谐波减速器原理及特点
谐波减速器原理及特点
1. 概述
1.1 产生及发展
谐波齿轮传动技术是20世纪50年代末随着航天技术发展而发明的一种具有重大突破的新型传动技术,由美国人C. W.马瑟砖1955年提出专利,1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的,以后逐渐扩展到民用和一般机械上。这种传动较一般的齿轮传动具有运动精度高,回差小,传动比大,重量轻,体积小,承载能力大,并能在密闭空间和辐射介质的工况下正常工作等优点,因此美,俄,日等技术先进国家,对这方面地研制工作一直都很重视。如美国就有国家航空管理局路易斯研究中心,空间技术试验室,USM公司,贝尔航空空间公司,麻省理工学院,通用电器公司等几十个大型公司和研究中心都从事过这方面的研究工作。前苏联从60年代初期开始,也大力开展这方面的研制工作,如苏联机械研究所,莫斯科褒曼工业大学,列宁格勒光学精密机械研究所,全苏联减速器研究所等都大力开展谐波传动的研究工作。他们对该领域进行了较系统,较深入的基础理论和试验研究,在谐波传动的类型,结构,应用等方面有较大的发展。日本长谷齿轮株式会社等有关企业在谐波齿轮传动的研制和标准化、系列化等方面作出了很大贡献。西欧一些国家除了在卫星,机器人,数控机床等领域采用谐波齿轮传动外,对谐波传动的基础理论也开始进行系统的研究。谐波齿轮传动技术1970年引入日本,随之诞生了日本第一家整体运动控制的领军企业-日本Harmonic Drive SystemsInc.(简称HDSI)。目前日本HDSI公司是国际领先的谐波减速器公司,其生产的Harmonic Drive谐波减速器,具有轻量、小型、传动效率高、减速范围广、精度高等特点,被广泛应用于各种传动系统中。
谐波传动技术于1961年由上海纺织科学研究院的孙伟工程师介绍入我国。此后,我国也积极引进并研究发展该项技术,1983年成立了谐波传动研究室,1984年“谐波减速器标准系列产品”在北京通过鉴定,1993年制定了
GB/T14118-1993谐波传动减速器标准,并在理论研究、试制和应用方面取得较
大成绩,成为掌握该项技术的国家之一。到目前为止,我国己有北京谐波传动技术研究所、北京中技克美有限责任公司、燕山大学、郑州机械研究所、北方精密机械研究所、贵州群建齿轮有限公司等单位从事这方面的研究和生产,为我国谐波传动技术的研究和推广应用开展了深入的研究和试验工作。
1.2 传动原理
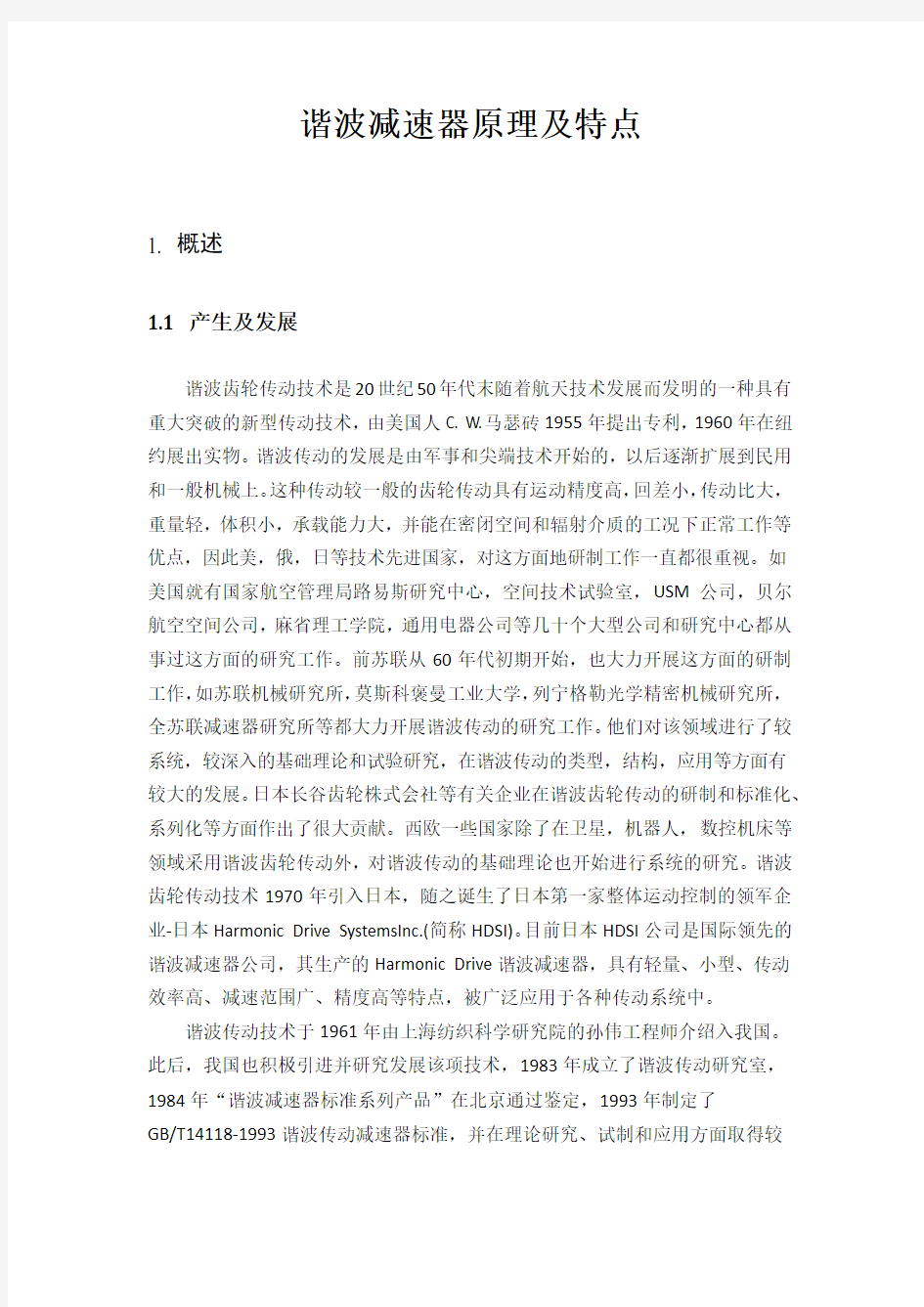
谐波传动减速器英文名称:harmonic gear drive,主要由波发生器、柔性齿轮和刚性齿轮三个基本构件组成,如图1-1所示。波发生器是一个凸轮部件,其两端与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。
图1-1 谐波齿轮减速器组成
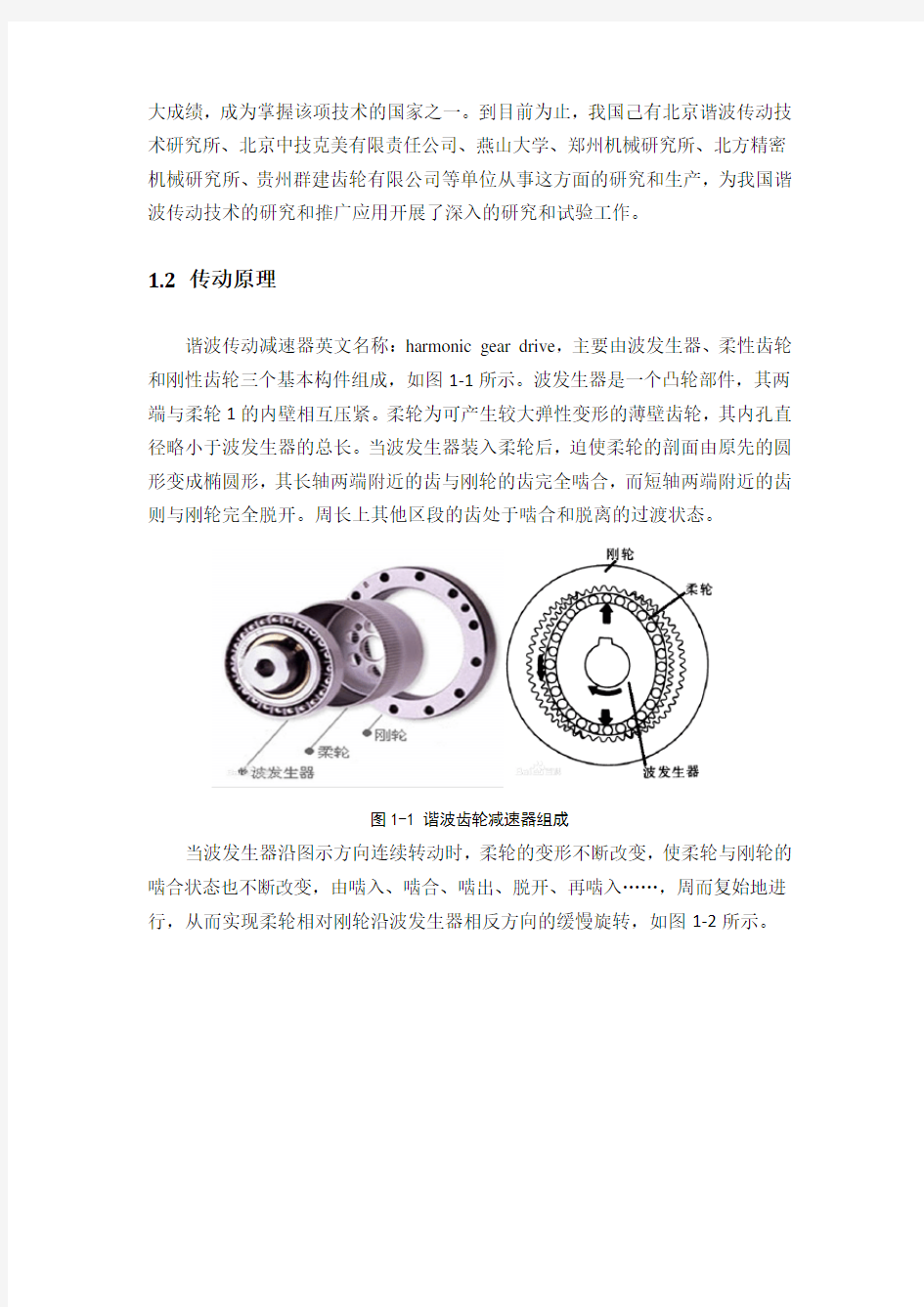
当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器相反方向的缓慢旋转,如图1-2所示。
图1-2 谐波齿轮啮合简图
在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。
谐波传动减速器柔轮和刚轮的齿距相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即:
Z2-Z1=n(1-1)式中:Z2、Z1--分别为刚轮与柔轮的齿数。
其传动比为:
刚轮固定柔轮输出(1-2)
柔轮固定刚轮输出(1-3)双波传动中,Z2-Z1=2,柔轮齿数很多。上式负号表示柔轮的转向与波发生器的转向相反。由此可看出,谐波减速器可获得很大的传动比。
1.3 传动特点
主要优点:
(1)传动速比大。单级谐波齿轮传动速比范围为70~320,在某些装置中可达到1000,多级传动速比可达30000以上。它不仅可用于减速,也可用于增速的场合。