现代控制理论实验指导报告
山东建筑大学现代控制理论
实验报告
班级:
姓名:
学号:
成绩:
MATLAB 基本知识
0.0 MATLAB 简介
MATLAB 是Mathworks 公司开发的一种集数值计算、符号计算和图形可视化三大基本功能于一体的功能强大、操作简单的优秀工程计算应用软件。MATLAB 不仅可以处理代数问题和数值分析问题,而且还具有强大的图形处理及仿真模拟等功能。MATLAB 最重要的特点是易于扩展。它允许用户自行建立完成指定功能的扩展MATLAB 函数(称为M 文件),从而构成适合于其它领域的工具箱,大大扩展了MATLAB 的应用范围。目前,MATLAB 已成为国际控制界最流行的软件,控制界很多学者将自己擅长的CAD 方法用MATLAB 加以实现,出现了大量的MATLAB 配套工具箱,如控制系统工具箱(control systems toolbox ),系统识别工具箱(system identification toolbox ),鲁棒控制工具箱(robust control toolbox ),信号处理工具箱(signal processing toolbox )以及仿真环境SIMULINK 等。
0.1 MATLAB 桌面系统
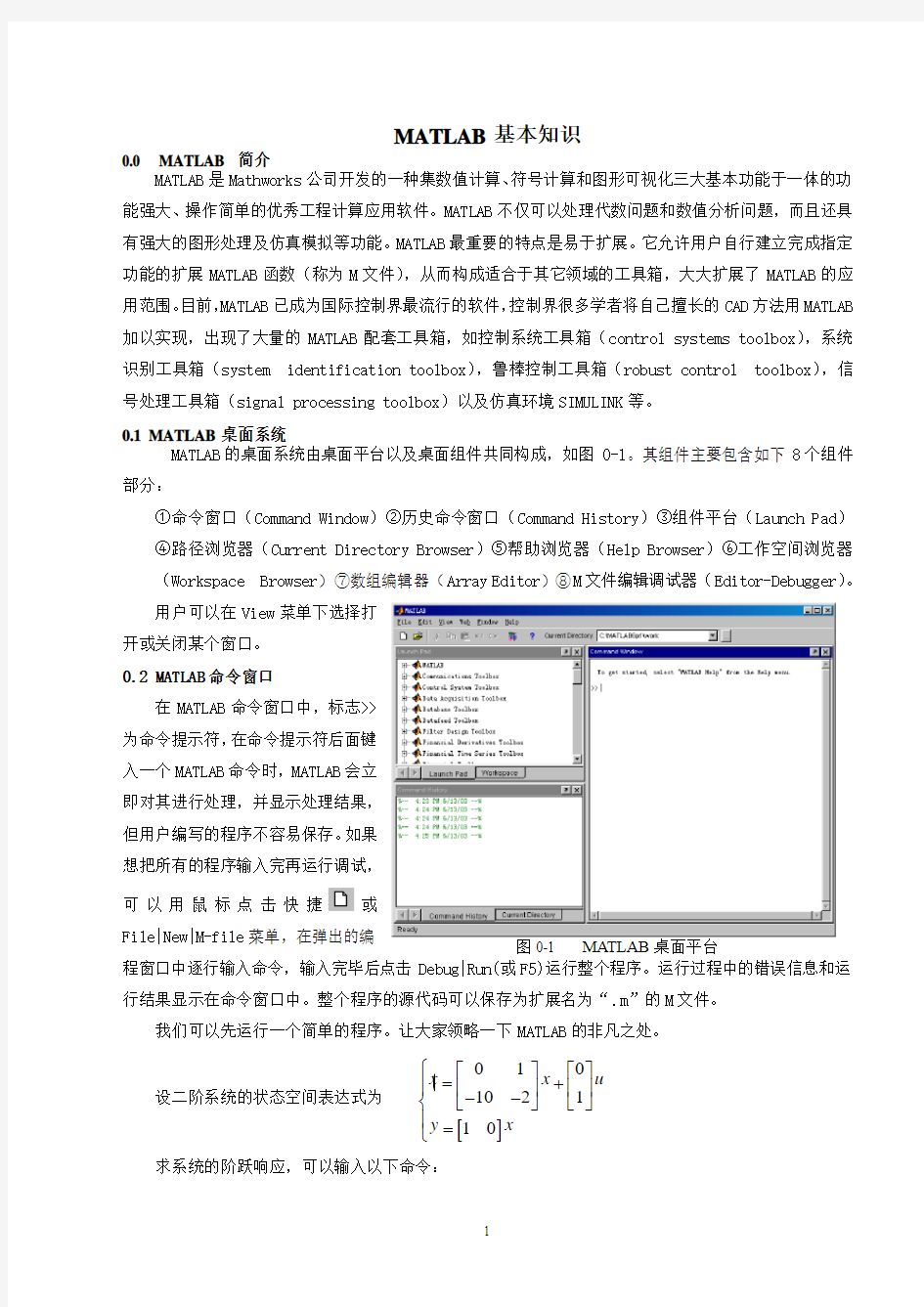
MATLAB 的桌面系统由桌面平台以及桌面组件共同构成,如图0-1。其组件主要包含如下8个组件部分:
①命令窗口(Command Window )②历史命令窗口(Command History )③组件平台(Launch Pad )④路径浏览器(Current Directory Browser )⑤帮助浏览器(Help Browser )⑥工作空间浏览器(Workspace Browser )⑦数组编辑器(Array Editor )⑧M 文件编辑调试器(Editor-Debugger )。 用户可以在View 菜单下选择打开或关闭某个窗口。 0.2 MATLAB 命令窗口
在MATLAB 命令窗口中,标志>>为命令提示符,在命令提示符后面键入一个MATLAB 命令时,MATLAB 会立即对其进行处理,并显示处理结果,但用户编写的程序不容易保存。如果想把所有的程序输入完再运行调试,可以用鼠标点击快
捷
或
File|New|M-file 菜单,在弹出的编
程窗口中逐行输入命令,输入完毕后点击Debug|Run(或F5)运行整个程序。运行过程中的错误信息和运行结果显示在命令窗口中。整个程序的源代码可以保存为扩展名为“.m ”的M 文件。
我们可以先运行一个简单的程序。让大家领略一下MATLAB 的非凡之处。
设二阶系统的状态空间表达式为 []010102110x x u
y x
?????=+?????--??????=?
求系统的阶跃响应,可以输入以下命令:
图0-1 MA TLAB 桌面平台
>>A=[0 1;-10 -2];B=[0;1];C=[1 0];D=0; %输入系数矩阵 step(A,B,C,D) %求阶跃响应
程序运行后会在一个新的窗口中显示出系统的时域动态响应曲线,如图0-2。用鼠标左键点击动态响应曲线的某一点,系统会提示其响应时间和幅值。按住左键在曲线上移动鼠标的位置可以很容易的根据幅值观察出上升时间、调节时间、峰值及峰值时间,进而求出超调量。
MATLAB 的语法规则类似于C 语言,变量名、函数名都与大小写有关,即变量A 和a 是两个完全不同的变量。应该注意所有的函数名均由小写字母构成。 0.3 MATLAB 基本操作命令
MATLAB 只有一种数据形式,那就是矩阵,或者数的矩形阵列。标量可看作为1×1的矩阵,向量可看作为n ×1或1×n 的矩阵。MATLAB 语言对矩阵的维数及类型没有限制,即用户无需定义变量的类型和维数,MATLAB 会自动获取所需的存储空间。
输入矩阵最便捷的方式为直接输入矩阵的元素,其定义如下: (1) 元素之间用空格或逗号间隔; (2) 用中括号([])把所有元素括起来; (3) 用分号(;)指定行结束。 例如,在MATLAB 的工作空间中,输入:
>> ]9654 3 2[a ;
则输出结果为:
图0-2 动态响应时域图
a 234
569
=
矩阵a 被一直保存在工作空间中,以供后面使用,直至修改它。
MATLAB 的矩阵输入方式很灵活,大矩阵可以分成n 行输入,用回车符代替分号或用续行符号(…)将元素续写到下一行。例如:
]987654321[a , , ; , , ; , , =
9]
8 7 6 5 4 3 2 1 [a = ]
987654321[a , , ; , , ; , , ?
??=
以上三种输入方式结果是相同的。一般若长语句超出一行,则换行前使用续行符号(…)。 MATAB 允许在函数调用时同时返回多个变量,而一个函数又可以由多种格式进行调用,语句的典型格式可表示为:
[返回变量列表]=函数名(输入变量列表)
例如用step()函数来求取系统的阶跃响应,可由下面的格式调用:
[y,t,x]=step(A,B,C,D)
其中变量A,B,C,D 表示系统四联矩阵,y 表示计算所得输出,t 为响应时间,x 为计算所得状态变量。 在MATLAB 中以“%”开始的程序行,表示注解和说明。符号“%”类似于C++中的“//”。这些注解和说明是不执行的。这就是说,在MATLAB 程序行中,出现“%”以后的一切内容都是可以忽略的。分号用来取消显示,如果语句最后一个符号是分号,则显示功能被取消,但是命令仍在执行,而结果不再在命令窗口或其它窗口中显示。这一点在M 文件中大量采用,以抑制不必要的信息显示。
MATLAB 提供了常用的算术运算符:+,-,*,∕(﹨),^(幂指数)。
应该注意:(∕)右除法和(﹨)左除法这两种符号对数值操作时,其结果相同,其斜线下为分母,如1∕4与4﹨1,其结果均为0.25,但对矩阵操作时,左、右除法是有区别的。方程AX=B 的解用左除,即X=A\B=A -1
B ;而方程XA=B 的解用右除,即X=B/A=BA -1
,实际中,这类方程不多用。
当调用了一个产生图形的函数时,MATLAB 会自动建立一个图形窗口。这个窗口还可分裂成多个窗口,并可在它们之间选择,这样在一个屏上可显示多个图形。
图形窗口中的图形可通过打印机打印出来。若想将图形导出并保存,可用鼠标点击菜单File|Export,导出格式可选emp 、bmp 、jpg 等。命令窗口的内容也可由打印机打印出来:如果事先选择了一些内容,则可打印出所选择的内容;如果没有选择内容,则可打印出整个工作空间的内容。
实验1 系统的传递函数阵和状态空间表达式的转换
1.0 实验设备
PC 计算机1台(要求P4-1.8G 以上),MA TLAB6.X 软件1套。 1.1实验目的
①学习多变量系统状态空间表达式的建立方法、了解统状态空间表达式与传递函数相互转换的方法;
②通过设计编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。 1.2实验原理说明
设系统的模型如式(1.1)示。
n r m x Ax Bu
x R u R y R y Cx D
=+?∈∈∈?
=+? (1.1)
其中A 为n ×n 维系统矩阵、B 为n ×r 维输入矩阵,C 为m ×n 维输出矩阵,D 为传递阵,一般情况下为0。系统的传递函数阵和状态空间表达式之间的关系如式(1.2)示。
1()
()()()
num s W s C SI A B D den s -=
=-+ (1.2)
式(1.2)中,)(s num 表示传递函数阵的分子阵,其维数是m ×r ;)(s den 表示传递函数阵的按s 降幂排列
的分母。 1.3实验步骤
① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关
系如式(1.2),采用MATLAB 的file.m 编程。 注意:ss2tf 和tf2ss 是互为逆转换的指令; ② 在MATLAB 界面下调试程序,并检查是否运行正确。
③ [例1.1] 已知SISO 系统的状态空间表达式为(1.3),求系统的传递函数。
,631234100010321321u x x x x x x ????
??????-+????????????????????---=?????????? []????
??????=321001x x x y (1.3)
程序:
%首先给系数矩阵A 、B 、C 阵赋值; A=[0 1 0;0 0 1;-4 -3 -2]; B=[1;3;-6]; C=[1 0 0]; D=0;
%创建SS 对象,即状态空间模型(State Space ) Gss=ss(A,B,C,D);
%将状态空间表达式转换为传递函数(Transfer Function ),命令为tf W=tf(Gss)
%求传递函数的分子分母按降幂排列的多项式系数的格式为[num,den]=ss2tf(a,b,c,d,u) [num,den]=ss2tf(A,B,C,D,1)
程序运行结果: Transfer function:
s^2 + 5 s + 3 --------------------- s^3 + 2 s^2 + 3 s + 4
num =
0 1.0000 5.0000 3.0000
den =
1.0000
2.0000
3.0000
4.0000 从程序运行结果得到:系统的传递函数为:
232
53
()234
s s W S s s s ++=+++…………………… .. (1.4) ④ [例1.2] 从系统的传递函数(1.4)式求状态空间表达式。 程序:
num =[0 1 5 3]; %在给num 赋值时,在系数前补0,使num 和den 赋值的个数相同; den =[1 2 3 4];
[A,B,C,D]=tf2ss(num,den)
程序运行结果: A =
-2 -3 -4 1 0 0 0 1 0 B =
1 0 0 C =
1 5 3 D =
由于一个系统的状态空间表达式并不唯一, [例1.2]程序运行结果虽然不等于式(1.3)中的A 、B 、C 阵,但该结果与式(1.3)是代数等效的。不防对上述结果进行验证。
⑤ [例1.3] 对上述结果进行验证编程 %将[例1.2]上述结果赋值给A 、B 、C 、D 阵; A =[-2 -3 -4;1 0 0; 0 1 0]; B =[1;0;0]; C =[1 5 3]; D=0;
Gss=ss(A,B,C,D); %创建SS 对象,即状态空间模型(State Space ) %将状态空间表达式转换为传递函数(Transfer Function ),命令为tf W=tf(Gss)
%求传递函数的分子分母按降幂排列的多项式系数的格式为[num,den]=ss2tf(a,b,c,d,u) [num,den]=ss2tf(A ,B ,C ,D,1)
程序运行结果与[例1.1]完全相同。 1.4 实验要求
在运行以上[例]程序的基础上,应用MATLAB 对(1.5)系统仿照[例1.2]自行设计程序,求系统的A 、B 、C 、阵;然后再仿照[例1.3]进行验证。并写出实验报告。
4
32352)(2
32+++?
??
???+++=s s s s s s S G (1.5) 提示:num =[0 0 1 2;0 1 5 3];
传递函数转换为状态空间表达式的程序:
程序运行结果:
状态空间表达式转换为传递函数验证程序:
验证结果:
实验2 多变量系统的能控、能观分析
2.0 实验设备
PC 计算机1台(要求P4-1.8G 以上),MA TLAB6.X 软件1套。 2.1 实验目的
①学习多变量系统状态能控性分析的定义及判别方法; ②学习多变量系统状态能观性分析的定义及判别方法;
③通过用MATLAB 编程、上机调试,掌握多变量系统能控性及能观性判别方法。 2.2 实验原理说明
①设系统的状态空间表达式
n r m x Ax Bu
x R u R y R y Cx D
=+?∈∈∈?
=+? (2.1)
②系统的能控分析是多变量系统设计的基础,状态能控性判别分为秩判别法和约旦标准型判别法,后者是针对系统的系数阵A 是对角标准形或约旦标准形的系统,状态能控性判别时不用计算,应用公式直接判断,是一种直接简易法;前者是状态能控性判别应用最广泛的一种方法。状态能控性判别式为:
1n RankM Rank B
AB
A B n -??==?? (2.2)
③系统的能观分析是多变量系统设计的基础,状态能观性判别分为秩判别法和约旦标准型判别法,后者是针对系统的系数阵A 是对角标准形或约旦标准形的系统,状态能观性判别时不用计算,应用公式直接判断,是一种直接简易法;前者是状态能观性判别应用最广泛的一种方法。
状态能控性判别式为:
()
1
T
n T T T
T
T
RankN Rank C A C
A C n -??==???
?
(2.3)
2.3 实验步骤
① 先调试[例2.1]、[例2.2]系统能控性、能观性程序,然后根据所给系统的系数阵A 和输入阵B ,
依据2.2能控性判别式,及系统所给系数矩阵A 和输出矩阵C ,依据2.3能观性判别式,对所给系统采用MATLAB 的file.m 编程;在MATLAB 界面下调试程序,并检查是否运行正确。 ② 按实验要求,设计程序判断所给的具有两个输入的四阶系统的能控性,能观性。
[例2.1]:已知系数阵A 和输入阵B 分别如下,判断系统的状态能控性
6.666710.66670.3333101012A --??
??=??
????, ????
??????=110B
程序:
A =[ 6.6667 -10.6667 -0.3333 1 0 1
0 1 2]; B=[0; 1; 1]; m1=B;
m2=A*B; %将AB 的结果放在m2中 m3=A^2*B; %将A 2B 的结果放在m3中,
M=[m1 m2 m3] %将能控矩阵M 显示在MA TLAB 的窗口
n=rank(M) %能控矩阵M 的秩放在n 程序运行结果: M =
0 -11.0000 -85.0003 1.0000 1.0000 -8.0000 1.0000 3.0000 7.0000 n = 3
从程序运行结果可知,能控矩阵M 的秩为3 = n ,所以系统是状态能控性的。
[例2.2]:已知系数阵A 和输入阵C 分别如下,判断系统的状态能观性。
6.666710.66670.3333101012A --??
??=??
????
, []201=C
程序:
A =[ 6.6667 -10.6667 -0.3333 1 0 1
0 1 2]; C=[1 0 2]; n1=C;
n2=C*A; %将CA 的结果放在n2中 n3=C*A^2; %将CA 2的结果放在n3中,
N=[n1; n2; n3] %将能观矩阵N 显示在MA TLAB 的窗口
n=rank(N) %能观矩阵N 的秩放在n
程序运行结果: N =
1.0000 0
2.0000 6.6667 -8.6667
3.6667 35.7782 -67.4450 -3.5553 n =3
从程序运行结果可知,能控矩阵N 的秩为3=n ,由式(2.3)可知,系统是状态完全能观性的。
2.4 实验要求
①在运行以上[例]程序的基础上,编程判别下面系统的能控性,能观性。
??
???????
???=10
10
121101100203A ?????
?
??????=01100010
B []0101=
C ② 要求调试自编程序,并写出实验报告。 能控性判别的程序:
运行结果:
结论:
能观性判别的程序:
运行结果:
结论:
实验3 系统设计:状态观测器的设计及其响应
3.0 实验设备
PC 计算机1台(要求P4-1.8G 以上)、MA TLAB6.X 软件1套。 3.1 实验目的
①学习状态观测器的设计方法。
②通过用MA TLAB 编程、上机调试,掌握状态观测器的设计方法及其响应。 3.2 实验原理说明
设系统的模型如式(3.1)示。
n r m x Ax Bu
x R u R y R y Cx D
=+?∈∈∈?
=+? (3.1)
系统状态观测器包括全维观测器和降维观测器。设计全维状态观测器的条件是系统状态完全能观。全维
状态观测器的方程为:
()x A GC x Gy Bu =-++ (3.2)
3.3 实验步骤
①在MATLA 界面下调试[例3.1]程序,并检查是否运行正确。
②已知三节系数阵A 、B 、和C 阵分别如式(3.4)示,设计全阶状态观测器,要求状态观测器的极点为[-1 -2 -3]上 [例3.1]:
??
????--=1210A , ??????=10B , []01=C (3.3) (1)试设计一个状态观测器,使其极点为-5,-2,并验证此解。
(2)令()10,(0),001u x x ??
===????
,试对原系统和观测器进行仿真,比较两者波形。
(3)令()1,(0)0,00u x x ===,试对原系统和观测器进行仿真,比较两者波形。 首先验证系统是状态完全能观的,根据题义编程: (1)用MATLAB 设计状态观测器反馈阵G A=[0 1;-2 -1]; B=[0;1]; C=[1 0]; D=0;
N=obsv(A,C); %创建能观性矩阵 rank(N) %判断能观性 运行结果:ans = 2
系统能观,可以设计全维状态观测器。
A=[0 1;-2 -1];
C=[1 0]; D=0;
P=[-5 -2]; %输入希望极点 G=place(A',C',P)' %求观测器反馈矩阵 Ao=A-G*C %创建观测器的系统矩阵 eig(Ao) %验证极点 程序运行结果: G =
6.0000 2.0000
Ao =
-6.0000 1.0000 -4.0000 -1.0000
ans =
-5.0000 -2.0000
所以,状态观测器的方程为
6160()4121x A GC x Gy Bu x y u -??????
=-++=++??????
--??????
(2)对原系统和观测器进行仿真
x0=[1 ;1]; %输入初始条件 t=0:0.01:10; %给出时间数组 u=0*t; %设定零输入信号 Gss=ss(A,B,C,D); %创建原系统ss 对象 [y,t,x]=lsim(Gss,u,t,x0); %求系统时域响应并返回变量 Goss=ss(Ao,G,C,D); %创建观测器的ss 对象,G 代替B [yc,t,xc]=lsim(Goss,y,t); %求观测器的时域响应 plot(t,yc,t,y,'--'),figure,plot(t,xc,t,x,'--') %求响应曲线,比较波形
图3-2状态响应比较
(3)求零状态响应
t=0:0.01:20; %给出时间数组 u=1+0*t; %产生阶跃输入信号 Giss=ss(Ao,B,C,D); %创建分解系统1观测器模型 [y,t,x]=lsim(Gss,u,t); %求原系统时阶跃响应 [yi,t,xi]=lsim(Giss,u,t); %求分解系统1对u 的响应 [yo,t,xo]=lsim(Goss,y,t); %求分解系统2对y 的响应 plot(t,x),figure,plot(t,xi),figure,plot(t,xo) %求原系统响应和观测器分解响应 figure,plot(t,xi+xo,'--') %叠加分解图画出观测器的响应 运行结果
图3-1输出响应比较
图3-4分解系统1对u 的响应
图3-3原系统阶跃响应
3.4 实验要求
2 2.50.5100010A ---????=?????? 100B ??
??=??
????
[]14
3.5
C = (3.4) (1)试设计一个状态观测器,使其极点为-3,-5,-7,并验证此解。
(2)令()10,(0)0.75,000.4u x x ????==-=??????
,试对原系统和观测器进行仿真,比较两者波形。 (3)令()1,(0)0,00u x x ===,试对原系统和观测器进行仿真,比较两者波形。要求写出实验报告。
(1)设计状态观测器反馈阵G 的程序:
运行结果:
图3-5分解系统2对y 的响应
图3-6叠加分解图画出观测器响应
(2)对原系统和观测器进行仿真的程序:运行结果:
(3)求零状态响应的程序:
运行结果:
实验四 多变量解耦控制
4.0 实验设备
PC 计算机1台(要求P4-1.8G 以上)、MATLAB6.X 软件1套。 4.1 实验目的
①学习多变量解耦控制方法。
②通过用MATLAB 编程、上机调试,掌握多变量解耦控制的仿真方法,直观认识解耦控制的效果。 4.2 实验原理说明
解耦问题是多输入-多输出系统综合理论中的重要组成部分。其设计目的是寻求适当的控制规律,使输入输出相互关联的多变量系统实现每一个输出仅受相应的一个输入所控制,每一个输入也仅能控制相应的一个输出。
前馈补偿器解耦是频域方法,就是在原反馈系统的前向通道中串连一个补偿器,希望得到串接补偿器后的传递函数阵
()()()o d W s W s W s = (4.1)
为对角阵。
式中 W o (s)——待解耦系统的传递函数阵 W d (s)——前馈补偿器的传递函数阵 W(s)——串接补偿器后的系统传递函数阵 4.3 实验步骤 ①了解Simulink
Simulink 是由Math Works 软件公司1990年为MATLAB 提供的用图形表示控制系统模型的仿真工具。它具有两个显著的功能:Simul(仿真)与Link(连接),亦即可以利用鼠标在模型窗口上“画”出所需的控制系统模型。然后利用Simulink 提供的功能来对系统进行仿真或线性化分析。与MATLAB 中逐行输入命令相比,这样输入更容易,分析更直观。下面简单介绍Simulink 建立系统模型的基本步骤:
(1) SIMULINK 的启动:在MATLAB
命令窗口的工具栏中单击按钮或者在命令提示符>>下键入
simulink 命令,回车后即可启动Simulink 程序。启动后软件自动打开Simullink 模型库窗口,如图4-1所示。这一模型库中含有许多子模型库,如Sources(输入源模块库)、Sinks(输出显示模块库)、Nonlinear(非线性环节)等。若想建立一个控制系统结构框图,则应该选择File| New 菜单中的Model 选项,或选择工具栏上
按钮,打开一个空
白的模型编辑窗口如图4-2所示。
(2) 画出系统的各个模块:打开相应的子模块库, (3) 选择所需要的元素,用鼠标左键点中后拖到模
型编辑窗口的合适位置。
(3) 给出各个模块参数:由于选中的各个模块只包
含默认的模型参数,如默认的传递函数模型为1/(s+1)的简单格式,必须通过修改得到实际的模块参数。要修改模块的参数,可以用鼠标双击该模块图标,则会出现一个相应对话框,提示用户修改模块参数。
(4) 画出连接线:当所有的模块都画出来之后,可以再画出模块间所需要的连线,构成完整的系统。模
块间连线的画法很简单,只需要用鼠标点按起始模块的输出端(三角符号),再拖动鼠标,到终止模块的输入端释放鼠标键,系统会自动地在两个模块间画出带箭头的连线。若需要从连线中引出节点,可在鼠标点击起始节点时按住Ctrl 键,再将鼠标拖动到目的模块。
(5) 指定输入和输出端子:在Simulink 下允许有两类输入输出信号,第一类是仿真信号,可从source(输
入源模块库)图标中取出相应的输入信号端子,从Sink(输出显示模块库)图标中取出相应输出端子即可。第二类是要提取系统线性模型,则需打开Connection(连接模块库)图标,从中选取相应的输入输出端子。
例4.1 典型二阶系统的结构图如图7-9所示。用Simulink 对系统进行仿真分析。
图4-1 simulink 模型库
图4-2 模型编辑窗口
图4-3 典型二阶系统结构图
按前面步骤,启动simulink并打开一个空白的模型编辑窗口。
(1)画出所需模块,并给出正确的参数:
●在sources子模块库中选中阶跃输入(step)图标,将其拖入编辑窗口,并用鼠标左键双击该
图标,打开参数设定的对话框,将参数step time(阶跃时刻)设为0。
●在Math(数学)子模块库中选中加法器(sum)图标,拖到编辑窗口中,并双击该图标将参数List
of signs(符号列表)设为|+-(表示输入为正,反馈为负)。
●在continuous(连续)子模块库中、选积分器(Integrator)和传递函数(Transfer Fcn)图标
拖到编辑窗口中,并将传递函数分子(Numerator)改为〔900〕,分母(Denominator)改为〔1,9〕。
●在sinks(输出)子模块库中选择scope(示波器)和Out1(输出端口模块)图标并将之拖到编辑窗
口中。
(3)将画出的所有模块按图4-3用鼠标连接起来,构成一个原系统的框图描述如图4-4所示。
(4)选择仿真算法和仿真控制参数,启动仿真过程。
图4-4二阶系统的simulink实现
●在编辑窗口中点击Simulation|Simulation parameters菜单,会出现一个参数对话框,在solver
模板中设置响应的仿真范围StartTime(开始时间)和StopTime(终止时间),仿真步长范围Maxinum step size(最大步长)和Mininum step size(最小步长)。对于本例,StopTime可设置为2。最后点击Simulation|Start菜单或点击相应的热键启动仿真。双击示波器,在弹出的图形上会“实时地”
显示出仿真结果。输出结果如图4-5所示。
在命令窗口中键入whos命令,会发现工作空间中增加了两个变量――tout和yout,这是因为Simulink中的Out1 模块自动将结果写到了MATLAB的工作空间中。利用MATLAB命令plot(tout,yout),可将结果绘制出来,如图4-6所示。比较4-5和4-6,可以发现这两种输出结果是完全一致的。
②已知系统的传递函数为
()110.11
0.11200.21o s s W s s ??
??
++=?
?????+??
采用Simulink 仿真,画出Simulink 仿真图,分别设置双输入,只有u 1输入和只有u 2输入,检测耦合影响。当两个输入都为阶跃输入时,记录仿真结果;当分别设置其中一路输入为零,记录仿真结果。通过波形比较,写出得出的结论。 画出系统结构图或Simulink 仿真图:
记录两个输入都为阶跃输入时的响应曲线:
记录分别设置其中一路输入为零,另一路输入为阶跃输入时的响应曲线:
图4-5仿真结果示波器显示
图4-6 MATLAB 命令得出的系统响应曲线
③若采用前馈补偿解耦的方法实现解耦控制,设希望的开环传递函数阵为对角形,即
()10
0.11
200.21s W s s ??
??+=?
?????+?
?
画出相应的解耦系统图,根据解耦系统图画出Simulink 仿真图,记录双输入时和分别有一路输入为零时的响应曲线。
解耦系统图或Simulink 仿真图:
记录双输入时和分别有一路输入为零时的响应曲线: