FFT 与小波变换的区别---FFT的缺陷
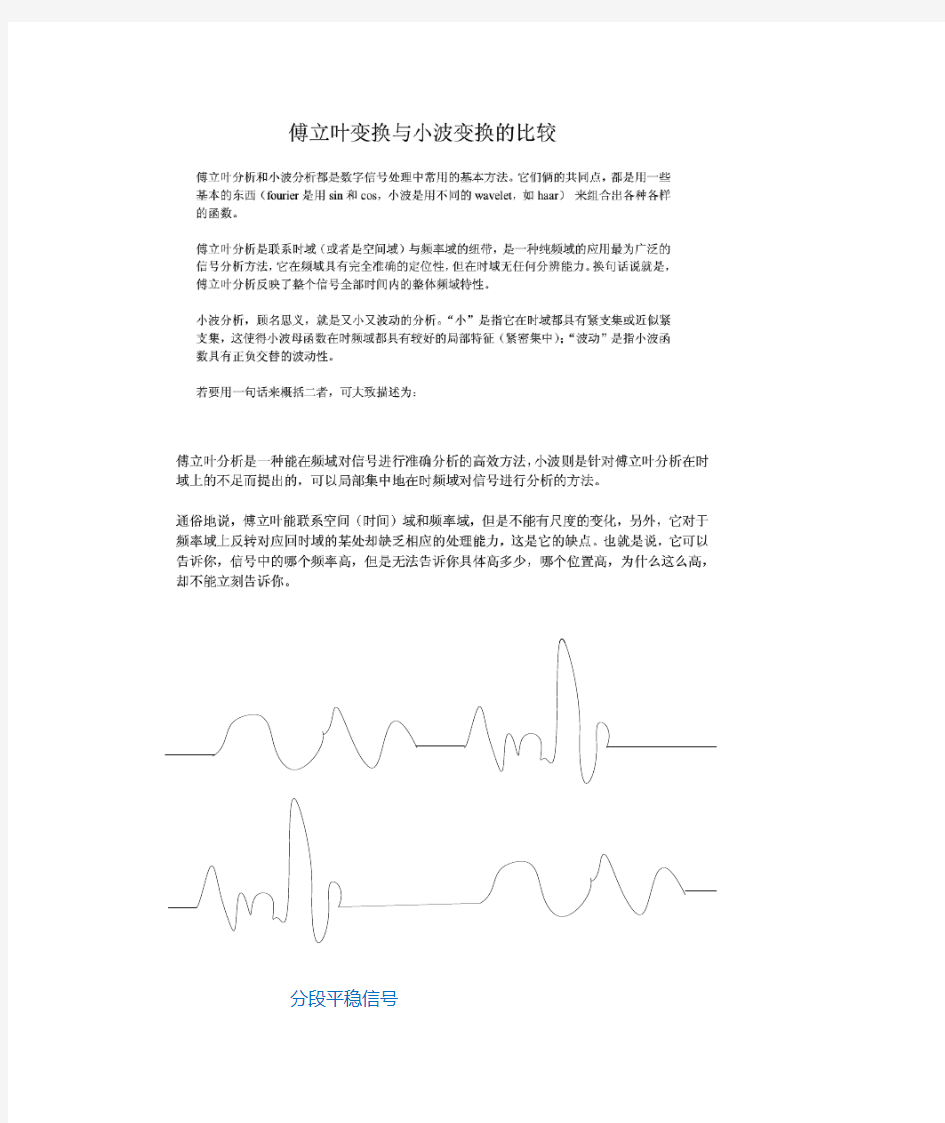

分段平稳信号
这两种波形的FFT完全一样!完全分不出信号出现的位置,说明傅里叶变换缺乏时间对频率的定位功能。小波则可以还原。经过傅里叶变换
之后得到的是频域的信息,时间信息完全丢失,很多人会问那为什么逆变换可以完全恢复原始信号?其实,这个可以理解为三维空间离得变换,这里涉及到泛函的一些知识,其通俗理解方法也将在下边进行解释。傅里叶逆变换同样可以理解为相关,只是此时需保证变换时t不变,也就是计算某时刻不同频率波形与傅里叶变换之后的频域信号之间的相关,积分后得到该时刻各频率分量在该时刻的总贡献。可以知道所有有关时间的信息都是由e^(ift)导出的。
傅里叶变换:
1)首先傅里叶变换是傅里叶级数(有限周期函数)向(无限周期函数)的扩展,将该函数展开成无限多个任意周期的正弦或余弦函数的和(或积分)。
2)傅里叶级数中各项系数例如cosx项系数是原函数与其在某一定义域内的积分,显然我们可以将该过程理解为对这两个函数进行相关,将相关系数作为该频率处的强度。
3)经过傅里叶变换之后得到的是频域的信息,时间信息完全丢失,很多人会问那为什么逆变换可以完全恢复原始信号?其实,这个可以理解为三维空间离得变换,这里涉及到泛函的一些知识,其通俗理解方法也将在下边进行解释。傅里叶逆变换同样可以理解为相关,只是此时需保证变换时t不变,也就是计算某时刻不同频率波形与傅里叶变换之后的频域信号之间的相关,积分后得到该时刻各频率分量在该时刻的总贡献。可以知道所有有关时间的信息都是由e^(ift)导出的。
4)从泛函的角度,我们可以把傅里叶级数中的三角函数
{1/sqrt(2π),sin(t)/sqrt(π),cos(t)/sqrt(π),...}看做一个线性函数空间的一个基,这里与线性代数里的线性空间有两点不同,第一该处是函数空间,每个元素都是一个函数而不是一个数,第二这里是无限维空间,基有无限多个元素。但是这并不影响我们的理解。我们可以像在有限维线性空间中那样将傅里叶变换理解为这个函数在以三角函数为基的空间的展开,而将傅
里叶逆变换理解为一个旋转(或其他变换),举个例子:一个立方体,正着放的时候我们看到的是正面(频域),当我们旋转一下,我们可能看到其他面比如反面(时域)。
短时傅里叶变换:
由上叙述可知傅里叶变换之后的图像仅包含频域信息,丢失了时域信息,在那些同时需要频域和时域信息的时候(在什么时候存在哪些频率)就显得无能为力,因此出现了短时傅里叶变换,短时傅里叶变换认为在一个小的时间段deltat内信号是稳定的,信号包含的频率是不变的,利用一个窗口函数与原始函数卷积,在特定的时间仅计算该时间前后共deltat时间内的信号的傅里叶变换作为该时间点的傅里叶变换,即该时刻的频谱。
小波变换:
虽然短时傅里叶变换可以解释一些问题,但是由于窄的窗口函数时间分辨率高但是频率分辨率低,而宽的窗口函数频率分辨率高但时间分辨率低,低频信号时间分辨率较低而频率分辨率较高,此处时间分辨率低很容易理解,因为波长越长,他在不同的时段的贡献就越多,前几个时段或后几个时段都可能也包含了部分信号导致针对某一频率在时间变化时得到的相关系数变化缓慢,尖峰较宽,分辨率低,对于频率分辨率不是很好理解,我是这样理解的,低频信号波长较长,在于原始信号相关时微小变化对相关系数影响大,而高频信号波长短,频率的微小变换对相关系数的影响不是很明显。而短时傅里叶变换窗口大小固定,不能同时得到较好的时间和频率分辨率。
这样便产生了小波,小波可以理解为是在短时傅里叶变换的基础上对窗口函数增加了一个尺度因子,该尺度因子随着频度变化而变化,使得在低频时降低窗口宽度增加时间分辨率而在高频时增加窗口宽度增加频率分辨率。
暂时写到这里,各位有什么精彩的理解或指教尽管发言,谢谢。
来源:李端顺
|分享(35)|浏览(113)
源地址: https://www.360docs.net/doc/9116743870.html,/GetEntry.do?id=495880219&owner=229912909
傅立叶变换的缺点
傅里叶变换具有良好的性质,能够实现时域到频域相互转换,它实质是将f(t)这个波形分解成许多不同频率的正弦波的叠加。这样我们就可以把对原函数f(t)的研究转化为不同频率分量的幅值和相位的研究。
从傅里叶变换公式可以看出,它是以正弦波及其高次谐波为标准基的,因此它是对信号的一种总体上的分析,具有单一的局部定位能力,也就是在时域的良好定位是以频域的全部信号分析为代价的,对频域的良好定位是以时域的全部信号分析为代价的,时域和频域分析具有分析上的矛盾,傅立叶变换的频率谱中要么频率是准确的而时间是模糊的,要么时间是准确的而频率是模糊的,它不可能同时在时域和频域都具有良好的定位的能力。傅立叶变换是建立在平稳信号的基础上的,在非平稳时变信号的分析上,它却无能为力。
傅立叶变换把信号的时域特征和频域特征联系在一起,使我们可以从信号的时域和频域两个角度观察和分析信号,但是二者却是绝对分离的,即在频域不包含任何时域信息,在时域中同样找不到任何频域信息的影子。对于傅立叶频谱中的某一频率,不知道这一频率是何
时产生的,只能从全局上分析信号。这样在信号分析中就面临一对最基本的矛盾:时域和频域的局部化矛盾。
基于matlab谐波抑制的仿真研究(毕设)
电力系统谐波抑制的仿真研究 目 录 1 绪论…………………………………………………………………………… 1.1 课题背景及目的………………………………………………………… 1.2国内外研究现状和进展………………………………………………… 1.2.1国外研究现状 …………………………………………………… 1.2.1国内研究现状 …………………………………………………… 1.3 本文的主要内容…………………………………………………………… 2 有源电力滤波器及其谐波源研究……………………………………………… 2.1 谐波的基本概念………………………………………………………… 2.1.1 谐波的定义……………………………………………………… 2.1.2谐波的数学表达………………………………………………… 2.1.3电力系统谐波标准………………………………………………… 2.2 谐波的产生……………………………………………………………… 2.3 谐波的危害和影响……………………………………………………… 2.4 谐波的基本防治方法…………………………………………………… 2.5无源电力滤波器简述…………………………………………………… 2.6 有源电力滤波器介绍…………………………………………………… 2.6.1 有源滤波器的基本原理.……………………………………… 2.6.2 有源电力滤波器的分类.……………………………… 2.7并联型有源电力滤波器的补偿特性…………………………………… 2.7.1谐波源………………………………………………………… 2.7.2有源电力滤波器补偿特性的基本要求…………………………… 2.7.3影响有源电力滤波器补偿特性的因素…………………………… 2.7.4并联型有源电力滤波器补偿特性……………………………… 2.8 谐波源的数学模型的研究……………………………………………… 2.8.1 单相桥式整流电路非线性负荷………………………………… 2.8.2 三相桥式整流电路非线性负荷.………………………………… 3 基于瞬时无功功率的谐波检测方法…………………………………………… 3.1谐波检测的几种方法比较…………………………………………… 3.2三相电路瞬时无功功率理论…………………………………………… 3.2.1瞬时有功功率和瞬时无功功率……………………………………… 3.2.2瞬时有功电流和瞬时无功电流……………………………………… 3.3 基于瞬时无功功率理论的p q -谐波检测算法.…………………… 3.4基于瞬时无功功率理论的p q i i -谐波检测法.…………………… 4并联有源电力滤波器的控制策略…………………………………………… 4.1并联型有源电力滤波器系统构成及其工作原理………………………… 4.2并联有源电力滤波器的控制研究.……………………………… 4.2.1并联有源电力滤波器直流侧电压控制…………………… 4.2.2有源电力滤波器电流跟踪控制技术…………………………… 4.2.2.1 PWM 控制原理………………………………………… 4.2.2.2滞环比较控制方式………………………………………… 4.2.2.3三角波比较方式………………………… 4.3有源电力滤波器的主电路设计 …………………………………………
基于MATLAB的电力谐波分析
目录 摘要 (2) Abstract (2) 1:绪论 (2) 1.1课题背景 (2) 1.2谐波的产生 (3) 1.3电网中谐波的危害 (5) 1.4研究谐波的重要性 (5) 2:谐波的限制标准和常用措施 (7) 2.1国外谐波的标准和规定 (8) 2.1.1谐波电压标准 (8) 2.1.2谐波电流的限制 (9) 2.2我国谐波的标准和规定 (9) 2.2.1谐波电压标准 (10) 2.2.2谐波电流的限制 (11) 2.3谐波的限制措施 (12) 3:谐波的检测与分析 (15) 3.1电力系统谐波检测的基本要求 (15) 3.2国内外电力谐波检测与分析方法研究现状 (15) 3.3谐波的分析 (18) 3.3.1电力系统电压(或电流)的傅立叶分析 (19) 3.3.2基于连续信号傅立叶级数的谐波分析 (19) 4:电力谐波基于FFT的访真 (21) 4.1快速傅立叶变换的简要和计算方法 (21) 4.1.1快速傅立叶变换的简要 (21) 4.1.2快速傅立叶变换的计算方法 (21) 4.2 FFT应用举例 (22) 5:结论 (28) 附录: (28) 参考文献: (30) 致谢: (30)
基于MATLAB的电力谐波分析 学生: 指导老师: 电气信息工程学院 摘要:电力系统的谐波问题早在20世纪20年代就引起人们的注意,到了50年代和60年代,由于高压直流输电技术的发展,发表了有关换流器引起电力系统谐波问题的大量论文。70年代以来,由于电力电子技术的飞速发展,各种电力电子装置在电力系统、工业、交通及家庭中的应用日益广泛,谐波所造成的危害也日趋严重。世界各国都对谐波问题予以充分的关注。 本文首先对目前国内外电力谐波检测与分析方法进行了综述与展望,并对电力谐波的基本概念、性质和特征参数进行了详细的分析,给出了谐波抑制的措施。并得出基于连续信号傅立叶级数的各次谐波系数的计算公式,推导了该计算公式与MATLAB函数FFT计算出的谐波系数的关系。实例证明:准确测量各次谐波参数,对电力系统谐波分析和抑制具有很大意义,可确保系统安全、可靠、经济地运行。同时实验结果表明,该法对设备要求不高,易于实现。 关键字:MA TLAB电力谐波分析 Harmonic Analysis of Electric Power System Based On Matlab Student: Teacher: Electrical and Information Engineering Abstract:The harmonic problem of electric power system has caused the attention of people in1920s and 1930s.Until 1950s,owing to the development of high voltage direct current transportation electricity technology,people published a large number of theses about the electricity power system harmonic problem,which caused by the current transform device.Since 1970s,because of the speedly development of eletricity power electronics technology,the various electric power electronics devices were applied extensively in the electric power system,industry,traffic and family,but the harm which the harmonic creates was serious more and more.Many country of the world all pay attention to the harmonic problem. Summary and Prospects of the first domestic and international power harmonics detection and analysis methods, and power harmonics of the basic concepts of the nature and characteristic parameters of a detailed analysis, given a harmonic suppression measures. Obtained based on the
拉格朗日插值公式的证明及其应用
拉格朗日插值公式的证明及其应用 摘要: 拉格朗日(Lagrange)插值公式是多项式中的重要公式之一,在理论和实践中都有着广泛的应用.本文阐述了Lagrange 插值的基本理论,譬如:线形插值,抛物插值,Lagrange 多项式等.然后将线形插值,抛物插值,Lagrange 多项式插值分别应用到高中知识中,并且学会用计算机程序来编写.插值法的思想与中国剩余定理一脉相承, 体现了代数中"线性化" (即表示为求和和数乘的形式) 这一基本思路, 大巧若拙.本文的目的是通过介绍拉格朗日插值公式的推导,唯一性,证明过程及其在解题与实际生活问题中的应用来寻找该公式的优点,并且引人思考它在物理,化学等领域的应用.通过实际鉴定过程,利用插值公式计算生活中的成本问题,可以了解它的计算精度高,方法快捷. 关键词: 拉格朗日插值公式 唯一性 证明 解题应用 资产评估 曲线插值问题,直观地说,认为已知的一批数据点()n k k k f x 0,=是准确的,这些数据点所表现的 准确函数关系()x f 是未知的,在这种情况下要作一条近似曲线()x P 且点点通过这些点,插值问题不仅要讨论这种近似曲线()x P 的构造方法,还要讨论点增多时这种近似曲线()x P 是否稳定地收敛于未知函数()x f ,我们先研究一种简单常用的插值——拉格朗日插值. 一.定义,推导及其在解题中的应用 1.线性插值 1.1. 线性插值的定义 假定已知区间[]1,+k k x x 的端点处的函数值()k k x f y =, ()11++=k k x f y ,要求线性插值多项式()x L 1使它满足()k k y x L =1, ()111++=k k y x L . ()x L y 1=的几何意义:通过两点()k k y x ,和()11,++k k y x 的直线, 如图1所示,()x L 1的表达式由几何意义直接给出,即 ()()k k k k k k x x x x y y y x L ---+ =++111 (点斜式), 图1 ()11111++++--+--= k k k k k k k k y x x x x y x x x x x L (两点式). y=L 1x () y=f x () y k+1 y k x k+1 x k o y x
数值计算方法—拉格朗日插值
数值计算方法作业 专业:测控1002 学号:10540226 姓名:崔海雪
拉格朗日插值的算法及应用 【摘要】 本文简介拉格朗日插值,它的算法及程序和拉格朗日在实际生活中的运用。运用了拉格朗日插值的公式,以及它在MATLAB 中的算法程序,并用具体例子说明。拉格朗日插值在很多方面都可以运用,具有很高的应用价值。 【关键词】 拉格朗日;插值;公式;Matlab 算法程序; 一、绪论 约瑟夫·拉格朗日(Joseph Louis Lagrange),法国数学家、物理学家。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方面的成就最为突出。拉格朗日对流体运动的理论也有重要贡献,提出了描述流体运动的拉格朗日方法。数据建模有两大方法:一类是插值方法,另一类是拟合函数一般的说,插值法比较适合数据准确或数据量小的情形。然而Lagrange 插值有很多种,1阶,2阶,…n 阶。我们可以利用拉格朗日插值求方程,根据它的程序求原方程的图像。下面我具体介绍分析一下拉格朗日插值的算法设计及应用。 二、正文 1、基本概念 已知函数y=f(x)在若干点i x 的函数值i y =()i x f (i=0,1,???,n )一个差值问题就是求一“简单”的函数p(x):p(i x )=i y ,i=0,1,???,n, (1) 则p(x)为f(x)的插值函数,而f(x)为被插值函数会插值原函数,0x ,1x ,2x ,...,n x 为插值节点,式(1)为插值条件,如果对固定点-x 求f(-x )数值解,我们称- x 为一个插值节点,f(-x )≈p(-x )称为-x 点的插值,当-x ∈[min(0x ,1x ,2x ,...,n x ),max(0x ,1x ,2x ,...,n x )]时,称为内插,否则称为外插式外推,特别地,当p(x)为不超过n 次多项式时称为n 阶Lagrange 插值。 2、Lagrange 插值公式 (1)线性插值)1(1L 设已知0x ,1x 及0y =f(0x ) ,1y =f(1x ),)(1x L 为不超过一次多项式且满足 )(01x L =0y ,)(11x L =1y ,几何上,)(1x L 为过(0x ,0y ) ,(1x ,1y )的直线,从而得到 )(1x L =0y +0101x x y y --(x-0x ). (2)
三次样条插值作业题
例1 设)(x f 为定义在[0,3]上的函数,有下列函数值表: 且2.0)('0=x f ,1)('3-=x f ,试求区间[0,3]上满足上述条件的三次样条插值函数)(x s 本算法求解出的三次样条插值函数将写成三弯矩方程的形式: ) ()6()() 6()(6)(6)(211123 13 1j j j j j j j j j j j j j j j j x x h h M y x x h h M y x x h M x x h M x s -- + -- + -+ -= +++++其中,方程中的系数 j j h M 6, j j h M 61+,j j j j h h M y )6(2- , j j j j h h M y ) 6(211++- 将由Matlab 代码中的变量Coefs_1、Coefs_2、Coefs_3以及Coefs_4的值求出。 以下为Matlab 代码: %============================= % 本段代码解决作业题的例1 %============================= clear all clc % 自变量x 与因变量y ,两个边界条件的取值 IndVar = [0, 1, 2, 3]; DepVar = [0, 0.5, 2, 1.5]; LeftBoun = 0.2; RightBoun = -1; % 区间长度向量,其各元素为自变量各段的长度 h = zeros(1, length(IndVar) - 1); for i = 1 : length(IndVar) - 1 h(i) = IndVar(i + 1) - IndVar(i); end % 为向量μ赋值
matlab信号仿真谐波
综合训练① 实验内容:利用matlab绘制频率自定的正弦信号(连续时间和离散时间),复指数信号(连续时间),并举例实际中哪些物理现象可以用正弦信号,复指数信号来表示。绘制成谐波关系的正弦信号(连续时间和离散时间),分析其周期性和频率之间的关系。实验步骤: 一、绘制谐波关系的正弦信号 分析:由于正弦信号可以表示成两个共轭的复指数信号相减,然后再除去两倍的单位虚数得到,故,我们将正弦信号设置为 X=exp(j*pi*n/4)-exp(-j*pi*n/4))/(2*j) 此信号就相当于 x=sin(pi*n/4) 设计程序如下: n=[0:32]; %设置n的取值 x=(exp(j*pi*n/4)-exp(-j*pi*n/4))/(2*j); %限定离散正弦信号 stem(n,x) %绘制该离散正弦信号 通过Matlab所得图形如下:
分析:同样的连续型的正弦信号同样也可以用类似方式绘制. x=sym('(exp(j*pi*t/T)+exp(-j*pi*t/T))/2');%函数表示正弦信号 x5=subs(x,5,'T'); %设置周期大小ezplot(x5,[0,10]) %绘制图形 所得结果如下:
二、绘制复指数信号 分析:由于复指数信号有实数部分和虚数部分,所以绘制其图形,我们采取了分别绘制的方法,将实数和虚数分别画出。 实验程序如下: t=[0:.01:10]; %产生时间轴的等差点 y=exp((1+j*10)*t); %设置复指数信号 subplot(211),plot(t,real(y)); %绘制实数信号图形 grid subplot(212),plot(t,imag(y)); %绘制虚数部分图形 grid 实验所得结果如下:
用matlab进行fft谐波分析
FFT是离散傅立叶变换的快速算法,可以将一个信号变换到频域。有些信号在时域上是很难看出什么特征的,但是如果变换到频域之后,就很容易看出特征了。这就是很多信号分析采用FFT变换的原因。另外,FFT可以将一个信号的频谱提取出来,这在频谱分析方面也是经常用的。 虽然很多人都知道FFT是什么,可以用来做什么,怎么去做,但是却不知道FFT之后的结果是什意思、如何决定要使用多少点来做FFT。 现在就根据实际经验来说说FFT结果的具体物理意义。一个模拟信号,经过ADC采样之后,就变成了数字信号。采样定理告诉我们,采样频率要大于信号频率的两倍,这些我就不在此罗嗦了。 采样得到的数字信号,就可以做FFT变换了。N个采样点,经过FFT之后,就可以得到N个点的FFT结果。为了方便进行FFT运算,通常N取2的整数次方。 假设采样频率为Fs,信号频率F,采样点数为N。那么FFT之后结果就是一个为N点的复数。每一个点就对应着一个频率点。这个点的模值,就是该频率值下的幅度特性。具体跟原始信号的幅度有什么关系呢?假设原始信号的峰值为A,那么FFT的结果的每个点(除了第一个点直流分量之外)的模值就是A的N/2倍。而第一个点就是直流分量,它的模值就是直流分量的N倍。而每个点的相位呢,就是在该频率下的信号的相位。第一个点表示直流分量(即0Hz),而最后一个点N的再下一个点(实际上这个点是不存在的,这里是假设的第N+1个点,也可以看做是将第一个点分做两半分,另一半移到最后)则表示采样频率Fs,这中间被N-1个点平均分成N等份,每个点的频率依次增加。例如某点n所表示的频率为:Fn=(n-1)*Fs/N。由上面的公式可以看出,Fn所能分辨到频率为为Fs/N,如果采样频率Fs 为1024Hz,采样点数为1024点,则可以分辨到1Hz。1024Hz的采样率采样1024点,刚好是1秒,也就是说,采样1秒时间的信号并做FFT,则结果可以分析到1Hz,如果采样2秒时间的信号并做FFT,则结果可以分析到0.5Hz。如果要提高频率分辨力,则必须增加采样点数,也即采样时间。频率分辨率和采样时间是倒数关系。 假设FFT之后某点n用复数a+bi表示,那么这个复数的模就是An=根号a*a+b*b,相位就是Pn=atan2(b,a)。根据以上的结果,就可以计算出n点(n≠1,且n<=N/2)对应的信号的表达式为:An/(N/2)*cos(2*pi*Fn*t+Pn),即2*An/N*cos(2*pi*Fn*t+Pn)。对于n=1点的信号,是直流分量,幅度即为A1/N。 由于FFT结果的对称性,通常我们只使用前半部分的结果,即小于采样频率一半的结果。 好了,说了半天,看着公式也晕,下面以一个实际的信号来做说明。 假设我们有一个信号,它含有2V的直流分量,频率为50Hz、相位为-30度、幅度为3V 的交流信号,以及一个频率为75Hz、相位为90度、幅度为1.5V的交流信号。用数学表达式就是如下: S=2+3*cos(2*pi*50*t-pi*30/180)+1.5*cos(2*pi*75*t+pi*90/180) 式中cos参数为弧度,所以-30度和90度要分别换算成弧度。我们以256Hz的采样率对这个信号进行采样,总共采样256点。按照我们上面的分析,Fn=(n-1)*Fs/N,我们可以知道,每两个点之间的间距就是1Hz,第n个点的频率就是n-1。我们的信号有3个频率:0Hz、50Hz、75Hz,应该分别在第1个点、第51个点、第76个点上出现峰值,其它各点应该接近0。实际情况如何呢?我们来看看FFT的结果的模值如图所示。
试求三次样条插值S(X)
给定数据表如下: 试求三次样条插值S(X),并满足条件: i)S’(0.25)=1.0000, S’(0.53)-0.6868; ii) S”(0.25)= S”(0.53)=0; 解: 由给定数据知: h0 =0.3-0.25 - 0.05 , h 1=0.39-0.30-0.09 h 2=0.45-0.39-0.06, h 3=0.53-0.45-0.08 由μ i=h i/(h i1+h i), λ i= h i/(h i1+h i) 得: μ1= 5/14 ; λ 1= 9/14 μ2= 3/5 ; λ 2= 2/5 μ3= 3/7 ; λ 3=4/7 0.25 0.5000 ﹨ ﹨ 1.0000 ∕﹨ 0.25 0.5000 ∕ -0.9200-f[x 0,x 0, x 1 ] ﹨∕ 0.9540 ∕﹨ 0.30 0.5477 -0.7193-f[x 0,x 1,x 2 ] ﹨∕
0.8533 ∕﹨ 0.39 0.6245 -0.5440-f[x1,x2,x 3 ] ﹨∕ 0.7717 ∕﹨ 0.45 0.6708 -0.4050-f[x 2,x 3,x 4 ] ﹨∕ 0.7150 ∕﹨ 0.53 0.7280 -0.3525-f[x 3,x 4,x 5 ] ﹨∕ 0.6868 ∕ 0.53 0.7280 i)已知一节导数边界条件,弯矩方程组 ┌┐┌┐ │ 2 1 │┌M 0 ┐│-0.9200 ︳ ︳5/14 2 9/14 ︳︳M ︳︳-0.7193 ︳ 1 ︳3/5 2 2/5 ︳︳M 2 ︳_6 ︳-0.5440︳ ︳ 3/7 2 4/7 ︳︳M ︳︳-0.4050 ︳ 3
插值算法之拉格朗日插值
记一下拉格朗日插值公式的推导和一些要点【这里说的都是二维插值,多维上的以此类推】 1、插值问题:在做实验的过程中,往往得到一堆离散的数据,现在想用数学公式模拟这堆离散数据。怎么办,数学家们提出了插值问题。插值问题的提法是这样的给定一堆数据点(x0, y0), (x1, y1), (x2, y2)...(xn, yn),要求一个函数y = f(x) ,要求该函数经过上面所有的数据点。 2、多项式插值及其唯一性:在所有的函数中,多项式函数是最简单的函数,所以只要是人就会想到用多项式函数来作为插值函数,好,以上给定了n+1个点,现在要求一个n次多项式y = an * x^n + ... a1 * x + a0, 使它们经过这n+1个点;通过范德蒙行列式和克莱姆法则,可以判定如果这n+1个点的x值各不相同,那么这个多项式是唯一的。结果唯一,但是用直接法很不好求。现在用别的办法来求之。这就是:拉格朗日多项式 3、拉格朗日多项式的构造,以四个点为例子进行说明 由于函数经过4个点(x0, y0),(x1, y1),(x2, y2),(x3, y3),所以可以设函数为: f(x) = b0(x) * y0 + b1(x) * y1 + b2(x) * y2 + b3(x) * y3 注意:b0(x),...,b3(x)都是x的3次多项式,称之为拉格朗日插值基函数。 由于要求当x为x0时候,f(x) = y0, 所以最简单的做法就是让b0(x0) = 1, b1(x0) = b2(x0) = b3(x0) = 0; 同理可知,在x1,x2,x3点上,插值基函数的值构造如下:
b0(x) b1(x) b2(x) b3(x) x=x0 1 0 0 0 x=x1 0 1 0 0 x=x2 0 0 1 0 x=x3 0 0 0 1 问题1、根据这些值来确定b0(x)的表达式, 由于b0(x1) = b0(x2) = b0(x3) = 0,所以x1, x2, x3是b0(x)的零点,由于b0(x)是三次多项式,所以设 b0(x) = c0 * (x-x1) * (x-x2) * (x-x3) 由于b0(x0) = 1,所以1 = c0 * (x0-x1) * (x0-x2) * (x0-x3) 得到c0 = 1/[(x0-x1)(x0-x2)(x0-x3)] 所以:b0(x) = (x-x1)*(x-x2)*(x-x3)/[(x0-x1)*(x0-x2)*(x0-x3)] 同理可求b1(x)、b2(x),略 问题2、根据上面的表格说明插值基函数的一个性质:无论x取和值,它们的和都为1.【这
关于三次样条插值函数的学习报告(研究生)资料
学习报告—— 三次样条函数插值问题的讨论 班级:数学二班 学号:152111033 姓名:刘楠楠
样条函数: 由一些按照某种光滑条件分段拼接起来的多项式组成的函数;最常用的样条函数为三次样条函数,即由三次多项式组成,满足处处有二阶连续导数。 一、三次样条函数的定义: 对插值区间[,]a b 进行划分,设节点011n n a x x x x b -=<< <<=,若 函数2()[,]s x c a b ∈在每个小区间1[,]i i x x +上是三次多项式,则称其为三次样条函数。如果同时满足()()i i s x f x = (0,1,2)i n =,则称()s x 为()f x 在 [,]a b 上的三次样条函数。 二、三次样条函数的确定: 由定义可设:101212 1(),[,] (),[,]()(),[,] n n n s x x x x s x x x x s x s x x x x -∈??∈?=???∈?其中()k s x 为1[,]k k x x -上的三次 多项式,且满足11(),()k k k k k k s x y s x y --== (1,2,,k n = 由2()[,]s x C a b ∈可得:''''''()(),()(),k k k k s x s x s x s x -+-+== 有''1()(),k k k k s x s x -++= ''''1()(),(1 ,2,,1)k k k k s x s x k n -+ +==-, 已知每个()k s x 均为三次多项式,有四个待定系数,所以共有4n 个待定系数,需要4n 个方程才能求解。前面已经得到22(1)42n n n +-=-个方程,因此要唯一确定三次插值函数,还要附加2个条件,一般上,实际问题通常对样条函数在端点处的状态有要求,即所谓的边界条件。 1、第一类边界条件:给定函数在端点处的一阶导数,即 ''''00(),()n n s x f s x f == 2、第二类边界条件:给定函数在端点处的二阶导数,即
matlab_牛顿插值法_三次样条插值法
(){} 2 1 ()(11),5,10,20: 1252 1()1,(0,1,2,,)()2,(0,1,2,,)() ()2 35,20:1100 (i i i i n n k k k Newton f x x n x f x x i i n f x n x y i n Newton N x S x n x k y f x = -≤≤=+=-+====-+ = 题目:插值多项式和三次样条插值多项式。已知对作、计算函数在点处的值;、求插值数据点 的插值多项式和三次样条插值多项式;、对计算和相应的函数值),()() (1,2,,99)4:()max ()()max ()n k n k n k n k n k n k k k N x S x k E N y N x E S y S x ==-=- 和; 、计算,; 解释你所得到的结果。 算法组织: 本题在算法上需要解决的问题主要是:求出第二问中的Newton 插值多项式 )(x N n 和三次样条插值多项式()n S x 。如此,则第三、四问则迎刃而解。计算两 种插值多项式的算法如下: 一、求Newton 插值多项式)(x N n ,算法组织如下: Newton 插值多项式的表达式如下: )())(()()(110010--???--+???+-+=n n n x x x x x x c x x c c x N 其中每一项的系数c i 的表达式如下: 1102110) ,,,(),,,(),,,(x x x x x f x x x f x x x f c i i i i i -???-???= ???=- 根据i c 以上公式,计算的步骤如下: ?? ??? ?? ?????+??????? ???????????----) ,,,,(1) ,,,(),,,,(),(,),,(2)(,),(),(11101111011010n n n n n n n n x x x x f n x x x f x x x f n x x f x x f x f x f x f 、计算、计算、计算、计算 二、求三次样条插值多项式)(x S n ,算法组织如下:
基于MATLAB的SVPWM高次谐波分析
基于MATLAB的SVPWM高次谐波分析 彭润泽14721429 (上海大学机电工程与自动化学院,上海200072) 摘要:从空间矢量脉宽(SVPWM)调制产生的机理出发,推导了空间矢量电压的公式,简介了SVPWM的实现方式,指出了五段式和七段式两种主要逼近方法下。在MA TLAB/Simulink的软件环境下对两种合成方式搭建了仿真模型,分析了两种方式产生的SVPWM谱的谐波分布和相应逆变器产生电压的谐波分布情况,并总结出了两者的优缺点。得到了七段SVPWM的正弦度高和五段SVPWM开关损耗少的结论。 关键词:空间矢量调制技术;高次谐波分析;傅里叶变换;MA TLAB/Simulink Study on harmonics of SVPWM based on MATLAB Peng Runze (School of Engineering-Mechatronics and automation, Shanghai University, Shanghai 200072, China) Abstract: Starting off with the principle of space vector pulse width modulation(SVPWM), this paper deduces formulas of the voltage space and points out two main approximation methods. In software MATLAB / Simulink , simulation models are built to analyze the harmonics generated by the distribution of two ways SVPWM harmonic spectrum distribution and the corresponding voltage generated by the inverter. Finally, the paper sums up the advantages and disadvantages of two methods and hence draw conclusions that seven-step SVPWM possesses better sine waveform while five-step one reduces switching loss. Key words: SVPWM; Fourier transform; harmonic; MATLAB/Simulink 0 引言 在全数字高性能交流调速系统中,通常采用数字脉宽调制来代替传统的模拟脉宽调制。空间矢量脉宽调制(SVPWM)技术是近年来研究的一个热点。SVPWM是把三相变流器的端部电压状态在复平面上综合为空间电压矢量,并通过不同的开关状态形成八个空间矢量,利用这八个空间矢量来逼近电压圆,从而形成SVPWM波, 它能在较低的开关频率下获得较好的谐波抑制效果和比SPWM高出15%的基波电压[1-3],同时,SVPWM调制技术还有一个优点即易于实现数字和实时控制[4],其主电路如图1所示。空间矢量脉宽调制(SVPWM)因其与同步旋转坐标系控制量接口方便,直流电压利用率高、总谐波畸变小等特点被广泛应用于PWM 整流器当中[5-6]。电压型PWM逆变器把部分基波能量转换成谐波能量,造成交流输入电压、电流发生畸变,向系统中注入高次谐波,使输入功率因数降低,电能质量下降,对电力系统包括用户的安全、经济运行产生严重的危害和影响,甚至造成电力设备的损坏[7];]对于三相电机来说,高次谐波会造成转矩脉动,影响电机控制精度、提高控制难度,还会增加损耗,造成电机发热。所以研究空间矢量脉宽调制产生的高次谐波具有重要的意义。 图1 三相电压型逆变器原理图 Fig.1 schematic diagram of the inverter 1 SVPWM工作原理 空间矢量脉宽调制SVPWM(Space Vector Pulse Width Modulation),实际上是对应于交流感应电机或永磁同步电机中的三
三次样条插值自然边界条件
例:已知一组数据点,编写一程序求解三次样条插值函数满足 并针对下面一组具体实验数据 0.25 0.3 0.39 0.45 0.53 0.5000 0.5477 0.6245 0.6708 0.7280 求解,其中边界条件为. 1)三次样条插值自然边界条件源程序: function s=spline3(x,y,dy1,dyn) %x为节点,y为节点函数值,dy1,dyn分别为x=0.25,0.53处的二阶导 m=length(x);n=length(y); if m~=n error('x or y输入有误') return end h=zeros(1,n-1); h(n-1)=x(n)-x(n-1); for k=1:n-2 h(k)=x(k+1)-x(k); v(k)=h(k+1)/(h(k+1)+h(k)); u(k)=1-v(k); end g(1)=3*(y(2)-y(1))/h(1)-h(1)/2*dy1; g(n)=3*(y(n)-y(n-1))/h(n-1)+h(n-1)/2*dyn; for i=2:n-1 g(i)=3*(u(i-1)*(y(i+1)-y(i))/h(i)+v(i-1)*(y(i)-y(i-1))/h(i-1)); end for i=2:n-1; A(i,i-1)=v(i-1); A(i,i+1)=u(i-1); end A(n,n-1)=1; A(1,2)=1; A=A+2*eye(n); M=zhuigf(A,g); %调用函数,追赶法求M fprintf('三次样条(三对角)插值的函数表达式\n'); syms X;
for k=1:n-1 fprintf('S%d--%d:\n',k,k+1); s(k)=(h(k)+2*(X-x(k)))./h(k).^3.*(X-x(k+1)).^2.*y(k)... +(h(k)-2*(X-x(k+1)))./h(k).^3.*(X-x(k)).^2.*y(k+1)... +(X-x(k)).*(X-x(k+1)).^2./h(k).^2*M(k)+(X-x(k+1)).*... (X-x(k)).^2./h(k).^2*M(k+1); end s=s.'; s=vpa(s,4); %画三次样条插值函数图像 for i=1:n-1 X=x(i):0.01:x(i+1); st=(h(i)+2*(X-x(i)))./(h(i)^3).*(X-x(i+1)).^2.*y(i)... +(h(i)-2.*(X-x(i+1)))./(h(i)^3).*(X-x(i)).^2.*y(i+1)... +(X-x(i)).*(X-x(i+1)).^2./h(i)^2*M(i)+(X-x(i+1)).*... (X-x(i)).^2./h(i)^2*M(i+1); plot(x,y,'o',X,st); hold on End plot(x,y); grid on %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %调用的函数: %追赶法 function M=zhuigf(A,g) n=length(A); L=eye(n); U=zeros(n); for i=1:n-1 U(i,i+1)=A(i,i+1); end U(1,1)=A(1,1); for i=2:n L(i,i-1)=A(i,i-1)/U(i-1,i-1); U(i,i)=A(i,i)-L(i,i-1)*A(i-1,i); end Y(1)=g(1); for i=2:n Y(i)=g(i)-L(i,i-1)*Y(i-1); end M(n)=Y(n)/U(n,n); for i=n-1:-1:1 M(i)=(Y(i)-A(i,i+1)*M(i+1))/U(i,i);
一种软件测量相位差方法研究
一种软件测量相位差方法研究 作者:杨明1姜万东1宋国云2 (1.珠海万力达电气股份有限公司,广东珠海 519085; 2.酒泉超高压输变电公司,甘肃酒泉 735000) 摘要:传统测相位的办法是通过定时采样信息,经过快速傅立叶变换进行分析,这种做法要求采样点是整个周期的信息,还要进行复杂的作商、求反正切计算,运算量大,对系统时间造成一些浪费。作者根据传统测量方法进行拓展,提出了一种新颖的相位差测量方法,计算量小,用时少,精度高,特别适用于单片机环境下的软件测相位使用。 关键词:相位差;快速傅立叶变换(FFT);单片机;软件测相位 相位差测量是工频交流电气测量技术的一个很重要的部分,电力系统中研究相位差是实现系统并列、准同期、无扰动合闸等工艺的重要前提条件,对系统稳定运行具有重要的意义。 传统的软件测相位的办法是通过定时采样一个周波的信息,利用快速傅立叶变换(FFT),将两个电气测量量的实部、虚部求出,然后对虚部差、实部差之商经过一次反正切计算,得出相位差。该方法运算量大,对系统资源浪费严重,对一些时间性要求比较苛刻的场合应用有局限性。为解决这一矛盾,本文利用考核过零点的时间差,求的相位差,研究数字滤波器,对提高测量精度有重要的意义。 1 信号采样 电气测量一般为50Hz的正弦波,为了满足测量精度、获得充裕的系统应用时间,本方 15电角度。通过单片机的定时中断,法使用的是每周24点的采样密度,既每个采样间隔是 读取中断时刻AD中各路模拟量的数值,分别储存至相应的寄存器数组中,如通道A、B的寄存器分别为AD_BUF_A[order]、AD_BUF_B[order],其中order表示采样点次序,通道A、B采样点次序严格一致。 相位测量对所测的电气量的谐波要求比较严格,所以采样电路的前级的滤波措施要得当,专门的带通滤波器电路,可以很好地解决谐波问题,但是由于滤波回路会产生一些相角偏移,所以滤波器件的选型要严格。为了使测量误差尽可能的降低,为此,软件的滤波措施也要考虑。 2采样数据处理 以通道A为基本相位,研究通道A与通道B过零点的时间差,进而求解两者之间的相位
基于matlab的电力系统谐波抑制仿真研究--任务书
毕业设计(论文)课题任务书 (2013----2014学年) 学院名称:科技学院 课题名称基于matlab的电力系统谐波分析 学生姓名专业电气工程及自动化学号 指导教师任务书下达时间2013年12月16 日 课题概述: 通过本次毕业设计,使学生对电力系统谐波抑制的问题有比较全面的了解。并且学习电力系统谐波对电力系统电能质量方面及继电保护方面的影响,重点研究电力系统谐波的产生机理并利用MATLAB编程进行仿真,得到滤波后较好的电能质量结果。 要求阅读或检索的参考资料及文献(包括指定给学生阅读的外文资料): 1 唐统一,吴震春,孙树勤.电力系统谐波[M].徐州:中国矿业大学出版社,1991. 2 曲学基,曲敬铠,于明扬等.电力电子滤波技术及其应用[M].北京:电子工业出版社,2008. 3 浅析配电网谐波的危害与治理[J].科苑观查,32. 4 George J.Wakileh,徐政(译).电力系统谐波——基本原理、分析方法和滤波器设计[M].机械工 业出版社,2007. 5 陈志业,尹华丽.电能质量及其治理新技术[J].电网技术,2002, 26(7):67-70. 6、电能质量公用电网谐波,GB/T14549-93,中国电力出版社. 7、翁利民,张启春,舒立平等.配电网高次谐波抑制方法的分析[J].电力自动化设备,2000, 20(3):22-25. 8、Luo Weiping. The Harmonious Detecting and Analyzing of PV Grid Connected Generation. Proceedings of the 27th Chinese Control Conference July 16-18, 2008, Kunming,Yunnan, China. 9、翁利民.电力电子技术与谐波抑制,无功补偿技术研究综述[J].电力电容器,2004,3:6-10. 10、李承,皱云屏. 有源电力滤波器抑制谐波的机理分析[J].电力系统自动化,2003,27(20):31-34. 11、李圣清,朱英浩,周有庆等.电网谐波检测方法的综述[J].高电压技术,2004,30(3):39-42. 12、王兆安,黄俊.电力电子技术(第4版)EM3.机械工业出版社,2005.07. 13、刘桂英,粟时平. 并联有源电力滤波器滞环电流比较控制研究[J]. 高电压技术, 2005, 3l(5): 58-60. 14、赵金宝,非线性电力负荷的谐波与抑制技术的研究.广西大学硕士学位论文,2006. 15、王兆安,杨君等.谐波抑制和无功功率补偿(第二版)[M].机械工业出版社,2006.01.
对拉格朗日插值法与牛顿插值法的学习和比较
对拉格朗日插值法与牛顿插值法的学习和比较 摘要:根据对拉格朗日插值法和牛顿插值法的理解,本文主要介绍了拉格朗日插值法和牛顿插值法的相关内容以及它们的区别。 关键词:拉格朗日插值法;牛顿插值法 The leaning and comparison of the Lagrange interpolation and Newton interpolation Abstract: Based on the understanding of the Lagrange interpolation and Newton interpolation ,this paper mainly describes some related knowledge as well as the difference between these two methods. Keywords: Lagrange interpolation ; Newton interpolation 前言 在工程和科学研究中出现的函数是多种多样的。常常会遇到这样的情况:在某个实际问题中,虽然可以断定所考虑的函数)(x f 在区间],[b a 上存在且连续,但却难以找到它的解析表达式,只能通过实验和观测得到在有限个点上的函数值(即一张函数表)。显然,要利用这张函数表来分析函数)(x f 的性态,甚至直接求出其他一些点上的函数值可能是非常困难的。面对这些情况,总希望根据所得函数表(或结构复杂的解析表达式),构造某个简单函数)(x P 作为)(x f 的近似。这样就有了插值法,插值法是解决此类问题目前常用的方法。 如设函数)(x f y =在区间],[b a 上连续,且在1+n 个不同的点b x x x a n ≤≤,,,10 上分别取值n y y y ,,,10 。 插值的目的就是要在一个性质优良、便于计算的函数类Φ中,求一简单函数)(x P ,使 ),,1,0()(n i y x P i i == 而在其他点i x x ≠上,作为)(x f 的近似。 通常,称区间],[b a 为插值区间,称点n x x x ,,,10 为插值节点,称式i i y x P =)(为插值条件,称函数类Φ为插值函数类,称)(x P 为函数)(x f 在节点n x x x ,,,10 处的插值函数。求插值函数)(x P 的方法称为插值法。 插值函数类Φ的取法不同,所求得的插值函数)(x P 逼近)(x f 的效果就不同。它的选择取决于使用上的需要,常用的有代数多项式、三角多项式和有理函数等。当选用代数多项式作为插值函数时,相应的插值问题就称为多项式插值。本文讨论的拉格朗日插值法与牛顿插值法就是这类插值问题。 在多项式插值中,最常见、最基本的问题是:求一次数不超过n 的代数多项式 n n x a x a a x P +++= 10)( 使),,1,0()(n i y x P i i n ==,其中,n a a a ,,,10 为实数。