九年级上册第十一章 简单机械和功单元测试与练习(word解析版)

九年级上册第十一章简单机械和功单元测试与练习(word解析版)
一、初三物理第十一章简单机械和功易错压轴题提优(难)
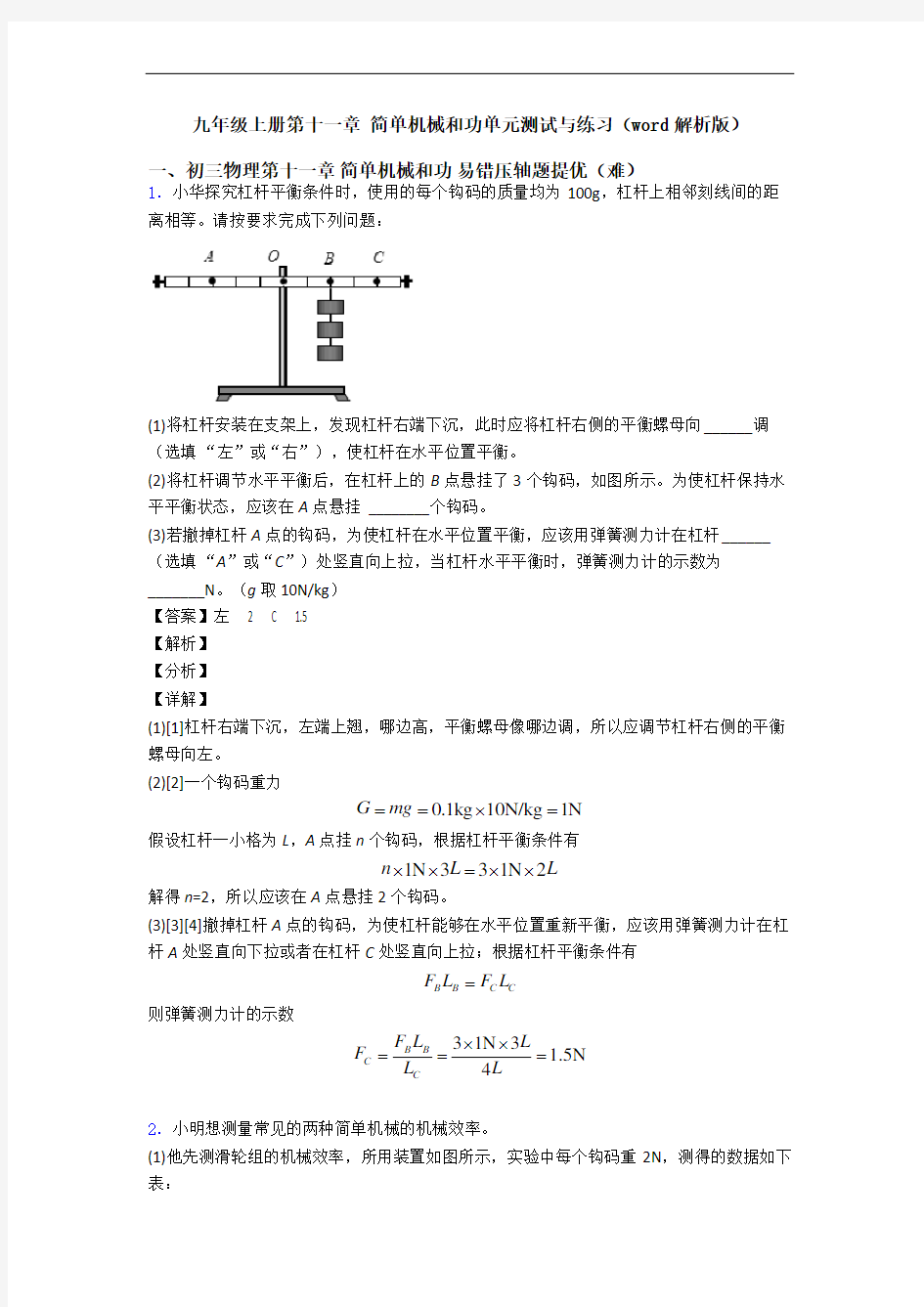
1.小华探究杠杆平衡条件时,使用的每个钩码的质量均为100g,杠杆上相邻刻线间的距离相等。请按要求完成下列问题:
(1)将杠杆安装在支架上,发现杠杆右端下沉,此时应将杠杆右侧的平衡螺母向______调(选填“左”或“右”),使杠杆在水平位置平衡。
(2)将杠杆调节水平平衡后,在杠杆上的B点悬挂了3个钩码,如图所示。为使杠杆保持水平平衡状态,应该在A点悬挂 ________个钩码。
(3)若撤掉杠杆A点的钩码,为使杠杆在水平位置平衡,应该用弹簧测力计在杠杆______(选填“A”或“C”)处竖直向上拉,当杠杆水平平衡时,弹簧测力计的示数为
_______N。(g取10N/kg)
【答案】左 2 C 1.5
【解析】
【分析】
【详解】
(1)[1]杠杆右端下沉,左端上翘,哪边高,平衡螺母像哪边调,所以应调节杠杆右侧的平衡螺母向左。
(2)[2]一个钩码重力
0.1kg10N/kg1N
G mg
==?=
假设杠杆一小格为L,A点挂n个钩码,根据杠杆平衡条件有
1N331N2
n L L
??=??
解得n=2,所以应该在A点悬挂2个钩码。
(3)[3][4]撤掉杠杆A点的钩码,为使杠杆能够在水平位置重新平衡,应该用弹簧测力计在杠杆A处竖直向下拉或者在杠杆C处竖直向上拉;根据杠杆平衡条件有
B B
C C
F L F L
=
则弹簧测力计的示数
31N3
1.5N
4
B B
C
C
F L L
F
L L
??
===
2.小明想测量常见的两种简单机械的机械效率。
(1)他先测滑轮组的机械效率,所用装置如图所示,实验中每个钩码重2N,测得的数据如下表:
次数钩码总重G/N 钩码上升的高度
h/m
测力计示数F/N
测力计移动距离
s/m
机械效率率η
140.1 1.80.3
260.1 2.40.383% 340.1 1.40.557% 440.2 1.4 1.057%
①在实验中,测绳端拉力F时,应尽量竖直向上_____拉动弹簧测力计;
②第1次实验测得的机械效率为________( 保留整数),第4次实验是用____图做的(选填“a”、“b”或“c”);
③分析第1、3次实验数据可得结论:___________________;
(2)接着小明用如图所示的装置探究杠杆的机械效率,每个钩码的质量为m,O为支点(支点
处的摩擦不计)。
①他先将2只钩码悬挂在B点,在A点竖直向上匀速拉动弹簧测力计,拉力为F1,机械效率为η1;
②然后他将这2只钩码悬挂在C点,在A点竖直向上匀速拉动弹簧测力计,使C点上升高
度与第一次相同,则此时弹簧测力计的示数F2将____ (选填“>”“=”或“<”) F1;
[拓展]对比杠杆实验的第①②两步,判断第②步中杠杆的机械效率η2如何变化并说明理由
_________。
【答案】匀速 74% c使用不同的滑轮组,提升相同的重物,动滑轮越重,滑轮组的机
械效率越小>见详解
【解析】 【分析】 【详解】
(1)[1]测绳端拉力F 时, 应尽量竖直向上匀速拉动弹簧测力计,使物体处于平衡状态。 [2]第1次实验测得的机械效率为
4N 0.1m
100%100%100%74%1.8N 0.3m
W Gh W Fs η?=
?=?=?=?有用总 [3]第4次实验,钩码上升的高度为0.2m ,测力计移动距离为1.0m 。则绳子股数为
1.0m
=50.2m
s n h =
=绳 第4次实验是用图c 做的。
[4]分析第1、3次实验数据,提升重物相同,但第1次实验,应用图a 一个动滑轮的滑轮组进行试验,第3次实验,应用图c 两个动滑轮的滑轮组进行试验,第一次机械效率高于第3次实验数据,可得结论:使用不同的滑轮组,提升相同的重物,动滑轮越重,滑轮组的机械效率越小
(2)[5]钩码从B 点移动到C 点,阻力不变阻力臂变长,弹簧测力计位置不变,动力力臂不变,根据杠杆平衡条件可知,弹簧测力计的示数将变大,则F 2>F 1。
[6] η2变大,因为C 点被提的高度相同,克服杠杆自身重力所做的额外功相同,钩码提升的高度增加,有用功变大,根据
100%W W W η=?+有
有额
可知η2变大。
3.如图所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向______(左/右)调节,使杠杆在不挂钩码时在水平位置平衡。其目的是______;
(2)杠杆调节平衡后,小明在杠杆上A 点处挂4个钩码,在B 点处挂6个钩码,杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:______(用字母表示)。他这样得出的结论______(合理/不合理);原因是:______;
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件
是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于水平平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是:______。
【答案】左 减小了杠杆的自重对实验的影响 1122Fl F l 不合理 实验次数较少,得出的结论不具有普遍性 杠杆本身受到重力 【解析】 【分析】 【详解】
(1)[1]发现杠杆右端下沉,说明右端重,应该把杠杆两端的平衡螺母向左调。
[2]使杠杆在不挂钩码时在水平位置平衡。其目的是把重心移至支点处,让杠杆重力的力臂为零,这样就减小了杠杆的自重对实验的影响。
(2)[3][4][5]杠杆的平衡条件为:动力×动力臂=阻力×阻力臂,探究杠杆平衡的条件多次测量就是为了寻找普遍规律,本次实验,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律。
(3)[6]图乙中,支点位于动力和阻力的右侧,杠杆的重心不在支点上,弹簧测力计不但提了钩码,而且还提了杠杆,杠杆的重力对杠杆转动产生了影响,导致拉力F 的大小比由杠杆平衡条件计算出来的数值偏大。
4.小飞用图甲装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力F 1和阻力F 2,l 1和l 2分别表示动力臂和阻力臂.他的实验思路是:改变F 2、l 1和l 2,测得杠杆平衡时所需的拉力F 1,来寻找F 1、F 2、l 1和l 2四个物理量之间的关系.已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为0~5N ,杠杆上每一格长10cm .
实验次数 阻力F 2/N 阻力臂l 2/cm 动力臂l 1/cm 动力F 1/N
1 4 33 30
2 4 18 30 2.4 3
4
7.5
30
1.0
(1)为便于测量力臂,弹簧测力计应沿_______方向拉杠杆,并使之在_____位置平衡;
(
2)小飞首先保持F 2和l 1不变而改变l 2,所获得的实验数据如表格所示.第1次实验中弹簧测力计示数的放大图如图乙所示,则F 1=______N ,此时杠杆的类型与______(选填“筷子”或“老虎钳”)相同;
(3)为获得更多组数据,小飞继续进行(2)中实验,则为能顺利完成实验,在改变阻力臂l 2时,l 2应不超过______cm ;完成上述实验后,小飞接下来还应进行的实验有:①保持______不变而改变F 2;②保持F 2和l 2不变而改变l 1. 【答案】竖直 水平 4.4 筷子 37.5 l 2和l 1 【解析】 【分析】 【详解】
第一空、第二空.因为力与力臂垂直,当沿竖直方向拉动弹簧测力计使杠杆位于水平位置平衡时,力臂与杠杆重合,可方便的测量力臂的大小;
第三空.由图像可知,弹簧测力计的分度值为0.1N ,示数为4.4N ;
第四空.由表格数据知第1次实验中阻力臂长于动力臂,因此是费力杠杆,与筷子相同; 第五空.由杠杆平衡条件1122Fl F l =可得:
11225N?30cm
=37.5cm 4N
F l l F =
= 即l 2应不超过37.5cm ;
第六空.探究杠杆的平衡条件时要探究F 1、F 2、l 1和l 2四个物理量之间的关系,因此还应探究①保持l 2和l 1不变而改变F 2;②保持F 2和l 2不变而改变l 1.
5.某实验小组进行测量滑轮组机械效率的实验,先用弹簧测力计测量钩码所受的重力G (如图甲),再按图乙所示的连接方式组装好滑轮组,并分别记下钩码和弹簧测力计的起始位置:
(1)如图乙中,为了测量绳子自由端的拉力F ,A 同学在缓慢匀速提升时读数,B 同学在弹簧测力计静止时读数,然后把测得各个量数值,代入机械效率的公式,计算出机械效率的值,这两位同学_______(选填“A ”或“B ”)操作是正确的;
(2)按照A 同学的测量方法,测出的拉力F 与钩码所受重力G 的大小关系为F ______(选填“大于”、“小于”或“等于”)
3
G
; (3)实验中要分别记下钩码和弹簧测力计的起始位置,是为了_________。 【答案】A
大于 测量钩码和弹簧测力计移动的距离 【解析】 【分析】
(1)在使用滑轮组时,滑轮组还要克服一些机械摩擦,所以要测量滑轮组的机械效率,需使物体上升进行读数。
(2)使用滑轮组时,拉力不仅要克服物体的重力,还要克服动滑轮的重力及机械摩擦。
(3)要测滑轮组的机械效率,需测出G 、h 、F 、s ,根据公式100%Gh
Fs
η=
?计算。所以需要测量钩码和弹簧测力计移动的距离,从而计算有用功和总功。 【详解】
(1)[1]为了测量滑轮组提升物体时的机械效率,所以需在缓慢匀速提升时读数,则A 同学操作正确。
(2)[2]由图知,滑轮组由3段绳子承担物重,则3
G
F =,但其成立的条件是不考虑机械自重和摩擦,若考虑的话拉力F 大于
3
G 。 (3)[3]为了测量钩码和弹簧测力计移动的距离,从而计算有用功和总功,应分别记下钩码和弹簧测力计的起始位置。
6.在“研究杠杆平衡条件”的实验中:
(1)杠杆两端的平衡螺母的作用是:调节杠杆在_____位置平衡。
(2)如图甲所示的杠杆已处于平衡状态,若左端所挂重物的重力是1N ,则弹簧测力计的示数_____2N 。如果要便于测量力臂,那么弹簧测力计应沿_____方向拉着杠杆。
(3)如乙图所示,在杠杆左端某一固定位置挂一个重力G =10N 的物体,在杠杆右端不同位置处施加不同的竖直向下的力F ,保证杠杆处于平衡状态。根据多次测量的F 、L 数据,画出如图丙所示图线,由图丙可得出杠杆平衡的条件是F 与L 成_____比,结合杠杆平衡条件,可求出重力G 的力臂是_____cm 。 【答案】水平 大于 竖直 反 5 【解析】 【分析】 【详解】
(1)[1]力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来。
(2)[2][3]根据杠杆的平衡条件
42G l F l ?=?
解得
F =2
G =2×1N=2N
由图甲可知F 的力臂小于2l ,故弹簧测力计的示数大于2N ;如果要便于测量力臂,那么弹簧测力计应沿竖直方向拉着杠杆。
(3)[4][5]如乙图,F 和1
L
成正比,1F
L
为定值,所以FL 为定值,可以推断F —L 成反比。因
为
-11
4m L
=,所以L =0.25m ,根据杠杆平衡条件得 GL FL '=
所以
10N 2N 0.25m L ?'=?
所以
0.05m 5cm L '==
7.如图所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向____选填(“左”或“右”)调节,使杠杆在不挂钩码时,保持___并静止,达到平衡状态。这样做的好处是:________。
(2)杠杆调节平衡后,小明在杠杆上A 点处挂4个钩码,在B 点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:动力×动力臂=阻力×阻力臂。他这样得出的结论是否合理?____;为什么?_____。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是 __________。
【答案】左 水平 便于测量力臂 不合理 只通过一次测量,数据具有偶然性,不具有普遍性 杠杆的重心不在支点上,杠杆的重力对杠杆平衡产生了影响。
【解析】
【分析】
【详解】
(1)[1][2]杠杆右端下沉,应将平衡螺母(左端和右端的平衡螺母调节方向一致)向左调节,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
[3]力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来。
(2)[4][5]只有一次实验总结实验结论是不合理的,一次实验具有偶然性,不具有普遍性,要多进行几次实验,避免偶然性。
(3)[6]用如图乙所示装置进行探究,杠杆的重心没有通过支点,杠杆的重力对杠杆平衡有影响。
8.某实验小组利用图示装置研究杠杆的机械效率,实验的主要步骤如下:
①用轻绳悬挂杠杆一端的D点作为支点,在A点用轻绳悬挂总重为G的钩码,
在占点用轻绳竖直悬挂一个弹簧测力计,使杠杆保持水平;
②竖直向上拉动弹簧测力计缓慢匀速上升(保持0点位置不变),在此过程中弹
簧测力计的读数为F,利用刻度尺分别测出A、B两点上升的高度为h1、h2。
回答下列问题:
(1)杠杆机械效率的表达式为η=____________.(用已知或测量的物理量符号表示)
(2)本次实验中,若提升的钩码重一定,则影响杠杆机械效率的主要因素是:___________
(3)若只将钩码的悬挂点由A移至C,O、B位置不变,仍将钩码提升相同的高度,则杠杆的机械效率将_________(选填“变大”、“变小”或“不变”).
【答案】1
2
100%
Gh
Fh
杠杆的自重变大
【解析】
【分析】
【详解】
(1)有用功为W有=Gh1,总功W总=Fh2,则机械效率的表达式
η=
W
W
有
总
×100%=1
2
Gh
Fh×100%.
(2)有用功是提升钩码所做的功,额外功主要是克服杠杆重力做的功,影响机械效率的因
素主要是有用功和总功所占的比例;提升的钩码重一定说明有用功一定,所以影响杠杆机械效率的主要因素是杠杆自身的重力.
(3)钩码的悬挂点在A点时,由杠杠的平衡条件得G?OA=F?OB;悬挂点移至C点时,由杠杠的平衡条件得G?OC=F?OB,经对比发现,由OA到OC力臂变大,所以拉力F也变大,杠杆提升的高度减小,额外功减小,因此杠杆的机械效率变大.
9.小华研究有关杠杆平衡的问题,他在已调节水平平衡的杠杆上,用弹簧测力计、钩码分别进行实验,研究过程如图所示(弹簧测力计对杠杆的力为动力、钩码对杠杆的力为阻力,钩码均相同且位置保持不变),请你根据实验情况和测量结果进行分析和归纳。
(1)由______两图中动力与动力臂大小间的关系可初步看出:阻力与阻力臂不变,当杠杆平衡时,动力臂越大,所用动力越小;
(2)根据四个图中杠杆的平衡情况与动力、阻力使杠杆转动方向的关系可知:
(a)当动力、阻力使杠杆转动方向__________时,杠杆不能平衡;
(b)当________________时,杠杆_____________(选填“一定”或“可能”)平衡。
【答案】ab 相同动力、阻力使杠杆转动方向相反可能
【解析】
【详解】
(1)[1] 观察a、b两图中弹簧秤示数变化情况可知:在杠杆平衡时,当阻力与阻力臂不变时,阻力和阻力臂乘积不变,动力臂越长,动力越小;
(2)(a)[2] 观察(c)图中杠杆不能在水平位置平衡的原因是动力和阻力使杠杆转动的方向相同。
(b)[3][4] 由(a)(b)(d)得,动力和阻力使杠杆转动方向相反,杠杆可能处于水平位置平衡。
10.如图所示,是小王利用刻度均匀的杠杆进行探究“杠杆的平衡条件”。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时杠杆左端下沉,这时应将平衡螺母
向___(左/右)端调节,直到杠杆在水平位置平衡;
(2)如图甲所示,在杠杆A 点处挂4个钩码,则在B 点处应挂____个同样的钩码,杠杆仍然在水平位置平衡;
(3)如果小王又进行了如图乙所示的探究,发现用弹簧测力计在C 点竖直向上拉使杠杆仍然处于水平位置平衡时,F ×OC ____G ×OD ;(选填“大于”、“小于”或“等于”)
(4)如图丙是根据“杠杆平衡条件”制作的只需要一个砝码的天平,横梁可绕轴O 在竖直平面内转动,左侧为悬挂在固定位置P 的置物盘,右侧所用砝码是实验室里常见的钩码,用细线挂在右侧带刻度线的横梁上。
①下面是小明测量物体质量的几个主要步骤,最合理的顺序是(只填序号):________ A .将天平放在水平台面上时
B .调整横梁右侧的平衡螺母使横梁上悬挂的重垂线对准底座上的标记
C .将悬挂钩码的细线移到右侧横梁的零刻线Q 处
D .由细线在横梁上的位置对应的刻度值直接得出物体的质量
E .将待测物体放在天平左侧的置物盘中
F .移动悬挂钩码的细线使横梁上悬挂的重垂线对准底座上的标记
②调节天平至水平位置平衡后,刚把待测物体放在天平左侧的置物盘中时,横梁上悬挂的重垂线将对准底座上标记的________侧(填“左”或“右”)。 【答案】右 6 大于 ACBEFD 左 【解析】 【详解】
第一空.杠杆静止时杠杆左端下沉,为使杠杆在水平位置平衡,应向右调节平衡螺母; 第二空.设一个钩码的重力为G ,杠杆一小格的长度为L ,则由杠杆平衡条件1122Fl F l =可得:
24362G L
F G L
?=
= 即需要在B 点处应挂6个同样的钩码;
第三空.由图乙可知支点位置位于杠杆右侧,因此杠杆在水平位置平衡时不能排除杠杆自重的影响,因此F ×OC 大于G ×OD ; 第四空.A .将天平放在水平台面上;
C .将悬挂钩码的细线移到右侧横梁的零刻线Q 处(相当于游码回零);
B .调整横梁右侧的平衡螺母使横梁上悬挂的重垂线对准底座上的标记(相当于移动平衡螺母使指针指到分度盘的中央位置);
E .将待测物体放在天平左侧的置物盘中(相当于左盘放物体);
F .移动悬挂钩码的细线使横梁上悬挂的重垂线对准底座上的标记(相当于增减砝码或移动游码使天平重新平衡);
D .由细线在横梁上的位置对应的刻度值直接得出物体的质量;
第五空.调节天平至水平位置平衡时,横梁上悬挂的重垂线将对准底座上标记;把待测物体放在天平左侧的置物盘中时,则左盘下降,横梁上悬挂的重垂线将对准底座上标记的左侧。
11.小明小组在“研究杠杆平衡条件”实验中:
(1)实验时应先调节杠杆在______位置平衡,若出现图甲所示情况,应将杠杆的螺母向________调(填“左“或“右“)。
(2)下表是该组某同学在实验中记录杠杆平衡的部分数据:分析表中的1、2两次实验数据可以得出的结论是________.
实验次数F1/N L1/cm F2/N L2/cm
125110
2310215
31204*
(3)第3次实验数据不全,请根据已有信息分析,此处的数据应该是_______;
(4)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在图示位置保持平衡.这时应在B位置挂上_____个钩码.
【答案】水平左F1L1=F2L254
【解析】
【详解】
第一空.实验时为了便于测量力臂,应调节杠杆使其在水平位置平衡;
第二空.由图甲知,左端较高,说明重心偏右,此时应将平衡螺母向左端调节;
第三空.分析1、2两次实验数据,2N×5cm=1N×10cm,3N×10cm=2N×15cm,故得出结论,即杠杆的平衡条件为:F1L1=F2L2;
第四空.根据杠杆平衡条件F1L1=F2L2结合第三次实验数据可得:
1N×20cm=4N×L2,解得L2=5cm;
第五空.设一格为L,一个钩码重G,则有3G×4L=n G×3L,解得n=4,故应在B处挂4个钩码;
12.如图是探究杠杆平衡条件的几个实验情景。
(1)为了在实验中方便读取力臂,探究前和探究过程中我们都应将杠杆调整到____________ 位置平衡。挂钩码前,杠杆在如图甲所示的位置静止,接下来应杠杆两端的螺母适当向_________(选填“左”或“右”)调解。
(2)如图乙,A 点挂有2个重力均为0.5N 的钩码。为了让杠杆在实验所需要的位置平衡, 应在支点右侧B 点(第2格处)挂_________个相同的钩码(每个钩码重均为0.5N)。 (3)改变钩码个数及力臂,多次实验得出结论:杠杆的平衡条件是:__________________。多次实验是为了使实验结论具有_____________性。
(4)如图丙,现给你一个量程为0?2N 的弹簧测力计,若干个重力均为0.5N 的钩码。钩码挂在C 点处,现使用弹簧测力计和钩码使杠杆在水平位置平衡(不计杠杆自重对实 验的影响),则在C 点处所挂钩码的最多个数为__________________个。
【答案】水平 右 3 动力×动力臂=阻力×阻力臂(或1122Fl F l =) 普遍 6 【解析】 【详解】
第一空.当杠杆位于水平位置平衡时,力臂与杠杆重合,可以方便的测量出力臂的大小; 第二空.由图甲可知杠杆左端向下倾斜,因此应向右调节平衡螺母; 第三空.由杠杆平衡条件1122Fl F l =可得:
1N?3
=1.5N 2
A A
B B G l G l =
= 因此应挂3个钩码;
第四空.多次测量总结数据规律可得出,杠杆平衡条件为1122Fl F l =即动力×动力臂=阻力×阻力臂;
第五空.多次实验在物理中有两个目的①使实验结论具有普遍性,避免偶然性②多次测量取平均值,本次实验多次测量的主要目的是使实验结论具有普遍性,避免偶然性; 第六空.由杠杆平衡条件1122Fl F l =知力臂越长越省力,当在杠杆最左端用弹簧测力计施加2N 的力时C 点处所挂钩码最多,为:
2N?6
=3N 4
C G =
即挂钩码的最多个数为6个。
13.小敏同学参加研学旅行时,在湖边捡到一块漂亮的小石块,她用家中常见物品与刻度尺巧妙地测出了小石块的密度,她的测量方案如下:
①用细绳将一直杆悬挂,调节至水平位置平衡,记下细绳在直杆上的结点位置O ; ②将一重物悬于结点O 左侧的A 点,小石块悬于结点O 的右侧,调整小石块的位置,如图所示,当小石块悬于B 点时,直杆在水平位置平衡; ③用刻度尺测量OA 的长度为L 1,OB 的长度为L 2;
④保持重物的悬点位置A 不变,将结点O 右侧的小石块浸没在盛水的杯中(且未与杯底、杯壁接触),调整小石块的悬点位置,当小石块悬于C 点时,直杆在水平位置平衡; ⑤用刻度尺测量OC 的长度为L 3。 请根据她的测量方案回答以下问题
(1)实验中三次调节了直杆在水平位置平衡。其中,第一次调节水平平衡是________,第二次调节水平平衡是_______;(选填“a”或“b”) a.消除直杆自重的影响 b.便于测量力臂
(2)实验中长度_______(选填“L 1”、“L 2”或“L 3”)的测量是多余的; (3)C 点应该在B 点的________(选填“左”或“右”)侧;
(4)小石块密度的表达式为ρ=___(选用字母ρ木、L 1、L 2、L 3表示)。 【答案】a b L 1 右 3
32L L L 水
ρ- 【解析】 【详解】
(1)杠杆在使用时会受自身重力的影响,因此在使用时应先将杠杆调至水平位置平衡,以消除杠杆自重的影响,重物与石块的重力均竖直向下,由力臂垂直于力可知将杠杆调至水平位置平衡时力臂与杠杆重合,测量对应的杠杆长度即可方便的测量出力臂的长度; (2)在空气当中杠杆平衡时由杠杆平衡条件1122F L F L =可知,12G L G L =石物①,在水中杠杆平衡时()13G L G F L =-石浮物② 将①②两式联立可得()
23G L G F L =-石石浮,因为浸没,所以V 石=V 排,结合阿基米德原理可得()
23ρV gL ρV g ρV g L =-石石石石石水,整理可得
3
32
=
L L L -水石ρρ,因此实验中长度L 1的测量是多余的; (3)因为浸没时,石块受到浮力的作用,因此对杠杆的拉力减小了,由杠杆平衡条件1122F L F L =可知拉力减小,力臂变长,所以C 点应该在B 点的右侧;
(4)由(2)推理可知小石块密度的表达式为3
32=
L L L -水
石ρρ。
14.陈晨实验小组用如图所示的同一滑轮组提升不同钩码的方法探究“影响滑轮组机械效
率的因素”,分别做了甲、乙、丙三组实验,实验数据记录如下: 次数 钩码重 G /N 动滑轮重 G 1/N 钩码上升的距离/cm 弹簧测力计的示数/N 弹簧测力计上升的距离/cm 机械效率 1 2 0.8 5 1 15 66.7%
2 4 0.8 5 1.7
15
3
6
0.8
5
15
83.3%
(1)进行第2次测量时,滑轮组的机械效率约为_____(小数点后保留一位有效数字);第3次测量时,弹簧测力计的示数_____N 。
(2)分析实验数据,实验小组得出的实验结论是:滑轮组的机械效率与_____有关。 (3)分析表中数据可知,F ≠
13
G G
+,可能的原因是_____。 【答案】78.4% 2.4 提升钩码的重 绳重及摩擦力 【解析】 【详解】
(1)由表中数据数据可知,滑轮组的效率:
4N?0.05m
=
100%100%100%78.4%1.7N?0.15m
W Gh W Fs η?=?=?≈有总;由图示测力计可知,其分度值为0.2N ,示数为2.4N ;
(2)从实验数据看,动滑轮重力相同,钩码上升的高度、弹簧测力计上升高度都相同,物体越重,机械效率越高,所以滑轮组的机械效率与物体的重力有关;
(3)由于拉动过程中需克服绳子的重力、绳子与轴的摩擦以及滑轮的转轴处的摩擦,所以
13
G G
F +≠
。
15.小明在“测滑轮组机械效率”的实验中,用如图甲所示的滑轮组进行了三次实验,实验数据如下表: 实验次数
物重G/N
物体上升的高度h/cm
测力计的示数F/N
测力计移动的距离s/cm
125115
245 1.717
365 2.415
(1)①在作图甲中的实验时要_____拉动弹簧测力计;表中有一个数据的记录是错误的,错误的数据是_____;
②第3次实验中,滑轮组的机械效率是_____;
③计算3次滑轮组的机械效率并比较,可发现同一滑轮组的机械效率可能与_____有关;(2)小红按图乙组装滑轮组,也进行3次实验。
①通过实验,小红发现用两个动滑轮可以更省_____(选填“力”或“距离”);
②当这两位同学使用各自的滑轮组提升相同的重物时,不计绳重及摩擦,它们的机械效率_____(选填“相同”或“不相同”),理由是:_____。
【答案】竖直向上匀速 17 83.3% 提升物体的重力力不相同按图乙提升相同的重物时,要克服两个动滑轮做更多的额外功
【解析】
【详解】
(1)①在作图甲中的实验时要竖直向上匀速拉动弹簧测力计,此时,系统处于平衡状态,测力计示数等于拉力大小;甲图中,绳子的有效段数为3
n=,故物体上升的高度5cm
h=,测力计移动的距离335cm15cm
s h
===
?,表中有一个数据的记录是错误的,错误的数据是17;
②由表中数据,第3次实验中,滑轮组的机械效率:
333
3
33
3
h6N0.05m
=100%83.3%
2.4N0.15m
W G
W F s
η
?
==?≈
?
有
总
;
③同理计算可知,12
66.7%78.4%
ηη
≈≈
;;由表中数据知,提升物体的重力越来越大,机械效率越来越高,故可发现同一滑轮组的机械效率可能与提升物体的重力有关;(2)小红按图乙组装滑轮组,也进行3次实验。
①图乙中,绳子的有效段数为5,故通过实验,小红发现用两个动滑轮可以更省力;
②当这两位同学使用各自的滑轮组提升相同的重物时,不计绳重及摩擦,故克服动滑轮的重力做的功为额外功的唯一来源,根据
h 100%=
100%=100%W G G
W Gh G h G G η=
???++有总
动动
,图乙中两个动滑轮重力更大,所
以图乙的机械效率低,即它们的机械效率不相同。