′17″,X M =,Y M =,X A =,Y A =,试计 五、计算题 1.某工程距离丈量容许误差为1/100万,试问多大范围内,可以不考虑地球曲率的影响。 2.调整下列闭合水准路线成果,并计算各点高程。 其中:水准点的高程H BM1 = 水准测量成果调整表 测点测站数 高差值 高程 m 备注观测值 m 改正数 mm 调整值m BM 1 N 1 N 2 N 3
N 4 BM 1 ∑ 实测高差∑h= 已知高差=H 终-H 始=0 高差闭合差f h = 容许闭合差f h 容== 一个测站的改正数= 3. 完成下表竖直角测量记录计算。 测站 目 标 竖 盘 位 置 竖盘读数 ° ′ ″ 半测回角值 ° ′ ″ 一测回角值 ° ′ ″ 指标 差 竖盘形式 O M 左 81 18 42 全圆式 顺时针 注记 右 278 41 30 N 左 124 03 30 右 235 56 54 4. 一根名义长为30米的钢尺与标准长度比较得实际长为米,用这根钢尺量得两点间距离为米,求经过尺长改正后的距离。
极坐标法点放样
工程测量实习报告 ———经纬仪极坐标放样 班级:测量10029班 学号: 10040232910 姓名:张浩 指导老师:杨晓平
一、实训目的 为了更好的将理论与实践相结合,安排了本次的教学实训,本次实训是使用全站仪进行一般极坐标点位实地放样实训。通过现场的实际操作能够使我们更熟练的掌握极坐标法一般点位放样。 二、班级、时间、地点 (一)实习班级和时间 测量10029班(第八周、4月10号) (二)实习地点 杨凌职业技术学院南校区 三、放样数据 =3992.798 (一)、放样点坐标:X P =5695.600 Y P =3923.008 (二)、测站坐标:X A =5607.606 Y A =3972.102 后视点坐标:X M Y M=5458.367
方位角:α =288°12′33″ AM αAP=51°34′52″ -αAP=236°37′41″ 水平夹角:β=α AM 距离:D=Y 2 =112.310 △2 X △ 四、实习过程 一、极坐标法一般点位放样 (一)、操作步骤: 1、将仪器安置于点A,在M点立照准目标定向,读为取水32°22′18″ 2、顺时针转动照准部,使水平度盘读数为268°59′59″ 3、沿视线方向用钢尺量取距离D:112.310米,标定P点(二)、附图 A△ P 1 P2 M△
二、归化放样 1、用一般放样方法标定点P 1 2、方向归化,用测回法测出β 测 =268°59′48″ △β=β-β 测 =268°59′59″-268°59′48″=+11″ 归化△β,顺时针微调(外测)+11″,标定P 2 3、距离归化,量取 A P 2为D 测 ,△ D=D-D 测 =112.310-112.285=0.015米,沿视线方向量△D,标 定P 3 4、检核△β、△D,若误差不符合要求则继续归化 四、实训总结 通过本次实习,使我们将以前学习的坐标测量知识转换为坐标的放样。将理论和实践进行结合,了解测绘和测设的区别,将地形测量的知识和工程测量的知识进行融合。使得两者相结合,即会测坐标点也会放坐标点。 用经纬仪极坐标发放样出设计坐标,并对放样出的角度和距离进行测量,比较误差和精度。让我学到了很多实实在在的东西,对以前零零碎碎学的测量知识有了综合应用的机会,工程测量测设过程有了一个良好的了解。学会了运用经纬仪的基本测设方法等在课堂上无法做到的东西以及更熟练的使用经纬仪,也对钢尺量距的知识进行了回顾。很好的巩固了理论教学知识,提高实际操作能力,同时也拓展了与同学之间的交际合作的能力。
《极坐标法测设圆曲线》教学设计(教师用)
《极坐标法测设圆曲线》教学设计(教师用) 授课教师 课程名称 道路线路施工测量 项目2线路中线 学习单元 任务2.2 极坐标法测设圆曲线 学时 讲课4h,实作(课内6h,课外26h) 学习目标 通过案例教学使学生学会极坐标法测设圆曲线的程序、内容及实施;能利用现有的 测量仪器设备组织实施极坐标法测设圆曲线 主要内容描述 线路通常是由直线元、缓和曲线元、圆曲线元组成,本任务主要学习由直线和圆曲线组合的直线-圆曲线-直线的形式的曲线要素计算、主点里程推算、极坐标法测设圆曲线的原理及测设资料的计算。 教学参考资料 ①极坐标法测设圆曲线讲义 ②《工程测量概论》西安地图出版社 李孟山主编 ③《工程测量规范》 ④《铁路工程测量规范》 TB 10101-2009 J961-2009 中国铁道出版社出版 教师具备的能力 ①能熟练操作经纬仪、全站仪; ②能根据设计单位给定的直线、曲线转角表计算圆曲线段逐桩坐标 ③会利用CASIO-5800计算器、EXCEL 表、VB 编写圆曲线逐桩坐标程序; ④熟悉《铁路测量》规范。 项目保障条件 1、 教学条件要求 ①多媒体教室; ②极坐标法测设圆曲线PPT ③《新建铁路施工测量规范》 ④《**高速公路线路平面设计资料) 2、 实训条件 ①(ppm 22,2+''±)全站仪6台; ③2公里线路测量实训场; 学习重点与难点 1.学习重点: ①圆曲线测设点位坐标计算; ②圆曲线测设方法; 2.学习难点: ①圆曲线测设点位坐标计算; 教学方法建议 引导文法、头脑风暴法、讨论法、任务驱动教学法 教 师 学 生 教 学 实 施 建 议 构思 (课内4h,课外6h) 1. 结合班级学生学习状况,划分任务学习小组(建议6人一组),设组长一名; 2. 首先结合石黄高速公路案例,给每个小组,下发极坐标法测设圆曲线任务(课外30m ); 3.结合本节任务给学生下发知识关键点,使学生通过网络、讲义、案例、讨论对关键知识点初步了解(课外1h ); 4.每个小组简要汇报对知识点了解情况 1.组长召集小组成员,布置小组分工; 2.课前以小组为单位,通过网络、讲义、《规范》、案例、思考、讨论、督促预习如下内容: ①在地面上如何表示一个半径为500米的圆弧; ②如何进行两个坐标系下坐标变换; ③求一个点的坐标需要已知哪些数据; ④如何计算圆心坐标;
极坐标误差分析
关于2秒级全站仪极坐标法用于变形观测的精度分析 一、极坐标法测量原理 如图所示,A 、B 为已知点,A 点坐标为(x A ,y A )、B 点坐标为(x B ,y B ),p 为待定 极坐标测量法示意图 点。通过测定AB 边与Ap 边的夹角β,Ap 边垂直角ν以及Ap 边的斜距S ,可通过计算出AB 边坐标方位角αAB 和Ap 边平距D ,求得p 点的坐标y x 、。计算式如下: A B A B x x y y arctg --=AB α………………………………………………① βαα+=AB …………………………………….…….…………. ② νcon S D ?= ………………………….………………….……… ③ αα sin D D Ap A Ap A y y con x x +=+=}………………………………………………...④ 二、极坐标法测量精度分析 由于S 、、νβ是独立观测值,D 、α也是相互独立的。对以上②、③微分得 βαd =d ……………………………………………………………⑤ ρν ννd S dS con dD ??-?=sin ……………………………………...⑥ 再对④微分得 ρ αααρα ααd o d dy d d con dx ??+?=??-?=n c D D sin sin D D }……………………………………⑦ 上式可写为 ????????????????? ??-=??????ααρααραd dD con D D con dy dx sin sin ………………………………….⑧
因此,p 点的协方差阵为 ??? ?????-????????????????????-=????????αραραασσσσαρααρασσσσαααcon D D con con D D con D D D y yx xy x sin sin sin sin 2222 其显式形式为 222 222 2222222 2222222sin )s co (sin sin 2s sin sin 2co α ααααασααρσααρσαασσαρσααρ σασσαρσααρσασ???-?-+??=??+??+?=??+??- ?=con D in n D con con D con D in D con D n D D xy D D y D D x 由以上显式,可推出P 点的方差 2222222ασρσσσσ?+ =+=D D y x p 写成中误差形式即为 2222 αρm D m m D p ?+±=……………………………………………………..⑨ 三、极坐标法测量误差估算 按照仪器的标称精度,测角精度为±2″、测距精度为2+2ppm ,当已知点至待定点之间间距为100m 时,取 510222?≈±=''±==ρφα,,mm m m m S 将⑥式按照误差传播定律写成 2222222sin ρνννm S m con m S D ? ?+?= 取 2100m S 3''±==?=ννm ,, 估算Ap 边平距测量误差: mm con m D 00.22052.02)102(23sin 1023222252 2 2522±=±≈+±≈????+??±=? 当点间高差较小时,垂直角测量误差对平距的影响可忽略不计;取ν为15°时,平距测量误差为±2.06mm 。可见垂直角大小对平距测量精度影响不大,只取决于测距本身精度,
测量极坐标法
二、极坐标法 极坐标法是根据一个角度和一段距离测设点的平面位置。当建筑场地开阔,量距方便,且无方格控制网时,可根据导线控制点,应用极坐标法测设点的平面位置。如图9-7所示,A 、B 、C 为地面已有控制点(导线点),其坐标(A A y x 、)、(B B y x 、)、(C C y x 、)均为已知。P 为某建筑物欲测设点,其坐标(P P y x 、)值可从设计图上获得或为设计值。根据A 、B 、P 三点的坐标,用坐标反算方法求出夹角β和距离AP D ,计算公式如下: 坐标方位角 A B A B AB AB x x y y --=-1tan αα (9-11) A p A P AP AP x x y y --=-1tan αα (9-12) 两方位角之差即为夹角β: AP AB ααβ-= (9-13) 两点间的距离AP D 为: ()()22A P A P AP y y x x D -+-= (9-14) 【例题9-5】已知A、B为控制点,其坐标值为=A x 858.750m 、A y =613.140m ;B x =825.432m 、B y =667.381m ;P 点为放样点,其设计坐标为P x =430.300m 、P y =425.000m 。计算在A 点设站,放样P 点的数据。 A B A B AB AB x x y y --=-1tan αα==---750.858432.825140.613381.667tan 1AB α121°33′38″ A p A P AP AP x x y y --=-1tan αα==---750.858300.430140.613000.425tan 1AP α203°42′26″
极坐标系与极坐标方程
一、坐标系 1、数轴 它使直线上任一点P 都可以由惟一的实数x 确定 2、平面直角坐标系 在平面上,当取定两条互相垂直的直线的交点为原点,并确定了度量单位和这两条直线的方向,就建立了平面直角坐标系。它使平面上任一点P 都可以由惟一的实数对(x,y )确定。 3、空间直角坐标系 在空间中,选择两两垂直且交于一点的三条直线,当取定这三条直线的交点为原点,并确定了度量单位和这三条直线方向,就建立了空间直角坐标系。它使空间上任一点P 都可以由惟一的实数对(x,y,z )确定。 二、平面直角坐标系的伸缩变换 定义:设P (x ,y )是平面直角坐标系中的任意一点,在变换???>=>=). 0(')0(,':μμλλφy y x x ④的作用下,点P (x ,y )对应到点P ’(x ’,y ’),称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换。 三.例题讲解 例1 在平面直角坐标系中,求下列方程所对应的图形经过伸缩变换后的图形。 (1)2x+3y=0; (2)x 2+y 2=1 三、极坐标系 1、极坐标系的建立: 在平面上取一个定点O ,自点O 引一条射线OX ,同时确定一个单位长度和计算角度的正方向(通常取逆时针方向为正方向),这样就建立了一个极坐标系。 (其中O 称为极点,射线OX 称为极轴。) 2、极坐标系内一点的极坐标的规定 对于平面上任意一点M ,用 ρ 表示线段OM 的长度,用 θ 表示从OX 到 OM 的角度,ρ 叫做点M 的极径, θ叫做点M 的极角,有序数对(ρ,θ)就叫 做M 的极坐标。 特别强调:由极径的意义可知ρ≥0;当极角θ的取值范围是[0,2π)时,平面上的点(除去极点)就与极坐标(ρ,θ)建立一一对应的关系 .们约定,极点的极坐标是极径ρ=0,极角是任意角. 3、负极径的规定 在极坐标系中,极径ρ允许取负值,极角θ也可以去任意的正角或负角 当ρ<0时,点M (ρ,θ)位于极角终边的反向延长线上,且OM=ρ。 M (ρ,θ)也可以表示为))12(,()2,(πθρπθρ++-+k k 或 )(z k ∈ 4、数学应用 例1 写出下图中各点的极坐标 A (4,0) B (2 ) C ( ) D ( ) E ( ) F ( ) G ( ) 规定:极点的极坐标是ρ=0,θ可以取任意角。 变式训练
全站仪极坐标放样施工方法经验介绍
全站仪极坐标放样施工方法经验介绍 一、前言 全站仪,即全站型电子速测仪。它是随着计算机和电子测距技术的发展,近代电子科技与光学经纬仪结合的新一代既能测角又能测距的仪器,它是在电子经纬仪的基础上增加了电子测距的功能,使得仪器不仅能够测角,而且也能测距,并且测量的距离长、时间短、精度高。全站型电子速测仪是由电子测角、电子测距、电子计算和数据存储单元等组成的三维坐标测量系统,测量结果能自动显示,并能与外围设备交换信息的多功能测量仪器。由于全站型电子速测仪较完善地实现了测量和处理过程的电子化和一体化,所以人们也通常称之为全站型电子速测仪或称全站仪。 随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种。全站仪极坐标法放样技术,能准确、方便的进行平面建筑网的控制,测量精度高、速度快、操作简便、安全、实用、不受场地限制、可直接放样,避免了繁琐的计算,值得在工程建设中推广应用。 二、方法特点 1.实现了全站仪与计算机的双向通讯,测量人员只需要将全站仪瞄准相应目标,点取相应的按钮即可。避免了数据
抄记、输入过程中的错误,简化了外业步骤,其数据处理快速准确、测量精度高、节省人工。 2. 能及时得出点位坐标和偏差信息,还可以结合放样点坐标进行反算,随时得出建议、纠正量,不受个人主观影响,便于操作指挥放样工作。 3.建立了控制点、放样点的数据库,能方便地进行点位坐标以及实测资料的查询、管理,其定方位角快捷。 4.仪器体积小重量轻,灵活方便,较少受到地形限制,且不易受处界因素的影响。 三、适用范围 1、全站仪极坐标放样施工,适用于各种土建、道桥施工放样,距离测量等;尤其是平面、立面复杂的施工测量,更能体现其优越性。 四、施工工艺 接合我公司在上海龙腾广场工程中运用全站仪极坐标放样施工的经验,我们对全站仪极坐标放样施工工艺作如下阐述: 1、工艺流程 利用AUTOCAD捕捉各控制点坐标→控制点位埋设→仪器安置与定向→控制点测定→坐标计算→测量成果提交→确定测量方法和线路→柱子、墙体、梁等轴线的定位放线→定位放线的质量控制
极坐标法测设数据计算
极坐标法测设数据计算 日期:2017年 9月2日 仪器编号: 观测者:赵文凯 边坐标增量水平距离坐标方位角水平夹角 AB28.63928.63931.045337°17′38″ AP-9.663-13.08516.26653°33′18″76°15′40″ AQ-27.249-3.34227.4516°59′32″29°41′54″ AS-12.317-21.31924.62159°58′59″81°41′21″ AR-27.891-17.26232.80134°45′13″57°27′35″ A、B为已知点, P、Q、S、R、为测设点 测 设 略 图
极坐标法测设数据计算 日期:2017年 9月1日 仪器编号: 观测者:徐顺捷 边坐标增量水平距离坐标方位角水平夹角AB21.47347.34251.98465°36′8″ AP-3.78821.41121.744280°1′93″214°26′25″AQ-1.65433.51133.552272°49′32″207°13′24″AS-22.97515.54423.739325°55′9″260°19′1″AR-12.01610.67616.074318°22′46″252°46′38″ A,B为已知点,P、Q、S、R为测设点 测 设 略 图
极坐标法测设数据计算 日期: 2017年9月 1日 仪器编号: 观测者:彭晟赟 计算 边坐标增量水平距离坐标方位角水平夹角AB9.978-15.36818.323122°59′40″ AP-8.321 6.20010.377323°18′36″200°18′40″AQ-10.24511.96515.740310°34′18″187°34′38″AS-6.5457.3119.812311°50′09″188°50′29″AR-7.89912.37414.680302°33′8″179°33′28″ A、B为已知点 P、Q、S、R为测设点 测 设 略 图 极坐标法测设数据计算 日期: 2017年9月 1日 仪器编号: 观测者:胡启成 计算
极坐标方程必背公式
极坐标方程必背公式 坐标系 1.极坐标系的概念 在平面上取一个定点O 叫做极点;自点O 引一条射线Ox 叫做极轴;再选定一个长度单位、角度单位(通常取弧度)及其正方向(通常取逆时针方向为正方向),这样就建立了一个极坐标系(如图). 设M 是平面上的任一点,极点O 与点M 的距离|OM |叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的∠xOM 叫做点M 的极角,记为θ.有序数对(ρ,θ)称为点M 的极坐标,记作M (ρ,θ). 2.直角坐标与极坐标的互化 把直角坐标系的原点作为极点,x 轴正半轴作为极轴,且在两坐标系中取相同的长度单位.如图,设M 是平面内的任意一点,它的直角坐标、极坐标分别为(x ,y )和(ρ,θ),则????? x =ρcos θ,y =ρsin θ或????? ρ2=x 2+y 2,tan θ=y x (x ≠0). 3.圆的极坐标方程 若圆心为M (ρ0,θ0),半径为r 的圆方程为ρ2-2ρ0ρcos(θ-θ0)+ρ20-r 2=0. 几个特殊位置的圆的极坐标方程 (1)当圆心位于极点,半径为r :ρ=r ; (2)当圆心位于M (a,0),半径为a :ρ=2a cos θ; (3)当圆心位于π(,)2 M a ,半径为a :ρ=2a sin θ. 4.直线的极坐标方程 若直线过点M (ρ0,θ0),且极轴到此直线的角为α,则它的方程为:ρsin(θ-α)=ρ0sin
(θ0-α). 几个特殊位置的直线的极坐标方程 (1)直线过极点:θ=θ0和θ=π-θ0; (2)直线过点M (a,0)且垂直于极轴:ρcos θ=a ; (3)直线过π(,)2 M b 且平行于极轴:ρsin θ=b . 方法总结:进行极坐标方程与直角坐标方程互化的关键是抓住互化公式:x =ρcos θ,y =ρsin θ,ρ2=x 2+y 2,tan θ=y x (x ≠0). 练习、在直角坐标系xOy 中,直线l 的参数方程为???-=+-=t y t x 32(t 为参数),以O 为极点, x 轴的非负半轴为极轴建立极坐标系,并在两种坐标系中取相同的长度单位,曲线C 的极坐标方程为0cos 2=+θρ. 把曲线C 的极坐标方程化为普通方程;
极坐标放样
第十二题:极坐标法放样点的平面位置 1.考核内容 (1)根据2个已知点的坐标及实地点位,测设出某给定坐标的点的平面位置。(2)用经纬仪和钢尺或全站仪,若使用全站仪则不需计算,考核时间要相应减半。 (3)完成该工作的计算和放样,并在实地标定所测设的点位。 (4)对中误差≤±3mm,水准管气泡偏差﹤1格。 2.考核要求 (1)操作仪器严格按观测程序作业;计算用“不能编程的科学计算器”进行计算; (2)记录、计算完整、清洁、字体工整,无错误; (3)实地标定的点位清晰。 3.考核标准 (1)以时间T为评分主要依据,如下图表,评分标准分四个等级制定,具体分 (2)根据对中误差情况,扣1~3分;根据标定的点位的清晰情况扣1~2分。(3)根据水准管气泡偏差情况,扣1~2分。 (4)根据卷面整洁情况,扣1~5分。(记录划去1处,扣1分,合计不超过5分。) 4.考核说明 (1)考核过程中任何人不得提示,各人应独立完成仪器操作、记录、计算及校核工作; (2)主考人有权随时检查是否符合操作规程及技术要求,但应相应折减所影响的时间; (3)若有作弊行为,一经发现一律按零分处理,不得参加补考; (4)考核前考生应准备好钢笔或圆珠笔、计算器,考核者应提前找好扶尺人;(5)考核时间自架立仪器开始,至递交记录表并拆卸仪器放进仪器箱为终止; 型或全站仪; (6)考核仪器经纬仪为DJ 2 (7)数据记录、计算及校核均填写在相应记录表中,记录表不可用橡皮檫修改,记录表以外的数据不作为考核结果; (8)主考人应在考核结束前检查并填写仪器对中误差及水准管气泡偏差情况,在考核结束后填写考核所用时间并签名。 (9)样题——考核时,现场任意标定两点为M、N,在M点设站后视N点,放样出一点A。已知M(14.265,87.375),N(20.659,76.329),A(29.476,85.208),试在M点设站后视N点,放样出A点。
点的平面位置的测设方法
点的平面位置的测设方法 点的平面位置的测设方法有直角坐标法、极坐标法、角度交会法和距离交会法。至于采用那种方法,应根据控制网的形式、地形情况、现场条件及精度要求等因素确定。 一、直角坐标法 直角坐标法是根据直角坐标原理,利用纵横坐标之差,测设点的平面位置。直角坐标法适用于施工控制网为建筑方格网或建筑基线的形式,且量距方便的建筑施工场地。 1.计算测设数据 如上图所示,Ⅰ、Ⅱ、Ⅲ、Ⅳ为建筑施工场地的建筑方格网点,a 、b 、c 、d 为欲测设建筑物的四个角点,根据设计图上各点坐标值,可求出建筑物的长度、宽度及测设数据。 m 00.50m 00.530m 00.580=-=-=a c y y 建筑物的长度 m 00.30m 00.620m 00.650=-=-=a c x x 建筑物的宽度 x :700.00m x :650.00m x :620.00m x :600.00m y :600.00m y :580.00m y :530.00m y :500.00m a b c d m n Ⅰ Ⅱ Ⅲ Ⅳ 图1 直角坐标法
测设a点的测设数据(Ⅰ点与a点的纵横坐标之差): - 620= . - ?I x x a x 00 = = 20 . m m m 00 00 . 600 = - 530= - ?I y . y a y = 00 . 00 m 30 m m 00 500 . 2.点位测设方法 (1)在Ⅰ点安置经纬仪,瞄准Ⅳ点,沿视线方向测设距离30.00m,定出m点,继续向前测设50.00m,定出n点。 (2)在m点安置经纬仪,瞄准Ⅳ点,按逆时针方向测设90?角,由m点沿视线方向测设距离20.00m,定出a点,作出标志,再向前测设30.00m,定出b点,作出标志。 (3)在n点安置经纬仪,瞄准Ⅰ点,按顺时针方向测设90?角,由n点沿视线方向测设距离20.00m,定出d点,作出标志,再向前测设30.00m,定出c点,作出标志。 (4)检查建筑物四角是否等于90?,各边长是否等于设计长度,其误差均应在限差以内。 测设上述距离和角度时,可根据精度要求分别采用一般方法或精密方法。 二、极坐标法 极坐标法是根据一个水平角和一段水平距离,测设点的平面位置。极坐标法适用于量距方便,且待测设点距控制点较近的建筑施工场地。
常见曲线的极坐标方程1
常见曲线的极坐标方程(1) 学习目标: 1、能在极坐标系中给出简单图形(过极点的直线)的方程; 2、通过比较这些图形在极坐标系和平面直角坐标系中的方程,体会在用方程刻画平面图形 时选择适当坐标系的意义; 3、理解极坐标系中直线的方程。 活动过程: 活动一:知识回顾 1、曲线的极坐标方程的意义。 2、(1)直线x y 1的极坐标方程是__________________________________ ; (2)曲线COS 1的直角坐标方程是____________________________ 。 活动二:直线的极坐标方程 探究:若直线l经过M (0,0),且直线I的倾斜角为,求直线I的极坐标方程。 (这里,直线I的倾斜角是指极轴与直线I向上的方向所成的角。) 小结:一些特殊位置的直线的极坐标方程: (1)当直线I过极点时,直线I的极坐标方程是:______________________________ ; (2) 当直线I过点M(a,0)且垂直于极轴时,直线I的极坐标方程是: _________________ (3)当直线I过点M(b,7)且平行于极轴时,直线I的极坐标方程是: _______________
活动三:直线的极坐标方程的求解 例1按下列条件写出直线的极坐标方程: (1)经过极点和点A(6,g)的直线;(2)经过点B(5,),且垂直于极轴的直线; (3)经过点C(8,6),且平行于极轴的直线; (4)经过点D(2.. 3,0),且倾斜角为务的直线。 例2:分析极坐标方程cos 6,sin 6的特点,说明他们分别表示什么曲线? 例3:求曲线cos 1 0关于直线7对称的曲线方程。
直角坐标与极坐标的区别
直角坐标与极坐标的区别 在平面内取一个定点O,叫极点,引一条射线Ox,叫做极轴,再选定一个长度单位和角度的正方向(通常取逆时针方向)。对于平面内任何一点M,用ρ表示线段OM的长度,θ表示从Ox到OM的角度,ρ叫做点M的极径,θ叫做点M 的极角,有序数对(ρ,θ)就叫点M的极坐标,这样建立的坐标系叫做极坐标系。第一个用极坐标来确定平面上点的位置的是牛顿。他的《流数法与无穷级数》,大约于1671年写成,出版于1736年。此书包括解析几何的许多应用,例如按方程描出曲线。书中创建之一,是引进新的坐标系。17甚至18世纪的人,一般只用一根坐标轴(x轴),其y值是沿着与x轴成直角或斜角的方向画出的。牛顿所引进的坐标之一,是用一个固定点和通过此点的一条直线作标准,例如我们现在的极坐标系。牛顿还引进了双极坐标,其中每点的位置决定于它到两个固定点的距离。由于牛顿的这个工作直到1736年才为人们所发现,而瑞士数学家J. 贝努力利于1691年在《教师学报》上发表了一篇基本上是关于极坐标的文章,所以通常认为J.贝努利是极坐标的发现者。J.贝努利的学生J.赫尔曼在1729年不仅正式宣布了极坐标的普遍可用,而且自由地应用极坐标去研究曲线。他还给出了从直角坐标到极坐标的变换公式。确切地讲,J.赫尔曼把,cos ,sin 当作变量来使用,而且用z,n和m来表示,cos 和sin。欧拉扩充了极坐标的使用范围,而且明确地使用三角函数的记号;欧拉那个时候的极坐标系实际上就是现代的极坐标系。有些几何轨迹问题如果用极坐标法处理,它的方程比用直角坐标法来得简单,描图也较方便。1694年,J.贝努利利用极坐标引进了双纽线,这曲线在18世纪起了相当大的作用。 极坐标系 在极坐标中,x被ρcosθ代替,y被ρsinθ代替。ρ=(x^2+y^2)^0.5 极坐标系是一个二维坐标系统。该坐标系统中的点由一个夹角和一段相对中心点——极点(相当于我们较为熟知的直角坐标系中的原点)的距离来表示。极坐标系的应用领域十分广泛,包括数学、物理、工程、航海以及机器人领域。在两点间的关系用夹角和距离很容易表示时,极坐标系便显得尤为有用;而在平面直角坐标系中,这样的关系就只能使用三角函数来表示。对于很多类型的曲线,极坐标方程是最简单的表达形式,甚至对于某些曲线来说,只有极坐标方程能够表示。[编辑本段]历史 主条目:三角函数的历史 众所周知,希腊人最早使用了角度和弧度的概念。天文学家喜帕恰斯(Hipparchus 190-120 BC)制成了一张求各角所对弦的弦长函数的表格。并且,曾有人引用了他的极坐标系来确定恒星位置。在螺线方面,阿基米德描述了他的著名的螺线,一个半径随角度变化的方程。希腊人作出了贡献,尽管最终并没有建立整个坐标系统。关于是谁首次将极坐标系应用为一个正式的坐标系统,流传着有多种观点。关于这一问题的较详尽历史,哈佛大学教授朱利安·卢瓦尔·科利奇的《极坐标系起源》[1][2]作了阐述。格雷瓜·德·圣-万桑特和博纳文图拉·卡瓦列里,被认为在几乎同时、并独立地各自引入了极坐标系这一概念。圣-万桑特在1625年的私人文稿中进行了论述并发表于1647年,而卡瓦列里在1635进行了发表,而后又于1653年进行了更正。卡瓦列里首次利用极坐标系来解决一个关于阿基米德螺线内的面积问题。布莱士·帕斯卡随后使用极坐标系来计算抛物线的长度。在1671年写成,1736年出版的《流数术和无穷级数》(en:Method of Fluxions)一书中,艾萨克·牛顿第一个将极坐标系应用于表示平面
任务7-3极坐标法测设圆曲线学习指导
任务7.3 :极坐标法测设圆曲线学习指南概述
任务书 极坐标法测设圆曲线工作任务书
7.线路直线、曲线转角表 直戋.曲找及給向角 6人一组,每组在线路中线测量模拟实训场完成 JD2上一个完整的圆曲线测设 任务要求 任务 全站仪测设线路中线技术要求 线路中线技术要求 基本工作①根据点之记统计控制桩完整性 技术要求
三、学习内容 1.圆曲线逐桩坐标计算 在城市道路、高速公路中常设有圆曲线,也就是在两条直线之间加一段圆弧,以便改变方向。圆曲线 线形是由直线T 圆曲线T 直线组成,分为右偏曲线和左偏曲线(图 6-5-1和图6-5-2 )。圆曲线测量就是将线 路中线圆曲线段每隔一定的间隔用木桩在地面上表示出来。 1.1圆曲线要素计算 圆曲线的要素包括切线长(T ),曲线长(L ),外矢距(E o )和切曲差(q )。 (1) 切线长:ZY (或YZ )至JD 间的直线长; (2) 曲线长:ZY 至YZ 间的曲线长; (3) 外矢距:JD 沿半径方向至QZ 间的直线长; (4) 切曲差:二倍切线长与曲线长之差。 从图6-5-1的几何关系,当圆曲线半径 R 、转向角a 已知时,可得综合要素 T 、L 、E o 、q 等的计算公 式: 图6-5-1右偏圆曲线设置示意图 图6-5-2左偏圆曲线设置示意图
十…a T = R tan — 2 兀 180 a E0 = Rsec—— R 2 q =2T -L (6-5-1) 上述式中: a----线路转向角,即相邻两直线延长线的夹角; R-----圆曲线半径; 1.2圆曲线主点里程推算 (1)圆曲线主点 ZY ――直圆点 QZ ――曲中点 YZ ――圆直点 (2)主点里程推算 'ZY点里程里程-T ?QZ点里程=ZY点里程+% YZ点里程=ZY点里程+ L 主点里程检核计算: YZ点里程二ZY点里程? 2T -q 1.3圆曲线逐桩坐标计算 (1).曲线起点ZY点线路坐标计算 :X ZY =X JD +T COS2ZY切+180) ,ZY =Y JD +Tsi n(a ZY切+180 3 式中:(X JD,Y JD)------JD的线路坐标; (X ZY,Y ZY)-----ZY 的线路坐标; ZY切------ZY至JD点的坐标方位 (6-5-2) (6-5-3) (6-5-4)