直流无刷电机的PWM仿真分析

直流无刷电机的PWM仿真分析
MotorSolve BLDC模块的一个突出特点是动态仿真能力,包括使用理想电源或PWM驱动电路的分析。本例中,展示了PWM驱动电路下对直流无刷电机的仿真分析。
Simulating Pulse Width Modulation with a Brushless DC
Motor
MotorSolve BLDC contains an extensive list of post-processing options that allow the user to analyze models using finite element, analytical and hybrid approaches. One of MotorSolve BLDC's salient features is its dynamical simulation capabilities. These include simulation options using an ideal driver (transient analysis) and that using PWM drive circuits. In this gallery, some examples of simulations using the PWM drive are presented. The figure shown here is an example of a wye-connected 3 phase drive circuit used in such simulations. PWM capabilities of MotorSolve BLDC include delta connected circuits and sinusoidal and six-step drive types. Also, switching losses are taken into account in the simulations.
METHODS and RESULTS
4-POLE 12-SLOT MOTOR with PHASE A WINDING
Consider a 4 pole 12 slot motor with phase A winding, as shown on the figure to the left. The examples presented below are for this model.
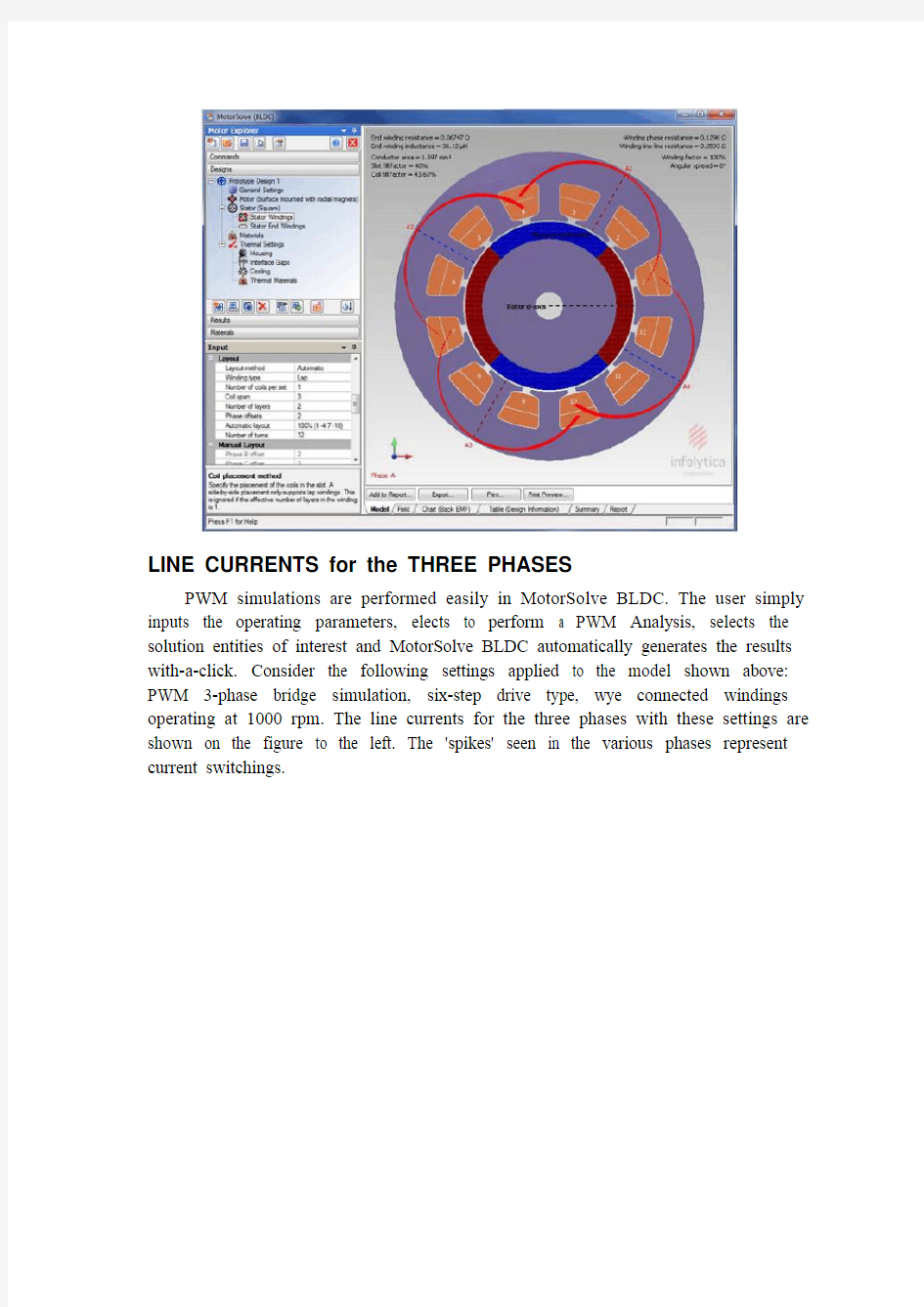
LINE CURRENTS for the THREE PHASES
PWM simulations are performed easily in MotorSolve BLDC. The user simply inputs the operating parameters, elects to perform a PWM Analysis, selects the solution entities of interest and MotorSolve BLDC automatically generates the results with-a-click. Consider the following settings applied to the model shown above: PWM 3-phase bridge simulation, six-step drive type, wye connected windings operating at 1000 rpm. The line currents for the three phases with these settings are shown on the figure to the left. The 'spikes' seen in the various phases represent current switchings.
INSTANTANEOUS BACK EMF on PHASE A at VARIOUS ROTOR SPEEDS
A number of interesting results are available to the designer from the PWM simulations including torque, back emf, line and winding voltages, power input and output, flux linkage, etc. The user may generate instantaneous, time-averaged as well as harmonic contents of these entities. For example, the instantaneous back emf on phase A at various rotor speeds are shown on this figure. As expected, the back emf is seen to scale appropriately with rotor speeds.
HARMONIC COMPONENTS of the BACK EMF
Harmonic components are also available. The harmonic components of the back emf at 1000 rpm for one of the phases is shown here.
TIME-AVERAGED TORQUE VS SPEED
The motor designer may be interested in how outputs vary as a function of rotor speeds, advance angles or for various prototypes. MotorSolve BLDC's PWM capabilities allow the user to make such comparisons readily. Consider for example, the time-averaged torque versus speed variation for the motor above. As the rotor speed and consequently the back emf increases, the torque generated decreases as the rail voltage becomes comparable to the back emf. This is captured clearly in the results shown here.
TIME-AVERAGED TORQUE VS ADVANCE ANGLE at VARIOUS ROTOR SPEEDS
Consider now the time-averaged torque versus advance angle at various rotor speeds. As the angle between the winding currents and the q-axis increases, the torque generated is seen to decrease at low rotor speeds and increase initially for higher rotor speed values (due to field weakening) before following the same trend as that for low rotor speeds. Hence, to generate the same level of torque over a wide range of rotor speeds, increasing the advance angle is seen to help.
SUMMARY
These are some basic examples of the type of analysis that may be done in MotorSolve BLDC using PWM simulations. MotorSolve BLDC is capable of generating other many interesting PWM simulation results that complement its extensive post-processing capabilities.
对转式永磁无刷直流电机的建模与仿真_李延升
第44卷 2011年 第4期 4月 M ICR OM OTOR S V ol 44.N o 4 A pr 2011 收稿日期:2010-04-07 基金项目:西北工业大学研究生创业种子基金项目 作者简介:李延升(1983),男,博士研究生,研究方向为电机与电器。E-m a i:l liyanchao mm@yahoo .co https://www.360docs.net/doc/8e6850700.html, 窦满峰(1967),男,教授,博导,研究方向为电机与电器。 对转式永磁无刷直流电机的建模与仿真 李延升,窦满峰,雷金莉 (西北工业大学,西安 710072) 摘 要:该文根据对转式与普通永磁无刷直流电机区别,建立了对转永磁无刷直流电机的数学模型,采用M atlab /S i m u li nk 仿真软件建立了电机的仿真模型,并对电机带螺旋桨负载进行仿真分析。仿真结果表明:仿真波形与理论分析基本一致,验证该模型的有效性,为对转式永磁无刷直流电机的控制算法研究提供了工具。关键词:对转式;无刷直流电机;建模;仿真 中图分类号:TM 36+1 文献标志码:A 文章编号:1001-6848(2011)04-0019-04 M odeli ng and Si m ul ati on of the Contra -rotati ng BLDC M otor Control Syste m LI Yansheng ,DOU M anfeng ,LE I Jinli (N ort h w estern P oly technical University ,X i an 710072,China ) Abst ract :Contra -rotati n g per m anentm agnet br ush less DC m otor uses per m anentm agnet as the ou ter rotor , the ar m ature w inding as the i n ner rotor ,both inner and outer rotor i n teracts on the reverse ro tation by m eans of t h e m agne tic force .Based on the ana l y sis of the m athe m atica lm odel o f contra -rotating BLCDM,the mode l of BLDC M w as estab lished by the m odu lar design in M atlab /S i m ulink ,and the si m ulati o n experi m ent w as acco m p li s hed w ith a pr ope ller loads .The si m ulati o n resu lts are consistentw ith t h e theory analysis ,and the m ethod is va li d .The para m eter of th ism ethod is suitable for verif y ing the reasonability o f other contr o l algo -rit h m s and provides a ne w w ay fo r further research o f the con tra -rotati n g BLDC M.K ey w ords :contra -rotati n g ;BLCDM;m odeli n g ;si m u lati o n 0 引 言 对转式无刷直流电机直接驱动对转螺旋桨,在水下航行器中广泛应用 [1] 。它与普通永磁无刷直流 电机比较,除永磁体部分可以旋转,电枢部分也相对静止部分旋转,即电磁转矩驱动两个转子朝相反的方向旋转。以电枢部分为参照系来观察永磁体部分的旋转行为,可以发现对转式永磁无刷直流电机与普通的永磁无刷直流电动机的电流方程、电压平衡方程一致,数学模型中仅仅多了一个运动方程 [2] 。 根据这一思路,本文根据对转永磁无刷直流电机的数学模型,在S i m u li n k 软件中建立仿真模型,并对其进行仿真分析。 1 对转式BLDC M 数学模型 无刷直流电机的基本物理量有电磁转矩、电枢电流、反电动势和转速等 [3] ,这些物理量的计算与 电机的气隙磁场分布、绕组形式有十分密切的关系。 对于稀土永磁无刷直流电动机,其气隙磁场波形可以为方波也可以为正弦波或梯形波,这与选用电机的磁路结构和永磁体的形状有关。本文研究的对转式永磁无刷直流电机,其气隙磁场波形为方波,绕组中感应电动势为梯形波,采用方波电流驱动。在分析和仿真控制系统时,可直接利用电机原有的相变量来建立数学模型,既方便,又能获得准确结果。 假定永磁无刷直流电机工作在二相导通星形三相六状态下,工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称,那么三相绕组的电压平衡方程式为:U a U b U c =R 000R 000R i a i b i c +L -M 000L -M 00 L -M d i a d t d i b d t d i c d t +e a e b e c (1)
无刷直流电机的建模与仿真
龙源期刊网 https://www.360docs.net/doc/8e6850700.html, 无刷直流电机的建模与仿真 作者:秦超龙 来源:《电脑知识与技术》2013年第05期 摘要:该文在分析无刷直流电机(BLDCM)数学模型和工作原理的基础上,利用Matlab 软件的Simulink和PSB模块,搭建无刷直流电机及整个控制系统的仿真模型。该BLDCM控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪PWM,速度环采用PI控制。仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。 关键词:BLDCM控制系统;无刷直流电机;数学模型;MATLAB;电流滞环 中图分类号: TP391 文献标识码:A 文章编号:1009-3044(2013)05-1172-03 随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。 直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。 通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用Simulink中所提供的各种模块,构建出BLDCM控制系统的仿真模型,从而实现只利用Simulink中的模块建立BLDCM控制系统仿真模型。通过对实例电机的仿真,可以得到各类仿真波形,从而验证了仿真模型的有效性和正确性,数学模型的有效性及控制系统的合理性也得到了验证。 1 无刷直流电机的数学模型 本文采用两相导通三相六状态的无刷直流电动机来分析无刷直流电动机的数学模型[2-3]。 无刷直流电动机的感应电动势为梯形波,电流为方波。考虑到分析的方便、无刷直流电动机的特点,该文直接利用电动机本身的相变量建立物理模型,假定:
无刷直流电机数学模型(完整版)
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
基于自抗扰控制(ADRC)的无刷直流电机控制与仿真
一、研究意义 1.研究意义 由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。目前, 基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的P ID控制。PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后等特性, 很难用精确的数学模型描述, 这就使得基于精确数学模型的传统控制方法面临严重的挑战。另外, 经典P ID控制需要根据运行工况的不同而调节控制器参数, 无刷直流电机又具有数学模型复杂,非线性等特点,这给现场调试增加了难度。 2.国内外研究状况及发展 (1)无刷直流电机基本控制方法 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。 直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。它除了电机电枢、永磁励磁两部分外,还带有传感器。电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。 直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。 电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。换流器(inverter)一般由6个功率晶体管(V1~V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。电机驱动电路如图?所示。 图1 无刷直流电机的控制电路
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真 0引言 无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。 1无刷直流电机仿真模型 本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图 以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。 图2 无刷直流电机控制系统仿真模型框图 1.1电动机本体模块 在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,
i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。 图3 电机本体模块 1.反电势求取模块 本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
基于STM32的直流电机PWM调速控制
电动摩托车控制器中的电机PWM调速 摘要:随着“低碳”社会理念的深入,新型的电动摩托车发展迅速,逐渐成为人们主要的代步工具之一,由于直流无刷电机的种种优点,在电动摩托车中也得到了广泛应用,因此,本文控制部分主要介绍一种基于STM32F103芯片的新型直流无刷电机调速控制系统,这里主要通过PWM技术来进行电机的调速控制,且运行稳定,安全可靠,成本低,具有深远的意义。 1.总体设计概述 1.1 直流无刷电机及工作原理 直流无刷电机(简称BLDCM),由于利用电子换向取代了传统的机械电刷和换向器,使得其电磁性能可靠,结构简单,易于维护,既保持了直流电机的优点又避免了直流电机因电刷而引起的缺陷,因此,被广泛应用。另外,由于直流无刷电机专用控制芯片价格昂贵,本文介绍了一种基于STM32的新型直流无刷电机控制系统,既可降低直流无刷电机的应用成本,又弥补了专用处理器功能单一的缺点,具有重要的现实意义和发展前景。 工作原理:直流无刷电机是同步电机的一种,其转子为永磁体,而定子则为三个按照星形连接方式连接起来的线圈,根据同步电机的原理,如果电子线圈产生一个旋转的磁场,则永磁体的转子也会随着这个磁场转动因此,驱动直流无刷电机的根本是产生旋转的磁场,而这个旋转的磁场可以通过调整A、B、C三相的电流来实现,其需要的电流如图1所示 随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。 1.2 总体设计方案 总体设计方案的硬件部分详细框图如图1所示。
无刷直流电机的数学模型
2.2 无刷直流电机的数学模型 在本文中,以两极三相无刷直流电机为例来说明其数学建立模型的过程。电机定子绕组为Y 型联接,转子采用内转子结构,3个霍尔元件在空间相互间隔120°对称放置。在此结构基础上,假设电机的磁路不饱和,不计涡流损耗、磁滞损耗及电枢反应;忽略齿槽效应;驱动系统中,整流逆变电路的功率管和续流二极管均为理想开关器件错误!未找到引用源。。 2.2.1 定子电压方程 由以上的假设条件,无刷直流电机每相绕组的相电压由电阻压降和绕组感应电势两部分组成,其定子电压平衡方程为 ???? ? ?????+????????????????????+????????????????????=??????????c b a c b a c cb ca bc b ba ac ab a c b a c b a c b a e e e i i i L L L L L L L L L dt d i i i R 0 0R 000R U U U (2-1) 式(2-1)中,a e 、b e 、c e 为各相定子反电动势,a i 、b i 、c i 为各相定子电流,a U , b U , c U 为定子各相电压,a R ,b R ,c R 为定子各相绕组电阻,a L ,b L ,c L 为定子各相绕组自感,ab L ,ac L ,ba L ,bc L ,ca L ,cb L 为定子间各相绕组的互感,由于无刷直流电机的转子为永磁体。假设无刷直流电机三相绕组对称,忽略磁阻间的影响,则可以认为定子各相绕组间互感为常数,即s c b a L L L L ===, R R R R c b a ===,M L L L L L L cb ca bc ba ac ab ======。则式(2-1)改写为 ???? ??????+????????????????? ???+????????????????????=??????????c b a c b a s s s c b a c b a e e e i i i L M M M L M M M L dt d i i i R 0 0R 000R U U U (2-2) 由0i i i c b a =++,0Mi Mi Mi c b a =++,代入式(2-2),整理可得 ?? ?? ??????+????????????????????+????????????????????=??????????c b a c b a c b a c b a e e e i i i L 000L 000L dt d i i i R 0 0R 000R U U U (2-3) 式(2-3)中M L L s -=。图2-3虚线框部分所示即为电子电枢部分等效电路。 2.2.2 反电势动方程 在物理学当中,在磁场中单根导体切割磁力线运动产生的电动势e 为 Blv e = (2-4) 其中,B 、l 分别为磁场强度和导体在磁场中运动有效长度,v 为导体在垂直于
直流电机PWM调速
直流电机转速的PWM控制测速 王鹏辉 姬玉燕
摘要 本设计采用PWM的控制原理来完成对直流电机的正转、反转以及其加速、减速过程的控制,在此过程中是通过单片机的定时器加上中断的方式产生不同时长的高低电压脉冲信号来完成。并通过霍尔传感器对直流电机的转速进行测定,最后将实时测定的转速数值1602液晶屏上。 关键词: PWM控制直流电机霍尔传感器 1602液晶显示屏 L298驱动 一、设计目的: 了解直流电机工作原理,掌握用单片机来控制直流电机系统的硬件设计方法,熟悉直流电机驱动程序的设计与调试,能够熟练应用PWM方法来控制直流电机的正反转和加减速,提高单片机应用系统设计和调试水平。 1.1系统方案提出和论证 转速测量的方案选择,一般要考虑传感器的结构、安装以及测速范围与环境条件等方面的适用性;再就是二次仪表的要求,除了显示以外还有控制、通讯和远传方面的要求。本说明书中给出两种转速测量方案,经过我和伙伴查资料、构思和自己的设计,总体电路我们有两套设计方案,部分重要模块也考虑了其它设计方法,经过分析,从实现难度、熟悉程度、器件用量等方面综合考虑,我们才最终选择了一个方案。下面就看一下我们对两套设计方案的简要说明。 1.2 方案一:霍尔传感器测量方案 霍尔传感器是利用霍尔效应进行工作的?其核心元件是根据霍尔效应原理制成的霍尔元件。本文介绍一种泵驱动轴的转速采用霍尔转速传感器测量。霍尔转速传感器的结构
原理图如图3.1, 霍尔转速传感器的接线图如图3.2 。 传感器的定子上有2 个互相垂直的绕组A 和B, 在绕组的中心线上粘有霍尔片HA 和HB ,转子为永久磁钢,霍尔元件HA 和HB 的激励电机分别与绕组A 和B 相连,它们的霍尔电极串联后作为传感器的输出。 图3.1 霍尔转速传感器的结构原理图 方案霍尔转速传感器的接线图 缺点:采用霍尔传感器在信号采样的时候,会出现采样不精确,因为它是靠磁性感应才采集脉冲的,使用时间长了会出现磁性变小,影响脉冲的采样精度。 1.3方案二:光电传感器 整个测量系统的组成框图如图3.2所示。从图中可见,转子由一直流调速电机驱
无刷直流电机控制系统的Proteus仿真
无刷直流电机控制系统的Proteus仿真-机械制造论文 无刷直流电机控制系统的Proteus仿真 王家豪潘玉民 (华北科技学院电子信息工程学院,河北三河101601) 【摘要】基于Proteus软件仿真平台,提出了一种对无刷直流电机(BLDCM)控制系统实现了转速闭环控制的方案。该系统以AT89S52单片机为核心,采用IR2101芯片驱动及AD1674实现速度,并利用数码动态显示转速,通过增量式PID调节对无刷直流电机实现转速闭环稳定控制。仿真结果表明该系统具有可控调速、显示直观等特点。 关键词无刷直流电机(BLDCM);Proteus;增量式PID;闭环控制 0引言 无刷直流电机(BLDCM)既有直流有刷电机的特性,又有交流电机无刷的优点,在快速性、可控性、可靠性、输出转矩、结构、耐受环境和经济性等方面具有明显的优势,近年来得到迅速推广[1]。BLDCM是一种用电子换向取代机械换向的新一代电动机,与传统的直流电动机相比,它具有过载能力强,低电压特性好,启动电流小等优点。近年来在工业运用方面大有取代传统直流电动机的趋势,所以研究无刷直流电机的驱动控制技术具有重要的实际应用价值。 本设计采用增量式PID控制策略控制无刷电动机,并在Proteus平台上进行转速闭环系统仿真。搭建了无刷直流电动机转速控制系统的仿真模型,基于80C51控制核心,采用keil C51软件编写C程序。 1系统硬件组成 控制系统的硬件组成如图1所示。采用Atmel公司的AT89S52单片机为系统
控制核心、IR2101驱动的MOSFET三相桥式逆变器、无刷直流电机、A/D转换转速检测、闭环PID控制、按键检测、档位和转速显示等部分组成。 2控制系统核心及外围电路 系统核心AT89S52单片机最小系统及按键电路如图2所示。 AT89S52芯片是8位单片机,具有廉价、实用及运算快等优点,它有两个定时器,两个外部中断接口,24个I/O口,一个串行口。 单片机首先进行初始化,将显示部分(转速显示、档位显示)送显“0”然后通过中断对按键进行检测当检测到启动键按下时,系统启动,控制核心输出初始控制码,与此同时通过AD转换器读取当前的实时转速,一方面用于显示,另一方面将当前转速与设定转速送入PID控制环节然后输出下一时刻的控制码。 在本次设计中使用80C51的外部中断接口0(INT0)作按键检测(见图3),通过四个与门,当有任何一个按键按下去时tap端都会出现低电平引发中断。
基于单片机的直流电机PWM调速控制系统的设计
基于单片机的直流电机PWM调速控制系统的设计 第一章:前言 1.1前言: 直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。 近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。 采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。而用PWM技术后,避免上述的缺点,实现了数字式控制模拟信号,可以大幅度减低成本和功耗。并且PWM调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。 随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。 1.2本设计任务: 任务: 单片机为控制核心的直流电机PWM调速控制系统 设计的主要内容以及技术参数: 功能主要包括: 1)直流电机的正转; 2)直流电机的反转; 3)直流电机的加速; 4)直流电机的减速; 5)直流电机的转速在数码管上显示; 6)直流电机的启动; 7)直流电机的停止; 第二章:总体设计方案 总体设计方案的硬件部分详细框图如图一所示。
无刷直流电机控制系统的设计及仿真毕业设计
目录 1 前言 (1) 1.1 无刷直流电机的发展 (1) 1.2 无刷直流电机的优越性 (1) 1.3 无刷直流电机的应用 (2) 1.4 无刷直流电机调速系统的研究现状和未来发展 (2) 2 无刷直流电机的原理 (4) 2.1 三相无刷直流电动机的基本组成 (4) 2.2 无刷直流电机的基本工作过程 (5) 2.3 无刷直流电动机本体 (6) 2.3.1 电动机定子 (6) 2.3.2 电动机转子 (7) 2.3.3 有关电机本体设计的问题 (8) 3 转子位置检测 (9) 3.1 位置传感器检测法 (9) 3.2 无位置传感器检测法 (10) 4 系统方案设计 (12) 4.1 系统设计要求 (12) 4.1.1 系统总体框架 (12) 4.2 主电路供电方案选择 (13) 4.3 无刷直流电机电子换相器 (14)
4.3.1 三相半控电路 (14) 4.3.2 三相全控电路 (15) 4.4 无刷直流电机的基本方程 (16) 4.5 逆变电路的选择 (19) 4.6 基于MC33035的无刷直流电动机调速系统 (19) 4.6.1 MC33035无刷直流电动机控制芯片 (19) 4.6.2 基于MC33035的无刷直流电动机调速系统设计 (21) 5 无刷直流电机调速系统的MATLAB仿真 (23) 5.1 电源、逆变桥和无刷直流电机模型 (24) 5.2 换相逻辑控制模块 (25) 5.3 PWM调制技术 (30) 5.3.1 等脉宽PWM法 (32) 5.3.2 SPWM(Sinusoidal PWM)法 (32) 5.4 控制器和控制电平转换及PWM发生环节设计 (32) 5.5 系统的仿真、仿真结果的输出及结果分析 (34) 5.5.1 起动,阶跃负载仿真 (34) 5.5.2 可逆调速仿真 (36) 6 总结和体会 (38)
无刷直流电动机启动过程的Matlab仿真
万方数据
张会焱:无刷直流电动机启动过程的Madab仿真 式中.电磁转矩为 电磁功率为 乙=告 乙=乞之+%‘+ec‘ (8) (9) 2运行状态分析 在本文中,无刷直流电动机电枢绕组与逆变器的联接形式采用三相导通三相星形六状态的方式。 如图2所示。假设在任意时刻开关线路的上桥臂和下桥臂有一个或者两个晶体管导通,即三相绕组的通电顺序依次为A+B屯+、A+B屯一、A+B+c一、A—B+c一、A’B屯+、A。B屯?(180。导通型)字母上标为加号代表电流流进绕组,字母上标为负号代表电流流出绕组。当电流为A+B_c+通电时,转子磁极位置如下图3中a所示,Fs为定子绕组合成磁动势,FN为转子永磁体磁动势,0为转子磁极位置角(O=o一训3)。当永磁体位于起始位置时.A、C两相电流流进绕组,而B相电流流出绕组。此时电流流通 的路径为:电源正极一V。管—呱相绕组一B相绕组—-V6管一电源负极;还有,电源正极一Vs管—屺相绕组一B相绕组—V。管一电源负极。FS和R相互作用,使转子 顺时针旋转。当转子顺时针旋转训3到达终止位置时,开始进入电流为A+B屯‘通 电的状态,如图3中b所示。此时电流流通的路径为:电源正极一V,管一A相绕 组一B相绕组一V6管一电源负极;还有,电源正极一VI管—A相绕组川相绕 组一V:管一电源负极。Fs和FN相互作用,使转子继续顺时针旋转。如此六种状态循 环往复。阁在电角度0的各个区间内V。_6管的导通顺序如表l。 一个周期2霄内的运行状态图如图3所示。O为转子磁极位置角(0=0一们是 第一个状态) O与六个边界值的差值作为他hy的输入信号,通过逻辑转换得到逆变器的输入信号S。.6 图4脉冲序列产生模块 六个rehy的输出分别是下表的l、2、3、4、5、6,S-^6的逻辑值如表2 表2脉冲信号逻辑真值表 图2无刷直流电动机的基本电路结构 表1三相电流在晶闸管中的流向 电劁晓O 棚捌3 i钾 3纠3 1 A ^^A^A导习蕊守 BBBBBBC CCC C C Ⅵ导通 导通导丑%导粗 导通导遇Ⅵ导逼 导迥导逼Ⅵ导逼 导通导通、‘导遗导通 导通碥 导逼 导通 导遇 删c田d 明f 图3一周期内磁势和电流方向的变化 由5逆变器等效电路 O 3 PWM逆变器的通用数学模型 三相全桥逆变器有大功率晶体管(CTR)、功率场效应管(MOSFET)、绝缘栅双 极型晶体管(IGBT)等器件,这些器件一般由6个开关管组成。在仿真过程中,可以用六个理想的开关S;(i.1,2,3,4'5,6)来代替,其等效的拓扑结构如图5所示。 由于同一桥臂的两个开关管不能同时导通,可设第i个开关管导通时,Si_1;否则Si=O。同时假设三相参数完全对称,ok产k L,R.:R妒k=R,则由逆变器输出端至直流电源中性点的电压为 Iu0=s计%/2{【,k=s6}ud,2 K=sn讥/2 (10) 其中开关函数。 本拦目贲任编辑:唐一乐 -?-?-人工■奠夏识射陵术?-2707 万方数据
直流电机PWM调速系统参考论文
毕业论文 基于51单片机的直流电机PWM调速控制系统设计 所在学院 专业名称 年级 学生姓名、学号 指导教师姓名、职称 完成日期
摘要 本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。本文中采用了三极管组成了PWM信号的驱动系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。另外,本系统中使用了霍尔元件对直流电机的转速进行测量,经过处理后,将测量值送到液晶显示出来。 关键词:PWM信号,霍尔元件,液晶显示,直流电动机 I
目录 目录 ................................................................................................................................ III 1 引言 (1) 1.1 课题背景 (1) 1.1.2 开发背景 (1) 1.1.3 选题意义 (2) 1.2 研究方法及调速原理 (2) 1.2.1 直流调速系统实现方式 (4) 1.2.2 控制程序的设计 (5) 2 系统硬件电路的设计 (6) 2.1 系统总体设计框图及单片机系统的设计 (6) 2.2 STC89C51单片机简介 (6) 2.2.1 STC89C51单片机的组成 (6) 2.2.2 CPU及部分部件的作用和功能 (7) 2.2.3 STC89C51单片机引脚图 (8) 2.2.4 STC89C51引脚功能 (8) 3 PWM信号发生电路设计 (11) 3.1 PWM的基本原理 (11) 3.2 系统的硬件电路设计与分析 (11) 3.3 H桥的驱动电路设计方案 (12) 5 主电路设计 (14) 5.1 单片机最小系统 (14) 5.2 液晶电路 (14) 5.2.1 LCD 1602功能介绍 (15) 5.2.2 LCD 1602性能参数 (16) 5.2.3 LCD 1602与单片机连接 (18) 5.2.4 LCD 1602的显示与控制命令 (19) 5.3 按键电路 (20) 5.4 霍尔元件电路 (21) III
无刷直流电机仿真
无刷直流电机仿真 学号:2110903073 姓名:方浩 1 无刷直流电机仿真模型 本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。 图1 无刷直流电机控制原理框图 以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。 图2 无刷直流电机控制系统仿真模型框图 1.1 在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块
根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i,i,ab i必须首先求得三相反电动势信号e,e,e,整个电动机本体模块的结果如下图cabc 3所示。电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块 和位置检测模块。 图3 电机本体模块 1. 反电势求取模块 本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块 Lookup Table模块的实质是通过查表构造反电动势波形,只要把360?内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。其中Ke为电机的反电动势系数。具体的Lookup Table参数设置参照下表 1。 表 1 位置信号和单位反电动势的关系 0 60 120 180 240 300 360 位置 A 1 1 1 -1 -1 -1 1 B -1 -1 1 1 1 -1 -1 C 1 -1 -1 -1 1 1 1 2. 转矩计算模块 依据数学模型建立转矩计算模型如图5所示。
直流电机PWM调速电路汇编
《电子技术》课程设计报告课题:直流电机PWM调速电路 班级电气1107 学号 1101205712学生姓名王海彬 专业电气信息类 学院电子与电气工程学院 指导教师电子技术课程设计指导小组 淮阴工学院 电子与电气工程学院 2012年05月
直流电机PWM调速电路 一)设计任务与要求: 1.设计电机驱动主回路,实现直流电机的正反向转动; 2.设计PWM驱动信号发生电路; 3.设计电机转速显示电路; 4.设计电机转速调节电路,可以按键或电位器调节电机转速; 5.安装调试。 二)系统原理及功能概述 1)直流电机脉宽调速电路原理 对小功率直流电机调速系统,使用单片机是极为方便的。其方法是通过改变电机电枢电压接通时间与通电周期的比值(即占空比)来控制电机速度。这种方法称为脉冲宽度调制(Pulse Width Modulation),简称 PWM。 改变占空比的方法有 3 种: (1)定宽调频法,这种方法是保持 t1 不变,只改变 t2 ,这样周期 T(或频率)也随之改变; (2)调宽调频法,保持 t1 不变,而改变 t2 ,这样也使周期 T(或频率)改变; (3)定频调宽法,这种方法是使周期 T(或频率)不变,而同时改变 t2 和 t1 由,当控制频率与系统的固有频率接近于前两种方法都改变了周期(或频率)时,将会引起振荡,用的比较少,因此本系统用的是定频调宽法。在脉冲作用下,当电机通电时,速度增加。电机断电时,速度逐渐减小。只要按一定规律,改变通断电时间,即可实现对电机的转速控制。设电机永远接通电源时,其最大转速为 Vmax,设占空比 D= t1 /T ,则电机的平均速度为 Vd,平均速度 Vd 与占空比 D 的函数曲线如图 1-2 所示,从图可以看出,VD 与占空比 D 并不是完全线性关系(图中实线),当系统允许时,可以将其近似的看成线性关系(图中虚线),本系统采用近似法。
无刷直流电动机PWM 控制方案
第三章、用EL-DSPMCKIV实现无刷直流电动机PWM 控制方案 实验概述: 本实验是一个无刷直流电动机的PWM控制系统。结构简单,用到的模块也较少。下面给出每个模块的输入与输出量名称及其量值格式 (一)、无刷直流电动机PWM 控制原理简介 无刷直流电动机从结构上讲更接近永磁同步电动机(我们在下一章节中做详细介绍),控制方法也很简单,主要是通过检测转子的位置传感器给出的转子磁极位置信号来确定励磁的方向,从而保证转矩角在90 度附近变化,保证电机工作的高效率。定子换相是通过转子位置信号来控制,转矩的大小则通过PWM的方法控制有效占空比来调控。 我公司提供过两种直流无刷电机,一种以前提供过的57BL-02直流无刷电机的额定电压为24V,额定转速为1600rpm,转子极数为4,也就是2 极对,还有一种是现在提供的57BL-0730N1直流无刷电机,该电机额定转速为3000rpm,转子极数为10,也就是5极对,这两种电机的转子位置都由霍尔传感器提供,同时由此计算出电机的转速,控制程序样例没有电流环。 (二)、系统组成方案及功能模块划分 本实验为开环和闭环实验,通过几个模块信号处理最终用BLDCPWM模块产生IPM 驱动信号来控制直流无刷电机转动。
下图为一个开环控制的系统功能框图,参考占空比信号经由RMP2CNTL 模块处理,变成缓变信号送到PWM产生模块。霍尔传感器的输出脉冲信号,经由DSP的CAP1、CAP2、CAP3端口被DSP获取。通过霍尔提供的转子位置信息HALL3_DRV模块判断转子位置,并将该转子位置信息通过计数器传递给BLDC_3PWM_DRV 模块,该模块通过占空比输入、设定开关频率以及转子的位置信息产生相应的PWM 信号作用于逆变器中的开关管,从而驱动电动机旋转。
直流电动机的PWM调压调速原理
直流电动机的PWM调压调速原理 直流电动机转速N的表达式为:N=U-IR/Kφ 由上式可得,直流电动机的转速控制方法可分为两类:调节励磁磁通的励磁控制方法和调节电枢电压的电枢控制方法。其中励磁控制方法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。现在,大多数应用场合都使用电枢控制方法。 对电动机的驱动离不开半导体功率器件。在对直流电动机电枢电压的控制和驱动中,对半导体器件的使用上又可分为两种方式:线性放大驱动方式和开关驱动方式。 线性放大驱动方式是使半导体功率器件工作在线性区。这种方式的优点是:控制原理简单,输出波动小,线性好,对邻近电路干扰小;但是功率器件在线性区工作时由于产生热量会消耗大部分电功率,效率和散热问题严重,因此这种方式只用于微小功率直流电动机的驱动。绝大多数直流电动机采用开关驱动方式。开关驱动方式是使半导体器件工作在开关状态,通过脉宽调制PWM 来控制电动机电枢电压,实现调速。 在PWM调速时,占空比α是一个重要参数。以下3种方法都可以改变占空比的值。 (1)定宽调频法 这种方法是保持t1不变,只改变t2,这样使周期T(或频率)也随之改变。 (2)调频调宽法 这种方法是保持t2不变,只改变t1,这样使周期T(或频率)也随之改变。 (3)定频调宽法 这种方法是使周期T(或频率)保持不变,而同时改变t1和t2。 前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固有频率接近时,将会引起振荡,因此这两种方法用得很少。目前,在直流电动机的控制中,主要使用定频调宽法。 直流电动机双极性驱动可逆PWM控制系统 双极性驱动则是指在一个PWM周期里,作为在电枢两端的脉冲电压是正负交替的。 双极性驱动电路有两种,一种称为T型,它由两个开关管组成,采用正负电源,相当于两个不可逆控制系统的组合。但由于T型双极性驱动中的开关管要承受较高的反向电压,因此只用在低压小功率直流电动机驱动。 另一种称为H型。 H型双极性驱动 一、显示接口模块 方案一:液晶显示器也是一种常用的显示器件。它的优点是功耗低,寿命长,本身无老化问题,显示信息量大(可以显示字母和数字),在显示字符上没有限制。但价格高,接口电路较为复杂。其只在一些(袖珍型)设备上作为显示之用。
对直流无刷电机的pid控制
PID闭环速度调节器采用比例积分微分控制 闭环速度调节器采用比例积分微分控制(简称PID控制),其输出是输入的比例、积分和微分的函数。PID调节器控制结构简单,参数容易整定,不必求出被控对象的数学模型,因此PID 调节器得到了广泛的应用。 PID调节器虽然易于使用,但在设计、调试无刷直流电机控制器的过程中应注意:PID调节器易受干扰、采样精度的影响,且受数字量上下限的影响易产生上下限积分饱和而失去调节作用。所以,在不影响控制精度的前提下对PID控制算法加以改进,关系到整个无刷直流电机控制器设计的成败。 2速度设定值和电机转速的获取 为在单片机中实现PID调节,需要得到电机速度设定值(通过A/D变换器)和电机的实际转速,这需要通过精心的设计才能完成。 无刷直流电机的实际转速可通过测量转子位置传感器(通常是霍尔传感器)信号得到,在电机转动过程中,通过霍尔传感器可以得到如图2所示的周期信号。 由图2可知,电机每转一圈,每一相霍尔传感器产生2个周期的方波,且其周期与电机转速成反比,因此可以利用霍尔传感器信号得到电机的实际转速。为尽可能缩短一次速度采样的时间,可测得任意一相霍尔传感器的一个正脉冲的宽度,则电机的实际转速为:但由于利用霍尔传感器信号测速,所以测量电机转速时的采样周期是变化的,低速时采样周期要长些,这影响了PID 调节器的输出,导致电机低速时的动态特性变差。解决的办法是将三相霍尔传感器信号相“与”,产生3倍于一相霍尔传感器信号频率的倍频信号,这样可缩短一次速度采样的时间,但得增加额外的硬件开销。直接利用霍尔传感器信号测速虽然方便易行,但这种测速方法对霍尔传感器在电机定子圆周上的定位有较严格的要求,当霍尔传感器在电机定子圆周上定位有误差时,相邻2个正脉冲的宽度不一致,会导致较大的测速误差,影响PID调节器的调节性能。若对测速精度要求较高时,可采用增量式光电码盘,但同样会增加了电路的复杂性和硬件的开销。 电机速度设定值可以通过一定范围内的电压来表示。系统中采用了串行A/D(如ADS7818)来实现速度设定值的采样。但在电机调速的过程中,电机控制器的功率输出部分会对A/D模拟输入电压产生干扰,进行抗干扰处理。 3非线性变速积分的PID算法 (1)PID算法的数字实现 离散形式的PID表达式为: 其中:KP,KI,KD分别为调节器的比例、积分和微分系数;E(k),E(k-1)分别为第k 次和k-1次时的期望偏差值;P(k)为第k次时调节器的输出。 比例环节的作用是对信号的偏差瞬间做出反应,KP越大,控制作用越强,但过大的KP会导致系统振荡,破坏系统的稳定性。积分环节的作用虽然可以消除静态误差,但也会降低系统的响应速度,增加系统的超调量,甚至使系统出现等幅振荡,减小KI可以降低系统的超调量,但会减慢系统的响应过程。微分环节的作用是阻止偏差的变化,有助于减小超调量,克服振荡,使系统趋于稳定,但其对干扰敏感,不利于系统的鲁棒性。 (2)经典PID算法的积分饱和现象 当电机转速的设定值突然改变,或电机的转速发生突变时,会引起偏差的阶跃,使|E(k)|增大,PID的输出P(k)将急剧增加或减小,以至于超过控制量的上下限Pmax,此时的实际控制量只能限制在Pmax,电机的转速M(k)虽然不断上升,但由于控制量受到限制,其增长的速度减慢,偏差E(k)将比正常情况下持续更长的时间保持在较大的偏差值,从而使得PID 算式中的积分项不断地得到累积。当电机转速超过设定值后,开始出现负的偏差,但由于积分项已有相当大的累积值,还要经过相当一段时间后控制量才能脱离饱和区,这就是正向积分饱和,反向积分饱和与此类似。解决的办法:一是缩短PID的采样周期(这一点单片机往往达不到),