Ansys15.0workbench网格划分教程(修订)
第3章Workbench网格划分
3.1 网格划分平台
ANSYS Workbench中提供ANSYS Meshing应用程序(网格划分平台)的目标是提供通用的网格划分格局。网格划分工具可以在任何分析类型中使用。
●FEA仿真:包括结构动力学分析、显示动力学分析(AUTODYN、ANSYS LS/DYNA)、
电磁场分析等。
●CFD分析:包括ANSYS CFX、ANSYS FLUENT等。
3.1.1 网格划分特点
在ANSYS Workbench中进行网格划分,具有以下特点:
●ANSYS网格划分的应用程序采用的是Divide & Conquer(分解克服)方法。
●几何体的各部件可以使用不同的网格划分方法,亦即不同部件的体网格可以不匹配
或不一致。
●所有网格数据需要写入共同的中心数据库。
●3D和2D几何拥有各种不同的网格划分方法。
ANSYS Workbench 15.0从入门到精通
3.1.2 网格划分方法
ANSYS Workbench中提供的网格划分法可以在几何体的不同部位运用不同的方法。
1.对于三维几何体
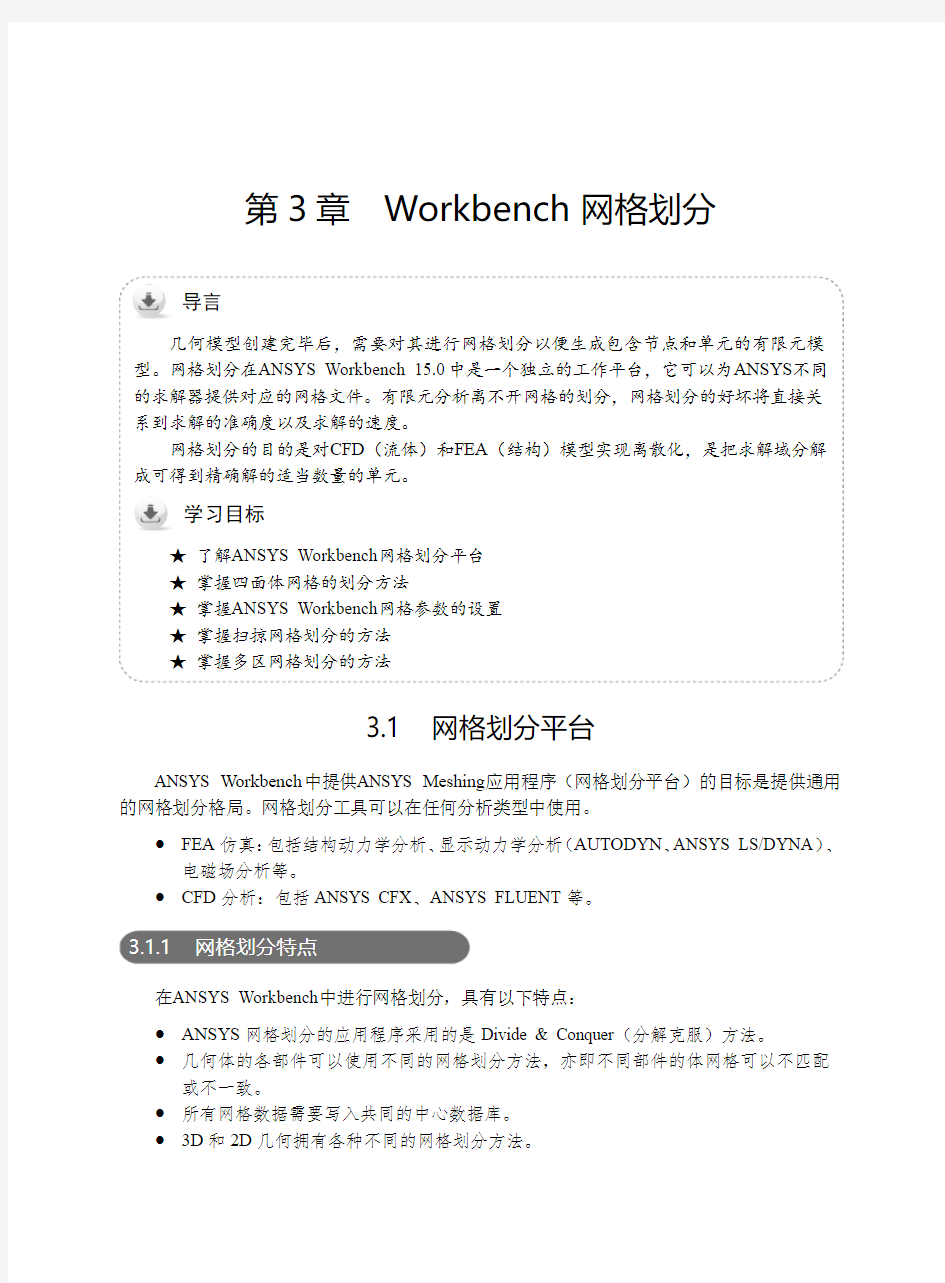
对于三维几何体(3D)有如图3-1所示的几种不同的网格划分方法。
图3-1 3D几何体的网格划分法
(1)自动划分法(Automatic)
自动设置四面体或扫掠网格划分,如果体是可扫掠的,则体将被扫掠划分网格,否则将使用Tetrahedrons下的Patch Conforming网格划分器划分网格。同一部件的体具有一致的网格单元。
(2)四面体划分法(Tetrahedrons)
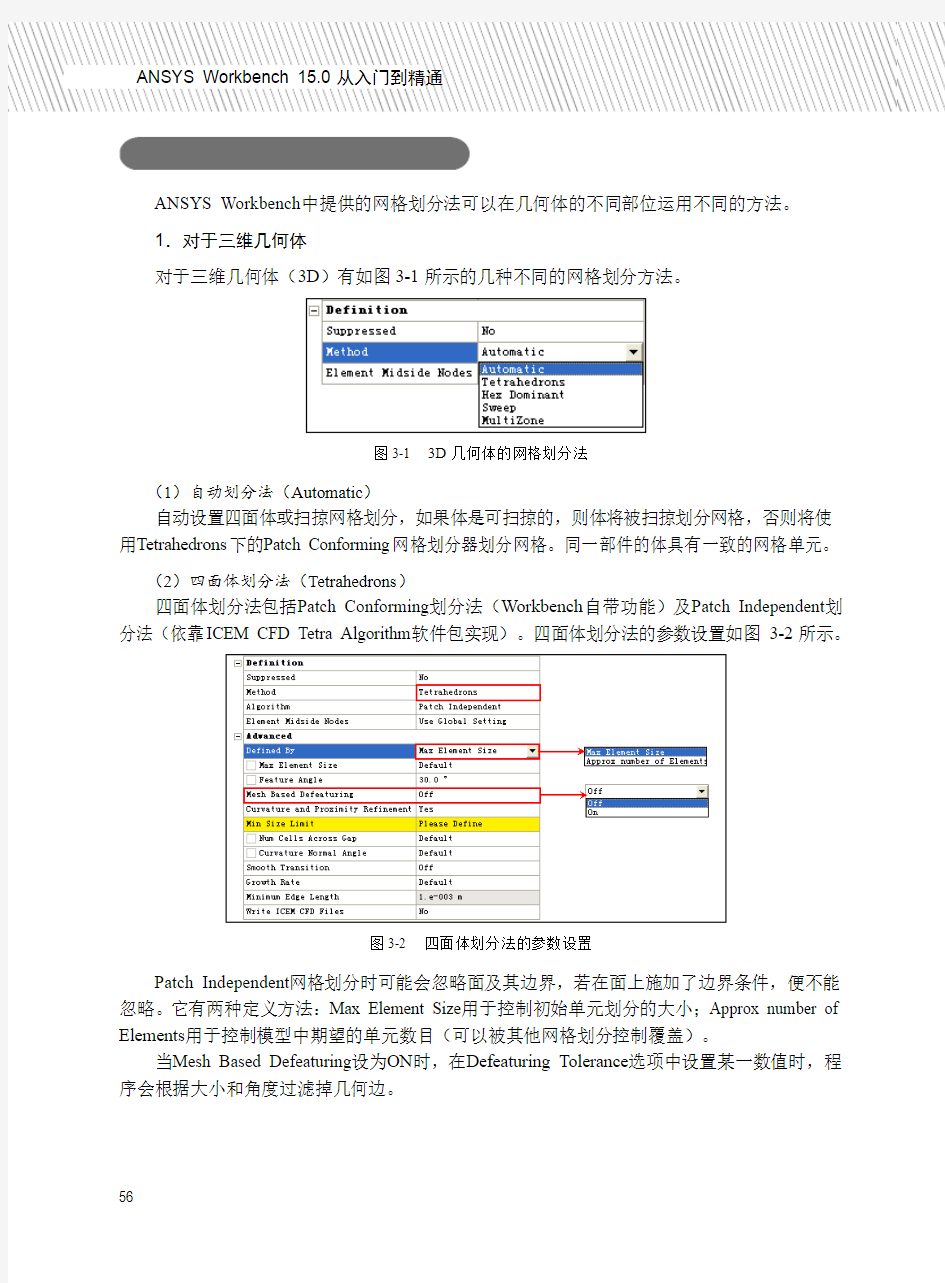
四面体划分法包括Patch Conforming划分法(Workbench自带功能)及Patch Independent划分法(依靠ICEM CFD Tetra Algorithm软件包实现)。四面体划分法的参数设置如图3-2所示。
图3-2 四面体划分法的参数设置
Patch Independent网格划分时可能会忽略面及其边界,若在面上施加了边界条件,便不能忽略。它有两种定义方法:Max Element Size用于控制初始单元划分的大小;Approx number of Elements用于控制模型中期望的单元数目(可以被其他网格划分控制覆盖)。
当Mesh Based Defeaturing设为ON时,在Defeaturing Tolerance选项中设置某一数值时,程序会根据大小和角度过滤掉几何边。
56
第19章多物理场耦合分析
(3)六面体主导法(Hex Dominant)
首先生成四边形主导的面网格,然后得到六面体,最后根据需要填充棱锥和四面体单元。该方法适用于不可扫掠的体或内部容积大的体,而对体积和表面积比较小的薄复杂体、CFD 无边界层的识别无用。
(4)扫掠划分法(Sweep)
通过扫掠的方法进行网格划分,网格多是六面体单元,也可能是楔形体单元。
(5)多区划分法(MultiZone)
多区及扫掠划分网格是一种自动几何分解方法。使用扫掠方法时,元件要被切成3个体来得到纯六面体网格。
2.对于面体或壳二维几何
对于面体或壳二维(2D)几何,ANSYS Workbench提供的网格划分方法有:
●四边形单元主导(Quad Dominant)。
●三角形单元(Triangles)。
●均匀四边形/三角形单元(Uniform Quad/Tri)。
●均匀四边形单元(Uniform Quad)。
3.1.3 网格划分技巧
不同的软件平台,网格的划分技巧也是不同的,针对ANSYS Workbench网格划分平台,网格的划分技巧如下。
1.对于结构网格
●可以通过细化网格来捕捉所关心部位的梯度(包括温度、应变能、应力能、位移等)。
●结构网格大部分可划分为四面体网格,但首选网格是六面体单元。
●有些显式有限元求解器需要六面体网格。
●结构网格的四面体单元通常是二阶的(单元边上包含中节点)。
2.对于CFD网格
●可以通过细化网格来捕捉关心的梯度(包括速度、压力、温度等)。
●网格的质量和平滑度对结果的精确度至关重要(提高网格质量和平滑度会导致较大
的网格数量,通常以数百万单元计算)。
●大部分可划分为四面体网格,但首选网格是六面体单元。
●CFD网格的四面体单元通常是一阶的(单元边上不包含中节点)。
3.网格划分的注意事项
●网格划分时需要注意细节,几何细节是和物理分析息息相关的,不必要的细节会大
大增加分析需求。
57
58
ANSYS Workbench 15.0从入门到精通 ●
需要注意网格细化,复杂应力区域等需要较高密度的网格。 ●
需要注意效率,大量的单元需要更多的计算资源(内存、运行时间),网格划分是需要在分析精度和资源使用方面进行权衡。 ● 需要注意网格质量,在网格划分时,复杂几何区域的网格单元会变扭曲,由此导致网格质量降低,劣质的单元会导致较差的结果,甚至在某些情况下得不到结果。在ANSYS Workbench 中有很多方法可用来检查单元网格的质量。
3.1.4 网格划分流程
在
ANSYS Workbench 中,网格的划分流程如下:
设置划分网格目标的物理环境。
设定网格的划分方法。
网格参数的设置(尺寸、控制、膨胀等)
。
为方便使用创建命名选项。
预览网格并进行必要的调整。
生成网格。
检查生成的网格质量。
准备分析网格。
3.1.5 网格尺寸策略
对于划分不同分析类型的分析系统,网格尺寸的控制策略也不同,下面简单介绍力学分析及CFD 分析的网格尺寸策略。
1.力学分析网格尺寸策略
●
利用最小输入的有效方法来解决关键的特征。 ●
定义或接受少数全局网格尺寸并设置默认值。 ●
利用Relevance 和 Relevance Center 进行全局网格调整。 ● 根据需要可对体、面、边、影响球定义尺寸,可以对网格生成的尺寸施加更多的控制。
2.CFD 网格尺寸策略
●
在必要的区域依靠Advanced Size Functions (高级尺寸功能)细化网格,其中默认为Curvature ,根据需要可以选择Proximity 。 ● 识别模型的最小特征:设置能有效识别特征的最小尺寸;如果导致了过于细化的网格需要在最小尺寸下作用一个硬尺寸;可以使用收缩控制来去除小边和面,以确保收缩容差小于局部最小尺寸。
●
根据需要可以对体、面、边或影响球定义软尺寸,可以对网格生成的尺寸设置更多的控制。
59
第19章 多物理场耦合分析
3.2 3D 几何网格划分
所有的3D 网格划分方法都要求组成的几何为实体,若输入的是由面体组成的几何,则需要额外操作,将其转换为3D 实体方可进行3D 网格划分,当然表面体仍可以由表面网格划分法来划分。常见的3D 网格基本形状如图
3-3所示。
四面体 六面体 棱锥 棱柱
图3-3 3D 网格的基本形状
其中四面体为非结构化网格,六面体通常为结构化网格,棱锥为四面体和六面体之间的过渡网格,棱柱由四面体网格被拉伸时生成。四面体网格划分在三维网格划分中是最简单的,因此本节将着重介绍四面体网格。
3.2.1 四面体网格的优缺点
四面体网格具有鲜明的优缺点。
● 优点:四面体网格可以施加于任何几何体,可以快速、自动生成;在关键区域容易
使用曲度和近似尺寸功能自动细化网格;可以使用膨胀细化实体边界附近的网格(即
边界层识别),边界层有助于面法向网格的细化,但在2D (表面网格)中仍是等向
的;为捕捉一个方向的梯度,网格在所有的三个方向细化,即等向细化。
●
缺点:在近似网格密度情况下,单元和节点数高于六面体网格;网格一般不可能在
一个方向排列;由于几何和单元性能的非均质性,故而不适合于薄实体或环形体;
在使用等向细化时网格数量急剧上升。 3.2.2 四面体网格划分时的常用参数
四面体网格划分时常用的参数如下。
●
最大、最小尺寸。 ●
面、体尺寸。 ●
高级尺寸(Curvature and/or Proximity )。 ●
增长比(对CFD 逐步变化,避免突变)。 ●
平滑(有助于获取更加均匀尺寸的网格)。 ●
统计学。 ● Mesh Metrics 。
60
ANSYS Workbench 15.0从入门到精通 3.2.3 四面体算法
在ANSYS Workbench 网格划分平台下,有两种算法可以生成四面体网格,而且这两种算法均可用于CFD 的边界层识别。
1.Patch Conforming
首先利用几何所有面和边的Delaunay 或Advancing Front 表面网格划分器生成表面网格,然后基于TGRID Tetra
算法由表面网格生成体网格。
Patch Conforming 算法包含膨胀因子的设定,用于控制四面体边界尺寸的内部增长率, CFD 的膨胀层或边界层识别,可与体扫掠法混合使用产生一致的网格。
利用Patch Conforming
生成四面体网格的操作步骤如下:
右击Mesh ,如图3-4所示,在弹出的快捷菜单中选择Insert (插入)→Method (方法)
命令,或者如图3-5所示选择Mesh Control (网格控制)→Method (方法)命令。
图3-4 快捷菜单
图3-5 工具栏命令 在网格参数设置栏中选择Scope →Geometry 选项,在图形区域选择应用该方法的体,
单击(应用)按钮,如图3-6所示。 将Definition 栏的Method 设置为Tetrahedrons ,如图3-7所示,将Algorithm 设置为
Patch Conforming ,如图3-8
所示,即可使用Patch Conforming 算法划分四面体网格。
图3-6 Geometry 设置
图3-7 Method 设置 图3-8 Algorithm 设置
按照上面的步骤可以对不同的部分使用不同的方法。
61
第19章 多物理场耦合分析
2.Patch Independent
该算法用于生成体网格并映射到表面产生表面网格,如果没有载荷、边界条件或其他作用,则面和它们的边界(边和顶点)无需考虑。该算法是基于ICEM CFD Tetra 的,Tetra 部分具有膨胀应用。
Patch Independent 四面体的操作步骤与Patch Conforming 相同,只是在设置Algorithm 时选择Patch Independent 即可。
3.2.4 四面体膨胀
四面体膨胀的基本设置包括膨胀选项、前处理和后处理膨胀算法等,具体在后面的章节中介绍,这里不再赘述。
3.3 网格参数设置
在利用ANSYS Workbench 进行网格划分时,可以使用默认的设置,但要进行高质量的网格划分,还需要用户参与到网格的详细参数设置中去,尤其是对于复杂的零部件。
网格参数是在参数设置区进行的,同时该区还显示了网格划分后的详细信息。参数设置区包含了Defaults (缺省设置)、Sizing (尺寸控制)、Inflation (膨胀控制)、Advanced (高级控制)、
Defeaturing (损伤设置)、Statistics (网格信息)等信息,如图3-9所示。
划分网格目标的物理环境包括结构分析(Mechanical )、电磁分析(Electromagnetics )、流体分析(CFD )、显示动力学分析(
Explicit )等,如图3-10所示。设置完成后会自动生成相关物理环境的网格(如Mechanical 、FLUENT 、CFX 等)。
图3-9 网格参数设置 图3-10 目标物理环境 在划分网格时,不同的分析类型需要有不同的网格划分要求,结构分析使用高阶单元划分较为粗糙的网格,CFD 要求使用好的、平滑过渡的网格、边界层转化,不同的CFD 求解器也有不同的要求,如表3-1所示。在网格划分的物理环境设置完成之后,需要设定物理优先项,
62 ANSYS Workbench 15.0从入门到精通 划分后的网格如图3-11、图3-12、图3-13、图3-14所示。
表3-1 不同的物理环境在缺省设置下的网格特点
图3-11 Mechanical 默认网格 图3-12 CFD 默认网格
图3-13 Electromagnetics 默认网格 图3-14 Explicit 默认网格
63
第19章 多物理场耦合分析
3.3.1 缺省参数设置
关于缺省参数的设置(Defaults )在前面的小节中已经介绍过了,这里仅介绍Relevance (相关性)及Relevance Center (关联中心)两个选项,如图3-15所示。虽然Relevance Center 是在
尺寸参数控制选项里设置的,但由于Relevance 需要与其配合使用,故在此一起介绍。
图3-15 缺省参数设置
其中Relevance (相关性)是通过拖动滑块来实现网格细化或粗糙控制的,而Relevance Center (关联中心)有Coarse 、Medium 、Fine 三个选项进行选择控制,效果如图
3-16所示。
(a )Relevance 的值为-100 (b )Relevance 的值为0 (c
)Relevance 的值为100
(d )Relevance Center 为Coarse (e )Relevance Center 为Medium (f )Relevance Center 为Fine
图3-16 Relevance 及Relevance Center 参数设置效果
ANSYS Workbench 15.0从入门到精通
3.3.2 尺寸控制
尺寸控制(Sizing)是在参数设置区进行设定的,尺寸控制包含的选项如图3-17所示。
图3-17 尺寸控制参数设置
●全局尺寸控制:Element Size(单元尺寸)用来设置整个模型使用的单元尺寸。该尺
寸将应用到所有的边、面和体的划分中。当在Sizing面板的Use Advanced Size Function下选用高级尺寸功能时,该选项将不会出现。
●初始尺寸种子:Initial Size Seed(初始尺寸种子)用来控制每一部件的初始网格种子,
此时已定义单元的尺寸会被忽略,它包含Active Assembly、Full Assembly、Part三个选项。
Active Assembly(有效组件):该选项为默认选项,初始种子放入未抑制部件,网格可以改变。
Full Assembly(整个组件):选择该设置时,不考虑抑制部件的数量,初始种子放入所有装配部件。由于抑制部件的存在,网格不会改变。
Part(部件):选择该设置时,初始种子在网格划分时放入个别特殊部件。由于抑制部件的存在,网格不会改变。
●平滑网格:平滑(Smoothing)是通过移动周围节点和单元的节点位置来改进网格质
量,包含Low、Medium、High三个选项可供选择。
●过渡:过渡(Transition)用于控制邻近单元增长比,包含Fast、Slow两个选项可供
选择。通常情况下CFD、Explicit分析需要缓慢产生网格过渡,Mechanical、Electromagetics需要快速产生网格过渡。
●跨度中心角:跨度中心角(Span Angle Center)用来设定基于边细化的曲度目标。控
制网格在弯曲区域细分,直到单独单元跨越这个角,包含Coarse(粗糙:60°~91°)、Medium(中等:24°~75°)、Fine(细化12°~36°)三个选项可供选择。不同的
64
第19章多物理场耦合分析
3-18所示。
跨度中心角的效果如图
(a)Coarse (b)Fine
图3-18 不同跨度中心角对比
1. 高级尺寸控制
在无高级尺寸功能时,可根据已定义的单元尺寸对边划分网格;而在有高级尺寸控制时,Curvature 和Proximity可以对网格进行细化,对缺陷和收缩控制进行调整,然后通过面和体网格划分器进行网格划分。
高级尺寸控制是通过在Sizing面板的Use Advanced Size Function进行开启控制的,高级尺寸功能包括Proximity and Curvature(近似和曲度)、Curvature(曲度)、Proximity(近似)以及Fixed(固定)4个选项,如图3-19所示,选择不同的选项时参数设置也会不同,如图3-20所示为选择Proximity and Curvature时的参数设置列表,如图3-21所示为选择Fixed时的参数设置列表。
图3-19 高级尺寸功能
65
ANSYS Workbench 15.0从入门到精通
图3-20 Proximity and Curvature参数设置列表图3-21 Fixed参数设置列表
2. 局部尺寸控制
根据所使用的网格划分方法,可用到的局部网格控制的尺寸包括Method(方法)、Sizing (尺寸)、Contact Sizing(接触尺寸)、Refinement(细化)、Mapped Face Meshing(映射面划分)、Match Control(匹配控制)、Pinch(收缩)及Inflation(膨胀)等。
插入局部尺寸的方法有两种:其一通过Mesh工具栏插入局部尺寸控制,如图3-22所示;其二通过快捷菜单插入,如图3-23所示。
插入局部尺寸后,在参数设置栏的Defination(定义)中默认会出现Element Size(单元尺寸)选项,如图3-24所示,该选项可以定义体、面、边或顶点的平均单元边长。当Type(类型)选择Sphere of Influence(球体内)时可以设定平均单元尺寸,如图3-25所示。
图3-22 Mesh工具栏图3-23 Mesh快捷菜单
各选项的不同取决于所作用的实体,若同时使用了高级尺寸功能,各选项也会不同,在
66
第19章多物理场耦合分析
图3-24 默认参数设置图3-25 选择Sphere of Influence
3.3.3 膨胀控制
膨胀控制(Inflation)是通过边界法向挤压面边界网格转化实现的,主要应用于CFD(计算流体力学)分析中,用于处理边界层处的网格,实现从膨胀层到内部网格的平滑过渡,其中包括纯六面体及楔形体等,但这并不表示膨胀控制只能应用于CFD,在固体力学的FEM分析中,亦可应用Inflation法来处理网格。
1.膨胀选项
Inflation Option(膨胀选项)包括Total Thickness(总厚度)、Smooth Transition(平滑过渡)、First Layer Thickness(第一层厚度)等选项,如图3-26所示。
(1)平滑过渡
该选项为默认选项,如图3-27所示,表示使用局部四面体单元尺寸计算每个局部的初始高度和总高度,以达到平滑的体积变化比。每个膨胀的三角形都有一个关于面积计算的初始高
度,在节点处平均。这意味着对于均匀网格,初始高度大致相同,而对于变化网格,初始高度是不同的。
图3-26 膨胀选项图3-27 Smooth Transition默认选项
选择Smooth Transition时,Transition Ratio(过渡比)选项会出现,用于设置膨胀的最后单元层和四面体区域第一单元层间的体尺寸改变。
67
68
ANSYS Workbench 15.0从入门到精通
(2)总厚度 Total Thickness (总厚度)用来创建常膨胀层,其参数如图3-28所示。可用Number of Layers 的值和Growth Rate 来控制,以获得Maximum Thickness 值控制的总厚度。不同于Smooth Transition 选项的膨胀,Total Thickness 选项的膨胀的第一膨胀层和下列每一层的厚度都是常量。
(3)第一层厚度
First Layer Thickness (第一层厚度)用来创建常膨胀层,其参数如图3-29所示。可使用First Layer Height 、Maximum Layers 和Growth Rate 控制生成膨胀网格。不同于Smooth Transition 选项的膨胀,
First Layer Thickness 选项的第一膨胀层和下列每一层的厚度都是常量。
图3-28 Total Thickness 选项 图3-29 First Layer Thickness 选项 2.膨胀运算法则
膨胀运算法则(Inflation Algorithm )包括Pre (前处理)、Post (后处理)两个选项,如图3-30所示,各选项的使用方法如下。
● Pre (前处理):是TGrid 算法,该算法是所有物理类型的默认设置,运算时首先进行表面网格膨胀,然后生成体网格。前处理可以应用于扫掠和2D 网格划分,但不支持邻近面设置不同的层数。
图3-30 膨胀运算法则
● Post (后处理):是ICEM CFD 算法,该算法是使用一种在四面体网格生成后作用的处理技术,只对Patching Conforming 和Patch Independent 四面体网格有效。
3.3.4 网格信息
网格信息(Statistics )用来统计网格划分的结果,主要包括Nodes (节点)、Elements (单元)及Mesh Metric (网格质量)几个方面的内容,如图3-31所示,这里不再详细讲解。
69
第19章 多物理场耦合分析
图3-31 网格信息
3.4 扫掠网格划分
扫掠(Sweep )是指当创建六面体网格时先划分源面再延伸到目标面的一种网格划分方法,除源面及目标面以外的面都叫做侧面。扫掠方向或路径由侧面定义,
源面和目标面间的单元层是由插值法建立并投射到侧面上去的。
3.4.1 扫掠划分方法
使用扫掠划分方法能够实现可扫掠体六面体和楔形单元的有效划分。扫掠划分方法具有以下特点:
●
体相对源面和目标面的拓扑可实现手动或自动选择。 ●
源面可划分为四边形和三角形面。 ●
源面网格需要复制到目标面。 ● 随着体的外部拓扑,生成六面体或楔形单元连接两个面。
一个可扫掠体需要满足下列条件:
●
包含不完全闭合空间。 ●
至少有一个由边或闭合表面连接的从源面到目标面的路径。 ●
没有硬性分割定义,在源面和目标面的相应边上可以有不同的分割数。
扫掠(Sweep )网格划分的操作步骤如下:
右击Mesh ,如图3-32所示,在弹出的快捷菜单中选择Insert (插入)→Method (方法)
命令,或者如图3-33所示,选择Mesh Control (网格控制)→Method (方法)命令。
70
ANSYS Workbench 15.0从入门到精通
图3-32 Mesh 快捷菜单
图3-33
Mesh 工具栏 在网格参数设置栏中选择Scope →Geometry 选项,在图形区域选择应用该方法的体,
单击(应用)按钮,如图3-34所示。
将Definition 栏中的Method 设置为扫掠(Sweep ),即可使用扫掠方法进行网格划分,
如图3-35所示。
图3-34 网格参数设置 图3-35 使用扫掠方法 在ANSYS Workbench 网格划分中有3种六面体划分或扫掠方法。
● 普通扫掠方法:指单个源面对单个目标面的扫掠,该方法可以很好地处理扫掠方向
拥有多个侧面的情况,扫掠时需要分解几何以使每个扫掠路径对应一个体。
●
薄扫掠方法:指多个源面对多个目标面的扫掠,该方法可以很好地替代壳模型中的面,以得到纯六面体网格。
● 多区扫掠方法:是一种自由分解方法,支持多个源面对多个目标面的扫掠。
3.4.2 扫掠网格控制
使用扫掠(Sweep )方法进行网格划分时,网格的控制参数如图3-36所示。
71
第19章 多物理场耦合分析
图3-36 Sweep 网格的控制参数
●
Free Face Mesh Type (自由面网格类型):包括Quad/Tri (四边形/三角形)、All Quad (所有四边形)、All Tri (所有三角形)。 ●
Type (类型):包括Element Size (单元尺寸—软约束)、Number of Divisions (分割数—硬约束)。 ● Sweep Bias Type (扫掠偏斜类型):类似于边偏斜(从源面到目标面)。
3.5 多区网格划分
扫掠网格划分方法可以实现单个源面对单个目标面的扫掠,可以很好地处理扫掠方向的多个侧面,而本节将要介绍的多区网格划分则为一种自由分解方法,可以实现多个源面对多个目标面的网格划分。
3.5.1 多区划分方法
当划分相较于传统扫掠方法来说太复杂的单体部件时、当需要考虑多个源面和目标面时、当关闭对源面和侧面的膨胀时、当“薄”实体部件的源面和目标面不能正确匹配,但关心目标侧面的特征时就需要使用多区网格划分法。
多区(MultiZone )网格划分的操作步骤如下:
右击Mesh ,如图3-37所示,在弹出的快捷菜单中选择Insert (插入)→Method (方
法)命令,或者如图3-38所示,选择Mesh Control (网格控制)→Method (方法)
命令。
72
ANSYS Workbench 15.0从入门到精通
图3-37 Mesh 快捷菜单
图3-38 Mesh 工具栏 在网格参数设置栏中选择
Scope →Geometry 命令,在图形区域选择应用该方法的体,
单击(应用)按钮,如图3-39所示。
将Definition 栏的Method 设置为多区(MultiZone ),即可使用多区方法进行网格划
分,如图
3-40所示。
图3-39 网格参数设置 图3-40 使用多区方法
3.5.2 多区网格控制
利用多区(MultiZone )方法进行网格划分时,网格的控制参数如图3-41所示。
图3-41 MultiZone 网格的控制参数
●
Mapped Mesh Type (映射网格类型):包括Hexa (六面体)、Hexa/Prism (六面体/棱柱)。 ● Free Mesh Type (自由网格类型):包括Not Allowed (不允许)、Tetra (四面体)、
73
第19章 多物理场耦合分析
Hexa Dominant (六面体-支配)、Hexa Core (六面体-核心)。 Src/Trg Selection (源面/目标面选择):包括Automatic (自动的)、Manual Source
(手动源面)。
3.6 网格划分案例
通过上面几节的学习,已经基本掌握了网格划分的方法,本节将通过实例的方法来加强对网格划分的方法及思路的掌握,并从中了解各网格参数的设置技巧。
3.6.1 自动网格划分案例
1
.启动Workbench 并建立网格划分项目
在Windows 系统下执行“开始”→“所有程序”→ANSYS 15.0→Workbench 15.0命
令,启动
ANSYS Workbench 15.0,进入主界面。
在ANSYS Workbench 主界面中选择Units (单位)→Metric (kg,mm,s,℃,mA,N,mV )
命令,设置模型单位,如图3-42所示。
图
3-42 设置单位
双击主界面Toolbox (工具箱)中的Component Systems →Mesh (网格)选项,即可
在项目管理区创建分析项目A 。
2.导入创建几何体
在A2栏的Geometry 上单击鼠标右键,在弹出的快捷菜单中选择Import Geometry
→Browse 命令,如图3-43所示,此时会弹出“打开”对话框。
74 ANSYS Workbench 15.0从入门到精通
图3-43
导入几何体
在弹出的“打开”对话框中选择文件路径,导入char03-01几何体文件,如图3-44所示,
此时A2栏Geometry 后的变为,如图
3-45所示,表示实体模型已经存在。
图3-44 “打开”对话框 图3-45
模型已存在的项目 双击项目A 中的A2栏Geometry ,此时会进入到DM 界面,设计树中Import1前显
示,表示需要生成,图形窗口中没有图形显示,如图
3-46所示。 单击(生成)按钮,即可显示生成的几何体,如图3-47所示,此时可在
几何体上进行其他的操作,本例无需进行操作。
单击
DM 界面右上角的
(关闭)按钮,退出DM ,返回到
Workbench 主界面。
图3-46 生成前的DM 界面 图3-47 生成后的DM 界面
Gambit使用教程及入门实例
第一章Gambit使用 1.1Gambit介绍 网格的划分使用Gambit软件,首先要启动Gambit,在Dos下输入Gambit
图2 视图控制面板 视图控制面板中的命令可分为两个部分,上面的一排四个图标表示的是四个视图,当激活视图图标时,视图控制面板中下方十个命令才会作用于该视图。 视图控制面板中常用的命令有: 全图显示、选择显示视图、选择视图坐标、选择显 示项目、渲染方式。 同时,我们还可以使用鼠标来控制视图中的模型显示。其中按住左键拖曳鼠标可以旋转视图,按住中键拖动鼠标则可以在视图中移动物体,按住右键上下拖动鼠标可以缩放视图中的物体。 命令面板 命令面板是Gambit的核心部分,通过命令面板上的命令图标,我们可以完成绝大部分网格划分的工作。 图3显示的就是Gambit的命令面板。weism
ANSYS网格划分总结大全
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材
ANSYS 13.0 Workbench 网格划分及操作案例
第 3章 ANSYS 13.0 Workbench网格划分及操作案例 网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。网格直接影响到求解精 度、求解收敛性和求解速度。此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。因此,一个越好的自动化网格工具,越能得到好的解决方案。 3.1 ANSYS 13.0 Workbench 网格划分概述 ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。此外,变化参数可以得到即时更新的网 格。ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。 网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。 可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。 ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFX-MESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。【Mesh】组件在项目流程图中直接与其他 Workbench分析系统集成。 3.2 ANSYS 13.0 Workbench 网格划分 ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启 动,如图 3-1 所示。 图3-1 调入分析系统及网格划分组件
网格划分实例详细步骤
一个网格划分实例的详解 该题目条件如下图所示: Part 1:本部分将平台考虑成蓝色的虚线 1. 画左边的第一部分,有多种方案。 方法一:最简单的一种就是不用布置任何初始的2dmesh直接用one volume 画,画出来的质量相当不错。 One volume是非常简单而且强大的画法,只要是一个有一个方向可以 mapped的实体都可以用这个方法来画网格,而事实上,很多不能map的单元也都可以用这个命令来画,所以在对三维实体进行网格划分的时候,收件推荐用one volume来试下效果,如果效果不错的话,就没有必要先做二维单元后再来画。 方法二:先在其一个面上生成2D的mesh,在来利用general选项,这样的优点是可以做出很漂亮的网格。
相比之下:方法二所做出来的网格质量要比一要高。 2. 画第二段的网格,同样演示两种方法: 方法一:直接用3D>solid map>one volume 方法二:从该段图形来看,左端面实际上由3个面组成,右端面由一个部分组成,故可以先将左端面的另两个部分的面网格补齐,再用general选项来拉伸,但是,问题是左面砖红色的部分仅为3D单元,而没有可供拉伸的源面网格,故,应该先用face命令生成二维网格后,再来拉伸,其每一步的结果分见下:
在用general选项时,有个问题需要注意:在前面我们说过,source geom和elemes to drag二选一都可以,但是这里就不一样了,因为source geom选面的话,只能选择一个面,而此处是3个面,所以这里只能选elemes to drag而不能选择source geom.
ICEMCFD网格划分入门基础
WorkBench ICEM CFD 网格划分入门 111AnsysWB里集成了一个非常重要的工具:ICEM CFD。 它是一个建模、划分网格的集成工具,功能非常强大。我也只是蜻蜓点水的用了几次,感觉确实非常棒,以前遇到复杂的模型,用过几个划分网格的工具。但这是我觉得最方便和最具效率的。 网格划分很大程度上影响着后续的仿真分析——相信各位都有所体会。而ICEM CFD特别长于划分六面体网格,相信无论是结构或流体(当然铁别是流体),都会得益于它的威力。 ICEM CFD建模的能力不敢恭维,但划分网格确实有其独到之处。教程开始前,作一个简单的原理介绍,方面没有使用过ICEM CFD的朋友理解主要的任务: 111如下图: 1:白色的物体是我们需要划分网格的,但是它非常不规则。 2:这时候你一定想:怎么这个不规则呢,要是它是一个方方正正的形状多好(例如红色的那个形状)01 111于是有了这样一种思想: 1:对于异型,我们用一种规则形状去描述它。 2:或者说:如果目标形状非常复杂,我们就用很多规则的,简单的形状单元合成在一起,去描述它。 之后,将网格划分的设置,做到规则形状上。 最后,这些规则,通过最初的“描述”关系,自动的“映射”到原先的复杂形状上——问题就得到了解决!!! ICEM CFD正是使用了这种思想。 如下是一个三通管,在ProE里做得
02 在ProE里面直接启动WB 进入WB后,选择如下图: 03 111如下: 1:代表工作空间里的实体 2:代表某实体的子实体,可以控制它们的开关状态3:控制显示的地方
04 下面需要创建一个Body实体 这个实体代表了真实的物体。这个真实的物体的外形由我们导入的外形来定义。 ——我们导入的外形并不是真实的实体。这个概念要清楚。 但是今后基本上不会对这个真实的实体作什么操作。这种处理方式主要是为工作空间内有多个物体的时候准备的。 05 1:点击“创建Body” 2、3:点选这两个点 4:于是创建出一个叫“Body”的实体 操作中,左键选择,中键确认,右键完成并退出——类似的操作方法很多地方用到,要多练习,今后
ANSYS网格划分的一些例子
虽然做出来了.但是我还是有一个问题想请教大家: vsweep和mapp分网后形成网格各有什么规律?如何结合两种方法划分出整齐规则的网格呢. 比如:为什么图中的(1)部分用MAPP划分,(2)部分用SWEEP划分呢就可以出现上图中的那种整齐规则的网格?反过来(1)部分用SWEEP,(2)部分用MAPP划分就不会出现整齐规则的网格呢? 部分(1)和部分(2)不可看成一个整体划分吗? 我试了一个,如果把两个部分看成整体,可以分网但是不会出现那种整齐的网格. 只有掌握了生成网格规律才容易得到合理,整齐,规则的网格,总不能分网时把各种方法都试一遍吧. 恳请各位谈点自己的在分网方面的经验.谢谢 1的三个边如果都设了分段数则sweep和map是一样的 et,1,42 et,2,45 cyl4,,,20 lsel,all lesize,all,,,10
esize,,10 vext,1,,,,,20 aclear,all amesh,1 不过好象中间不大好的!!!还望高手指点! 命令流; et,1,42 et,2,45 blc4,,,10,5 lesize,1,,,5 lesize,2,,,10 mshape,0,2d mshkey,1 amesh,1 esize,,5 vrotat,1,,,,,,1,4 aclear,all
用map也可以,,取其四分之一,单元大小可控制!做了一个!
/PREP7 CYL4, , ,5 RECTNG,-1,1,-1,1, FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,-2 AOVLAP,P51X wpro,,90.000000, wpro,,,45.000000 ASBW, 3 wpro,,,-45.000000 wpro,,,-45.000000 FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,4 ASBW,P51X wpro,,,45.000000 wpro,,90.000000, ET,1,PLANE42 ESIZE,1,0, AMAP,6,12,9,7,8 WPSTYLE,,,,,,,,0 AMAP,7,12,10,5,8 AMAP,3,10,11,6,5 AMAP,5,6,7,9,11 AMAP,2,8,5,6,7 TYPE, 1 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 ET,2,SOLID45 TYPE, 2 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 VOFFST,2,5, , VOFFST,6,5, , VOFFST,7,5, ,
网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量
网格数量直接影响计算精度和计算时耗,网格数量增加会提高计算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小
ANSYS结构有限元分析中的网格划分技术及其应用实例
一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD 模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据
2020年(bi商务智能)Gambit划分搅拌槽网格的步骤
(bi商务智能)Gambit划分搅拌槽网格的步骤
学习软件的练习 参考:《Mixing-WorkshopUGM2003》 硕士论文《涡轮桨搅拌槽内搅拌特性数值模拟研究(张丽娜)》 《Fluent流体计算应用教程》 这是一个自己学习划分结构化与非结构化网格相结合的一个算例。 该算例是一个单轴、圆盘涡轮式搅拌槽的结构,利用Gambit软件对其进行分区、分块处理。Gambit中的设置:建立几何模型——在图纸《同轴搅拌混合器结构尺寸》的基础上修改; 1.圆柱体1:height-4;radius-70;centeredz; 2.圆柱体2:height-22;radius-25;positivez; 3.圆柱体3:height-200;radius-15;positivez; 4.长方体1:width(x)-50;depth(y)-2;height(z)-40;centered; 5.平移长方体1,move-translate-x:75; 6.复制长方体1,得到长方体2、3、4、5、6:copy-5;rotateangle-60; 7.合并上面的所有体,得到轴和桨的几何模型; 8.圆柱体4:height-400;radius-190;centeredz; 9.圆柱体5:height-400;radius-180;centeredz; 10.圆柱体6:height-400;radius-150;centeredz; 11.圆柱体7:height-400;radius-125;centeredz;
12.圆柱体8:height-200;radius-125;centeredz; 13.圆柱体9:height-150;radius-125;centeredz; 14.圆柱体10:height-150;radius-112.5;centeredz; 15.长方体7:width(x)-80;depth(y)-5;height(z)-400;centered; 16.平移长方体7,move-translate-x:165; 17.复制长方体7,得到长方体8、9、10:copy-3;rotateangle-90; 18.Split长方体7、8、9、10:volumes依次选中上述长方体,然后用圆柱体5和6的外圆柱面切割,再把多余的体删除,得到挡板位置的几何模型; 19.挖空最外面的筒体,用圆柱体4减去步骤18中的挡板和步骤7中的轴和桨叶; 20.再依次切割各体,由外到内的顺序去进行体切割split,注意不选中retain项,最后得到8个几何体;然后删除多余出来的几何体,方法是在delete按钮中依次显示各个几何体,把多余的轴和桨叶部分几何体给删除了; 21.创建两个正交垂直的平面,尺寸为:width-400,height-400,zxcentered;利用这两个平面切割split代表最外面筒体的这个几何体,进行4等分;对剩余的(除了包含桨叶部分的第8个体外)的6个几何体,进行2等分;最后删除这两个平面; 22.连接一次所有的几何面,确保没有重合的面存在,再进行一次文件保存的操作; 对上述8个几何体准备并实施网格划分 23.先把动区域部分(包含4个体:上体,中间环体,中间包含轴和桨叶的体,下体)复制并平移出来,再把原来位置上的这一块删除掉,然后再连接一次所有的几何面,保存文件;
各种网格划分方法
各种网格划分方法 1.输入实体模型尝试用映射、自由网格划分,并综合利用多种网格划分控制方法 本题提供IGES 文件 1. 以轴承座为例,尝试对其进行映射,自由网格划分,并练习一般后处理的多种技术,包 括等值图、云图等图片的获取方法,动画等。 2. 一个瞬态分析的例子 练习目的:熟悉瞬态分析过程 瞬态(FULL)完全法分析板-梁结构实例 如图所示板-梁结构,板件上表面施加随时间变化的均布压力,计算在下列已知条件下结构的瞬态响应情况。 全部采用A3钢材料,特性: 杨氏模量=2e112/m N 泊松比=0.3 密度=7.8e33 /m Kg 板壳: 厚度=0.02m 四条腿(梁)的几何特性: 截面面积=2e-42m 惯性矩=2e-84m 宽度=0.01m 高度=0.02m 压力载荷与时间的 关系曲线见下图所示。 图 质量梁-板结构及载荷示意图 0 1 2 4 6 时间(s ) 图 板上压力-时间关系 分析过程 第1步:设置分析标题 1. 选取菜单途径Utility Menu>File>Change Title 。 2. 输入“ The Transient Analysis of the structure ”,然后单击OK 。 第2步:定义单元类型 单元类型1为SHELL63,单元类型2为BEAM4 第3步:定义单元实常数 实常数1为壳单元的实常数1,输入厚度为0.02(只需输入第一个值,即等厚度壳)
实常数2为梁单元的实常数,输入AREA 为2e-4惯性矩IZZ=2e-8,IYY =2e-8宽度TKZ=0.01,高度TKY=0.02。 第5步:杨氏模量EX=2e112/m N 泊松比NUXY=0.3 密度DENS=7.8e33 /m Kg 第6步:建立有限元分析模型 1. 创建矩形,x1=0,x2=2,y1=0,y2=1 2. 将所有关键点沿Z 方向拷贝,输入DZ =-1 3. 连线。将关键点1,5;2,6;3,7;4,8分别连成直线。 4. 设置线的分割尺寸为0.1,首先给面划分网格;然后设置单元类型为2,实常数为2, 对线5到8划分网格。 第7步:瞬态动力分析 1. 选取菜单途径Main Menu>Solution>-Analysis Type-New Analysis ,弹出New Analysis 对话框。 2. 选择Transient ,然后单击OK ,在接下来的界面仍然单击OK 。 3. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Damping , 弹出Damping Specifications 窗口。 4. 在Mass matrix multiplier 处输入5。单击OK 。 5. 选取菜单途径Main Menu > Solution > -Loads-Apply > -Structural- Displacement>On Nodes 。弹出拾取(Pick )窗口,在有限元模型上点取节点232、242、252和262,单击OK ,弹出Apply U,ROT on Nodes 对话框。 6. 在DOFS to be constrained 滚动框中,选种“All DOF ”(单击一次使其高亮度显示, 确保其它选项未被高亮度显示)。单击OK 。 7. 选取菜单途径Utility Menu>Select>Everything 。 8. 选取菜单途径Main Menu>Solution>-Load Step Opts-Output Ctrls>DB/Results File ,弹出Controls for Database and Results File Writing 窗口。 9. 在Item to be controlled 滚动窗中选择All items ,下面的File write frequency 中选择Every substep 。单击OK 。 10. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。 11. 在Time at end of load step 处输入1;在Time step size 处输入0.2;在Stepped or ramped b.c 处单击ramped ;单击Automatic time stepping 为on ;在Minimum time step size 处输入0.05;在Maximum time step size 处输入0.5。单击OK 。 12. 选取菜单途径Main Menu>Solution>-Loads-Apply>-Structure-Pressure>On Areas 。弹出Apply PRES on Areas 拾取窗口。 13. 单击Pick All ,弹出Apply PRES on Areas 对话框。 14. 在pressure value 处输入10000。单击OK 15. 选取菜单途径Main menu>Solution>Write LS File ,弹出Write Load Step File 对 话框。 16. 在Load step file number n 处输入1,单击OK 。 17. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。
gambit轴流风机网格划分
BASIC TURBO MODEL WITH UNSTRUCTURED MESH 8. BASIC TURBO MODEL WITH UNSTRUCTURED MESH This tutorial employs a simple turbine blade configuration to illustrate the basic turbo modeling functionality available in GAMBIT. It illustrates the steps and procedures required for importing data that describes the turbo blade, creating a geometric model that describes the flow region surrounding the blade, meshing the model, and exporting the mesh. The example presented here uses 3-D boundary layers to control the shape of the mesh in the regions immediately adjacent to the blade and employs an unstructured hexa-hedral mesh. In this tutorial, you will learn how to: ?Import a turbo data file ?Create a turbo profile ?Modify a turbo profile to affect the shape of a turbo volume ?Create a turbo volume ?Define turbo zones ?Apply 3-D boundary layers to a turbo volume ?Mesh a turbo volume ?View a turbo volume mesh using both 3-D and 2-D perspectives ?Export a turbo volume mesh 8.1 Prerequisites Prior to reading and performing the steps outlined in this tutorial, you should familiarize yourself with the steps, principles, and procedures described in Tutorials 1, 2, 3, and 4. ? Fluent Inc., Mar-06 8-1
000-Gambit网格划分(自己重新排版)
Gambit网格划分 一、Gambit的操作界面 (2) 二、二维建模 (5) (一)计算域的确立 (5) (二)创建点(vertex) (5) (三)线的创建(Line) (8) (四)面(Face)的创建 (9) 三、网格的划分 (10) (一)边界层网格的创建 (10) (二)创建边上的网格点数 (11) (三)划分面的网格 (12) (四)边界的定义 (14) (五)保存和输出 (15) 四、三维建模 (16) (一)三视图的使用 (16) (二)基本三维模型的建立 (17) (三)引入CAD图形 (21) 五、二维轴对称维多辛斯基曲线喷嘴 (22) (一)在Autocad中创建维多辛斯基曲线 (22) (二)输出为ACIS的.sat文件 (22) (三)在gambit 中输入.sat文件 (22) (五)划分网格 (23) (六)定义边界条件 (24) 六、三维双孔喷嘴 (26) (一)创建几何体 (26) (二)重新划分几何体 (28) (三)划分网格 (29)
一、Gambit的操作界面 网格的划分使用Gambit软件,首先要启动Gambit,在Dos下输入Gambit
gambit网格划分的评价标准
如何检查网格质量,用什么指标来说明网格好不好呢?怎么控制? 一般是什么原因造成的? 一般也就是,网格的角度,网格变形的梯度等等吧 判断网格质量的方面有很多,不知你用的是什么软件,下面总结的是针对Gambit帮助文件的简单归纳,不同的软件有不同的评价单元质量的指标,使用 时最好仔细阅读帮助文件。 Area单元面积,适用于2D单元,较为基本的单元质量特征。 Aspect Ratio长宽比,不同的网格单元有不同的计算方法,等于1是最好的 单元,如正三角形,正四边形,正四面体,正六面体等;一般情况下不要超过5:1. Diagonal Ratio对角线之比,仅适用于四边形和六面体单元,默认是大于或 等于1的,该值越高,说明单元越不规则,最好等于1,也就是正四边形或正六 面体。 Edge Ratio长边与最短边长度之比,大于或等于1,最好等于1,解释同上。 EquiAngle Skew通过单元夹角计算的歪斜度,在0到1之间,0为质量最好, 1为质量最差。最好是要控制在0到0.4之间。 EquiSize Skew通过单元大小计算的歪斜度,在0到1之间,0为质量最好,1为质量最差。2D质量好的单元该值最好在0.1以内,3D单元在0.4以内。 MidAngle Skew通过单元边中点连线夹角计算的歪斜度,仅适用于四边形和 六面体单元,在0到1之间,0为质量最好,1为质量最差。 Size Change相邻单元大小之比,仅适用于3D单元,最好控制在2以内。 Stretch伸展度。通过单元的对角线长度与边长计算出来的,仅适用于四边 形和六面体单元,在0到1之间,0为质量最好,1为质量最差。 Taper锥度。仅适用于四边形和六面体单元,在0到1之间,0为质量最好, 1为质量最差。 Volume单元体积,仅适用于3D单元,划分网格时应避免出现负体积。 Warpage翘曲。仅适用于四边形和六面体单元,在0到1之间,0为质量最好,1为质量最差。 另外,在Fluent中的窗口键入:grid quality 然后回车,Fluent能检查网格的 质量,主要有以下三个指标: 1.Maxium cell squish: 如果该值等于1,表示得到了很坏的单元; 2.Maxium cell skewness: 该值在0到1之间,0表示最好,1表示最坏; 3.Maxium 'aspect-ratio': 1表示最好。
Gambit网格划分实例
Gambit网格划分实例 GAMBIT圆/圆柱体的高质量网格划分(钱币划分) 1)先在opteration--geometry-volumn中创建了一个高为100,半径15的圆柱体。然后再圆柱的底面建立了一个边长为8的正方形,将正方形旋转45度,使正方形的一个顶点跟底面圆的点对齐,然后将圆周分割为4等分,将这4个顶点和正方形的四个顶点连成线,效果如图所示: 2)然后用这四条线沿Z轴正向的矢量方向长出4个面,效果如图:
3)用正方形去分割底面圆,注意选择connected选项,再用刚才形成的四个面去分割那个古钱形的 底面,把它分成4部分,如果做到这一步,基本难的地方就过去了,效果如图所示:
4)下面就是把对应边划分网格,注意正方形每条边对应的圆弧边划分的网格份数是一样的,效果如图: 5)划分面网格,选择map结构的四边形网格,效果如图: 6)最后划分体网格,按照cooper方式的六面体网格来划分,效果如图:
如何用gambit生成机翼结构网格 现在很多新手在用gambit划分网格的时候,习惯性的直接生成体网格,这样做确实简单,但是简单省力的同时就蕴藏着风险,当遇到复杂外形的时候,就长不了结构网格或者是生成的网格质量很差,为什么会这样,因为要划分一套高质量的网格,在gambit中直接划分体网格是不恰当滴。 那如何在gambit中划分结构网格呢,了解pointwise或者icem的同学都知道,这些牛b软件划分网格的思路都是分区,所以要在gambit中划分结构网格,其基本思路也是要分区,想偷懒直接划分体网格是行不通的哦。 下面开始讲课: 1.导入实体
hypermesh六面体网格划分指导(含实例)
1. 网格划分 1.1 Hypermesh 中六面体网格划分的功能介绍 ?六面体网格划分的工具主要有: ?Drag ?Spin ?Line drag ?element offset ?solid map ?其中solid map集成了部分其它功能; 1.1.1:drag 面板 此面板的功能是在二维网格接触上沿着一个线性路径挤压拉伸而形成三维实体单元。要求: 1)有初始的二维网格; 2)截面保持不变:相同尺寸,相同曲率和空间中的相同方向; 3)线性路径。 1.1.2:spin 面板 -1-
此面板的功能是在二维网格基础上沿着一个旋转轴旋转一定角度形成三维实体单元。要求: 1)有初始的二维网格; 2)界面保持不变; 3)圆形路径; 4)不能使用在没有中心孔的实体部件上。 1.1.3:line drag 面板 此面板的功能上在二维网格的基础上沿着一条线拉伸成三维实体单元。 要求: 1)初始的二维网格; 2)截面保持不变; 3)有一条定义的曲线或直线路径。 1.1.4:element offset 面板 此面板的功能是在二维网格的基础上沿着法线方向偏置挤压形成三维实体单元。 要求: 1)初始的二维网格; 2)截面可以是非平面的; -2-
-3- 3) 常厚度或者近似常厚度。 1.1.5:soild map 面板 此面板的功能是在二维网格基础上,首先挤压网格,然后将挤压的网格映射到一个由几何要 素定义的实体中,从而形成三维实体单元。 1.2 drag 面板网格划分指导 导入几何,drag 实体之前必须先生成2D 网格,如下图 拉伸的距离 定义方向 需要拉伸的层数
有限元网格划分方法与基本原理
结构有限元分析中的网格划分技术及其应用实例 结构有限元分析中的网格划分是否直接关系到解算的效果。本文简述了网格划分应用的基本理论,并以空间自由曲面覆盖件和大型整体网络钢筋壳体产品的有限元分析中的网格划分为实例对象,详细讲述了空间自由和三维实体的网格划分基本理论及其在工程中的实际应用,非常具有现实意义和借鉴价值。 一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而 CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠 CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距 CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、 SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据交