电制动器制动力的计算方法
电制动器制动力的计算
SAE 1999-01-0482
摘要:
Continental Teves (欧洲ITT汽车公司的前身) 和Darmstadt 工业大学正联合开发一种不需要以制动力、制动转矩作为反馈低成本电制动系统的控制策略。然而,由于机电化制动系统中齿轮效率变化范围很大,致使这项工作非常棘手。
这篇文章首先描述了Continental Teves公司的第三代制动器的装置和运行,他们仍然使用了一个集成的制动力传感器,并介绍了Darmstadt工业大学的开发环境,包括一个制动器测试台、一个复杂的制动器模型和一个简化的制动器模型。并对可从制动器上获取的两个信号——电机转子位置和电机电流作了仔细分析,就可能应用的制动力算法讨论了其利弊。
基于制动器的简化模型和信号分析,介绍了只从转子位置和电机电流角度对制动力进行优化的算法。为了能在不同力传感器下调整间隙,我们研究了一种检测制动片和制动盘接触点的算法。
第一个制动力计算和间隙处理的实验结果也在文章中作了介绍。
介绍:
现在登记注册装有ABS、TCS、EPS等现代电子控制系统的汽车数量在不断增多。然而,要在普通的液力制动系统中融入这些功能,却需要大量的电液元件。近年来,汽车工业界和许多生产厂家都因此而在开发电制动系统。目前,有两种构想广为接受,一种是电液系统,另一种是纯机电系统,电液系统仍然使用了制动液和常规的制动器,但引用了一些比例阀。据预测,这种系统将在市场上作为首选。
然而,随着电液制动系统(制动液、制动电路、比例阀等)弊端的出现,纯机电制动系统就成为一种很有前景的构想,而且值得去深入研究。
这项工作的重心就在于在车辆制动器上实现产生制动力的纯机电系统。
图1
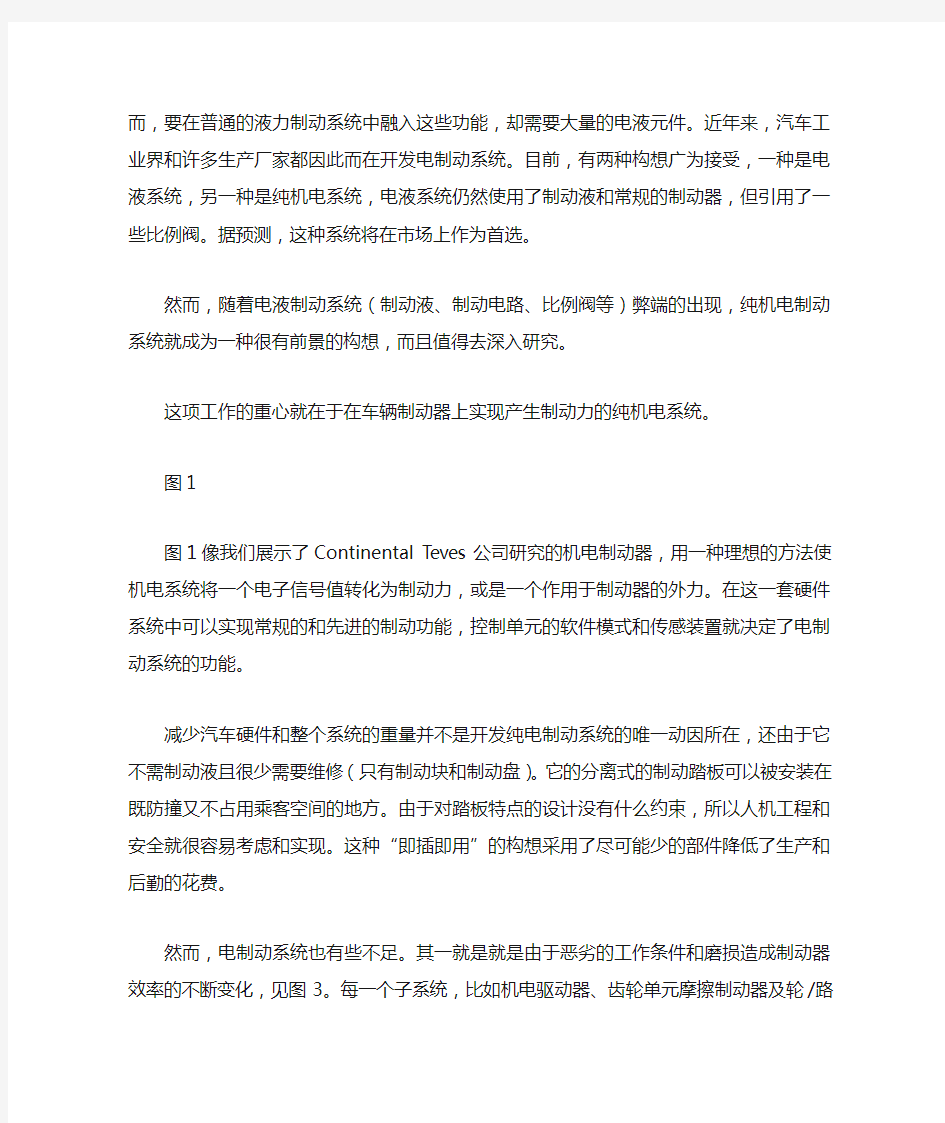
图1像我们展示了Continental Teves公司研究的机电制动器,用一种理想的方法使机电系统将一个电子信号值转化为制动力,或是一个作用于制动器的外力。在这一套硬件系统中可以实现常规的和先进的制动功能,控制单元的软件模式和传感装置就决定了电制动系统的功能。
减少汽车硬件和整个系统的重量并不是开发纯电制动系统的唯一动因所在,还由于它不需制动液且很少需要维修(只有制动块和制动盘)。它的分离式的制动踏板可以被安装在既防撞又不占用乘客空间的地方。由于对踏板特点的设计没有什么约束,所以人机工程和安全就很容易考虑和实现。这种“即插即用”的构想采用了尽可能少的部件降低了生产和后勤的花费。
然而,电制动系统也有些不足。其一就是就是由于恶劣的工作条件和磨损造成制动器效率的不断变化,见图3。每一个子系统,比如机电驱动器、齿轮单元摩擦制动器及轮/路/车系统传输的特性参数变化范围都很大。因此,一个独立的车轮制动器必须在一个闭环控制系统下工作。对盘式制动器来说,一个很明显的需要控制的参数就是制动力[参阅参考文献[8]。然而一个力传感器是很难集成到电制动系统中的,价格昂贵且需要独立标度。
这篇文章对所用的社机电驱动制动器介绍了一种新颖的构想,一种不太传统的方法——不采用力传感器。为了这一目的,首先讨论了在已经可以实现的量,分别建立了一个复杂的和简化的制动器模型。基于简化模型和信号分析,我们想出了一种仅从电机电流和转子位置来计算制动机构效率的方法。计算得到的效率可用于调整制动机构模型。通过调整好的制动模型,就可以算出制动力。
为了在不使用力传感器条件下检测和调整空间间隙,引入了一种基于电机信号的方法。
模拟结果和首次试验结果表明了这些方法的应用潜力。
开发环境:
开发过程中的一个主要问题就是创造一个使灵活快速算法得以实现的环境。以下的三套环境皆为开发制动力算法和计算处理所建:
. 拥有配置了单轮模型的可加热制动盘的测试台
.复杂的机电制动盘模型
.简化的机电制动盘模型
车轮模块——一个由一个配有伺服放大器的机电制动器和微控制单元组成的车轮模型,见图2。
为了使用适于大批量生产的零部件,采用一个16位微控制器作为数控计算的控制平台。微控制器对制动力和位置进行控制、处理间隙并对负责车轮模块的信号传输和监控。
为了驱动车轮制动器的无刷电机,采用一个结构紧凑功能强大的伺服放大器。他对分解器所提供的电机转子位置进行处理,以实现电子信息的传输。另外,伺服放大器还有两个模拟控制器,一个电机电流控制器和一个转子转速控制器。
由机电转换器、齿轮、摩擦制动片及传感器所组成的“智能化盘式制动器”的设计重量轻、结构紧凑的思路下完成的。基于可靠已成功应用的FN制动片,Continental Teves 公司开发了一种结构非常紧凑的电制动器,参考文献1给出了Continental Teves的第二代制动驱动器。见图4给出的是配有附加行星齿轮、制动力传感器及其他调整装置的第三代制动驱动器。
推动内部制动块的不再是活塞,而是主轴。行星转子齿轮的螺帽是由无刷转矩电机通过行星齿轮驱动的。通过把伺服电机的线圈直接嵌入制动器壳内并只用一个中心轴承支撑齿轮单元,就使结构紧凑成为了可能。然而,中心轴承就同时受到径向和轴向力。分解器用以测量转子的位置以传输电信号。
为了对当前Continental Teves公司机电制动器进行制动过程控制和对制动力的变化进行计算,Darmstadt 工业大学开发了一种集成于主轴的力传感器,如图5所示。主轴为传感器的安装提供了很好的条件,它承受了所有的制动力,保护了传感器不受外界恶劣环境影响,并使之在制动过程中不发生转动。
为了估算开发的主轴力传感器的性能,我们将另外一个制动力传感器(装在外部制动片和制动块之间)的输出信号与主轴力传感器的输出作了对比。制动盘在工作过程中可能会加热到不同的温度,而外部的制动力传感器则为了避免高温疲劳而采用水冷处理,图6就向我们展示了传感器的测试结果,对角线状的曲线显示了内部制动力传感器所测的制动力的变化,较低的一组曲线就显示了不同温度下的相对误差。由图可知相对误差非常小,而且没有出现高温疲劳。℃测试台——制动器测试台如图7所示,他是为了达到开发与测试灵活计算的目的而建的。在这个软件中绝大多数变化可以实现与测试,而不需要真车驱动测
试。在图7 的右侧,用一个原有的轮轴来支撑制动盘和机电制动器○
1,制动力传感器信号由一个频率运载放大器采集处理。制动盘上装有五个加热线圈和一个温度传感器。通过加热器控制单元,制动盘能被加热到800℃,这样,就可以模拟参数变化并对机电制动器传输特性的影响进行研究。
图7,制动盘可加热的机电盘式制动器测试台
用一个配有Transputer 数据采集台的486芯片作为在线测量系统。从一个非常友好的用户控制界面可以看到12个模拟信号输入通道和4个模拟信号输出通道,并以2KH 的频率进行采样。桌面采用MATLAB 编写,以确保在制动器模拟
环境下数据便于携带。采用一个可测量相位的电流测量仪○
6测量电机及电池的相位电流。微控制器及伺服放大器装在一个盒中。
第二个PC 是用RS232接口下载和调整在RAM 和EEPROM 的算法。
复杂的制动器模型——参考文献1中给出了Continental Teves 公司的第二代机电制动器。根据模块设计,这一模型很容易改进到第三代。新的参数是分开设计下零件厂商在不同测试台上进行测量确定的。模型是在PC 奔腾Pro200机上用MATLAB/SIMULINK 模块中实现的,见图8。
图8 盘式制动器模型的SIMULINK 模块图
微控制器模块包含了力和唯一传感器,二者具有一定的比例关系,他们的参数可以直接由微控制器软件获取。
在模拟控制块中,考虑了伺服放大器的速度和电流控制器。速度控制器是一个PI 控制器,而电流控制器是一个串接的第一级滞后元件。它们在外环与速度控制器串接,见参考文献[1].
图8模块结构图中下一个模块是电机。为了简化,数据无刷电机可建模为一个标准的数控电机,其输出扭矩Tm 是和电机电流Im 成正比的:
ψ?=Im Tm
为了确认电机参数,我们建了一个测试台,让电机以任意选择的扭矩运行。通过电机在不同扭矩下运行及测量电机电流Im ,就可以由曲线斜率测出磁通量ψ。
单独的制动器元件的转动惯量和质量可以由CAD 程序测出。比如,为了得出电机子系统的转动惯量,电机的分离器、轴承球及转子的转动惯量都得加上。
如图9,行星齿轮可建模为两个串接得齿轮单元。第一个齿轮单元是中心轮单元,第二个是行星架单元。每个支承单元都得考虑支承摩擦FB1T 和FB2T 及由齿
牙摩擦FT T 。每一个齿轮单元的刚度和阻尼都以G C 和G d 表示。为了计算惯性和摩擦损失,要特别注意各元件之间的速度比,在元件供应商的帮助下,所有的参数都可以测量出来。图10 描述了一个齿轮单元的双质量模型。
一项最富挑战性的工作就是PRG (行星滚动轮子系统)的设计。PRG 可建模成一个支承件,由于其螺帽-转子及芯轴-转子接触而具有摩擦的双质量振子。由于行星滚动轮的线面接触线与螺帽-转子及芯轴-转子一样,其角接触的轮廓和角接触球轴承相同,因此,模型的摩擦损失可由参考文献[11]中提供的轴承模型解出.最重的PRG 子系统应包括以下几部分(见图11):
? 螺帽、主轴、滚子的刚度(综合考虑为一个刚度和一个阻尼)
? PRG 轴向附加载荷FR T 所产生的库仑摩擦
? PRG 的死区
?
螺帽的转动惯量R θ、转子的转动惯量ωθ、滚子的转动惯量K θ及主轴质量S m 和振子质量ωm (综合考虑为一个质量和一个转动惯量)
图11 行星滚动轮
图12 摩擦制动的模型
如图12,在摩擦制动器子系统中,制动片的静态及动态行为、制动块及制
动盘都建立了模型。制动片刚度由一个特别设计的测量单元决定。采用了一台通用机器对串接放松的新制动片进行随机测量。
两种必须区分的摩擦制动器工作状态
?制动块未接触制动盘→间隙(空间间隙)必须考虑在内(AG x >0)
?
制动块接触到制动盘→无间隙(AG x =0) 对任一状态,质量B m 、转化摩擦力FB F 、刚度B C 及阻尼B d 必须单独计算。根据间隙AG x 值,模型在两种状态之间变换。
图13 复杂制动器模型的图形用户界面
一个用以测量中间轴承系统参数的轴承测试台可以在不同的轴向力和转速
下测量摩擦力矩。通过一个很简单的图形用户界面,就可以实现人工信号激励和测量的仿真。界面可以容许改变仿真参数和集成方法。外部和内部模型信号可以选择显示。图13描绘了图形用户界面的窗口桌面。
图14 简化制动器模型的模块图
简化制动器模型——作为开发制动力计算方法的基础,建立了如图14的简
化制动器模型。
为了简化制动器模型,我们将不同的物理参数结合起来。tot θ考虑了所有转
换的加速质量和转动惯量。参数tot d 包括了各个制动器元件的粘滞摩擦力矩。参数tot γ考虑了所有的附加载荷,齿数比tot v 综合考虑了串接的行星齿轮齿数比和行星滚动轮的齿数比。
use F V F m T T T T ---=。。C tot ?*ωθ
=cl tot cl tot F0m m tot m F F T sign d T v )-+()(--γωω** (2)
制动力cl F 建模为一个依赖于主轴行程AG x 的非线形方程的特征曲线
B 2
sp B B cl x F χβα++=* (3) 信号分析:
以下部分的目的是在制动器可实现的信号根据其对制动力计算的可行性进行计算。
电机转子位置——由于电机是电子整流的,转子位置信号在制动器上就可以实现。如果整个机构的刚度已知,就可以由转子位置计算制动力。
要通过测量电机转子位置的可行性来计算制动力,就应测出每一个制动元件的刚度及其变化,为了对第三代产品进行刚度分析,将制动器的以下结构元件进行单独处理:
? 齿轮单元 (行星齿轮、行星滚轮及中心轴承)
? 制动片
? 制动盘
?
制动块 系统总刚度根据串接元件的刚度由以下公式算出:
制动块制动盘制动片齿轮制动器+++=C 2C 1C 1C 1
1C (4)
齿轮单元的刚度在设计过程中用CAD 程序算出。刚度曲线在微小作用力下是渐变的,外力较大时呈线形特征,它约占总刚度的5%。
Continental Teves 公司采用一台专用的测试台测试制动片的刚度。球墨铸铁制动片在完全装配好的机电制动器下受力发生的应变并不与外力呈线性关系。就像制动片的刚度曲线一样,是渐变的。它约占制动器总刚度的72%。
制动盘刚度可通过测量盘厚和制动盘有效工作区域及应用灰铸铁的弹性模量算出,其约占制动器总刚度的2%。
我们采用了对串接放松的新制动块进行随机测量的通用机械测量制动块刚度,如图15所示。制动块在冷却条件下11mm 厚时约占系统总刚度的21%。
图15 不同厚度与温度下的制动块刚度
图16 描绘了制动器各元件刚度在总刚度中所占的比例。
图16 Continental Teves 公司第三代制动器中各元件占系统总刚度的百分比。 齿轮单元和制动片的最高温度只有200℃。因此,它们受温度影响对制动器总刚度的变化是可以获略的。
尽管制动盘在温度上升到800℃时,刚度约变化大约20%,但由于其只占总刚度的2%,所以,其对系统总刚度的变化还是可以获略的。
制动块由于磨损和温变产生的影响可达原值的200%,而且由于其占系统总刚度的21%,所以其影响是非常大的。
为了证明其影响,图17给出了四种不同的刚度特征曲线。制动块的厚度和温度不仅影响刚度,而且影响电机转子转角和制动力响应的滞后。
图17 不同制动块厚度和制动盘温度下整个制动机构的刚度
对电机转子位置的分析表明只要能找到一种调整刚度曲线的方法,就可实现根据刚度特性曲线计算电机转子位置。
电机电流——电机电流是对制动力修正的可行的第二个机电制动器信号。 图18 不同制动状态下制动力与电机电流的关系
图18描绘了在控制制动钳力的条件下制动器在不同状况下运行时电机电流和制动力cl F 的关系制动夹紧曲线和松开曲线之间的区域就表明了机电制动器的效率。间隙越大,则效率越差。图18所示,电机电流制动曲线中,当制动力很小时,低谷后有一峰值,这是由于制动机构刚刚启动时,需要一个相对较大的转矩加速其惯性质量以消除制动器的运动间隙。
然而,图18主要体现的时在不同制动条件下制动曲线的形状。由图3我们已经知道机电制动器转换参数中主要影响因素时温度和磨损,所以,为了深入研究,就不断改变二者之间的影响。在温度变化上,可以通过将制动力持续施加5分钟,以使其制动温度达到400℃,这样,制动热就扩散到了整个制动机构。温度升高可以提高润滑脂的粘性,进而会降低中心轴承和行星滚轮的摩擦,摩擦降低也就是效率的升高,图18也体现了这一点。
为了模拟磨损的影响,采用人为磨损过的主轴,其结果时大大增加了主轴坏道与滚子间的摩擦。以这种形式造成的效率降低会致使PRG 在各制动力下产生自锁,见图18。
对于巨大的滞后和变化的齿轮效率,仅仅使用电机效率来对制动力进行修正是不大可行的,仅由一个特定的电机电流值,在效率和制动条件未知的情况下,是不可能算出制动力的精确值的。
制动力计算:
为了了解开发制动力算法中的问题,有必要进一步分析简化制动器模型的方程(2),将方程(1)代入等式(2),然后将可测量的量全部移到左边,可以得出:
use v F c F m tot m T T T I ++=-?..ωθψ
u s e c F T T +≈.
=cl tot cl tot F m F F T sign υγω++))((0 =m tot tot m tot tot F m c c T sign ?γ?γ?++?))((0 (5) 即使在制动过程中,粘滞摩擦相对与外加扭矩和库仑摩擦转距是可以忽略的,仍然还有两个未知参数tot γ和tot c ,且二者都和电机转子转角m ?相联系而作为输入变量。从技术角度来看,可用转矩和摩擦转矩一起体现了机电转换器的载入。没有内部信号可以将二者在参数上分开。因此,有参考文献(12)的算式(2),未知参数不能由普通的参数识别方法算出。
然而,可以利用机电制动器的一个特性在摩擦损失未知的情况下算出当前的制动力。制动器有两种工作状态:夹紧和放松。再看一下算式(5),摩擦损失的
绝对值cl tot F F T γ+0在制动力cl F 相同时沿两个方向作用是相等的。用相同的方法,假使某一电机转子转角tm ?在很短的时间内传给两个相反的转动方向,致使tot c 尚未发生改变,输出转角相同,摩擦损失m tot tot F c T ?γ+0的绝对值在两个方向都是
相等的,由可用的电机转矩*m T (根据惯性损失修正过),由方程(2)导出了以
下制动方程:
cl tot cl tot F cl m F F T T υγ++≈*)(0,
=m tot tot m tot tot F c c T ?υ?γ++)(0 (6) 释放制动时:
cl tot cl tot F rl m F F T T υγ++-≈*)(0,
=m tot tot m tot tot F c c T ?υ?γ++-)(0 (7) 将两式相加,就可以得出某一电机转子转角下的制动力:
t o t rl
m cl m cl T T F υ2,,**+= (8)
图19描绘了使用电机制动转矩*cl m T ,和释放转矩*rl m T ,。制动器效率小于100%时制
动曲线就到了理想状况下(效率为100%)的上方。而释放时曲线就位于其下方。两种状态下,到理想曲线的距离总是相等。
图19 循环计算下机电制动器的效率图
通过在一个振幅很小的由驾驶员或电子安全系统发出的控制信号上附加一个高频的位置输入信号,制动器机构可以很快在两个方向达到指定的转角。激励信号应由一个处理标准来控制,以便当输入信号梯度很小时可以加上。这样,电机转矩转角曲线就覆盖了很小的区域,如图19效率曲线所示。
为了提高制动力计算值的精度,对沿这一区域的所有点进行测量。因此,就使用了很多种方法,图20显示了复杂制动器模型的7种方法的计算结果。方法2计算了线的纵坐标,它在垂直方向上将区域两等分。另一种方法就是算出这一条线(比如使用最小二乘法),使之最佳地符合由方程(8)得出的与区域内转子转角对应的值。然后,由计算曲线与转子转角的交点就可以得出所需的制动力(方法7)。方法5采用计算区域重心纵坐标的方法。由于最后一种方法得出的仿真效果最好,而且易于在微控制器上实现实时计算,就被用于深入研究。
图20 不同计算方法下制动力的计算结果
为了证实粘滞摩擦可以忽略这一假设,图21分别描绘了考虑与忽略粘滞摩擦下设置不同制动力值时计算制动力的值。然而,用转动惯量对制动转矩m T 进行修正是必要的。特别是在制动力很小的情况下,电机转矩也很小,转动惯量对计
算结果的误差影响很大。
图21 粘度修正和惯性修正对计算结果的影响
进一步对复杂制动系统进行模拟分析,以找到对外加激励信号的优化频率和幅值。而且模型仿真对电机电流和转子转角信号的滤波器进行了证明。
图22 实际制动器模型的制动力计算结果
将MATLAB 的制动力算法转化为微控制器程序平台的C 语言格式。图22给出了实际制动器在16位微控制器下的计算机结果。
由于微控制器对小电机电流值AD 转换时量化误差的不断增加及采用相对误差进行描述的原因,在制动力小的情况下有很大的相对误差。
图23 制动力修正方法的模块图
然而,计算出的制动力不可以直接用于制动器的控制,因为其以一种非常小
的频率发生无规则的更新。因此,第二种方法可以通过使用计算的制动力数值*cl
F 调整简化制动器模型(如刚度特性曲线)。调整时可以忽略一些因素,采用最小二乘法,参阅参考文献[12]。为了控制制动器,要对调整后的制动器模型的制动力输出进行处理。
图23以图块的形式描绘了总制动力修正的算法。为了实现这一过程,刚度特性曲线选作位可调整模块。由图17,我们可以发现不同温度和不同制动块厚度下,刚度特性曲线很相似。仅用一个比例因子将不同的制动力和转子转角关系分开。
为了调整刚度特性曲线,因此只需以图表形式存入一条基本特性曲线,然后
采用不同的比例因子α,再不断减少制动力计算值*est cl F ,与模型输出est cl F ,的误差
就行了,见图24。在实际应用中,将一常规的磨损过的制动块(约厚8mm )的刚度曲线作为一个毫无迟滞的中性线存入微控制器的存储单元中。对这些曲线上的点之间的值,用插值法求取。为了找到模型误差最小的曲线点,可以用Simplex 算法优化处理。
图25给出了对曲线点优化过的刚度特性曲线。
图24 同一化方法的模块图
图25 以曲线点形式存入的刚度特性曲线
间隙处理:
有两个原因使间隙处理成为电制动器低成本控制中的一大问题。与液压释放后间隙可以自动调整的液压制动器相比,机电制动器必须要主动调整间隙。第二个要找到其接触点的原因是因为这一点就是刚度特性曲线的零值点,见图25。接触点测量的准确程度就直接影响到制动力计算的精度。
在这种动因下,我们研究了一种只根据电机转子位置和电机电流来检测制动块与制动盘接触点的方法。通过计算刚度商数:m
m d dT ?λ*=,使检测与制动力信号设置值相独立。这一值在超过某一边界值时可以被检测到。
用这种启动方法在系统启动后可以对制动器进行初始化。它也可以对正常制动下每一次制动的信号进行处理,以适应刚度曲线的零值。
为了证实这种新方法使用的可重复性,对其进行了192次运行检测。图26描绘了绝对检测误差的分布情况。
图26 接触点绝对测量误差的分布
进而,也对主轴/制动块在不同起始条件下接触点的测量方法进行了测试。图27表明在改进方法下起始点对测量精度没有影响。
图27 不同起始点下间隙调整结果
实验结果:
为了证明新的制动力算法包括间隙处理方法的潜力,我们对两个制动测试回路进行了分析。首先,用一套实际的制动力设备对BMW318i进行驾驶试验,置以信号值,并将其作为车轮模块的输入。修正的制动力由制动力控制器处理以作为反馈。为了证明计算的准确性,图28对修正的制动力信号和集成传感器的参考信号作了对比。二者非常吻合。
图28 BMW318i进行制动力设值的计算结果
第二个试验是在修车厂进行制动块变化。磨损坏的制动块(厚度2mm)换成新制动块(11,8mm),图28所示,对于就制动块,制动循环过程呈三角状运行。由于严重磨损过的制动块刚度曲线比一般磨损的制动块刚度曲线更陡,所以比例因子α就更大。更换制动块后,算法就复位了,在下一个制动循环中,系统很快就将比例因子α调整到0.7。这一过程必须在具有初始化程序的修车厂完成。相应的,图29也描绘了仅由基线而不对α进行调整的情况。很显然,对刚度特性曲线的调整对计算制动力是必不可少的。
图29 制动块改变的三个制动循环测试
图30 更换制动块后的α调整
结论:
开发电制动系统制动力算法这一挑战性的任务必须要有一个灵活开放的环境。本文所指的开发环境包括复杂的和简化的制动测试平台。通过这些工具,就可能实现制动力控制和制动力计算算法的快速设计。
在本文中,模型和测试台首先测出在可能的制动力下电机电流和电机转子转角值。据表明,二者在没有制动力传感器下都有缺陷,因为其与制动力的关系会发生很大的变化。
所以,我们开发了一种算法,以调整电机转子转角和制动力(刚度特性曲线)的关系,一个智能的处理制动块与制动盘间隙的方法。它可以很好地反复地检测制动盘与制动块地接触点并调整间隙。
最后,两个制动测试循环显示了这种新颖的制动力算法的精度质量。
列车制动力计算公式
1,紧急制动计算列车总制动力列车制动力计算 B h K h (kN) 式中K h ------ 全列车换算闸瓦压力的总和,kN; h --- 换算摩擦系数; 列车单位制动力的计算公式 b B 1000 1000 h K h ( N / kN ) ( P G) g ( P G) g 其中 (P K h G) g h ( N / kN ) ,则b 1000 h h 式中P G ------------ 列车的质量,t ; h --- 换算摩擦系数; h ------------------ 列车制动率; K h ------ 全列车换算闸瓦压力的总和,kN; 2,列车常用制动计算 b c 1 c b 由此可得b c c b 1000 h h c ( N / kN ) 式中 c ------------- 常用制动系数 b c ------- 列车单位制动力 表1 常用制动系数p1 为列车管空气压力 列车管减压量r/kPa 50 60 70 80 90 100 110 120 130 140 150 160 170 旅客 p1 600kPa 列车0.19 0.29 0.39 0.47 0.55 0.61 0.69 0.76 0.82 0.88 0.93 0.98 1.00 货物 p1 600kPa 列车0.17 0.28 0.37 0.46 0.53 0.60 0.67 0.73 0.78 0.83 0.88 0.93 0.96
p1 600kPa 0.19 0.32 0.42 0.52 0.60 0.68 0.75 0.83 0.89 0.95 --- --- --- 3, 多种摩擦材料共存时列车制动力的计算 同一列车中的机车,车辆可能采用不同材料的闸瓦或闸片,他们具有不同的换算摩擦系数列车总制动力应当是各种闸瓦的换算闸瓦 压力与该种闸瓦的换算摩擦系数乘积的总和。即 B h1 K h1 h2 K h2 h3 K h3 ( h K h )(kN) 式中,K h1 ,h1 代表机车的闸瓦制动,K h 2 ,h2 代表车辆的闸瓦 制动,K h3 , h3 代表车辆的盘形制动,等等。 列车单位制动力 1000 ( h b K h) 1000 ( h h )( N / kN ) 。 ( P G) g 4,列车制动的二次换算法 表2 不同摩擦材料换算闸瓦压力的二次换算系数 类别 基型高磷(中磷)闸瓦高摩合成闸片高摩合成闸瓦 高磷(中磷)闸瓦 1.0 0.56 0.63 高摩合成闸片 1.8 1.0 1.1 高摩合成闸瓦 1.6 0.9 1.0 低摩合成闸瓦0.8 0.45 0.5 粉末冶金闸瓦 1.3 0.7 0.8 种类 表3 机车的计算质量及每台换算闸瓦压力表 机型计算质量/t 闸瓦种别每台换算闸瓦压力 /kN SS1、SS3 、SS6 138 铸铁700<435>《355》 SS 3B 、SS 6B 138 高摩合成300(480)《240》
盘式制动器课程设计方案
中北大学 课程设计说明书 学生姓名:学号: 学院(系):机电工程学院 专业:车辆工程 题目:夏利汽车盘式制动器方案设计 综合成绩: 职称: 年月日
目录 一、夏利汽车主要性能参数---------------------4 二、制动器的形式-----------------------------5 三、盘式制动器主要参数的确定-----------------7 四、盘式制动器制动力矩的设计计算-------------9 五、盘式制动器制器的校核计算----------------10 1.前轮制动器制动力矩的校核计算 2.摩擦衬片的磨损特性计算 六、经过计算最终确定后轮制动器的参数--------13 七、设计小结--------------------------------13 八、设计参考资料----------------------------13
轿车前轮制动器设计说明书前言汽车制动系是用以强制行驶中的汽车减速或停车、使下坡行驶的汽车车速保持稳定以及使已停驶的汽车在原地(包括在斜坡上)驻留不动的机构。随着高速公路的迅速发展和车速的提高以及车流密度的日益增大,为了保证行车安全,汽车制动系的工作可靠性显得日益重要。也只有制动性能良好、制动系工作可靠的汽车,才能充分发挥其动力性能。本次课程设计根据任务要求只对夏利汽车盘式制动器方案设计。
一、汽车主要性能参数 主要尺寸和参数: (1)、轴距:L=2405mm (2)、总质量:M=900kg (3)、质心高度:0.65m (4)、车轮半径:165mm (5)、轮辋内径:120mm (6)、附着系数:0.8 (7)、制动力分配比:后制动力/总制动力=0.19 (8)、前轴负荷率:60%;即质心到前后轴距离分别为 L1=L?(1?60%)=962mm L2=L?60%=1443mm (9)、轮胎参数:165/70R13; 轮胎有效半径r e为: 轮胎有效半径=轮辋半径+(名义断面宽度×高宽比) 所以轮胎有效半径r e=(240 2 +165×70%)=235.5mm (10)、制动性能要求:初速度为50KM/h时,制动距离为15m。则 满足制动性能要求的制动减速度由:S=1 3.6(τ2‘+τ2“ 2 )μ0+μ02 25.92 a bmax 计算最大减速度 a bmax,其中μ0=U =50Km/h;S=15m;τ2‘= 0.05s;τ2“=0.2s。经计算得 最大减速度 a bmax≈7.47m s2 ?
提升机制动系统计算
提升机制动系统计算 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
提升机制动系统的验算 一、副井最大静张力、静张力差的验算: 副井技术参数: 绞车型号:2JK —20 罐笼自重:3450kg 一次提物载重量:6332kg 提人重量:1275kg 提升高度:540m 每米绳重m 最大静张力:17000kg 最大静张力差:11500kg 变位质量:64228(kg s2/m ) 楔形连接器:227 kg 盘形制动器型号:TS-215(闸瓦面积749cm 2,摩擦半径1.7m ,油缸作用面积138cm 2,液压缸直径15.4cm,活塞杆直径7.0cm ,一个油缸产生的最大正压力6300kg )。 液压站型号:GE131B 型(制动油最大压力,最大输油量:9L/min,油箱储油量:500L ,允许最高油温:65℃)。 1、最大静张力的验算: PH Q Q Q F Z j +++=21m ax = 718+2448+3450+227+3569 =10413kg<18000kg 式中: Q 1—矿车重量 Q 2—碴重量 Q Z —罐笼自重(包括楔形连接器) P — 钢丝绳自重 H — 提升高度
通过计算,提升机最大静张力10413kg 小于提升机允许的最大静张力18000kg ,符合《煤矿安全规程规程》第382条规定要求。 2、最大静张力差的验算: PH Q Q F c ++=21m ax =3166+3443 =6609kg 〈12500kg 式中:Q 1—矿车重量, kg Q 2—碴重量, kg 通过计算,提升机最大静张力差6609kg ,小于提升机允许的12500kg ,符合《煤矿安全规程》第382条规定要求。 二、安全制动力矩的验算: 1、安全制动力矩: 式中: M Z —安全制动力矩 μ — 闸瓦与制动盘摩擦系数, R m — 摩擦半径,1.7m n — 制动闸副数,8副 N — 制动盘正压力 N=)/(C K F n l +?- K — 碟形弹簧刚度,4100kg/mm ?— 闸瓦最大间隙,2mm n l — 一组碟形弹簧片数,8片 C — 制动器各运动部分的阻力,
制动力计算
汽车制动力计算 G4 6个电池组6X28=168KG 总重量530KG 车辆中心位置(x,y,z ): -8 , 261, 1559 (原点在前轮轴中间) 车轮轴距离地面的距离为230; 轴间距L=2370 地面对前轮的法向反作用力为:F1=(mg/L)[b+(h g/g)(du/dt)] 地面对后轮的法向反作用力为:F2=(mg/L)[a-(h g/g)(du/dt)] L——汽车轴距;=2370mm a --- 重心到前轴中心线的距离;=1559mm b——重心到后轴中心线的距离;=2370-1559=811mm hg -- 汽车重心高度;261+230=490mm du/dt ――汽车制动减速度; 国家规定汽车的制动数据为:制动初速度为80km/h,制动的距离为50m 2 因此:du/dt=4.9m/s 所以地面对后轮的法向反作用力F2: =(450*9.8/2370){1558-[ (200+89)/9.8]*4.9} =2630N B = (b+? hg) /L=(811+0.7*490)/2370=0.49 汽车的前后轮制动力为: F U1+F U2=?G; F U1/F U2= (b+ ?h) /(a- ? h) ? ――附着系数,(干沥青路面,取0.7 ) F U1 < (mg ? /L) (b+? h g) F U2W (mg? /L) (a- ? h g) F U2W (mg ? /L) (a- ? h g) 所以G4的后轮制动力为: =530*9.8*0.7*(1559-0.7*490)/2370 =1865N
对于轮缸式制动器和盘式制动器,制动力F: F ui=2p*(Pi*D i2/4)*n i*C i*R i/r d F U2 =2p2*(Pi*D 22/4)*n 2*C2*RJr d F ui, U2――分别为前、后轮的制动力,N; D , D2—分别为前、后轮缸直径,m n i,n2 ------ 分别为前、后制动器单侧油缸数目(仅对于盘式制动器而言); C,C2――分别为前、后制动器的效能因数; R,R――分别为前、后制动器的工作半径,m r d ------ 轮胎动负荷半径; 效能因数是指在制动鼓或制动盘的作用半径上所得到的摩擦力与输入力之比。 C=(M/r)/F 0 M制动器输出的制动力矩 r――制动鼓或者制动盘的作用半径 F。一一为制动器输入力 制动器的效能因数取决与制动器的类型、结构特点和结构参数等因素,并受摩擦片的摩擦系数变化的影响。(参见“汽车工程手册设计篇”,表格5-3-1和5-3.3) 鼓式刹车的效能因数:(参见“汽车工程手册基础篇191页”) 盘式刹车的效能因数:(参见“汽车工程手册基础篇195页”) 同步附着系数?。=(LB -b ) / h g B――制动力分配系数;既前轴制动器制动力与前、后轴制动器总制动力的比值表示。一般取0.6
毕业设计盘式制动器设计说明书
汽车盘式制动器设计 摘要:本文主要是介绍盘式制动器的分类以及各种盘式制动器的优缺点,对所选车型制动器的选用方案进行了选择,针对盘式制动器做了主要的设计计算,同时分析了汽车在各种附着系数道路上的制动过程,对前后制动力分配系数和同步附着系数、利用附着系数、制动效率等做了计算。在满足制动法规要求及设计原则要求的前提下,提高了汽车的制动性能。 关键词:盘式制动器;制动力分配系数;同步附着系数;利用附着系数;制动效率
Automobile disc brake design Abstract:This paper is mainly the disc brake of the classification and various kinds of disc brake of the advantages and disadvantages are introduced, the selection scheme of the chosen vehicle brake was selected and for disc brake do the main design calculation and analysis of the car in a variety of attachment coefficient road on the braking process of, of braking force distribution coefficient and the synchronous adhesion coefficient, utilization coefficient of adhesion, braking efficiency calculated. Under the premise of meeting the requirements of the braking regulation requirement and design principle and improve the braking performance of automobile. Key words: Disc brake,Braking force distribution,coefficient,Synchronization coefficient,Synchronous adhesion coefficient,The use of adhesion coefficient,Braking efficiency
《气压盘式制动器制动力矩的计算》
T= 气压盘式制动器制动力矩的计算 1.制动力矩 在气压盘式制、动器中,制动力矩T f 主要来源于压力臂(增力杠杆元件)对气室推力Q 的放大,我们将其称之为传动比K ,经过增力机构放大的正推力为W p ,则W p =KQ 。 ηηe e p f KQfR fR W T 22== Tf=2W P fRe η Q ——气室推力; f ——摩擦块的摩擦系数; R e ——制动半径; η——机械传动效率。 2.制动半径 根据右图,在任一单 元面积RdR ?d 上的摩擦力 对制动盘中心的力矩为 ?dRd fqR 2,式中q 为衬块与 制动盘之间的单位面积 上的压力,则单侧制动块作用于制动盘上的
制动力矩为: θ?θθ)(322313222 1R R fq dRd fqR T R R f -==??- 单侧衬块给予制动盘的总摩擦力为: θ?θθ)(21 222 1R R fq dRd fqR fW R R p -==??- 得有效半径为: )2]()(1[34322212212121223132R R R R R R R R R R fW T R P f e ++-=--?== 式中R 1=134,R 2=214(考虑到制动盘的倒角) 计算得:R e =177。 3.压力臂力臂 下图为装配状态压力臂的工作范围图: 由上图简化成下列坐标关系:
坐标原点为气室推杆的安装基点; 压力臂工作圆心的坐标点为(67.57,38.84),极坐标为(77.94,29.892°); 工作半径R =67.65; 工作范围:α=74°~90°~85.83°; 气室推杆端部球头圆心的运动轨迹方程: 220002)cos(2R =+--ρααρρρ (1) 其中94.770=ρ;?=892.290α;65.67=R 代入(1)式得:012.1498)892.29cos(88.1552 =+?--αρρ (2) 设气室推出长度为H ,10-=ρH 。 制动力臂的长度为L ,由坐标关系图可以得到下式: ααsin )84.3857.67(ctg L -= (3) 因此,测出气室的推出长度,就可以求出压力臂的力臂长度。
制动力矩计算
鼓式制动器制动力矩的计算 1、制动器效能因数计算 根据制动器结构参数可知: A 、 B 、 C 、r 、φ、(结构参数意义见附图二) 其中θ为最大压力线和水平线的夹角。 由以下公式计算μ=0.35时(μ为摩擦片与制动鼓间摩擦系数),制动器领蹄和从蹄的制动效能因数。 θ=)tan(B C ar μγt a n ar = )t a n s i n s i n t a n (θφφφφθ+-=ar e θθγλ-+=e θθγλ+-=e ' φφφρsin 2sin 4+= r B A +=ξ r C B k 22+= 领蹄制动效能因数: 1sin cos cos 1-=?γ θρλξ?e k K 从蹄制动效能因数:
1 sin cos 'cos 2+=?γ θρλξ ?e k K 制动器的总效能因数,可由领、从蹄的效能因数按如下公式计算: 2 11 24??φ?????+?=K K K K K 2、制动器制动力矩计算 单个制动器的制动力矩M 为: R P K M ??= 其中:K 为制动器效能因数 P 为制动器输入力,加于两制动蹄的张开力的平均值; R 制动鼓的作用半径,即制动器的工作半径r 制动器输入力η??=i F P /2 其中:F 为气室推杆推力,由配置的气室确定 i 为凸轮传动比,e L i /= (L 为调整臂臂长,e 为凸轮力臂,即凸轮基圆半径) η为传动效率,一般区0.63 例:某Φ400X180制动器,A=150 B=150 C=30 r=0.2 Φ=115° μ=0.35 η=0.63 通过上公式计算得1??K =1.530 2??K =0.543 2 11 24??φ?????+?K K K K K ==1.603 取F=9900N(0.6MPa 气压下气室输出力) L=125 e=12 R P K M ??==R L F K ????η/2e=1.603*9900*125*0.63*0.2/(2*12) =10414N.m
制动器的设计计算
§3 制动器的设计计算 3.1制动蹄摩擦面的压力分布规律 从前面的分析可知,制动器摩擦材料的摩擦系数及所产生的摩擦力对制动器因数有很大影响。掌握制动蹄摩擦面上的压力分布规律,有助于正确分析制动器因数。在理论上对制动蹄摩擦面的压力分布规律作研究时,通常作如下一些假定: (1)制动鼓、蹄为绝对刚性; (2)在外力作用下,变形仅发生在摩擦衬片上; (3)压力与变形符合虎克定律。 1.对于绕支承销转动的制动蹄 如图29所示,制动蹄在张开力P 作用下绕 支承销O ′点转动张开,设其转角为θΔ,则蹄片 上某任意点A 的位移AB 为 AB =A O ′·θΔ 由于制动鼓刚性对制动蹄运动的限制,则其径向位移分量将受压缩,径向压缩为AC AC =AB COS β 即 AC =A O ′θΔCOS β 从图29中的几何关系可看到 A O ′COS β=D O ′=O O ′Sin ? AC =O O ′Sin ?θΔ? 因为θΔ?′O O 为常量,单位压力和变形成正比,所以蹄片上任意一点压力可写成 q=q 0Sin ? (36) 亦即,制动器蹄片上压力呈正弦分布,其最大压力作用在与O O ′连线呈90°的径向线上。 2.浮式蹄 在一般情况下,若浮式蹄的端部支承在斜支座面 上,如图30所示,则由于蹄片端部将沿支承面作滚动 或滑动,它具有两个自由度运动,而绕支承销转动的 蹄片只有一个自由度的运动,因此,其压力分布状况 和绕支承销转动的情况有所区别。 现分析浮式蹄上任意一点A 的运动情况。今设定蹄片和支座面之间摩擦足够大,制动蹄在张开力作用
下,蹄片将沿斜支座面上作滚动,设Q 为其蹄片端部圆弧面之圆心,则蹄片上任意一点A 的运动可以看成绕Q 作相对转动和跟随Q 作移动。这样A 点位移由两部分合成:相对运动位移和牵连运动位移BC ,它们各自径向位移分量之和为 (见图 30)。 AD =AB COS β+BC COS(?-α) 根据几何关系可得出 AD =(θΔ·OQ +BC Sin α) Sin ?+BC COS αCOS ? 式中θΔ为蹄片端部圆弧面绕其圆心的相对转角。 令 θΔ·OQ +BC Sin ?=C 1 BC COS α=C 2 在一定转角θΔ时,1C 和2C 都是常量。同样,认为A 点的径向变形量AD 和压力成正比。这样,蹄片上任意点A 处的压力可写成 q=q 1Sin ?+q 2COS ? 或 q=q 0Sin(?+?0) 也就是说,浮式蹄支承在任意斜支座面上时,其理论压力分布规律仍为正弦分布,但其最大压力点在何处,难以判断。 上述分析对于新的摩擦衬片是合理的,但制动器在使用过程中摩擦衬片有磨损,摩擦衬片在磨损的状况下,压力分布又应如何呢?按照理论分析,如果知道摩擦衬片的磨损特性,也可确定摩擦衬片磨损后的压力分布规律。根据国外资料,对于摩擦片 磨损具有如下关系式 fqv K W 11= 式中 W 1——磨损量; K 1——磨损常数; f ——摩擦系数; q——单位压力; v ——磨擦衬片与制动鼓之间的相对滑 动速度。 通过分析计算所得压力分布规律如图31所 示。图中表明在第11次制动后形成的单位 面积压力仍为正弦分布αsin 132=q 。如果摩 擦衬片磨损有如下关系: 2222v fq K W = 式中 2K ——磨损常数。 则其磨损后的压力分布规律为αsin C q =(C
提升绞车的常用闸和保险闸制动计算
提升绞车的常用闸和保险闸制动计算 提升绞车的常用闸和保险闸制动时,每个闸所产生的制动力矩与实际提升最大静荷重旋转力矩之比K值都不得小于3。 当常用闸或保险闸制动轮与滚筒同轴时,由于制动轮直径和滚简直径不同,制动安全系数不能直接用制动力与最大静张力之比,必须用制动力矩与最大静荷重旋转力矩之比,即: K=F z R z /F r R r 式中 F z ——制动力; R z ——制动轮半径; F r ——钢丝绳最大静张力; R r ——钢丝绳提升中心到滚筒轴中心的旋转半径。 当常用闸或保险闸制动轮与滚筒不同轴时,还应将减速比和传动效率计算 在内,即K=(F z R z /F r R r )×i·η 式中 i——减速比; η——减速器传动效率。 常用闹和保险闸的作用是在需要时,能可靠地使提升系统停止运行。要使提升系统可靠地停止运行,每个闸的制动力矩只比最大静荷重旋转力矩大是不够的,还必须克服系统的转动惯量才能停住车。在充分考虑了重物下放时,制动力矩要克服最大静荷重和较大的系统转动惯量再有一定的安全系数后,确定K不得小于3。由于保险闸是在紧急情况下自动施闸的,如果系统转动惯量小,会使制动减速度大于提升容器的自然减速度,导致松绳,提升容器反向冲击,易断绳跑车。可使K≥2,因为上提重物停车时,钢丝绳承受的最小冲击张力是最大静张力的2倍。当K<2时,停车会不可靠,所以保险闸的K值不得小于2。 工作闸由于是人工控制施闸,不能造成施闸太急松绳跑车,必须K不得小于3。 保险制动的K值不小于2的第2个原因是,当前主井提升还没有全部达到定重装载,或定重装置失效时,提升容器将被装满为止,而货载在矸石多、水大(尤其是综合采煤放顶时,有时肝石很多)时,一台9t箕斗容积,可能装载达到×=17t,一台12t箕斗容积为,装载量可以达到22t。如果是等重平衡绳提升,最大静张力将达到额定值的~倍,如果保险制动K值达到2,就会因过载提升中过流保护动作停电制动不住而坠斗。 保险制动K值不得小于2的第3个原因是,一般提升机电机的过载能力为左右,绞车正常时在额定静张力(差)状态下工作,当箕斗里装满了矸石或矿车载重增加,挂车超多时,如果载重达到正常值的2倍以上,绞车提不动还可以,一旦没有超过电机的最大负载转矩,将重物提升中途,因过流保护动作而停电紧急制动时,也会因保险制动K值小于2而造成坠斗、跑车。例如某年7月,某矿一台回绳摩擦轮提升绞车,就是因为定重装置故障没有及时修复,将载重为12t的箕斗,装满了矸石,在提升未到终点时过流保护动作,保险制动后未闸住而高速坠斗,造成了全矿停产18天的重大提升事故。由此吸取的教训是,定重装载、保险制动K值不小于2非常重要。同时提升绞车的过电流整定,在不影响电机安全和寿命前提下,适当放宽反时限过流保护的时间是有好处的,而保护短路和严重卡斗的瞬动电流整定还是越小越好。 保险制动力是否越大越好呢,不是,保险制动的"保险",体现在特殊情况下需要紧急制动时,保险制动会自动、快速进行制动,因此要采用配重或弹簧
制动计算公式 (2)
平板台制动计算公式 一、前轴 1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×0.98】×100% 2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100% 二、后轴 1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(动态轮荷左+动态轮荷右)×0.98】×100% 2、两种情况算法 (1)后轴行车制动率>60%时 后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100% (2)后轴行车制动率<60%时 后轴不平衡率=(过程差值大-过程差值小)÷【(动态)轮荷之和×0.98】×100% 滚筒制动台计算公式 一、前轴 1、前轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×0.98】×100% 2、前轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100% 二、后轴 1、后轴行车制动率=(最大行车制动力左+最大行车制动力右)÷【(轮荷左+轮荷右)×0.98】×100% 2、两种情况算法 (1)后轴行车制动率>60%时
后轴不平衡率=(过程差值大-过程差值小)÷最大行车制动力中大的值×100% (2)后轴行车制动率<60%时 后轴不平衡率=(过程差值大-过程差值小)÷【轮荷之和×0.98】×100% 注:(1)机动车纵向中心线位置以前的轴为前轴,其他轴为后轴; (2)挂车的所有车轴均按后轴计算; (3)用平板台测试并装轴制动力时,并装轴可视为一轴 整车制动率 整车制动率=最大行车制动力÷(整车轮荷×0.98)×100% 驻车制动率 驻车制动率=驻车制动力÷(整车轮荷×0.98)×100% 台式检验制动率要求(空载) 台式检验制动力要求(加载)
《气压盘式制动器制动力矩的计算》
气压盘式制动器制动力矩的计算 (Calculation on braking torque of air disc brake ) 勇波 摘要: 气压盘式制动器ADB (air disc brake )制动力矩的大小,从一开始使用就是争论的焦点。本文试图从实证研究入手,建立制动力矩的数学模型。 关键词: 气压盘式制动器ADB (air disc brake ); 制动力矩——使汽车运动减速或停止的力矩; 压力臂——气压盘式制动器中产生增力的杠杆元件; 传动比——ADB 增力机构对输入力的放大比例。 参考书目: 《最新汽车设计实用手册》 林秉华 正文: 20世纪90年代,气压盘式制动器ADB (air disc brake )开始被广泛应用于商用车辆,近几年在国内发展迅速,城市公交客车、中高档客车已经普遍采用ADB 配置。但各种各样的仿制产品在行业内落地生根的同时,理论上的研究显得比较冷清。在此,我抛砖引玉,对ADB 产品的传动比和制动力矩的计算方法作一番探讨和归纳。 1.制动力矩 在气压盘式制动器中,制动力矩T f 主要来源于压力臂(增力杠杆元件)对气室推力Q 的放大,我们将其称之为传动比K ,经过增力机构放大的正推力为W p ,则W p =KQ 。 ηηe e p f KQfR fR W T 22== Q ——气室推力; f ——摩擦块的摩擦系数; R e ——制动半径; η——机械传动效率。 2.制动半径 根据右图,在任一单元面积RdR ?d 上的摩擦力 对制动盘中心的力矩为?dRd fqR 2,式中q 为衬块 与制动盘之间的单位面积上的压力,则单侧制动块 作用于制动盘上的制动力矩为: θ?θ θ)(3 223132221R R fq dRd fqR T R R f -==??- 单侧衬块给予制动盘的总摩擦力为: θ?θ θ)(212221R R fq dRd fqR fW R R p -==??- 得有效半径为:
列车制动力计算公式
列车制动力计算 1,紧急制动计算 ①列车总制动力 )(kN K B h h ∑=? 式中 ∑h K ------全列车换算闸瓦压力的总和,kN ; h ?---换算摩擦系数; ②列车单位制动力的计算公式 )/()(1000)(1000kN N g G P K g G P B b h h ?+=?+?=∑? 其中 )/()(kN N g G P K h h ?=?+∑,则h h b ???=1000 式中 G P +------------列车的质量,t ; h ?---换算摩擦系数; h ?------------------列车制动率; ∑h K ------全列车换算闸瓦压力的总和,kN ; 2,列车常用制动计算 1≤= b b c c β 由此可得 )/(1000kN N b b c h h c c β??β=?= 式中 c β-----常用制动系数 c b -------列车单位制动力 表1 常用制动系数 1p 为列车管空气压力 列车管减压量r/kPa 50 60 70 80 90 100 110 120 130 140 150 160 170 旅客列车 kPa p 6001= 0.19 0.29 0.39 0.47 0.55 0.61 0.69 0.76 0.82 0.88 0.93 0.98 1.00
3,多种摩擦材料共存时列车制动力的计算 同一列车中的机车,车辆可能采用不同材料的闸瓦或闸片,他们具有不同的换算摩擦系数列车总制动力应当是各种闸瓦的换算闸瓦压力与该种闸瓦的换算摩擦系数乘积的总和。即 ) )((kN 332211∑∑∑∑∑=???+++=h h h h h h h h K K K K B ????式中,1h K ,1h ?代表机车的闸瓦制动,2h K ,2h ?代表车辆的闸瓦制动,3h K ,3h ?代表车辆的盘形制动,等等。 列车单位制动力 )/()(1000)()(1000kN N g G P K b h h h h ∑∑∑?=?+= ???。 4,列车制动的二次换算法 表2 不同摩擦材料换算闸瓦压力的二次换算系数 类别 基型 高磷(中磷)闸瓦 高摩合成闸片 高摩合成闸瓦 高磷(中磷)闸瓦 1.0 0.56 0.63 高摩合成闸片 1.8 1.0 1.1 货物列车 kPa p 6001= 0.17 0.28 0.37 0.46 0.53 0.60 0.67 0.73 0.78 0.83 0.88 0.93 0.96 kPa p 6001= 0.19 0.32 0.42 0.52 0.60 0.68 0.75 0.83 0.89 0.95 --- --- ---
盘式制动器制动计算
制动计算 制动系统方面的书籍很多,但如果您由于某事需要找到一个特定的公式,你可能很难找到。本文面将他们聚在一起并作一些的解释。他们适用于为任何两轴的车辆,但你的责任就是验证它们。并带着风险使用..... 车辆动力学 静态车桥负载分配 相对重心高度 动态车桥负载(两轴车辆) 车辆停止 制动力 车轮抱死 制动力矩 制动基本原理 制动盘的有效半径 夹紧力 制动系数 制动产生 系统压力 伺服助力 踏板力 实际的减速度和停止距离 制动热 制动耗能 动能 转动能量 势能 制动功率 干式制动盘温升 单一停止式温升 逐渐停止式温升 斜面驻车 车桥负荷 牵引力 电缆操纵制动的损失 液压制动器 制动液量要求 制动基本要求 制动片压缩性 胶管膨胀 钢管膨胀 主缸损失 制动液压缩性 测功机惯性
车辆动力学 静态车桥负载分配 这里:Mf=静态后车桥负载(kg);M=车辆总质量(kg);Ψ=静态车桥负载分配系数注:对于满载和空载的车辆的变化往往是不同的。 相对重心高度 这里: h=重心到地面的垂直距离(m);wb=轴距;X=相对重心高度; 动态车桥负载(仅适用于两轴车辆) 制动过程中车桥负载的变化与哪个车桥制动无关。它们只依赖于静态负载条件和减速度大小。 这里:a=减速度(g);M=车辆总质量(kg);Mfdyn=前桥动态负载(kg); 注:前桥负荷不能大于车辆总质量。后桥负荷是车辆质量和前桥负荷之间的差值,并不能为负数。它可能脱离地面。(摩托车要注意)! 车辆停止 制动力 总制动力可以简单地用牛顿第二定律计算。 这里:BF=总制动力(N);M=车辆总质量(kg);a=减速度(g);g=重力加速度(s/m2);车轮抱死 如果车轮不抱死只能产生制动力,因为轮子滑动摩擦力比滚动摩擦力低得多。在车轮抱死前特定车轴可能的最大制动力计算公式如下: 这里:FA=车桥可能的总制动力(N);Mwdyn=动态车桥质量(kg);g=重力加速度(s/m2);μf=轮胎与地面间摩擦系数; 制动力矩 决定了哪个车轮需要制动来产生足够的制动力,每个车轮扭矩的要求需要确定。对于某些规则,前部和后部制动器之间的分配是确定的。这可能是通过不同的刹车片大小或更容易使
盘式制动器-课程设计
盘式制动器-课程设计
中北大学 课程设计说明书 学生姓名:学号: 学院(系):机电工程学院 专业:车辆工程 题目:夏利汽车盘式制动器方案设计 综合成绩: 职称: 年月日
目录 一、夏利汽车主要性能参数---------------------4 二、制动器的形式-----------------------------5 三、盘式制动器主要参数的确定-----------------7 四、盘式制动器制动力矩的设计计算-------------9 五、盘式制动器制器的校核计算----------------10 1.前轮制动器制动力矩的校核计算 2.摩擦衬片的磨损特性计算 六、经过计算最终确定后轮制动器的参数--------13 七、设计小结--------------------------------13 八、设计参考资料----------------------------13
轿车前轮制动器设计说明书前言汽车制动系是用以强制行驶中的汽车减速或停车、使下坡行驶的汽车车速保持稳定以及使已停驶的汽车在原地(包括在斜坡上)驻留不动的机构。随着高速公路的迅速发展和车速的提高以及车流密度的日益增大,为了保证行车安全,汽车制动系的工作可靠性显得日益重要。也只有制动性能良好、制动系工作可靠的汽车,才能充分发挥其动力性能。本次课程设计根据任务要求只对夏利汽车盘式制动器方案设计。
一、汽车主要性能参数 主要尺寸和参数: (1)、轴距:L=2405mm (2)、总质量:M=900kg (3)、质心高度:0.65m (4)、车轮半径:165mm (5)、轮辋内径:120mm (6)、附着系数:0.8 (7)、制动力分配比:后制动力/总制动力=0.19 (8)、前轴负荷率:60%;即质心到前后轴距离分别为 (9)、轮胎参数:165/70R13; 轮胎有效半径为: 轮胎有效半径=轮辋半径+(名义断面宽度×高宽比) 所以轮胎有效半径 (10)、制动性能要求:初速度为50KM/h时,制动距离为15m。则满足制动性能要求的制动减速度由:计
制动器设计及计算实例汇总
制动扭矩: 领蹄: 111????=K r F M δ 从蹄:222????=K r F M α 求出1??K 、2??K 、1F 、 β θ 2F 就可以根据μ计算出制 动器的制动扭矩。 一.制动器制动效能系数1??K 、2??K 的计算 1.制动器蹄片主要参数: 长度尺寸:A 、B 、C 、D 、r (制动鼓内径)、b (蹄片宽)如图1所示; 角度尺寸: β 、 e (蹄片包角)、α(蹄片轴中心---毂中心连线的垂线和包角 平分线的夹角,即最大单位压力线包角平分线的夹角,随磨擦片磨损而增大); μ为蹄片与制动鼓间磨擦系数。 2.求制动效能系数的几个要点 1)制动时磨擦片与制动鼓全面接触,单位压力的大小呈正弦曲线分布,如图2,max P 位于蹄片轴中心---毂中心连线的垂线方向,其它各点的单位压力 σsin max ?=P P ; 2)通过微积分计算,将制动鼓 与磨擦片之间的单位压 力换算成一个等效压力, 求出等效压力的方向σ 和力的作用点1Z 、2Z (1OZ 、2OZ ),等效力 P 所产生的摩擦力1XOZ (等于μ?P )即扭矩(需建 立M 和蹄片平台受力F 之间的关系);实际计算必须找出M 与F 之间的关系式: ????=K r F M
3)制动扭矩计算 蹄片受力如图3: a. 三力平衡 领蹄:111OE H M ?= 从蹄:222OE H M ?= b. 通过对蹄片受力平衡分析(对L 点取力矩) ()1111G L H b a F ?=+? ()1111/G L b a F H +?= ∴ ()11111/G L OE b a F M ?+?= 111????=K r F M ∴ 111 1G L OE r B A K ? += ?? 同理: 2 22 2G L OE r B A K ? += ?? c. 通过图解分析求出1OE 、2OE 、11G L 、22G L 与制动器参数之间的关系,就可以计算出1??K 、1??K 。 3.具体计算方法: 11-?= ?ρ γ?K l K ; 1'2+?= ?ρ γ?K l K r B A l +=; r C B K 2 2+= 1) 在包角平分线上作辅助圆,求Z. 圆心通过O 点,直径=e e e r sin 2sin 4+?
制动力矩的解释
佐宏自动化工控小学堂 变频器的选型 电机容量的选定 在选定变频器之前,首先进行电机的选定。根据应用计算负载惯量,然后计算电机的必需容量、必需转矩并选定电机。 简易选定方法(所需要的输出的计算法) 这种计算方法就是计算通常的运行状态下电机必需的输出选定电机。因为未包含加减速状态等计算,因此在选定电机时,要在计算值上再留有余量。对于像风扇、传输机及搅拌器等恒定状态下持续进行的应用,可进行简易选定。 ※不适用于下述应用。 要求急剧的上升 频繁地重复运行/停止 动力传输部的惯量大 动力传输部的效率低 直线运动的情况下:恒定功率-Po[kW] 旋转运动的情况下:恒定功率-Po[kW] 详细选定方法(R.M.S计算法) 计算为了实现应用的动作模式的有效转矩及最大转矩,然后再选择电机的一种方法。可进行与动作形式相对应的详细的电机选定。 转换到电机轴的惯量的计算 应用以下所示的惯量的计算公式,计算所有的零部件的惯量,然后换算成换算到电机轴的惯量。 转换到电机轴的转矩及有效转矩的计算 根据计算出的换算到电机轴负载惯量及电机转子惯量计算加速转矩,根据负载上所施加的外力及摩擦力计算负载转矩,然后计算电机动作所必需的复合转矩。 加速转矩 换算到电机轴负载转矩(外力?摩擦) 复合转矩及有效转矩的计算 可应用伺服电机的电机选定软件,进行上述的换算到电机轴的惯量的计算及有效转矩?最大转矩的计算。敬请使用。 电机的选定
将上述的计算结果应用到下述的计算公式中,计算有效转矩?最大转矩。 将2个计算结果中值大的一个选定为电机容量。 在选定电机时,要用比所计算的容量高、留有误差部分的容量来进行设定。 与有效转矩相当的容量 电机容量=[kW]=1.048NTRMS10-4 N:最大转数(r/min) 可提供最大转矩的电机容量 电机容量=[kW]=1.048NTMAX10-4/1.5 N:最大转数(r/min) 变频器容量的选定 选定用按照“电机的选定”的结果选定的电机能使用的变频器。从根本上讲,请选定与所选定的电机容量相适合的最大适用电机容量的变频器。选定变频器后,确认是否满足以下项目,如不能满足,则选定大1级容量的变频器再次进行确认。 电机额定电流≤变频器额定输出电流 应用程序上的连续最大转矩输出时间≤1分钟 变频器过载耐量为“额定输出电流的120%、1分钟”时,请用0.8分钟进行确认。 使用带PG的矢量控制在转数0(r/min)情况下所必需要保持转矩,或者在低频(10Hz以下)情况下频繁地需要额定150%以上的转矩时,请使用比变频器的选定结果大1级的变频器。. 制动电阻选型 制动电阻的必要性 如应用中减速时及下降时所产生的再生能量过大,则有变频器内部的主电路电压上升导致损坏的可能。 因为通常变频器中内置有过电压保护功能,检测出主电路过电压(OV)后则停止,不会造成损坏。但是,因在检测出异常后电机会停止,所以就难于进行稳定的持续运行。 有必要应用制动电阻器/制动电阻器单元/制动单元,将再生能量释放到变频器外部 再生能量是… 连接在电机上的负载,在旋转时有动能、在高位置时有势能。电机减速、或负载减小时,该能量会返回到变频器。这种现象称为再生,该能量即称为再生能量。 制动电阻的避免方法 避免制动电阻连接的方法有以下的方法。
制动力计算方法
《机动车运行安全技术条件》(GB7258-2004)有关制动方面的: 1.1 台试检验制动性能 1.1.1 行车制动性能检验 1.1.1.1 汽车、汽车列车在制动检验台上测出的制动力应符合表 6 的要求。对空载检验制 动力有质疑时,可用表 6 规定的满载检验制动力要求进行检验。 摩托车及轻便摩托车的前、后轴制动力应符合表 6 的要求,测试时只允许乘坐一名驾 驶员。 检验时制动踏板力或制动气压按7.13.1.3 的规定。 表 6 台试检验制动力要求 1.1.1.2 制动力平衡要求(两轮、边三轮摩托车和轻便摩托车除外) 在制动力增长全过程中同时测得的左右轮制动力差的最大值,与全过程中测得的该轴左 右轮最大制动力中大者之比,对前轴不应大于20% ,对后轴(及其它轴)在轴制动力不小 于该轴轴荷的60% 时不应大于24%;当后轴(及其它轴)制动力小于该轴轴荷的60% 时,在制动力增长全过程中同时测得的左右轮制动力差的最大值不应大于该轴轴荷的8% 。 依据国标要求,对前轴以外的制动力平衡计算分两种情况: 1、当该轴制动制动率 >= 60%时,过程差最大差值点的两个力分别 为f1和f2,如果f1 >= f2 不平衡率 = (f1 –f2)/f1 * 100 ; 如果f1 < f2不平衡率 = (f2 –f1)/f2 * 100 2、当该轴制动制动率 < 60%时,过程差最大差值点的两个力分别
为f1和f2,如果f1 >= f2 不平衡率 = (f1 –f2)/轴重 * 100 ;如果f1 < f2不平衡率 = (f2 –f1)/轴重 * 100 注意:以上为简约的计算,较为准确的计算要注意单位之间的换算:轴重是kg,制动力的单位是10N 例如: 轴重最大左最大右差值左差值右制动率不平衡率 2074 543 508 543 508 50.7 1.7 二轴不平衡率( 543-508)*10/(2074*9.8)*100= 1.722% 有关制动台仪表 制动台仪表的不平衡率算法说明书没有给出,不清楚其算法,对于前轴有可能是对的,对于后轴等仪表算法可定是错误的,制动台本身不能得到车辆的轴重,也就不能判断制动率是否 >=60,也就不能得出不平衡率。
盘式制动器设计
目录 绪论 (1) 一、设计任务书 (1) 二、盘式制动器结构形式简介 .................... 错误!未定义书签。 2.1、盘式制动器的分类....................... 错误!未定义书签。 2.2、盘式制动器的优缺点..................... 错误!未定义书签。 2.3、该车制动器结构的最终选择............... 错误!未定义书签。 三、制动器的参数和设计 ........................ 错误!未定义书签。 3.1、制动盘直径 ............................ 错误!未定义书签。 3.2、制动盘厚度 ............................ 错误!未定义书签。 3.3、摩擦衬块的内半径和外半径............... 错误!未定义书签。 3.4、摩擦衬块面积 .......................... 错误!未定义书签。 3.5、制动轮缸压强 .......................... 错误!未定义书签。 3.6、摩擦力的计算和摩擦系数的验算........... 错误!未定义书签。 3.7、制动力矩的计算和验算................... 错误!未定义书签。 3.8、驻车制动计算 .......................... 错误!未定义书签。 四、制动器的主要零部件的结构设计 .............. 错误!未定义书签。 4.1、制动盘 ................................ 错误!未定义书签。 4.2、制动钳 ................................ 错误!未定义书签。 4.3、制动块 ................................ 错误!未定义书签。 4.4、摩擦材料 .............................. 错误!未定义书签。