嵌入式智能车载多媒体终端控制系统的设计与实现
道路运输车辆卫星定位系统车载终端技术要求..
道路运输车辆卫星定位系统 车载终端技术要求 1 范围 本标准规定了道路运输卫星定位系统车载终端(以下简称终端)的一般要求、功能要求、性能要求以及安装要求。 本标准适用于道路运输卫星定位系统中安装在车辆上的终端设备。 2 规范性引用文件 下列文件对于本标准的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB/T 19056 汽车行驶记录仪 GB/T 19951 道路车辆静电放电产生的电骚扰试验方法 JT/T 766-2009 北斗卫星导航系统船舶监测终端技术要求 QC/T 413 汽车电器设备基本技术条件 QC/T 417.1 车用电线束插接器第1部分:定义,试验方法和一般性能要求 QC/T 420 汽车用熔断器 QG/T 730 汽车用薄壁绝缘低压电线 YD/T 1050 800MHz CDMA数字蜂窝移动通信网设备总测试规范:移动台部分 YD/T 1214 900/1800 MHz TDMA数字蜂窝移动通信网通用分组无线业务(GPRS}设备技术要求:移动台 YD/T 1367 2GHz TD-SCDMA 数字蜂窝移动通信网终端设备技术要求YD/T 1547 2GHz WCDMA 数字蜂窝移动通信网终端设备技术要求(第三阶段) YD/T 1558 2GHz CDMA2D0数字蜂窝移动通信网设备技术要求:移动台 3 术语、定义和缩略语 3.1 术语和定义 下列术语和定义适用于本文件。 3.1.1 固件 firmware 运行在终端微处理器中的嵌人式软件。 3.1.2 电子运单 electronic travel permit
车载GPS终端安装步骤及注意事项(精)
星软车载GPS终端安装步骤及注意事项: 一、终端主电源的查找与接法 1、六芯电源线、红(火线黑(零线蓝(ACC发动机开关检测白(断油电绿、 灰紧急报警按钮正负极。 2、四芯功能、红色火线、黑色负极、紫色装卸料监测、黄色超速车内报警信号。 3、主电源的查找与接线、首先将小夹子夹在汽车铁架子上,汽车搭铁点或者直接夹在 汽车电源负极上,保证接触良好(车辆启动钥匙拔出,找出车辆较粗的主电源线,然后将测试笔的金属尖端插入与测试线相接触,如果测试笔的灯亮电压稳定车辆无异常,表明该测试线有电,可作为终端主电源接红色线,全车身是电瓶负极(零线接黑色线(最好查找到负极根部作为负极连接点,蓝色为发动机开关检测ACC,其它功能线截短用绝源胶带包扎好备用。 4、ACC查找、首先将小夹子夹在汽车铁架子上,然后将测试笔的金属尖端与测试线相 接触,车钥匙向前扭一档如果测试笔的灯亮钥匙复位测试笔的灯亮即灭,则是ACC 接蓝色线。 二、终端设备位置和固定 1、终端固定、小型轿车通常可以安装在车辆左边(正驾驶驾驶台下方;仪表盘内侧; 驾驶台中间(收音机内侧;车辆右边(副驾驶;正、副驾驶座位下(车况较差的车不建议安装易进水导致GPS终端短路烧毁,严重导致车辆自燃;后排座位下;后备箱左
右夹层内。终端设备要求放置在隐蔽、防雨淋、防高温、不容易维修拆卸车辆固件上、并用魔术胶贴尼龙扎带双保险固定。 2、GPS/GSM天线、应尽量放置在上方无铁部件遮挡、天线正面朝上、用自带胶或魔术 胶、尼龙扎带固定,走线应避免和其它线路互相缠绕,应单独走线和扎线以免产生干扰,并用塑带或尼龙扎带固定引到主机位置。贴有防爆膜的车辆,GPS/GSM天线要引出车外,一般引出置车头处或档风玻璃雨刷饰板内。 3、LCD显示屏、安装LCD屏应放置在前挡风玻璃左角右角,尽量靠近边缘不影响驾驶 视线,大型货车可放置驾驶台中间,应单独走线和扎线以免产生干扰。 4、安装麦克风、把麦克风装置于左A柱上方近遮阳板处(尽量靠近驾驶员,以免在对 讲时产生回音和空间距离感,走线应避免和其它线路互相缠绕,引线不能与其它线路互相缠绕,应单独走线和扎线以免产生干扰,由于麦克风引线细小,注意在安装时要避免引线损坏。 5、外置语音喇叭、根据客户要求可安装在驾驶台LCD屏底座用魔术胶黏贴、方向盘下 方车架上用魔术胶尼龙扎带固定。 6、安装紧急按扭、要求紧急按扭的安装位置,则根据隐蔽的原则或车主要求选定位置, 方便紧急按、触,按压式需在选定位置处打孔安装。
智能车载信息系统设计
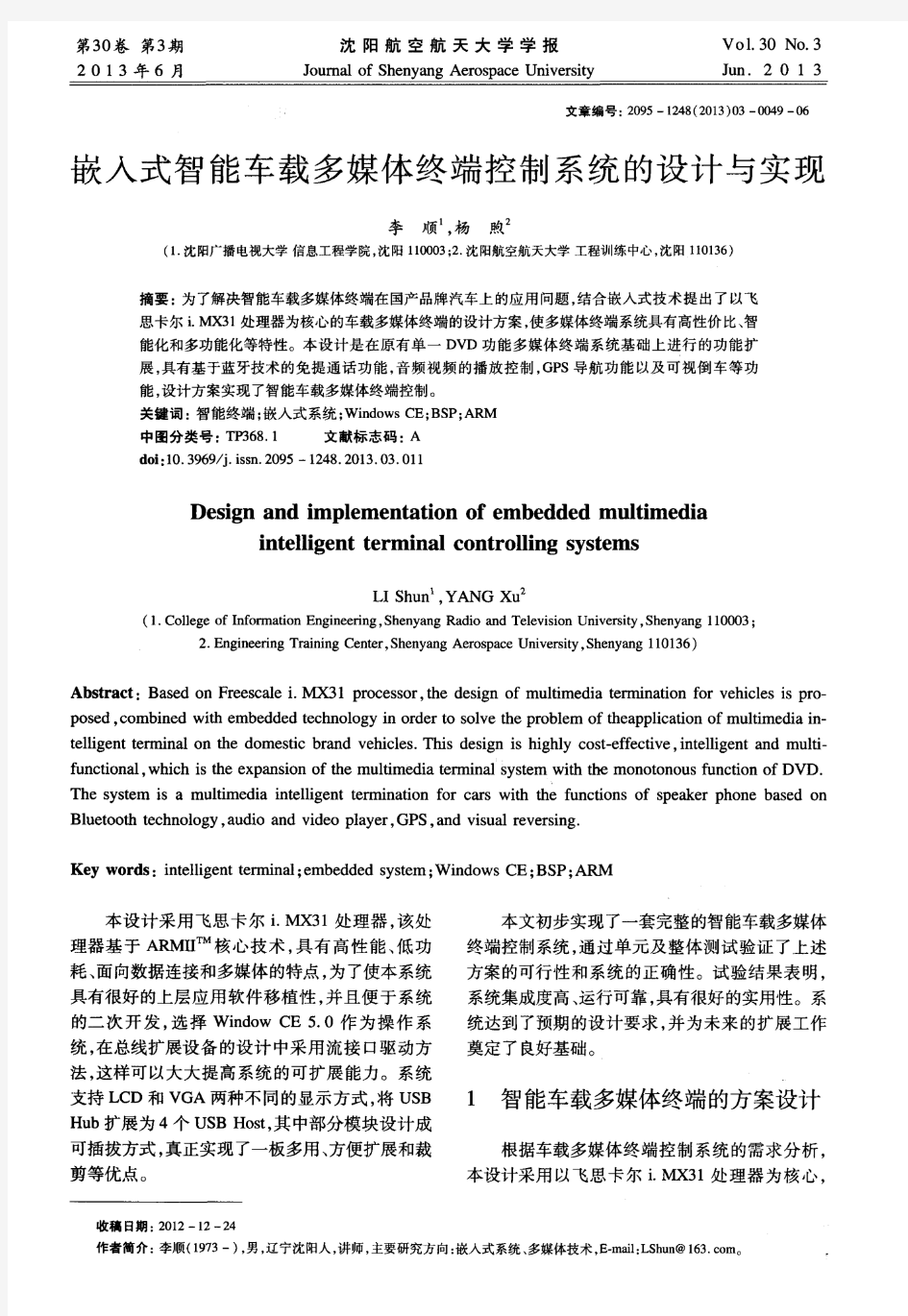
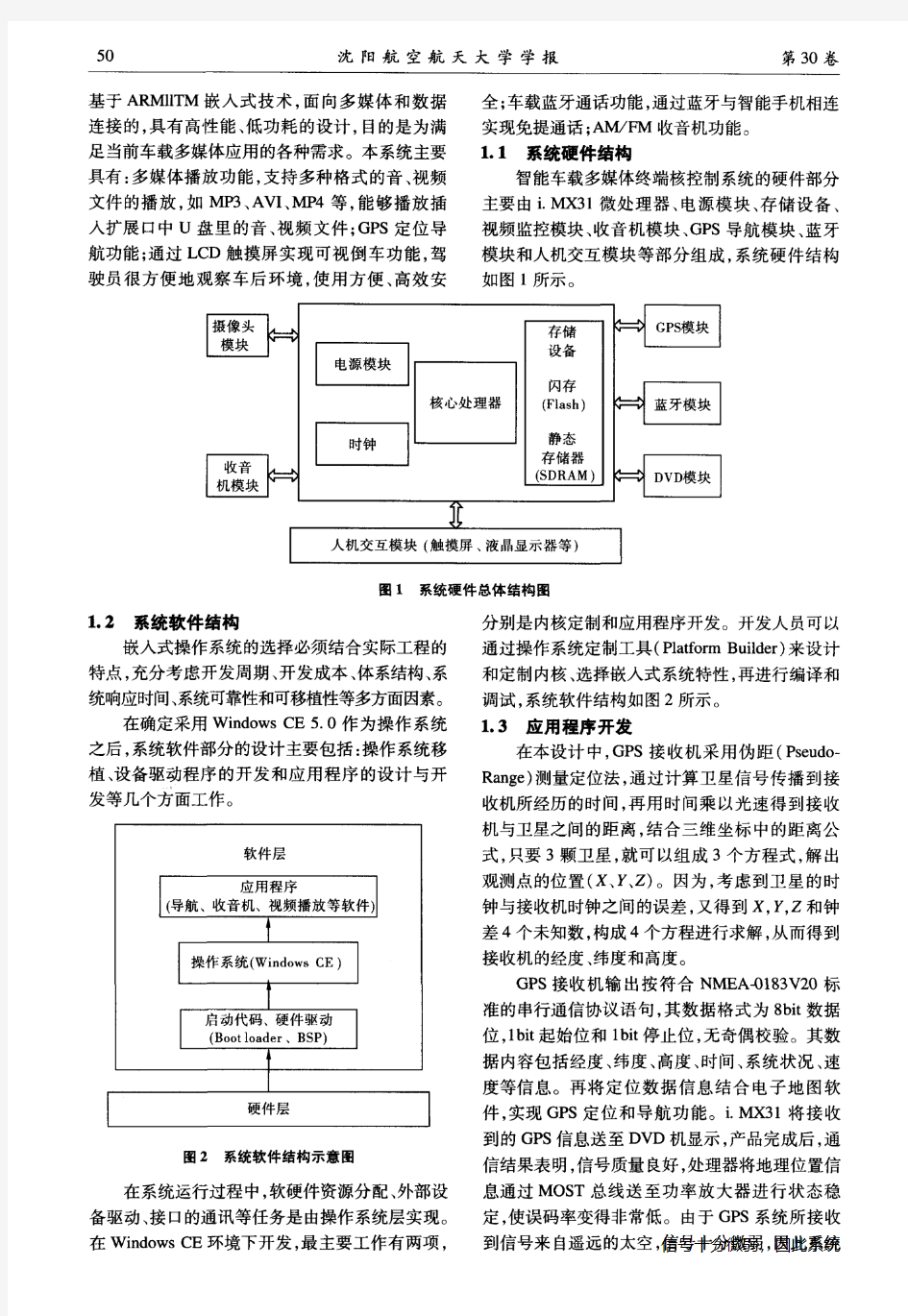
智能车载信息系统设计 根据美国交通部的一项研究,全世界人们每周在汽车上度过的交通时间超 过5亿小时。既然花在汽车上的时间如此之多,人们希望能够利用这些时间来 享受娱乐,同心爱的人说说话,甚至完成一些通常需要在工作场所才能完成的 任务。 ?在汽车中保持联系是人们最想实现的,这只要看一看手机的使用就可以知 道。另外,路上遭遇严重的交通堵塞,走错了路,或者遇到像汽油用完了之类 的常事,都可能影响您准时到达目的地。 如何才能让驾驶者在安全驾驶的同时保持联系,并按时到达目的地呢? 巧妙的方法是通过语音命令结合互联网连接进行通信和控制。Microsoft Telematics Platform(微软车载信息处理平台)提供了这一功能,它是一种用于 集成各种移动设备和通过互联网与无线网络传送信息的集线器。 微软车 载信息处理平台提供以下功能: ?高级的优质语音识别与合成技术 ?点播Web服务,如避免交通堵塞,访问最新头条新闻,或通过“MSN汽车” 频道(目前仅适用于美国)查找距离最近价格最低的加油站 ?个性化导航: 借助GPS寻找感兴趣的地点或指引方向 ?PDA/手机集成蓝牙技术, 将手机和PDA无线连接到汽车的电子系统,让驾驶者能够通过汽车的音响系 统使用语音来拨打和接听电话、获得会议提醒和访问重要数据。 ?通过远程诊断检查车辆的“健康”状况,包括故障与维护报警,从而有 可能提高微软公司的汽车业务部与赛灵思共同创建了能够以低成本点提供这 些优点的参考平台,从而促进了面向全世界驾驶者的更简单、更可靠且消费得 起的解决方案的开发。 ?灵活和可伸缩的平台 传统的汽车电子设计方法一直是根据汽车制造
JTT794-2011道路运输车辆卫星定位系统车载终端技术的要求
ICS 03.220.20;33.040.40 M32 中华人民共和国交通运输行业标准 JT/T 794—2011 道路运输车辆卫星定位系统车载终端技术要求GNSS system for operating vehicles —Technical specifications for vehicle terminals 2011-02-28 发布2011-05-08 实施 中华人民共和国交通运输部发布 JT/T 794—2011 目次 前言 ......................................................................................................................................... II 1 范围 ..............................................................................................................................................1 2 规范性引用文件 ..........................................................................................................................1 3 术语、定义和缩略语. (1) 4 一般要求 ......................................................................................................................................2 5 功能要求 ......................................................................................................................................3 6 性能要求 ......................................................................................................................................8 7 安装要求 ....................................................................................................................................11 附录A (12) 前言 本标准按GB/T 1.1—2009 给出的规则起草。本标准由全国道路运输标准化委员会(筹)提出并归口。本标准起草单位:交通运输部公路科学研究院、福建省交通运输厅、
北斗车载终端技术说明书
通讯模块: 通讯模块采用HUAWEI EM660 通讯方式:TCP/IP、UDP/IP ; 工作电压:3.9V; 工作电流:最大峰值280MA; 工作频段:900MHZ、1800MHZ、GPRS Class 8; 工作环境:-20℃~ +70℃; 定位模块: 定位模块采用:UBLOX- 5S; 输出格式:0183(GPRMC、GPGGA、GPVGT); 波特率:9600; 工作电压:3V; 工作电流:<30mA; GPS通道:16通道; 启动参数:热启动:<5秒;温启动:<38秒;冷启动:<45S; 刷新率:1次/秒; 定度精度:<15米; 整机参数: 型号:BE-910C 品牌:贝尔科技 体积:长120mm 宽155mm 高45mm;颜色:棕红色; 重量:1.2KG; 工作电压:宽电压DC 9V~34V 工作环境:-20℃~ +70℃ 过压保护门阀:32V~100V 通讯方式:SMS、UDP、TCP 操作系统:嵌入式RTOS操作系统; 视频压缩标准:H.264 预览分辨率:PAL:704×576(4CIF);NTSC:704×480(4CIF) 回放分辨率:4CIF/DCIF/2CIF/CIF/QCIF 视频输入:1/4路(PAL/NTSC自动识别;电平:1.0Vp-p,阻抗:75Ω),视频输出:1路(PAL/NTSC可选;电平:1.0Vp-p,阻抗:75Ω) 视频帧率:PAL:1/16 ~ 25帧/秒;NTSC:1/16 ~ 30帧/秒 视频压缩码率:32K ~ 2M可调,也可自定义,上限8M(单位:bps) 音频压缩标准:OggVorbis 音频输入:1/2路(电平:2.0~2.4Vp-p,阻抗:1000Ω) 音频输出:1路(电平:2.0~2.4Vp-p,阻抗:600Ω) 码流类型:可选择单一视频流或复合流 报警输入:7路电平信号输入,1路脉冲信号输入 报警输出:2路开关量或干节点号输出 无线网络传输:模块内置,SMA天线接口 GPS定位:内置高灵敏度GPS模块,SMA天线接口 数据存储:SD卡存储,支持最大容量16GB 数据备份:SD卡备份、USB备份
车载导航状态的监控方法及终端与设计方案
本技术实施例提供一种车载导航状态的监控方法及终端,其中方法包括:判断终端是否处于非休眠状态;若处于非休眠状态,则监测第一预设时间内终端平面与水平面的夹角的变化值是否小于第一预设阈值;若小于第一预设阈值,则监测第二预设时间内终端的加速度是否在不断的变化且加速度大小是否大于第二预设阈值;若加速度在不断的变化且加速度大小大于第二预设阈值,则判断第二预设时间内终端的加速度方向的变化值是否小于第三预设阈值;若小于第三预设阈值,则确定终端处于车载导航状态。本技术实施例可以不依靠导航地图,准确的判断出终端是否处于车载导航状态,并且可以为终端上的其他应用提供场景依据,更好的为终端用户服务,提高了用户体验。 权利要求书 1.一种车载导航状态的监控方法,其特征在于,包括: 判断终端是否处于非休眠状态;
若处于非休眠状态,则监测第一预设时间内终端平面与水平面的夹角的变化值是否小于第一预设阈值; 若小于第一预设阈值,则监测第二预设时间内终端的加速度是否在不断的变化且加速度大小是否大于第二预设阈值; 若加速度在不断的变化且加速度大小大于第二预设阈值,则判断所述第二预设时间内终端的加速度方向的变化值是否小于第三预设阈值; 若小于第三预设阈值,则确定所述终端处于车载导航状态。 2.如权利要求1所述的车载导航状态的监控方法,其特征在于,所述若小于第三预设阈值之后还包括: 监测终端上的导航软件是否打开; 若终端上的导航软件打开,则确定所述终端处于车载导航状态; 或者,监测终端是否接收到卫星位置数据; 若终端接收到卫星位置数据,则确定所述终端处于车载导航状态。 3.如权利要求1或2所述的车载导航状态的监控方法,其特征在于,所述确定所述终端处于车载导航状态之后还包括: 统计车载导航时间,判断所述车载导航时间是否超过预设时间阈值; 若超过预设时间阈值,则提醒用户处于疲劳驾驶状态。 4.如权利要求3所述的车载导航状态的监控方法,其特征在于,所述若超过预设时间阈值,则提醒用户处于疲劳驾驶状态之后还包括:
GPS车载终端安装技术规范
GPS车载终端安装技术规范 由于车载卫星定位系统属高精密设备产品,必须要有一个良好稳定的工作环境,才能充分发挥其优良的工作性能,所以在安装过程中对其安装的方法和安装位置的确定至关重要。对于各种车型的不同,其安装位置和方法也不尽相同,要安装好一套车载定位设备,既要对设备配置熟悉又要对车辆情况有一定的了解。 首先要了解车载卫星定位系统总体结构和原理,系统主要是利用3星定位原理通过主机接收并处理GPS定位信息,由GPRS数字移动通信系统将GPS定位信息送到调度中心实施监控。车载式卫星定位系统的主要构成部分:车载终端(车台)、LCD显示屏、通话手柄、GPS天线、GSM天线、报警控制器以及其它选配附件和连线等;其次是要了解车辆车型及车辆结构,目前国内路面上行使机动车辆种类大致可分为轿车、面包车、中小型货车及大型半挂牵引集装厢车等车型。 车载设备主要技术参数: ◆工作电压:直流12V或24V ◆工作电流:200mA(待机状态) ◆频率范围:GPS 15750.42 MHz ◆通信速率:9600bps ◆定位精度:25m (无SA、无差分2σ) ◆速度精度:≤0.2m/s ◆动态特性:不小于4g ◆通讯范围:短消息已开通的GSM全网
下面详细介绍A VLS-80型车载卫星定位终端在各种车型中安装方法和安装位置。 *安装时所需工具: 小型电钻一把;十字、一字改锥各一把;万用表(或汽车试电笔0~24V)一个(支);尖嘴钳、老虎钳、剥线钳或剪刀一把;Φ10圆锉一把;记号笔一支; *安装时所需耗材: Φ3、Φ5钻头若干;绝缘胶布、双面贴、扎线带、螺丝(Φ4×15㎜自攻、Φ4×10㎜自攻、Φ5×15㎜带螺母平头、Φ5×10㎜带螺母平头螺丝及配套垫片)若干; 一.轿车系列: 车台: 由于车台抗干扰性较弱,易受外界各种信号的干扰,从而影响车台的工作稳定性,而轿车均为发动机前置结构,在行驶过程中,其缸体上的火花塞会不断产生各种不同频段的电磁波,特别是高压点火线圈也位于发动机室内,且离驾驶室很近,它也会在工作时不断产生杂乱的高频电磁波,而且干扰强度有甚于火花塞的干扰。另外,霍尔传感器、分电器、信号放大器、仪表盘内的转速表等车辆配置均是依靠高压脉冲感应原理来工作的,也会产生不同程度的干扰信号。如果将车台安装在车辆前部将严重遭受这些电磁波的干扰而影响车台正常工
北斗车载导航终端市场分析报告
北斗车载导航终端市场分析报告 中宇华星航空技术有限公司 2013年1月8日 目录 1北斗导航系统应用行业发展分析 (2)
1.1北斗导航系统全球地位 (2) 1.1.1美国GPS系统(产业链成熟,应用广泛) (2) 1.1.2欧洲GALILEO 系统(定位精度高、还未组网完成) (3) 1.1.3俄罗斯GLONASS 系统 (5) 1.1.4中国北斗系统 (5) 1.2北斗系统发展规划 (7) 1.3北斗系统优势 (7) 2北斗导航系统市场环境分析 (8) 2.1国内北斗导航经济环境分析 (8) 2.2国内北斗导航政策环境分析 (9) 2.2.1相关标准 (9) 2.2.2相关政策 (10) 2.2.3标准及相关分析 (10) 3国内导航产业现状分析 (11) 3.1.1北斗导航产业链 (11) 3.1.2北斗导航竞争态势 (12) 4国内车载导航市场现状分析 (13) 4.1GPS车载终端分析 (13) 4.1.1车载GPS定位监控应用 (13) 4.1.2车载GPS导航应用 (16) 4.2北斗车载终端分析 (17) 4.2.1 一体式终端 (17) 4.2.2 分体式终端 (19) 5公司车载终端发展方向 (20) 5.1 定位监控方向: (20) 5.2 纯导航方向 (20) 1北斗导航系统应用行业发展分析 1.1北斗导航系统全球地位 1.1.1美国GPS系统(产业链成熟,应用广泛) GPS是英文Global Positioning System(全球定位系统)的简
称,是世界上现唯一一个可以为全球用户提供有效、持续定位导航的全球卫星导航系统。GPS起始于1958年美国军方的一个工程,1964年投入使用。20世纪70年代,美国陆海空三军联合研制了新一代卫星定位系统GPS 。主要目的是为陆海空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,经过20余年的研究实验,耗资300亿美元,到1994年,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 由于GPS技术所具有的全天候、高精度和自动测量的特点,作为先进的测量手段和新的生产力,已经融入了国民经济建设、国防建设和社会发展的各个应用领域。 随着冷战结束和全球经济的蓬勃发展,美国政府宣布,在保证美国国家安全不受威胁的前提下,取消SA政策,GPS民用信号精度在全球范围内得到改善,利用C/A码进行单点定位的精度由100M提高到10M,这将进一步推动GPS技术的应用,提高生产力、作业效率、科学水平以及人们的生活质量,刺激GPS市场的增长。 1.1.2欧洲GALILEO 系统(定位精度高、还未组网完 成) Galileo卫星导航计划是由欧共体发起,并与欧洲空间局一起合作开发的卫星导航系统计划。该计划将有助于新兴全球导航定位服务在交通、电信、农业或渔业等领域的发展。 2003年5月26日,Galileo卫星导航计划。Galileo卫星导航
车载系统发展现状分析
1 定义 1.1智能汽车 从结构上定义:搭载通用操作系统,具备完整计算功能,拥有无线网络连接,配置多种外设接口,自身操作组件与汽车部件相融合;集环境感知、规划决策与多等级辅助驾驶于一体的综合性系统 1.2 智能交通 智能交通,通常用“车联网”概念来代替,即对每一辆汽车进行交通全程控制,对每一条道路进行交通全时空控制,以提供交通效率和交通安全。 一般分为三层: 第一感知层,通过传感技术构成感知系统,感知网内的单个汽车载体;第二是互联互通层,即车与车、车与路之间的互相联系、通讯;最后是管理层,通过云计算等智能平台,实现车辆调度和管理。 2 关键技术 2.1 智能汽车的关键技术 按照智能汽车系统中车载信息设备从底层到应用层的层级顺序,关键技术可以分为:2.1.1 芯片级的处理器 适用于移动平台的低功耗处理器分为两类:一种是Intel的Atom平台,一种是ARM平台。目前市售的主流智能手机都基于ARM的Cortex-A8核心。Intel是最先明确表达向车载系统进军的移动芯片厂商,基于CISC的Atom是X86平台上唯一和和RISC架构的RAM 处理器对抗的产品。Intel将Atom划分出很多种类的做法,分别面向嵌入式系统、简易PC 系统以及车载系统等等。 2.1.2 移动操作系统 与智能手机类似,智能汽车的操作系统也集中在Android与IOS两大类。 2.1.3 应用层开发 作为一般开发者,应用层是产品研发与立足的关键,如何设计出友好性、功能性与可靠新兼备的应用软件,直接决定用户体验的好坏,并影响消费者的接受程度。 1)面向汽车的软件开发
反之,又不能体现智能化的特点。 2)面向用户的软件开发 对比面向汽车的软件开发,用户层更倾向于友好性与简便性,实现汽车与软件的无缝结合,既能简化驾驶又不能使驾驶员分心。汽车上的电话、短讯、音乐、卫星导航等其他功能都在这一层实现。 2.1.4 后台数据处理 基于用户数据的后台精细化分析,实现驾驶习惯、消费习惯统计,以及车辆管理。2.2 智能交通的关键技术 智能交通的实现涵盖了车载终端设备、公共交通信息采集监测与服务、运营监管和应急保障等与“物联网”息息相关的关键应用。 2.2.1 车辆-车辆通信(V2V) 利用车载系统之间的通讯实现车辆“对话”,与智能手机的group功能类似,相同操作系统下可以实现资源共享与彼此识别。简单的应用, 并能基于驾驶员事先设定的GPS导航的路线来改变行驶路径。 使用车载传感器使汽车拥有360 分享,相当于减少了单台车辆视野上的盲区。 V2V系统的广泛应用必然要基于不同厂家、不同系统间的互操作性。 2.2.2 车辆-手机通信 智能汽车作为更大的移动终端,与智能手机的互联是趋势、也是关键,可以避免车载功能的重复性,降低成本,并利用稳定的移动通讯网络实现功能的扩展 2.2.3 车辆-智能平台通信 智能平台应该是高速运算的平台,比如云处理器,利用智能平台实现各个车载信息设备的资源整合与统筹管理,从目前通用的CDMA、WCDMA网络、到4G和wifi 信息的无障碍上传与下达成为可能。 3 趋势与现状 3.1 政策层面 从2010年开始,车联网市场正在以每年20%~60%的速度增长,而这一增长态势将至少
4G车载视频终端技术方案
4G视频车载北斗卫星定位终端技术方案项目硬件需求:
二、功能描述 1、定位功能 2、自检功能 3、通信功能 4、信息采集:a、驾驶员身份 b、车辆载货状态 c、图像信息 d、音频信息 e、视频信息、 5、行驶记录 6、监听 7、通话 8、休眠 9、报警提示10、语音播报 三、车载设备设计要求 所有车载设备要求:≥IP55防水防尘等级;使用温度要求-20摄氏度~85摄氏度;相对湿度20%~90%RH;平均无故障时间MTBF≥10000小时。 设备采用外装的密封铁盒设计,符合IP55防水防尘等级要求。 所有回传信息,包括照片信息和RFID的信息,都需要加密;同时支持不 加密传输。是否加密可通过远程设置。 前摄像头、车内摄像头、麦克风集成一起,采用防拆卸外壳;安装后不 可无损拆卸。 音视频录制功能 车载设备内置存储功能,可存储≥每路300小时,共三路,合计≥900小 时的音视频录像文件;每路录像码率≥256Kbps;质量要求如下 3.1.1 前置摄像头录像要求可辨识不小于15米内的人员面部 3.1.2 车内摄像头录像要求可辨识驾驶员和副驾驶人员面部 3.1.3 车尾摄像头可辨识不小于15米内的人员面部 4.2 音视频数据回传功能 车载设备内置数据回传功能,通过4G/3G/GPRS网络可以回传音视频或 图像数据,要求兼容电信、联通和移动网络,更换运营商不需要更换设 备。分为两种模式 4.2.1 被动回传 由控制中心控制,要求回传时,回传要求回传的音视频数据。
4.2.2 主动回传 当终端设备判断发生盗抢或报警时,在电源未切断时,主动回传车内音 视频。 电源切断后要求按照指定时间间隔回传图片(可以认为切断电源后,需 要及时上传一张车内照片即可),回传间隔按秒为单位从远程设置。可 远程设置回传时间。远程可要求终端设备回传音频或图像。 4.3 车内监视控制系统 通过车内显示屏可以监控任意车载摄像头,支持多画面监控及指定摄像 头单画面监控。可外接控制器,以控制车顶云台摄像机。 监控系统可以通过时间检索浏览本机纪录视频,选择日期,小时,分钟 的方式观看,支持播放、暂停、停止、快进和快退的功能。 可以根据要求通过USB(≥USB2.0)导出加密音视频数据。 控制系统要求使用简单方便。 4.4 RFID功能 要求设备安装RFID读卡器,通过无线网络上报读卡信息。RFID读卡器 工作距离为1m,工作时间为汽车点火后按设置读卡次数和间隔读卡,之 后关闭。时间可以从远程设置。 4.5 防盗抢功能 根据各种条件判断是否发生盗抢、或通过报警按钮触发报警,一旦判断 发生盗抢,则自动报警,并按照设置时间回传车内图像。设备在主电源 被切断后,至少工作6个小时,定位系统正常工作,图片回传要求按照 指定时间间隔回传,回传间隔按秒为单位从远程设置。 4.6 参数设置 4.6.1 设备需要提供参数设置模块,此模块需要分级控制,日常设置可以直接 设置,关键参数设置需要密码控制。 4.6.2 车载端视频回传要求兼容4G网络和3G网络;车载端图片回传要求兼容 4G/3G/GPRS网络;车载端定位信息回传要求兼容GPRS网络。图片回 传要求按照指定时间间隔回传,回传间隔按秒为单位从远程设置;在 4G/3G网络连通的情况下,可以回传CIF和HD1格式视频数据。要求在 4G网络条件下,最高可回传1080P格式视频。回传延时<=2s。
北斗卫星定位车载终端技术方案精编版
北斗卫星定位车载终端技术方案 三、技术原理 北斗卫星导航系统是中国自行研制开发的区域性有源三维卫星定位与通信系统(CNSS),是除美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统。北斗卫星导航系统为用户提供高质量的定位、导航和授时服务,其建设与发展则遵循开放性、自主性、兼容性、渐进性。北斗卫星定位车载终端采用了多模块化、组合式优化设计,内置高性能芯片,各模块之间的接口采用标准接口,充分利用系统平台、移动通讯网络、因特网络,将汽车行驶记录仪、卫星定位、卫星导航、油耗检测功能集于一体,通过无线数据通讯接口(GSM、GPRS、CDMA)和GPS接口,能与监控中心系统进行数据通信和移动位置的定位,能够满足用户的多种需求。 除具有传统行驶记录仪的功能外增加了定位导航、监控跟踪、数据实时传送、油耗检测等功能,并且能够实现对车辆实时监管、调度,遇险报警远程网络监控,彻底改变了现有汽车行驶记录仪只能实地监管、事后监督的弊端;GPS/北斗2双模卫星定位模块,可以灵活配置信号处理通道工作于单GPS模式,或单北斗2模式,或GPS/北斗2混合模式;兼容目前现有的GPS单模定位,且能实现双模捕获、双模跟踪更加智能化、集成化。因此,基于以上原理设计的卫星车载终端监控系统,大大超出了传统行驶记录仪的功能,具有极为光明的发展前景。 四、设计方案 (一)设计原则 1、先进性和适用性相结合 系统采用成熟的高新科技,以目前较为先进的方法实现需要的功能,保证系统具有深厚的发展潜力,在相当长的时间内具有领先水平。 2、通用性和安全性相结合 在系统设计过程中,均留有相应的通信接口,系统的各个模块构成一个有机的整体。系统数据库中的各种数据在交换和共享的过程中,充分考虑到了系统的安全性。对每一个用户的权限有严格的认证(司机卡身份识别)体制,对每一个用户的权限进行分级控制和限定。
车载系统发展现状分析
车载系统发展现状分析
智能汽车与智能交通 1 定义 1.1智能汽车 从结构上定义:搭载通用操作系统,具备完整计算功能,拥有无线网络连接,配置多种外设接口,自身操作组件与汽车部件相融合;集环境感知、规划决策与多等级辅助驾驶于一体的综合性系统 1.2 智能交通 智能交通,通常用“车联网”概念来代替,即对每一辆汽车进行交通全程控制,对每一条道路进行交通全时空控制,以提供交通效率和交通安全。 一般分为三层: 第一感知层,通过传感技术构成感知系统,感知网内的单个汽车载体;第二是互联互通层,即车与车、车与路之间的互相联系、通讯;最后是管理层,通过云计算等智能平台,实现车辆调度和管理。 2 关键技术 2.1 智能汽车的关键技术 按照智能汽车系统中车载信息设备从底层
到应用层的层级顺序,关键技术可以分为: 2.1.1 芯片级的处理器 适用于移动平台的低功耗处理器分为两类:一种是Intel的Atom平台,一种是ARM平台。目前市售的主流智能手机都基于ARM的Cortex-A8核心。Intel是最先明确表达向车载系统进军的移动芯片厂商,基于CISC的Atom是X86平台上唯一和和RISC架构的RAM处理器对抗的产品。Intel将Atom划分出很多种类的做法,分别面向嵌入式系统、简易PC系统以及车载系统等等。 2.1.2 移动操作系统 与智能手机类似,智能汽车的操作系统也集中在Android与IOS两大类。 2.1.3 应用层开发 作为一般开发者,应用层是产品研发与立足的关键,如何设计出友好性、功能性与可靠新兼备的应用软件,直接决定用户体验的好坏,并影响消费者的接受程度。 1)面向汽车的软件开发 将汽车自身部件与操作系统融合,是智能平台搭载的关键。准确可靠地检测汽车信号,是安
201110396255-车载多媒体的自动化测试系统
SooPAT 车载多媒体的自动化测试系统 申请号:201110396255.0 申请日:2012-03-22 申请(专利权)人深圳市金凯博自动化测试有限公司 地址518100 广东省深圳市宝安区创业二路朗田大厦四楼深圳市金 凯博自动化测试有限公司 发明(设计)人段海 主分类号G01R31/00(2006.01)I 分类号G01R31/00(2006.01)I G01C25/00(2006.01)I G11B20/18(2006.01)I 公开(公告)号102539955A 公开(公告)日2012-07-04 专利代理机构东莞市中正知识产权事务所 44231 代理人刘林
(10)申请公布号 CN 102539955 A (43)申请公布日 2012.07.04C N 102539955 A *CN102539955A* (21)申请号 201110396255.0 (22)申请日 2012.03.22 G01R 31/00(2006.01) G01C 25/00(2006.01) G11B 20/18(2006.01) (71)申请人深圳市金凯博自动化测试有限公司 地址518100 广东省深圳市宝安区创业二路 朗田大厦四楼深圳市金凯博自动化测 试有限公司 (72)发明人段海 (74)专利代理机构东莞市中正知识产权事务所 44231 代理人 刘林 (54)发明名称 车载多媒体的自动化测试系统 (57)摘要 本发明的车载多媒体的自动化测试系统,适 用于测试车载多媒体的性能,其中包括一控制计 算机和与该控制计算机电连接且由该控制计算机 控制的测试装置,该控制计算机内预设有一车载 多媒体测试程序,该车载多媒体测试程序激活后 可自动执行测试步骤,该测试装置接收控制计算 机发送的多媒体测试信号,完成对多媒体的测试, 并将采集的多媒体数据反馈给控制计算机,由该 控制计算机分析与处理数据并将测试结果输出显 示;本发明的车载多媒体自动化测试系统可自动 执行对多媒体的多种功能测试,并将结构清楚的 显示,整个测试过程自动化程度很高,且其面对测 试人员的操作动作简单。 (51)Int.Cl. 权利要求书2页 说明书5页 附图5页 (19)中华人民共和国国家知识产权局(12)发明专利申请 权利要求书 2 页 说明书 5 页 附图 5 页
GPS车载终端安装技术规范
GPS车载终端安装技术规X 由于车载卫星定位系统属高精密设备产品,必须要有一个良好稳定的工作环境,才能充分发挥其优良的工作性能,所以在安装过程中对其安装的方法和安装位置的确定至关重要。对于各种车型的不同,其安装位置和方法也不尽相同,要安装好一套车载定位设备,既要对设备配置熟悉又要对车辆情况有一定的了解。 首先要了解车载卫星定位系统总体结构和原理,系统主要是利用3星定位原理通过主机接收并处理GPS定位信息,由GPRS数字移动通信系统将GPS定位信息送到调度中心实施监控。车载式卫星定位系统的主要构成部分:车载终端(车台)、LCD显示屏、通话手柄、GPS天线、GSM天线、报警控制器以及其它选配附件和连线等;其次是要了解车辆车型及车辆结构,目前国内路面上行使机动车辆种类大致可分为轿车、面包车、中小型货车及大型半挂牵引集装厢车等车型。 车载设备主要技术参数: ◆工作电压:直流12V或24V ◆工作电流:200mA(待机状态) ◆频率X围:GPS 15750.42 MHz ◆通信速率:9600bps ◆定位精度:25m (无SA、无差分2σ) ◆速度精度:≤0.2m/s ◆动态特性:不小于4g ◆通讯X围:短消息已开通的GSM全网
下面详细介绍A VLS-80型车载卫星定位终端在各种车型中安装方法和安装位置。 *安装时所需工具: 小型电钻一把;十字、一字改锥各一把;万用表(或汽车试电笔0~24V)一个(支);尖嘴钳、老虎钳、剥线钳或剪刀一把;Φ10圆锉一把;记号笔一支; *安装时所需耗材: Φ3、Φ5钻头若干;绝缘胶布、双面贴、扎线带、螺丝(Φ4×15㎜自攻、Φ4×10㎜自攻、Φ5×15㎜带螺母平头、Φ5×10㎜带螺母平头螺丝及配套垫片)若干; 一.轿车系列: 车台: 由于车台抗干扰性较弱,易受外界各种信号的干扰,从而影响车台的工作稳定性,而轿车均为发动机前置结构,在行驶过程中,其缸体上的火花塞会不断产生各种不同频段的电磁波,特别是高压点火线圈也位于发动机室内,且离驾驶室很近,它也会在工作时不断产生杂乱的高频电磁波,而且干扰强度有甚于火花塞的干扰。另外,霍尔传感器、分电器、信号放大器、仪表盘内的转速表等车辆配置均是依靠高压脉冲感应原理来工作的,也会产生不同程度的干扰信号。如果将车台安装在车辆前部将严重遭受这些电磁波的干扰而影响车台正常工
DM8002部标车载终端使用说明
GPS智能终端 【DM8002型】 使 用 手 册 二零一三年七月
手册版本:V2.0 发行日期:2013-7-3 版权保护 我们非常仔细整理此使用手册,但我们对于此使用手册的内容不保证完全正确。因为我们的产品一直在持续地改良及更新,故我方保留随时修改的权利,恕不另行通知。 修订记录 修订版本修订记录日期 V2.0 制定标准2013年7月3日 技术支持 如果您的设备发生问题并且无法从用户手册上得到解决方案,请联系您的购买商或当地批发商. 尊敬的客户: 您好!非常感谢您使用DM8002系列GPS汽车定位行驶记录仪车载终端产品。使用前请务必仔细通读本手册,请留意手册上提到的所有注意和警告事项,请妥善保存好本手册,以备参考。 在设备使用前,宜将其置于稳固的平台上。 在设备连线前,请确认电压值,连线应置于不会被践踏的地方。 在插拔任何模块或连线前,请先断开电源。 请保持设备的干燥,不得将任何液体进入设备中,否则会造成严重损坏或电路瘫痪。 如果发生以下情况,请找专业人员处理: 电源线、键盘或插座损坏 液体渗入设备内 设备工作不正常或不能通过本手册的指导使其正常工作 设备跌落或受创不能正常工作 设备有明显的破损现象
目录 一、终端产品简介 (3) 二、终端基本功能简介 (3) 三、终端产品特性 (6) 技术参数 (6) 可接外设功能说明 (7) 接口定义 (8) 各接口图示 (10) 产品安装示意图 (13) 四、终端入网设置 (14) 五、包装内容 (14) 六、安装说明 (15) 七、故障排除 (16)
一、终端产品简介 GPS汽车定位行驶记录仪车载终端设备,采用GPRS/CDMA和SMS双模式通信方式,采用高精度GPS定位模块,工业级通信模块.设备运行稳定可靠,功能全,接口多,可根据不同的行业,不同的用户量身定做. DM8002带有卫星定位功能的汽车行驶状态数据记录设备。它可对车辆运行参数进行实时记录、显示和查询;可为车辆和交通管理提供真实的原始数据,为安全提供进一步的保障。通过无线数据通讯接口(GSM/GPRS/CDMA)和GPS接口,能与监控中心系统进行数据通信和移动位置的定位,能够满足用户的多种需求。 二、终端基本功能简介 1)记录仪功能: 一、能记录最近960小时内与实时时间对应的每分钟车辆位置及状态数据,数据包含车辆行驶的数据时间、经度、纬度、速度、方向、定位状态、累计行驶里程、实时油量值、电瓶电压以及记录仪信号量。 二、能记录最后15次每一次的停车前20秒内与实时时间对应的车辆行驶速度值及刹车状态。 三、能记录驾驶员疲劳驾驶数据,可以记录疲劳驾驶开始时间、结束时间以及持续时间。能记录司机驾驶证号。 2)数据设置及采集功能: 支持使用RS232串行通讯接口,能通过串口获取车辆最近960小时或者最近2天内车辆历史轨迹数据、行驶速度数据、行驶里程数据,能设置和采集驾驶员代码、机动车驾驶证号码数据,能设置主机采集的时间间隔和里程间隔,能设置和采集车辆VIN号、车牌号码、车牌分类,能采集最后15次每一次的停车前20秒内与实时时间对应的车辆行驶状态值,包含ACC 、左转向灯、右转向灯、振动、脚刹、手刹、前门、后门、喇叭信号量以及速度传感器信号量检测,能设置速度传感器校正系数。 3)打印功能: 显示屏内置打印机,只需利用显示屏操作即可完成数据打印,打印内容包括车牌号码、车牌分类、驾驶员代码、驾驶证号码、打印实时时间、停车时刻前15分钟内每分钟的平均车速、疲劳
新能源汽车控制系统
《新能源汽车控制系统》教学大纲 总学时:32H 学分:2 基本面向:自动化 所属单位:自动化系 一、本课程的目的、性质及任务 本课程是专业方向任选课程,是机械、电力电子、自动控制、化工等诸多技术和学科应用于汽车工程上的一门综合技术,也是一个国家现代化水平的重要标志之一。本课程的任务是使学生学习综合、系统地应用自动控制专业知识,熟悉并初步掌握新能源汽车控制系统的原理和基本设计思路与方法,具备开发新能源汽车控制系统的初步研制能力。力求使学生能结合我国汽车工业和控制技术应用等领域的现状和发展,了解国内外新能源汽车研制的新成果和新动态,拓展知识面,提高相关的专业技能。 二、本课程的基本要求 1、全面理解新能源汽车与燃油汽车的区别,了解新能源汽车的性能、特点、结构与指标要求,以及最新的发展动态。 2、综合应用自动控制专业知识,进一步理解掌握新能源汽车的控制技术,包括新能源汽车驱动系统控制机构和控制策略。掌握新能源汽车构成原理及设计步骤。 3、以新能源汽车为控制对象,进一步学习新能源汽车控制系统的新技术和发展趋势,学习系统地应用自动控制专业知识的方法,提高专业实际分析能 力和应用技能。 三、本课程与其它课程的关系(课程的前修后续关系) 前修课程:自动控制原理、电力电子技术、电机与拖动基础、运动控制系统、汽车理论与构造基础、汽车电子控制技术 后续课程:无 四、本课程的教学内容 第一章绪论 1、新能源汽车的定义和分类 2、新能源汽车产生和发展的原因
3、新能源汽车的发展历史 4、新能源汽车的基本结构 5、新能源汽车的主要行驶性能指标 第二章新能源汽车 1、纯电动汽车 2、混合动力电动汽车 3、太阳能电动汽车 4、燃料电池电动汽车 5、气体燃料汽车 6、生物燃料汽车 第三章新能源汽车的电动机驱动系统 1、电动机驱动系统概述 2、直流电动机的驱动系统 3、交流异步电动机驱动系统 4、永磁电动机的驱动系统 5、开关磁阻电动机驱动系统1 6、其他电动机驱动系统 7、新能源汽车电驱动系统的发展方向 第四章新能源汽车的储能装置 1、动力电池概述 2、铅酸蓄电池 3、镍氢蓄电池 4、钠硫蓄电池 5、动力锂电池 6、燃料电池 7、空气电池 8、超级电容 9、飞轮储能器 第五章新能源汽车的能量管理系统
北斗卫星定位车载终端技术方案
北斗卫星定位车载终端技术方案
北斗卫星定位车载终端技术方案 三、技术原理 北斗卫星导航系统是中国自行研制开发的区域性有源三维卫星定位与通信系统(CNSS),是除美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统。北斗卫星导航系统为用户提供高质量的定位、导航和授时服务,其建设与发展则遵循开放性、自主性、兼容性、渐进性。北斗卫星定位车载终端采用了多模块化、组合式优化设计,内置高性能芯片,各模块之间的接口采用标准接口,充分利用系统平台、移动通讯网络、因特网络,将汽车行驶记录仪、卫星定位、卫星导航、油耗检测功能集于一体,经过无线数据通讯接口(GSM、GPRS、CDMA)和GPS接口,能与监控中心系统进行数据通信和移动位置的定位,能够满足用户的多种需求。 除具有传统行驶记录仪的功能外增加了定位导航、监控跟踪、数据实时传送、油耗检测等功能,而且能够实现对车辆实时监管、调度,遇险报警远程网络监控,彻底改变了现有汽车行驶记录仪只能实地监管、事后监督的弊端;GPS/北斗2双模卫星定位模块,能够灵活配置信号处理通道工作于单GPS模式,或单北斗2模式,或GPS/北斗2混合模式;兼容当前现有的GPS单模定位,且能实现双模捕获、双模跟踪更加智能化、集成化。因此,基于以上原理设计的卫星车载终端监控系统,大大超出了传统行驶记录仪的功能,具有极为光明的发展前景。
四、设计方案 (一)设计原则 1、先进性和适用性相结合 系统采用成熟的高新科技,以当前较为先进的方法实现需要的功能,保证系统具有深厚的发展潜力,在相当长的时间内具有领先水平。 2、通用性和安全性相结合 在系统设计过程中,均留有相应的通信接口,系统的各个模块构成一个有机的整体。系统数据库中的各种数据在交换和共享的过程中,充分考虑到了系统的安全性。对每一个用户的权限有严格的认证(司机卡身份识别)体制,对每一个用户的权限进行分级控制和限定。 3、安全可靠性 在经济条件允许范围内,从系统结构、设计方案(考虑到非法用户及病毒入侵,数据采用纠错冗余技术)、技术保障等方面综合考虑;系统尽可能地采用成熟的技术、商品化的软硬件产品,保证系统可靠稳定运行。 4、实用性 整个系统的操作以方使、简捷、高效为目标,多操作平台整体设计,统一操作,既充分体现快速反应的特点,又能便于工作人员进行业务处理和综合管理,便于运输交通管理层及时了解各项统
JTT道路运输车辆卫星定位系统车载终端技术要求
J T T道路运输车辆卫星定位系统车载终端技术 要求 集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]
; M32 中华人民共和国交通运输行业标准 JT/T 794—2011 道路运输车辆卫星定位系统车载终端技术要求 GNSS system for operating vehicles —Technical specifications for vehicle terminals 2011-02-28 发布 2011-05-08 实施 中华人民共和国交通运输部发布 JT/T 794—2011 目次 前 言 ..................................................................... .................................................................... II 1 范 围 ..................................................................... ........................................................................ .1 2 规范性引用文 件 ..................................................................... .....................................................1 3 术语、定义和缩略语...................................................................... (1)