四足仿生机器人足端工作空间的分析
四足仿生机器人足端工作空间的分析
作者:赵文涛;刘志忠
作者机构:西北工业大学机电学院,陕西西安710072;西北工业大学机电学院,陕西西安710072
来源:机械设计与制造工程
ISSN:1672-1616
年:2011
卷:040
期:013
页码:19-22
页数:4
中图分类:TP242
正文语种:chi
关键词:四足仿生机器人;工作空间求解;蒙特卡罗方法;MATLAB
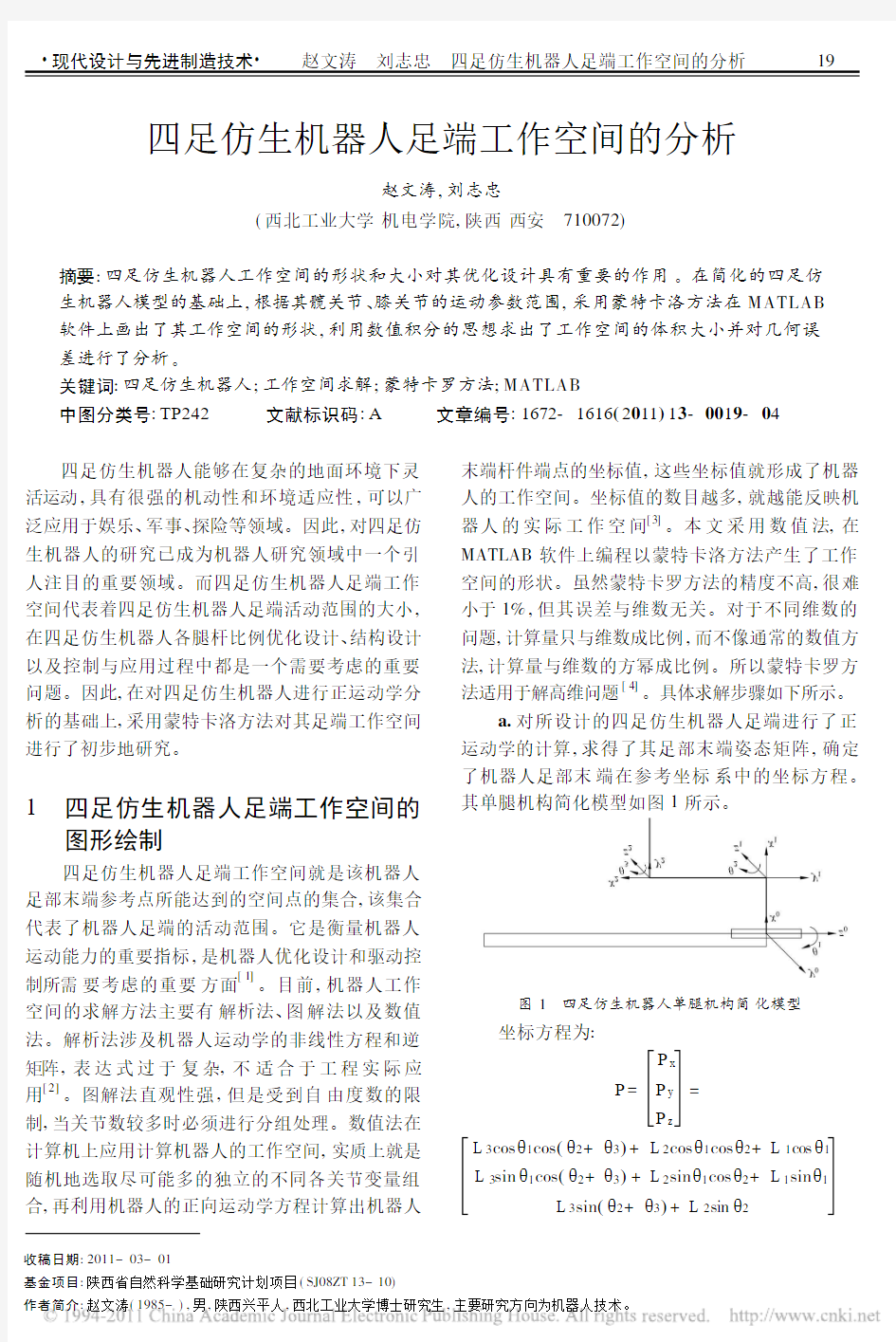
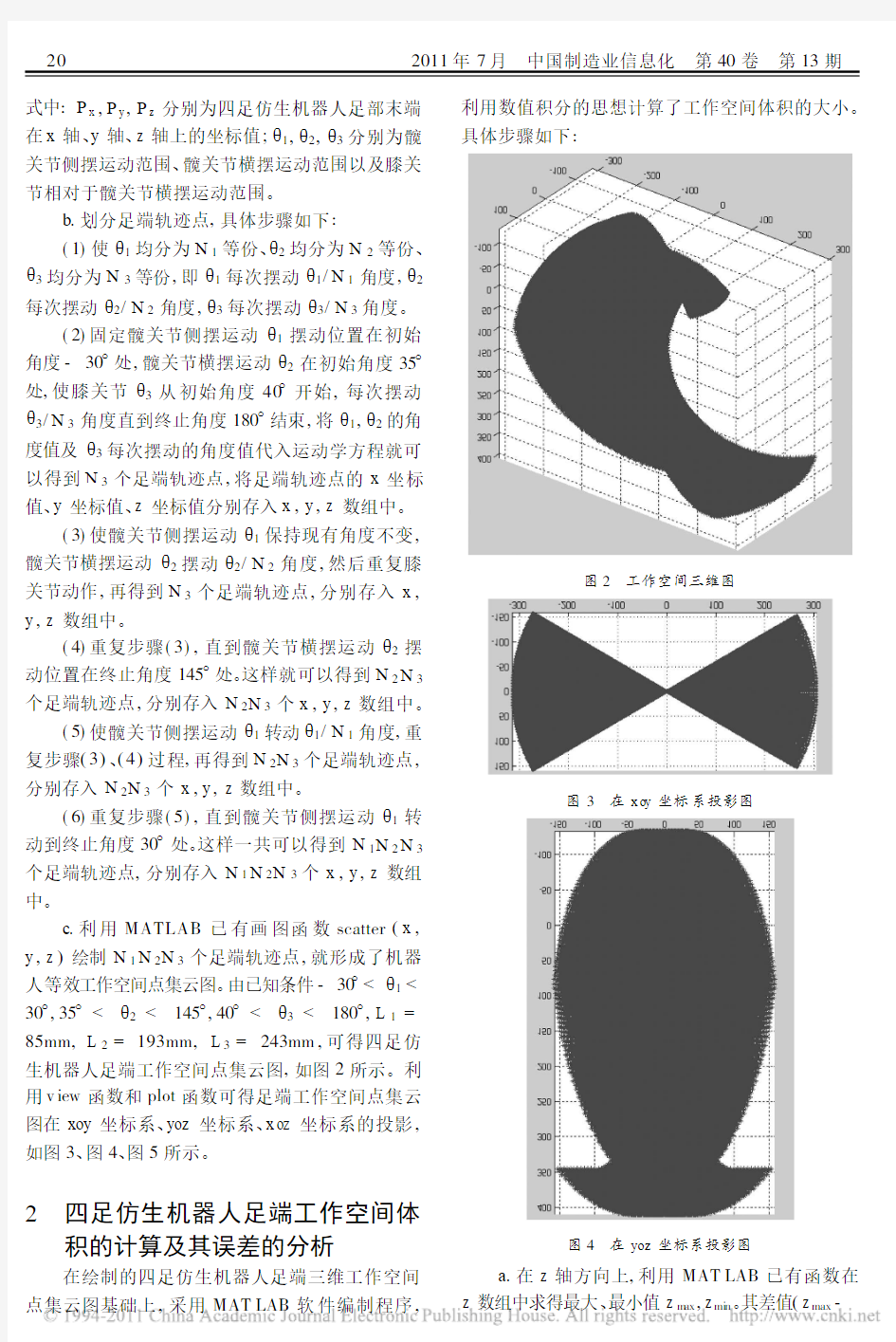
摘要:四足仿生机器人工作空间的形状和大小对其优化设计具有重要的作用。在简化的四足仿生机器人模型的基础上,根据其髋关节、膝关节的运动参数范围,采用蒙特卡洛方法在MATLAB软件上画出了其工作空间的形状,利用数值积分的思想求出了工作空间的体积大小并对几何误差进行了分析。
相关主题