第四章 平面机构的力分析
第四章 平面机构的力分析
§4-1机构力分析的目的和方法 1、作用在机械上的力
驱动力:∠VS 锐角(驱动力→原动力)
作功 生产阻力(有效阻力) (+、-) 阻力 : ∠VS 钝角
有害阻力
常见的作用力:原动力、摩擦力、运动副反力、重力、“惯性力”
2、机构力分析的目的和方法
影响及其运动的动力性能→运转性能、调速、平衡、振动、功率分析
力(力矩)
后续机械设计重要参数→尺寸、机构、强度 确定运动副反力→ 强度、摩擦磨损、效率
任务(目的)
确定机构的平衡力(或平衡力矩)→原动机功率?克服生产阻力?
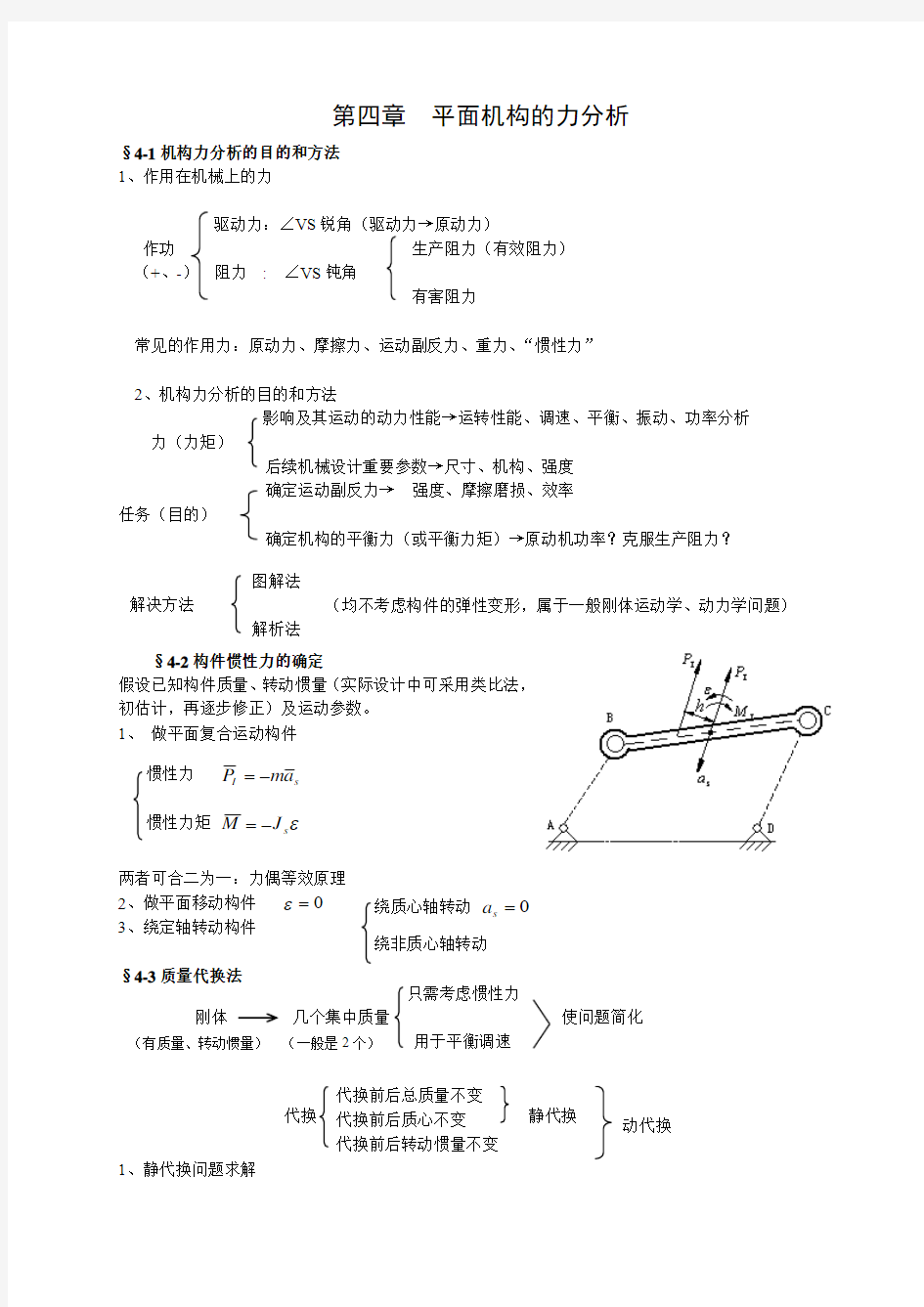
§4-2构件惯性力的确定
假设已知构件质量、转动惯量(实际设计中可采用类比法,初估计,再逐步修正)及运动参数。 1、 做平面复合运动构件
两者可合二为一:力偶等效原理 2、做平面移动构件 0=ε 3、绕定轴转动构件
§4-3质量代换法
1、静代换问题求解
解决方法
图解法
(均不考虑构件的弹性变形,属于一般刚体运动学、动力学问题) 解析法
惯性力 s I a m P -= 惯性力矩 εs J M -= 绕质心轴转动 0=s a 绕非质心轴转动 只需考虑惯性力
刚体 几个集中质量 使问题简化 (有质量、转动惯量) (一般是2个) 用于平衡调速 代换代换前后总质量不变
代换前后质心不变 代换前后转动惯量不变 静代换 动代换
任取B 、C 为代换点:
解得:代换质量
2、 动代换问题的求解
解得
结论:
1) 静代换简单容易,其代换点B 、C 可随意选取。
2) 动代换只能随意选定一点,另外一点由代换条件确定。 3) 使用静代换,其惯性力偶矩将产生误差:
()[]
[][]ε
εε
εm b c k m bc I c b bc c b cb m I c m b m I M C C C B C I --=--=?????
????? ??+++--=?+?--=?2222
4)
m m m C B =+ c m b m c B ?=?
c b c m m B += c b b m m c +=
m m m k B =+ k m b m k B ?=?
c k B I k m b m =+22 (原构件转动惯量
)
k b k m m B += k b b m m k += B C
m I k =
对于一般不很精确的机构,静代换使用较多
两代换点连线必须通过质心
§4-3用图解法作机构的动态静力分析(不考虑摩擦力)
(达朗贝尔原理在机构力分析中的应用) 1、机构组的静定条件
“未知力数目”= 平衡方程数目
结论:
1) 求一个低副反力,需求解两个未知量,而高副则只需一个。
故有静定条件:h l P P n +=23 即:023=--h l P P n 仅有低副时:023=-l P n
2) 杆组即是静定结构。(杆组中不含有未知的外力一定可求解) 2、机构的动态静力学分析
例题4-1 往复式运输机构简图及受力情况。求应加在1构件上X —X 方向上的平衡力。(图、解) 解:
1、作出机构简图并作出运动分析
2、确定各构件中的惯性力(矩),将其加在机构上
3、 取出构件
4、5进行力分析
平衡方程
654555=++++R R P P Q I r
确定运动副反力需求解的未知量 (不考虑摩擦)
转动副:(反力过轴心,大小、方向) 2 移动副:(反力垂直导路,大小、作用点)2 平面高副:(反力沿公法线)
1
图解→45R 、65R
的大小 4、 取出构件2、3进行力分析
2构件对C 点取矩,→求出τ
12R
3构件对C 点取矩,→求出τ
63R
对2、3构件组有:
0121222436363=++++++n
I n R R Q P R R R ττ
图解可解出→n
R 63 、n R 12
的大小
5、取构件2可直接求出
32R
03212212=+++R R Q P
6、取构件1(三力汇交)有:
06121=++R P R b
图解可解出:→b P 、61R
的大小
补充:茹可夫斯基杠杆法
茹可夫斯基杠杆法是求解平衡力的一种简易方法,不必求运动副反力。
①作出机构的转向速度多边形(转900
),无需知道真实运动规律。
②将所有外力(包括惯性力)以力的形式平移至速度矢量图上的对应点上。 ③这些力对极点P 的力矩之和为零。
*外力为惯性力偶矩时,应将惯性力平移后将其替代;外力为力矩时,可将其用作用在选定点上的力来替代。
*实际上,可将作用力均按同一方向转900
,然后再移至速度矢量图上即可(免去转向速度多边形)。 *此法不必求运动副反力就可以求出平衡力(即使需要求运动副反力时,先求出平衡力,再求运动副反力,问题也将简化)。 例1、曲柄滑块机构,已知驱动力矩M ,求滑块在方向上的平衡b P 。
例2、铰链四杆机构,已知外力1P 、3P ,求X —X 方向上的平衡力b P 。
该机构中待求平衡力b P 作用于不与机架相连的构件2上F 点X —X 方向,不论怎样取杆组均不静定,但使用茹可夫斯基杠杆法可顺利求解。
茹可夫斯基杠杆法证明 静力平衡状态,根据虚位移原理
0cos =??∑i
i
i
dS F α
上式除以dt 得此时瞬心功率为零
0cos =??∑i
i
i
v F α
i i i v n αcos ?=
i F 对P 点求矩 i i i i i v F n F α
c o s ??=?
动态静力分析方法难点及注意事项
1、 外力为力矩形式(包括惯性力)应将其转化成力形式加在机构上,这样解题会更方便。
2、 对复杂机构进行力分析,一般应由远离待求平衡里端按杆组取示力体进行分析(即取出的杆组示力
体上不含未知力)。
3、 对杆组和构件示力体,反力的表达:
4、 移动副中反力问题深入的理解
F ''
平衡于r P
杆端受作用力F
F '
=-R (与移动副大小相等方向相反)
实际上,用一个反力R 表示移动副的反力,只是移动副反力的合力(且经过平移),移动副中的真实反力(1R ,2R 或分布力)与移动副的结构有关,它可能大于R 。
5、 如杆组(示力体)未知力因素(大小、方向)超过2个,首先需借助
力或力矩平衡方程针对某一构件求出某些未知力(图解+解析)。
6、 对含有高级杆组(如III 级)的机构,力分析可能困难些(需用其他
方法:如茹科夫斯基杠杆法,特殊点法)
运动学上的III 级机构:若5ω为原动件 力学上的III 级机构:若5M 为待求平衡力矩
(但是:5ω为原动件,1M 为待求平衡力矩,并非力分析上的III 级组)
转动副
n ij R t ij
R
尽可能利用二力杆,三立汇交
移动副
反力垂直导路
作用点需判定
解法:
2构件对E 取矩:→t
R 12,
3构件对F 取矩:→t R 63, 4构件对G 取矩:→t R 64,
整个杆组对特殊点S 取矩:→n R 64,然后再进行图解法求另外两个作用力,即可顺利求解。
7、 实际上,机构设计初期,m 、s J 均未知,只能类比估算出来(极不准确),在此基础上
§4-3用解析法作机构的动态静力分析(可自学,或讲力矩矢量表示法和首解副的概念)
1、 矢量方程解析法
复习:力矩的矢量表达式
P r M ?=0
P r rP P r M
?=-=??=ταα)90cos(sin 0
以下用例题说明如何用解析法作机构动态静力分析
例题:图示为四杆结构,设力P
为作用在构件2上E 点处的已知外力(包括惯性力),r M
为作用在构
类似 运动分析解析法 力分析解析法 数学上均是处理矢量方程
运动学建立方程 力平衡条件建立方程 求反力 确定构件尺寸 m 、s
J (修正)
件3上的已知生产阻力。现在需要确定各运动副中的反力以及需要加于主动件1 上的平衡力矩b M 。
j R i R R R R y x A
41411441+=-== j R i R R R R y x B
12122112+=-== j R i R R R R y x C
23233223+=-== j R i R R R R y x A
41411441+=-==
1、 取杆组
2、3为隔离体(其上外力均已知,其上未知量6个,可解方程为6 格,静定结构),先解决
C 副反力(C 副为首解副,该副连接两构件上外力均已知)。 ①以构件3 为隔离体:
0=∑D
M
,得
cos sin )(32333233232333233=-+-=-+?=-?r y x r y x t
r t M R l R l M j R i R e l M R l θθ (a)
②同理,对2 构件:
0=∑B
M
,得:
)cos()sin(cos sin )()()(2222322232232322322=-----=?+++?-=?++?p p y x t a t a y x t t t t bP aP R l R l P e b e a j R i R e l P b a R l θθθθθθ (b)
联立(a) (b)式,解得: []
????
??
-+-+-=)cos()sin(cos cos )sin(1
222332223p p r p x b a l P l M R θθθθθθθθ
[]
????
??
-+-+-=
)cos()sin(sin sin )sin(1
222332223p p r p x b a l P l M R θθθθθθθθ
③求反力D R 0=∑F
得:
2343R R -=
④求反力B R
0=∑F 得: 03212=++P R R
分别用i
及j
点积上式,可求得:
p x x P R R θcos 2312-= p y y P R R θsin 2312-=
j R i R R y x 121212+=
2、 取构件1为隔离体
①由0=∑F 04121=+R R 得: 2141R R
=
②
1
2111211212111211cos sin )(θθy x y x t
b R l R l j R i R e l R l M +-=+?=?=
**用解析法作机构动态分析一般方法(运动分析、惯性力分析略)
1) 矢量方程的建立
0=∑
M P r M t
?=
0=∑F
2)运动副反力的表达
移动副:反力N 方向垂直导路,作用点也是未知量。(N 代表平移后的反力合力,其真实反力与运动副尺寸结构有关)。
3)“首解副”的选择
就选II 级杆组(外力均已知)的内接副。若其中含有多个II 级杆组,则由远离位置平衡力端开始,可以顺利求解。
其主要形式:
0=∑x
F
0=∑
y F 用矢量i 、j 点积或者向X 、Y 轴投影
jix ijx R R -=(X 方向+) jiy ijy R R -=(Y 方向+) 转动副
对1构件0=∑A M
x x R R 2112-=
对2构件0=∑
C M y y R R 2112-= ① 再对1构件0=∑F A R 再对2构件0=∑
F C R ①
2、矩阵法
图示教练四杆机构的一般受力模型,已知外力:1F
1M 2F 2M 3F 3M ,阻力矩r M ,求平衡力矩
b M 。
1) 基本情况分析:
对整个机构:活动构件为3,可以列出3×3=9个方程 未知量的数目:共 9 个
A R (R 41x , R 41y )、
B R (R 12x , R 12y )、
C R (R 23x , R 23y )、
D R (R 12x , R 12y )、 b M
2) 力矩的直角坐标表示法
作用力I F ,作用点I ,对K 点之矩:
对1构件0=∑A
M
N
对2构件
0=∑C
M
L
②
对1构件0=∑A
M
x R 12
对2构件
0=∑F (平行导路 y
R
12
③
再对1构件
0=∑F A R
再对2构件 0=∑F N
0=∑C
M
L
③
②
再对1构件0=∑F A R
再对2构件
0=∑F C
R
IY I K IX I K K P X X P Y Y M )()(-+-=
3)对构件1列平衡方程式
111111212)()()()(M P X X P Y Y M R X X R Y Y Y A S X A S b Y A B X A B ----=+---
X X X P R R 11214-=-- Y Y Y P R R 11214-=-- 对于构件2、3可得类似方程
222222323)()()()(M P X X P Y Y R X X R Y Y Y B S X B S Y B C X B C ----=---
X X X P R R 22312-=-- Y Y Y P R R 22312-=--
r Y D S X D S Y D C X D C M M P X X P Y Y R X X R Y Y +----=---333333434)()()()(
X X X P R R 22312-=-- Y Y Y P R R 33423-=--
将以上方程缩写成: }]{[}]{[P D R C =
未知力列阵T Y X Y X Y X Y X b R R R R R R R R M R ),,,,,,,,(}{3434232312121414=
已知力列阵T
Y X r Y X Y X P P M M P P M P P M P ),,,,,,,,(}{333222111-=
已知的系数矩阵][C 构件1
构件2
构件3
0=∑X
F 0=∑Y
F
0=∑M
[D
已知的系数矩阵]
矩阵法小结:
①矩阵上各元素排列规律性很强,可以方便的套用,并推广到多杆机构。
②此法也针对杆组列出矩阵式,将矩阵法用于更广泛的机构分析。
③此法不涉及矢量分析,方法简便,易于理解。
④尤其适合计算机求解,可同时解出所有未知量(高斯消去)。
第四章平面机构的力分析
第4章-平面机构力分析习题解答
第四章 平面机构的力分析解答 典型例题解析 例4-1 图4-1所示以锁紧机构,已知各部分尺寸和接触面的摩擦系数f ,转动副的摩擦圆图上虚线圆,在P 力作用下工作面上产生夹紧力Q,试画此时各运动副中的总反力作用线位置和方向(不考虑各构件的质量和转动惯量) 。 图4-1 解 [解答] (1) BC 杆是二力杆,由外载荷P 和Q 判断受压,总反力23R F 和43R F 的位置和方向见图。 (2) 楔块4所受高副移动副转动副的三个总反力相平衡,其位置方向及矢量见图。 (3) 杆2也是三力杆,所受的外力P 与A,B 转动副反力相平衡,三个力的位置见图。 例4-2 图示摇块机构,已知,90 =∠ABC 曲柄长度,86,200,1002mm l mm l mm l BS AC AB ===连 杆的质量,22kg m =连杆对其质心轴的转动惯量22.0074.0m kg J S =,曲柄等角速转动s rad /401=ω, 求连杆的总惯性力及其作用线。
[解答] (1) 速度分析 ,/41s m l v AB B ==ω其方向垂直于AB 且为顺时针方向 32322C C C B C B C +=+= 大小: s m /4 0 0 ? 方向: AB ⊥ BC 取mm s m v /2 .0=μ作速度图如(b ),得 02232===B C B C l v ωω (2)加速度分析 ,/1602 21s m l a AB B ==ω其方向由B 指向A 。 32323t C2B n C2B 2 C C r C C k C B C ++=++= 大小: 160 0 ? 0 0 ? 方向:A B → B C →2 BC ⊥ BC ⊥ BC 取mm s m a 2/8=μ作加速度图如图(C) 22 2/80s m s p a a s =''=μ 222 2/100s m C C a a B C t ='''=μ 222222/76.923160s rad l l l a AB AC B C t B C =-== α,逆时针方向。 (3)计算惯性力,惯性力矩 N a m F S I 160222=-=,方向如图( )所示。 m N J M S I .836.6222-=-=α,方向为顺时针方向。 例4-3 在图示的摆动凸轮机构中,已知作用于摆杆3上的外载荷Q,各转动副的轴颈半径r 和当量摩擦系数v f ,C 点的滑动摩擦因素f 以及机构的各部分尺寸。主动件凸轮2的转向如图,试求图示位置时作用于凸轮2上的驱动力矩M 。
机械原理教案 平面机构的力分析
第四章 平面机构的力分析 §4-1机构力分析的目的和方法 1、作用在机械上的力 驱动力:∠VS 锐角(驱动力→原动力) 作功 生产阻力(有效阻力) (+、-) 阻力 : ∠VS 钝角 有害阻力 常见的作用力:原动力、摩擦力、运动副反力、重力、“惯性力” 2、机构力分析的目的和方法 影响及其运动的动力性能→运转性能、调速、平衡、振动、功率分析 力(力矩) 后续机械设计重要参数→尺寸、机构、强度 确定运动副反力→ 强度、摩擦磨损、效率 任务(目的) 确定机构的平衡力(或平衡力矩)→原动机功率?克服生产阻力? §4-2构件惯性力的确定 假设已知构件质量、转动惯量(实际设计中可采用类比法,初估计,再逐步修正)及运动参数。 1、 做平面复合运动构件 两者可合二为一:力偶等效原理 2、做平面移动构件 0=ε 3、绕定轴转动构件 §4-3质量代换法 1、静代换问题求解 解决方法 图解法 (均不考虑构件的弹性变形,属于一般刚体运动学、动力学问题) 解析法 惯性力 s I a m P -= 惯性力矩 εs J M -= 绕质心轴转动 0=s a 绕非质心轴转动 只需考虑惯性力 刚体 几个集中质量 使问题简化 (有质量、转动惯量) (一般是2个) 用于平衡调速 代换代换前后总质量不变 代换前后质心不变 代换前后转动惯量不变 静代换 动代换
任取B 、C 为代换点: 解得:代换质量 2、 动代换问题的求解 解得 结论: 1) 静代换简单容易,其代换点B 、C 可随意选取。 2) 动代换只能随意选定一点,另外一点由代换条件确定。 3) 使用静代换,其惯性力偶矩将产生误差: ()[] [][]ε εε εmb c k mbc I c b bc c b cb m I c m b m I M C C C B C I --=--=????? ????? ??+++--=?+?--=?2222 4) m m m C B =+ c m b m c B ?=? c b c m m B += c b b m m c += m m m k B =+ k m b m k B ?=? c k B I k m b m =+22 (原构件转动惯量) k b k m m B += k b b m m k += B C m I k =
平面机构的力分析
第四章平面机构的力分析 4-1 选择或填空题 (1)如果作用在径向轴颈上的外力加大,那么轴颈上摩擦圆。 A.变大;B.变小;C.不变;D.不确定。 (2)两运动副的材料一定时,当量摩擦系数取决于。 A.运动副元素的几何形状;B.运动副元素间的相对运动速度大小; C.运动副元素间作用力的大小;D.运动副元素间温差的大小。 (3)机械中采用环形支承的原因是。 A.加工方便;B.避免轴端中心压强过大;C.便于跑合轴端面;D.提高承载能力。(4)移动副中总反力与其相对运动方向的夹角是____。 A.锐角;B.钝角;C.直角;D.不确定。 (5)风机发动机的叶轮受到空气的作用力,此力在机械中属于____。 A.驱动力;B.工作阻力;C.有害阻力;D.摩擦力。 (6)轴径1与轴承2组成转动副,设初始状态时轴径相对轴承静止,轴径受单外力Q作用,当外力Q的作用线与摩擦圆相交时,轴承对轴径的总反力R12的作用线与摩擦圆____;当外力Q的作用线与摩擦圆相切时,轴承对轴径的总反力R12的作用线与摩擦圆____;当外力Q的作用线与摩擦圆相离时,轴承对轴径的总反力R12的作用线与摩擦圆____。 A.相切;B.相交;C.相离;D.不确定。 (7)在外载荷和接触表面状况相同的条件下,三角螺纹的摩擦力要比矩形螺纹的大,是因为____。 A.当量摩擦角大;B.当量摩擦角小;C.摩擦系数大;D.不确定。 4-2图a所示导轨副为由拖板1与导轨2组成的复合移动副,拖板的运动方向垂直于纸面;图b所示为由转动轴1与轴承2组成的复合转动副,轴1绕其轴线转动。现已知各运动副的尺寸如图所示,并设G为外加总载荷,各接触面间的摩擦系数均为f。试分别求导轨副的当量摩擦系数f v和转动副的摩擦圆半径ρ。 解: a) 2θ b) 想一想:①采用当量摩擦系数f v及当量摩擦角?v的意义何在? ②当量摩擦系数f v与实际摩擦系数f不同,是因为两物体接触面几何形状的改变,从而引起摩擦系数改变的结果对 吗? 4-3 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(常数),活塞及其附件的重量G3=21N,连杆重量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离重量l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:(1)选取比例尺(μl=0.005m/mm)做机构运动简图 (2)运动分析:(μv=0.5(m/s)/mm),(μa=75(m/s2)/mm) (3)确定惯性力: 想一想:构件的惯性力的大小、方向及作用点和惯性力偶矩的大小及方向是怎样确定的?总惯性力的大小及作用线方向又如何确定? 4-4 在图示楔块机构中,已知γ=β=60o,Q=1000N,各接触面摩擦系数f=0.15。如Q为有效阻力,试求所需的驱动力F。
平面机构力分析习题解答
第四章平面机构的力分析解答 典型例题解析 例4-1 图4-1所示以锁紧机构,已知各部分尺寸和接触面的摩擦系数f ,转动副的摩擦圆图上虚线圆,在P 力作用下工作面上产生夹紧力Q,试画此时各运动副中的总反力作用线位置和方向(不考虑各构件的质量和转动惯量) 。 图4-1 解 [解答] (1) BC 杆是二力杆,由外载荷P 和Q 判断受压,总反力23R F 和43R F 的位置和方向见图。 (2) 楔块4所受高副移动副转动副的三个总反力相平衡,其位置方向及矢量见图。 (3) 杆2也是三力杆,所受的外力P 与A,B 转动副反力相平衡,三个力的位置见图。 例4-2 图示摇块机构,已知,90 ABC 曲柄长度,86,200,1002mm l mm l mm l BS AC AB 连 杆的质量,22kg m 连杆对其质心轴的转动惯量22.0074.0m kg J S ,曲柄等角速转动s rad /401 , 求连杆的总惯性力及其作用线。
[解答] (1) 速度分析 ,/41s m l v AB B 其方向垂直于AB 且为顺时针方向 32322C C C B C B C 大小: s m /4 0 0 ? 方向: AB BC 取mm s m v /2 .0 作速度图如(b ),得 02232 B C B C l v (2)加速度分析 ,/160221s m l a AB B 其方向由B 指向A 。 32323t C2B n C2B 2 C C r C C k C B C 大小: 160 0 ? 0 0 ? 方向:A B B C 2BC BC BC 取mm s m a 2 /8 作加速度图如图(C) 22 2/80s m s p a a s 222 2/100s m C C a a B C t 222222/76.923160s rad l l l a AB AC B C t B C ,逆时针方向。 (3)计算惯性力,惯性力矩 N a m F S I 160222 ,方向如图( )所示。 m N J M S I .836.6222 ,方向为顺时针方向。 例4-3 在图示的摆动凸轮机构中,已知作用于摆杆3上的外载荷Q,各转动副的轴颈半径r 和当量摩擦系数v f ,C 点的滑动摩擦因素f 以及机构的各部分尺寸。主动件凸轮2的转向如图,试求图示位置时作用于凸轮2上的驱动力矩M 。
3平面机构力分析(包括摩擦和自锁)
A0700003机械原理试卷 一、选择题 1. 在由若干机器并联构成的机组中,若这些机器中单机效率相等均为,则机组的总效率必有如下关系:。 A、B、 C、D、 (为单机台数)。 答案:C 2. 三角螺纹的摩擦矩形螺纹的摩擦,因此,前者多用于。 A、小于; B、等于; ( C、大于; D、传动; E、紧固联接。 答案: CE 3. 在由若干机器串联构成的机组中,若这些机器的单机效率均不相同,其中最高效率和最低效率分别为和,则机组的总效率必有如下关系:。 A、B、
C、D、。 答案: A 4. 构件1、2 间的平面摩擦的总反力的方向与构件2对构件1 的相对运动方向所成角度恒为。 A、 0; - B、 90; C、钝角; D、锐角。 答案: C 5. 反行程自锁的机构,其正行程效率,反行程效 率。 A、B、 C、D、 答案: CD 6. 图示平面接触移动副,为法向作用力,滑块在力作用下沿方向运动,则固定件给滑块的总反力应是图中所示的作用线和方向。
| 答案: A 7. 自锁机构一般是指的机构。 A、正行程自锁; B、反行程自锁; C、正反行程都自锁。 答案: B 8. 图示槽面接触的移动副,若滑动摩擦系数为,则其当量摩擦系数 。 A、 B、 C、 D、 答案: B 9. 在其他条件相同的情况下,矩形螺纹的螺旋与三角螺纹的螺旋相比,前者? A、效率较高,自锁性也较好;
? B、效率较低,但自锁性较好; C、效率较高,但自锁性较差; D、效率较低,自锁性也较差。 答案: C 10. 图示直径为的轴颈1与轴承2组成转动副,摩擦圆半径为,载荷为,驱动力矩为,欲使轴颈加速转动,则应使。 A、=, B、, C、=, D、。 * 答案: D 11. 轴颈1与轴承2 组成转动副,细实线的圆为摩擦圆,轴颈1 受到外力( 驱动力 ) 的作用,则轴颈1 应作运动。 A、等速; B、加速; C、减速。