(完整版)雷达系统原理框图及编程思想.doc
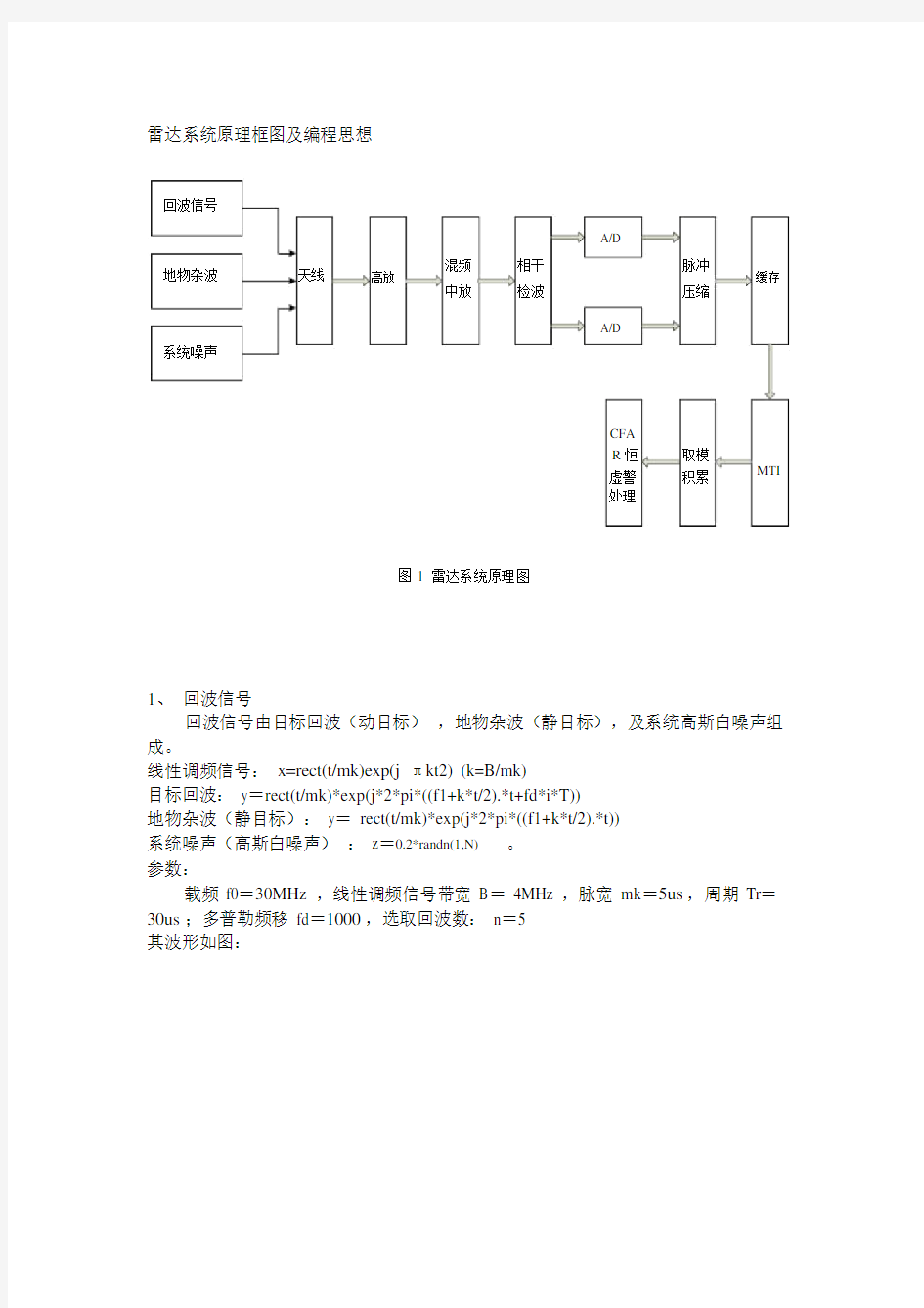
雷达系统原理框图及编程思想
回波信号
A/D
地物杂波天线
混频相干脉冲
高放
检波
缓存中放压缩
A/D
系统噪声
CFA
R恒取模
MTI
虚警积累
处理
图 1雷达系统原理图
1、回波信号
回波信号由目标回波(动目标),地物杂波(静目标),及系统高斯白噪声组成。
线性调频信号: x=rect(t/mk)exp(j πkt2) (k=B/mk)
目标回波: y=rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t+fd*i*T))
地物杂波(静目标): y= rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t))
系统噪声(高斯白噪声): z=0.2*randn(1,N)。
参数:
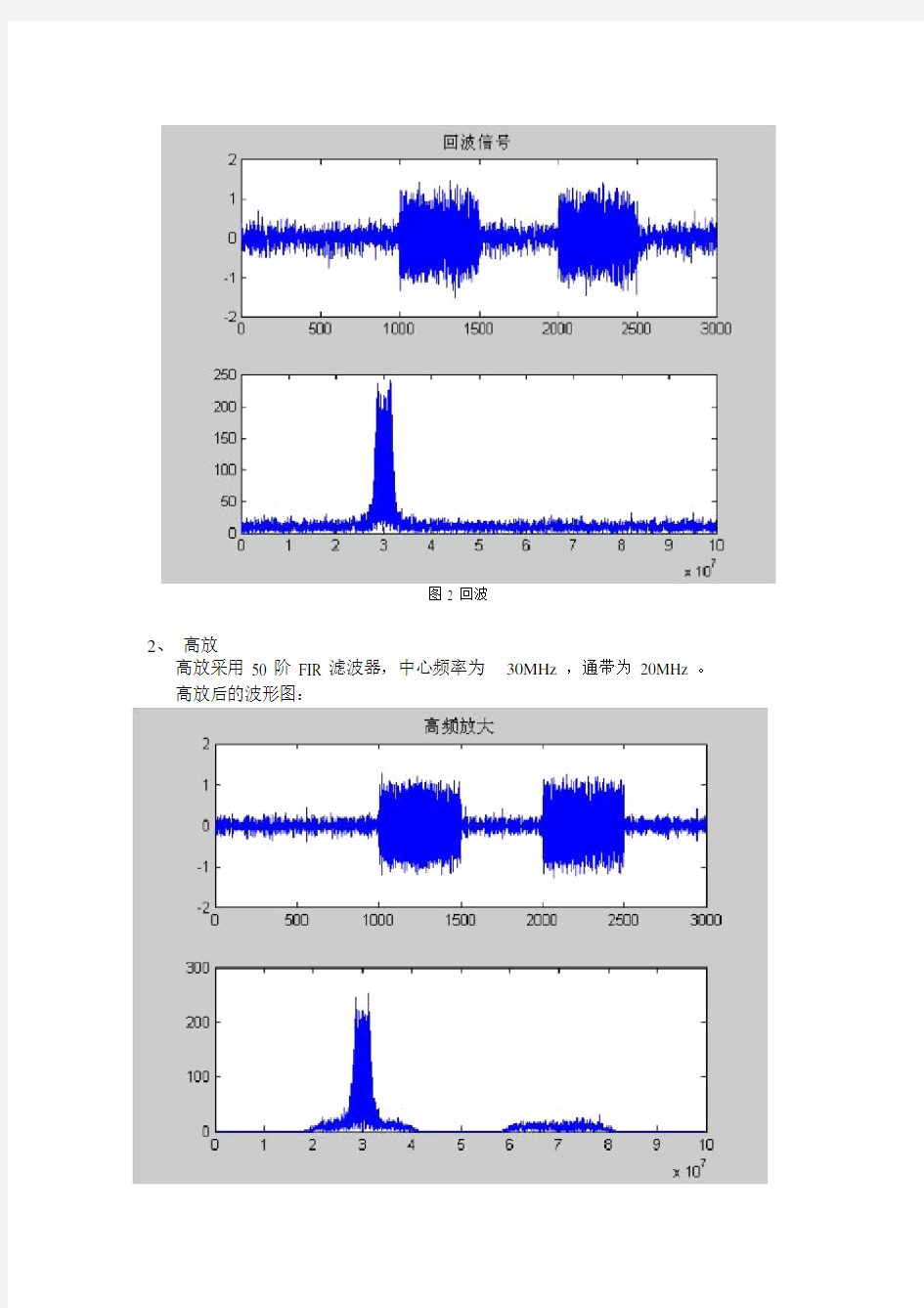
载频 f0=30MHz ,线性调频信号带宽 B= 4MHz ,脉宽 mk=5us,周期 Tr=30us;多普勒频移 fd=1000,选取回波数: n=5
其波形如图:
图 2 回波
2、高放
高放采用 50 阶 FIR 滤波器,中心频率为30MHz ,通带为 20MHz 。
高放后的波形图:
图 3 高放后时域频域图形
3、混频+中放
混频的参考频率为20MHz
中放采用 50 阶 FIR 滤波器,中心频率为10MHz ,通带为 4MHz 。
图 4 混频+中放后时域频域图形
4、相干检波
参考源的时钟频率f0=10MHz;
I路: I=0.5*X*cos( Φ(t)) ; Q 路: Q=0.5*X*sin( Φ(t));
原理图:
I路
sin2 πf0t LDF
中放之后
的信号
Q路
cos2πf0t LDF
波形图:
图 5 相位检波后I、 Q 两路时域图
5、 A/D 转换
采样频率为 5MHz 。
x0=(Vmax/2a)*int{xi*2a / Vmax }; 其中, a 为 AD 位数
图 6 AD 采样后后I 、 Q 两路时域图
6、脉冲
采用射信号作匹配波。
匹配波的脉冲响:
H(k)=X*(k)exp(-j2 πkN), k=0,1,2? N
性信号:
x(n)=rect(n/N)exp(j πkn2) (k=B/tao);
图 7 脉冲压缩时域图8、 MTI
MTI 采用一次消:
y(n)=x(n)-x(n-1); n=1,2,3?N
图 8 MTI
9、取模+累
20 个回波信号取模并累 ,此是相参累, y(n)=
|∑x(n)| n=1,2, 3 ? N
图 9 取模加积累
10、CFAR (恒虚警检测)
恒虚警处理时利用的是前8 后 8 的处理方法。
这里设 p= 0.0001则由p f p( x)dx 式得到检测电平= 4.29
输入
对数运算N/2X0N/2
+
输出
反对数运算
—
(N/2) ∑Xi(N/2) ∑Xi
选大
图 10 CFAR