超声波原理图
超声波发生器电源控制电路
超声波发生器电源控制电路信息发布时间:(2008年8月7日22:02:40 ) 发布者IP地址: 信息详细内容: 第60324篇:基于PWM大功率超声波电源的设计发布时间:2006年12月30日点击次数:120 来源:电子设计应用作者:内蒙古科技大学机械工程学院苏凤岐汪建新孙建平摘要:本文详细介绍了为驱动磁滞伸缩换能器而设计的一种频率、功率可调式大功率超声波电源,该电源采用由IGBT构成的全桥式逆变主电路,实现了逆变降压和输出电压调控。控制电路以脉宽调制电路为核心,通过给定信号和反馈信号电压的比较,获得宽度可变的脉冲信号,调节电源的输出电压,并实现对电源的闭环控制。关键词:IGBT;波形发生器;超声换能器;脉宽调制引言近年来,随着全控制型电子器件和PWM技术的迅速发展,功率超声的应用及其驱动电源的开发已成为热点研究领域之一。本文介绍的高频换能器驱动电源,采用全桥移相式串联电路拓扑,以单片脉宽调制电路为核心、IGBT功率管为功率开关器件,实现了大功率输出。它具有效率高、性能稳定、体积小、质量轻和调节方便等优点。超声波电源的设计超声波电源的组成及原理框图逆变式超声波电源主要由主电路和控制电路两部分组成,其基本原理框图如图1所示。图1超声波发生器原理框图主电路是将电能从电网传递给负载的电路,其主要作用是减小变压器体积和改善电源的动态品质。控制电路则主要为逆变主电路提供开关脉冲信号,驱动逆变主电路工作,并借助反馈电路和给定电路来实现对逆变器的闭环控制。逆变主电路逆变主电路包括输入整流滤波、逆变器和输出滤波三个主要部分,而逆变器则是其核心部件。逆变器本设计采用的逆变电路为全桥式逆变电路,其优点是:适用于大功率输出,主变压器只需一个原边绕组,通过正、反向的电压得到正、反向的磁通。因此,变压器铁芯和绕组得到最佳利用,使效率得到提高。另外,功率开关管在正常运行情况下,最大的反向电压不会超过电源电压,4个能量恢复二极管能消除一部分由漏感产生的瞬时电压,无须设置能量恢复绕组,反激能量 便得到恢复利用。在全桥式逆变电路中,采用IGBT作为大功率开关器件。IGBT管构成的逆变器的电路原理图如图2所示。图2桥式变换电路图交流电经桥式整流器而获得直流电压,并经C0滤波,变成平滑的直流电压V+。该电压加在IGBT功率管Tr1、Tr2、Tr3、Tr4组成的逆变桥上。当Tr1、Tr2、Tr3、Tr4都截止时,中频变压器T 原边线圈绕组T1p两端的电压U1=0。给Tr1、Tr3触发脉冲,这两个功率管导通, Tr2、Tr4截止时, 此时中频变压器T原边线圈绕组T1p两端的电压U1=V+,流经变压器原边线圈绕组T1p的电流方向由下至上。当Tr1、Tr3截止, Tr2、Tr4导通时, 此时中频变压器T原边线圈绕组T1p两端的电压U1=-V+,变压器原边线圈绕组T1p电流的方向为由上至下。由此可见,通过Tr1、Tr3和Tr2、Tr4的交替导通和关断,也就是交替驱动Tr1、Tr3和Tr2、Tr4, 中频变压器T的二次侧即得到矩形波交流输出,实现了直流变交流的过程。T r1, Tr2、Tr3, Tr4的通断受控于电子控制电路,其每秒钟驱动IGBT的次数决定了电源的工作频率。中频变压器在逆变器部分, 中频变压器的作用是实现电压变换,功率传递以及输入、输出之间的隔离。由于中频变压器的工作频率较高,随着频率的增大,铁芯的铁损将成倍增加。为了减少其铁损需选用厚度极薄的硅钢片,这显然是很不经济的,因而选用高导磁合金材料的铁氧体磁芯。铁氧体磁芯的规格可根据输出功率及其效率来确定,则磁芯有效截面积Ae、总磁感应强度增量△B也就确定。根据公式1,可计算出中频变压器的原边绕组匝数。 (1) 其中,Np为变压器原边绕组匝数,U1为变压器绕组电压,△B为总磁感应强度增量,Ton为最大导通时间。控制电路控制电路主要由电子控制电路和驱动电路构成,而电子控制电路又包括时序控制电路和脉宽调制电路。其中,脉宽调制电路是整个超声电源控制系统的核心,它与控制系统中的其它电路都有直接联系,其主要作用是将电压给定信号和电压 反馈信号进行比较放大,根据给定值与反馈值的差值,输出相应宽度的脉冲信号,以调整电源输出电压的大小。通常采用定频率调脉宽的PWM方式来达到换能器所需的各种特性控制。脉宽调制电路还有欠压、过压、过流等保护功能,封锁输出脉冲,使电源停止输出。另外,脉宽调制电路还具有软启动、死区设定等功能。脉宽调制电路本设计采用SG3525A作为电源的PWM芯片。该芯片使用简单,只需要外接少量电阻电容,即可构成所需的脉宽调制电路。如图3所示,芯片内部主要由误差放大器N1、比较器N2、振荡器、分相器和触发器等组成。图3 脉宽调制电路图给定电压Ug和反馈电压Uf分别接至误差放大器N1的同相端和反相端,N1 端的输出电压UN1接至比较器N2的反相输入端,同时,振荡器产生的三角波信号UN2,接至N2的同相输入端。误差放大器的输出与锯齿波电压在比较器中进行比较,从而在比较器的输出端输出一个随误差放大器输出电压的高低而改变脉宽的方波脉冲。再将此方波脉冲送或非门的一个输入端,或非门另三个输入端分别为触发器、振荡锯齿波、欠压
超声波模块程序详解
int Trigpin = 7; //定义模块触发引脚 int Echopin = 5; //定义模块接收引脚 float Distance; //定义距离变量 void setup() { pinMode(Echopin,INPUT) ; pinMode(Trigpin,OUTPUT); Serial.begin(9600);//启动串口功能 } void loop() { Distance = Measurement();//调用测量函数,将采得的值给变量Distance Serial.print(Distance);//在端口输出距离 Serial.println("cm");//输出单位,并换行 delay(2000); } float Measurement() { float distance;//定义一个局部变量 digitalWrite(Trigpin,LOW); //初始化触发引脚 delayMicroseconds(2); digitalWrite(Trigpin,HIGH);//给触发引脚一个信号,使模块发出声波 delayMicroseconds(10); digitalWrite(Trigpin,LOW);//结束声波信号 distance = (pulseIn(Echopin,HIGH)*17)/1000;//计算距离 return distance;//将算得的距离返回给变量distance }
伺服舵机+超声波模块 #include
超声波焊接原理及材料对其的影响
★超声波焊接是热塑性塑料在超声波振动作用下,由于表面分子间摩擦生热而使两块塑料熔接在一起的焊接方法。 超声波金属焊接: 1、超声波金属焊接 超声波金属焊接的优点在于快速、节能、熔合强度高、导电性好、无火花、接近冷态加工;缺点是所焊接金属件不能太厚(一般小于或等于5mm)、焊点位不能太大、需要加压。超声波金属焊接是一种机械处理过程,在焊接过程中,并无电流在被焊件中流过,也无诸如电焊模式的焊弧产生,由于超声焊接不存在热传导与电阻率等问题,因此对于有色金属材料来说,无疑是一种理想的金属焊接设备系统,对于不同厚度的片材,能有效地进行焊接。 超声波焊接原理: 超声波塑料焊接机超声波塑料焊接原理 当超声波作用于热塑性的塑料接触面时,会产生每秒几万次的高频振动,这种达到一定振幅的高频振动,通过上焊件把超声能量传送到焊区,由于焊区即两个焊接的交界面处声阻大,因此会产生局部高温。又由于塑料导热性差,一时还不能及时散发,聚集在焊区,致使两个塑料的接触面迅速熔化,加上一定压力后,使其融合成一体。当超声波停止作用后,让压力持续几秒钟,使其凝固成型,这样就形成一个坚固的分子链,达到焊接的目的,焊接强度能接近于原材料强度。超声波塑料焊接的好坏取决于换能器焊头的振幅,所加压力及焊接时间等三个因素,焊接时间和焊头压力是可以调节的,振幅由换能器和变幅杆决定。这三个量相互作用有个适宜值,能量超过适宜值时,塑料的熔解量就大,焊接物易变形;若能量小,则不易焊牢,所加的压力也不能太大。这个最佳压力是焊接部分的边长与边缘每1mm的最佳压力之积 原理分析图
超声波焊接优点: 1、超声波塑料焊接优点:焊接速度快,焊接强度高、密封性好;取代传统的焊接/粘接工艺,成本低廉,清洁无污染且不会损伤工件;焊接过程稳定,所有焊接参数均可通过软件系统进行跟踪监控,一旦发现故障很容易进行排除和维护。 2、超声波金属焊接优点:1)、焊接材料不熔融,不脆弱金属特性。2)、焊接后导电性好,电阻系数极低或近乎零。3)、对焊接金属表面要求低,氧化或电镀均可焊接。4)、焊接时间短,不需任何助焊剂、气体、焊料。5)、焊接无火花,环保安全。 超声波金属焊接适用产品: 1)、镍氢电池镍氢电池镍网与镍片互熔与镍片互熔。2)、锂电池、聚合物电池铜箔与镍片互熔,铝箔与铝片互熔。3)、电线互熔,偏结成一条与多条互熔。4)、电线与名种电子元件、接点、连接器互熔。5)、名种家电用品、汽车用品的大型散热座、热交换鳍片、蜂巢心的互熔。6)、电磁开关、无熔丝开关等大电流接点,异种金属片的互熔。7)、金属管的封尾、切断可水、气密。 超音波的熔焊应用方法: 一、熔接法:以超音波超高频率振动的焊头在适度压力下,使二块塑胶的接合面产生摩擦热而瞬间熔融接合,焊接强度可与本体媲美,采用合适的工件和合理的接口设计,可达到水密及气密,并免除采用辅助品所带来的不便,实现高效清洁的熔接。二、铆焊法:将超音波超高频率振动的焊头,压着塑胶品突出的梢头,使其瞬间发热融成为铆钉形状,使不同材质的材料机械铆合在一起。三、埋植:藉着焊头之传道及适当之压力,瞬间将金属零件(如螺母、螺杆等)挤入预留入塑胶孔内,固定在一定深度,完成后无论拉力、扭力均可媲美传统模具内成型之强度,可免除射出模受损及射出缓慢之缺点。四、成型:本方法与铆焊法类似,将凹状的焊头压着于塑胶品外圈,焊头发出超音波超高频振动后将塑胶溶融成形而包覆于金属物件使其固定,且外观光滑美观、此方法多使用在电子类、喇叭之固定成形,及化妆品类之镜片固定等。五、点焊:A、将二片塑胶分点熔接无需预先设计焊线,达到熔接目的。B、对比较大型工件,不易设计焊线的工件进行分点焊接,而达到熔接效果,可同时点焊多点。六、切割封口:运用超音波瞬间发振工作原理,对化纤织物进行切割,其优点切口光洁不开裂、不拉丝。超声波金属焊接机2、超声波金属焊接原理是利用超声频率(超过16KHz )的机械振动能量,连接同种金属或异种金属的一种特殊方法.金属在进行超声波焊接时,既不向工件输送电流,也不向工件施以高温热源,只是在静压力之下,将框框振动能量转变为工作间的摩擦功、形变能及有限的温升.接头间的冶金结合是母材不发生熔化的情况下实现的一种固态焊接.因此它有效地克服了电阻焊接时所产生的飞溅和氧化等现象.超
超声波收发电路大全
40kHZ超声波发射电路(1) 40kHZ超声波发射电路之一,由F1~F3三门振荡器在F3的输出为40kHZ方波,工作频率主要由C1、R1和RP决定,用RP可调电阻来调节频率。F3的输出激励换能器T40-16的一端和反向器F4,F4输出激励换能器T40-16的另一端,因此,加入F4使激励电压提高了一倍。电容C3、C2平衡F3和F4的输出,使波形稳定。电路中反向器F1~F4用CC4069六反向器中的四个反向器,剩余两个不用(输入端应接地)。电源用9V叠层电池。测量F3输出频率应为40kHZ±2kHZ,否则应调节RP。发射超声波信号大于8m。 40kHZ超声波发射电路(2) 40kHZ超声波发射电路之二,电路中晶体管VT1、VT2组成强反馈稳频振荡器,振荡频率等于超声波换能器T40-16的共振频率。T40-16是反馈耦合元件,对于电路来说又是输出换能器。T40-16两端的振荡波形近似于方波,电压振幅接近电源电压。S是电源开关,按一下S,便能驱动T40-16发射出一串40kHZ超声波信号。电路工作电压9V,工作电流约25mA。发射超声波信号大于8m。电路不需调试即可工作。 40kHZ超声波发射电路(3)
40kHZ超声波发射电路之三,由VT1、VT2组成正反馈回授振荡器。电路的振荡频率决定于反馈元件的T40-16,其谐振频率为 40kHZ±2kHZ。频率稳定性好,不需作任何调整,并由T40-16作为换能器发出40kHZ的超声波信号。电感L1与电容C2调谐在40kHZ 起作谐振作用。本电路适应电压较宽(3~12V),且频率不变。电感采用固定式,电感量5.1mH。整机工作电流约25mA。发射超声波信号大于8m。 40kHZ超声波发射电路(4) 40kHZ超声波发射电路之四,它主要由四与非门电路CC4011完成振荡及驱动功能,通过超声换能器T40-16辐射出超声波去控制接收机。其中门YF1与门YF2组成可控振荡器,当S按下时,振荡器起振,调整RP改变振荡频率,应为40kHZ。振荡信号分别控制由YF4、YF3组成的差相驱动器工作,当YF3输出高电平时,YF4一定输出低电平;YF3输出低电平时,YF4输出高电平。此电平控制T40-16换能器发出40kHZ超声波。电路中YF1~YF4采用高速CMOS电路74HC00四与非门电路,该电路特点是输出驱动电流大(大于15mA),效率高等。电路工作电压9V,工作电流大于35mA,发射超声波信号大于10m。 40kHZ超声波发射电路(5)
基于51单片机的超声波测距系统
基于51单片机的超声波测距系统 贾源 完成日期:2011年2月22日
目录 一、设计任务和性能指标 (3) 1.1设计任务 (3) 1.2性能指标 (3) 二、超声波测距原理概述 (4) 2.1超声波传感器 (5) 2.1.1超声波发生器 (5) 2.1.2压电式超声波发生器原理 (5) 2.1.3单片机超声波测距系统构成 (5) 三、设计方案 (6) 3.1AT89C2051单片机 (7) 3.2超声波测距系统构成 (8) 3.2.1超声波测距单片机系统 (9) 图3-1:超声波测距单片机系统 (9) 3.2.2超声波发射、接收电路 (9) 图3-1:超声波测距发送接收单元 (10) 3.2.3显示电路 (10) 四.系统软件设计 (11) 4.1主程序设计 (11) 4.2超声波测距子程序 (12) 4.3超声波测距程序流程图 (13) 4.4超声波测距程子序流程图 (14) 五.调试及性能分析 (14) 5.1调试步骤 (14) 5.2性能分析 (15) 六.心得体会 (15) 参考文献 (16) 附录一超声波测系统原理图 (18) 附录二超声波测系统原理图安装图 (19) 附录三超声波测系统原理图PCB图 (20) 附录四超声波测系统原理图C语言原程序 (21) 参考文献 (26)
一、设计任务和性能指标 1.1设计任务 利用单片机及外围接口电路(键盘接口和显示接口电路)设计制作一个超声波测距仪器,用LED数码管把测距仪距测出的距离显示出来。 要求用Protel 画出系统的电路原理图,印刷电路板,绘出程序流程图,并给出程序清单。 1.2性能指标 距离显示:用三位LED数码管进行显示(单位是CM)。 测距范围:25CM到 250CM之间。误差:1%。
超声波测距电路图
超声波测距电路图 超声波测距电路原理和制作 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。 二、超声波测距原理 1、超声波发生器 为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振 来工作的。超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 3、超声波测距原理 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 图1 超声波传感器结构 这就是所谓的时间差测距法。 < 三、超声波测距系统的电路设计 图2 超声波测距电路原理图
超声波发射电路设计
中北大学 课程设计说明书 学生姓名:杨胜华学号:0805014137 学院:信息与通信工程学院 专业:电子信息科学与技术 题目:超声波发射电路设计 指导教师:程耀瑜职称: 教授 李文强职称:讲师 2011 年 1 月 7 日 中北大学
课程设计任务书 2010/2011学年第一学期 学院:信息与通信工程学院 专业:电子信息科学与技术 学生姓名:杨胜华学号:0805014137 课程设计题目:超声波发射电路设计 起迄日期:12月26日~1月7日 课程设计地点:中北大学 指导教师:程耀瑜,李文强 系主任:程耀瑜 下达任务书日期: 2010 年 12 月 26 日 课程设计任务书
课程设计任务书
目录
一.绪论----------------------------------------------------------------1页 1.1课程设计的目的及意义-------------------------------------1页 1.2 超声波发射电路的设计思路------------------------------3页 1.3 课程设计的任务及要求------------------------------------ 3页二.课程的方案设计与选取---------------------------------------- 4页 2.1 课程的方案设计--------------------------------------------- 4页 2.2 课程的方案选取--------------------------------------------- 6页三.系统的硬件结构------------------------------------------------- 6页 3.1 触发脉冲产生电路------------------------------------------ 7页 3.2发射脉冲产生电路------------------------------------------- 8页 3.3 换能器部分--------------------------------------------------- 9页四.Protel 99 SE 简介及原理图绘制 4.1Protel 99 SE 相关介绍及原理图绘制--------------------11页五.总结----------------------------------------------------------------12页六.参考文献----------------------------------------------------------14页附录一:超声波发射电路仿真-------------------------------------15页附录二:超声波发射电路原理图----------------------------------17页 绪论
超声波焊接原理【深度解析】
超声波焊接原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 超声波焊接是利用高频振动波传递到两个需焊接的物体表面,在加压的情况下,使两个物体表面相互摩擦而形成分子层之间的熔合。 超声波焊接是通过超声波发生器将50/60赫兹电流转换成15、20、30或40 KHz 电能。被转换的高频电能通过换能器再次被转换成为同等频率的机械运动,随后机械运动通过一套可以改变振幅的变幅杆装置传递到焊头。焊头将接收到的振动能量传递到待焊接工件的接合部,在该区域,振动能量被通过摩擦方式转换成热能,将塑料熔化。超声波不仅可以被用来焊接硬热塑性塑料,还可以加工织物和薄膜。一套超声波焊接系统的主要组件包括超声波发生器,换能器变幅杆/焊头三联组,模具和机架。线性振动摩擦焊接利用在两个待焊工件接触面所产生的摩擦热能来使塑料熔化。热能来自一定压力下,一个工件在另一个表面以一定的位移或振幅往复的移动。一旦达到预期的焊接程度,振动就会停止,同时仍旧会有一定的压力施加于两个工件上,使刚刚焊接好的部分冷却、固化,从而形成紧密地结合。轨道式振动摩擦焊接是一种利用摩擦热能焊接的方法。在进行轨道式振动摩擦焊接时,上部的工件以固定的速度进行轨道运动——向各个方向的圆周运动。运动可以产生热能,使两个塑料件的焊接部分达到熔点。一旦塑料开始熔化,运动就停止,两个工件的焊接部分将凝固并牢牢的连接在一起。小的夹持力会导致工件产生最小程度的变形,直径在10英寸以内的工件可以用应用轨道式振动摩擦进行焊接。 焊接原理 超声波焊接原理:超声波作用于热塑性的塑料接触面时,会产生每秒几万次的高频振动,这种达到一定振幅的高频振动,通过上焊件把超声能量传送到焊区,由于焊区即两个焊接的交界面处声阻大,因此会产生局部高温。又由于塑料导热性差,一时还不能及时散发,聚集在焊区,致使两个塑料的接触面迅速熔化,加上一定压力后,使其融合成一体。当超声波停止作用后,让压力持续几秒钟,
超声波焊接机的工作原理
超声波焊接机的工作原理 超音波焊接机的工作原理是: 是通过振荡电路振荡出高频信号由换能器转化成机械能(即频率超出人耳听觉阈的高频机械振动能),该能量通过焊头传导到塑料工件上,以每秒上几十万次的振动加上压力使塑料工件的接合面剧烈摩擦后熔化。振动停止后维持在工件上的短暂压力使两焊件以分子链接方式凝固为一体。一般焊接时间小于1秒钟,所得到的焊接强度可与本体相媲美。超声波塑料焊接机可用于热塑性塑料的对焊,也用于铆焊、点焊、嵌入、切除等加工工艺。根据产品的外观来设计模具的大小、形状。 超声波塑料焊接机由气压传动系统、控制系统、超声波发生器、换能器及工具头和机械装置等组成。 1、气动传动系统 包括有:过滹器、减压阀、油雾器、换向器、节流阀、气缸等。 工作时首先由空压机驱动冲程气缸,以带动超声换能器振动系统上下移动,动力气压在中小功率的超声波焊接中气压根据焊接需要调定。 2、控制系统 控制系统由时间继电器或集成电路时间定时器组成。主要功能是:一是控制气压传动系统工作,使其焊接时在定时控制下打开气路阀门,气缸加压使焊头下降,以一定压力压住被焊物件,当焊接完后保压一段时间,然后控制系统将气路阀门换向,使焊头回升复位;二是控制超声波发生器工作时间,本系统使整个焊接过程实现自动化,操作时只启动按钮产生一个触发脉冲,便能自动地完在本次焊接全过程。整个控制系统的顺序是:电源启动一触发控制信号气压传动系统,气缸加压焊头下降并压住焊触发超声发生器工作,发射超声并保持一定焊接时间去除超声发射继续保持一定压力时间退压,焊头回升焊接结束。 3、超声波发生器 (1)功率较大的超声波塑料焊接机,发生器信号采用锁相式频率自动跟踪电路,使发生器输出的频率基本上与换能器谐振频率一致。
超声波发射和接收电路
超声波发射和接收电路 在本设计中,我们设计的发射和接收电路都是分别只有一个,通过继电器进行顺、逆流方向收发电路的切换,这样做既降低了成本,又消除了非对称性电路误差,且发射脉冲通过使用单独的继电器分别对发射和接收换能器进行控制,使换能器的发射和接收电路完全隔离,消除了发射信号对接收的影响。 4.2.1超声波发射电路 接收信号的大小和好坏直接取决于发射传感器的发射信号,由于使用收发共用型超声换能器,所以除了选用性能优良的超声波传感器外,发射电路和前级信号接收电路至关重要,它决定着整个系统的灵敏度和精度。 超声波测量最常用的换能器发射电路大体可分为三种类型:窄脉冲触发的宽带激励电路、调制脉冲谐振电路和单脉冲发射电路。从早先国内进口的日本超声波流量计来看,基本都采用的是窄脉冲驱动电路。这种电路在设计上一般是用一个极快速的电子开关通过对储能元件的放电来实现,这些开关器件通常为晶闸管或大功率场效应管(MOSFET)。由于需要输出激励信号的瞬时功率大,因此开关器件必须由直流高压供电,一般要达到几十到一百伏以上,这在电池供电的系统中无法实现;此外,开关瞬间会产生高压脉冲,对整个电路的抗干扰设计不利。而脉冲谐振电路设计起来比较简单,其基本方法是用振荡电路产生一个高频振荡,经过幅值和功率放大后接至换能器,使换能器发出超声波,确保高频振荡的频率与换能器固有频率一致,则可获得超声发射的最佳效果。谐振电路能够使用较低的电压产生较强的超声波发射,适合使用电池供电的系统,而且它能精确地控制发射信号,效率高。 在本设计中,超声发射电路采用了连续脉冲发射电路,它由脉冲发生、放大电路构成,具体电路连接如图17所示。单片机发出的方波信号经三极管放大和变压器升压,达到足够功率后推动换能器超声超声波,这里变压器的主要用途是升高脉冲电压和使振荡器的输出阻抗与负载(超声换能器)阻抗匹配,变压器与探头接成单端激励方式。 图17超声波发射电路 4.3.2 超声波接收电路
超声波模块实验报告
超声波模块编程控制 实验报告 院、系机械与电气工程学院 专业班级机械125班第五组 姓名李泉军同组人赵凯,徐思琪,郭明开,韦耀辰
实验日期2014 年11 月21 日 一、实验原理 通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差就可以知道距离了。这与雷达测距原理相似。超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2) 二、超声波工作原理简介 (1) 采用IO口TRIG触发测距,给至少10us的高电平信号; (2)模块自动发送8个40khz的方波,自动检测是否有信号返回; (3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2; 本模块使用方法简单,一个控制口发一个10US以上的高电平,就可以在接收口等待高电平输出.一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.如此不断的周期测,即可以达到你移动测量的值
三、系统硬件电路图及实物照片 超声波测距电路图 显示距离10cm
四、系统软件程序流程图及程序清单
N Y Y Y N N Y Y 程序清单: //晶振9.6MHZ ,默认8分频,计时步距8/9.6=0.833333us #include
超声波焊接机基础学习知识原理
超声波焊接机原理 超声波塑胶焊接原理是由发生器产生20KHz(或15KHz)的高压、高频信号,通过换能系统,把信号转换为高频机械振动,加于塑料制品工件上,通过工件表面及在分子间的磨擦而使传递到接口的温度升高,当温度达到此工件本身的熔点时,使工件接口迅速熔化,继而填充于接口间的空隙,当震动停止,工件同时在一定的压力下冷却定形,便达成完美的焊接。 概述 超声波模治具架设不准确受力不平均原理 在一般认为超音波作业时,产品与模具表面只要接触准确就可以得到应该 会产生音波传导的现象. 我们如果单只观察硬件(模治具)的稳合程度,而忽略了整合型态的超音波作业方式,必定会产生舍本逐末或误判的后果,所以在此必须先强调超音波熔接的作业方式是传导音波,使成振动摩擦转为热能而熔接. 这时候超音波模治具的稳合程度、产品截面的高低、肉厚、深浅、材质的组织,必定无法是百分之百承受相同的压力。 另一方面上模(H o r n)输出的能量,每一点都有其误差值,并非整个面发出的能量都相同。就这整体而言,势必产生产品熔接线熔接程度的差异。所以也就必须作修正,如何修正,那就是靠超音波熔接机本身的水平螺丝,或是贴较薄的胶带或铝箔来克服了。
塑料产品材质配合不当 每一种塑料材质的熔点,各有不同,例如ABS塑料材质的熔点约115℃,耐隆约175℃、PC之145℃以上、PE约85℃为例:ABS与PE二种材质的熔点差距太大,超音波熔接势必困难。而ABS与PC二种材质,亦有差距,但已非前项差距如此之大,是以尚可熔接,但在超音波功率相同,能量扩大相同的情况下,相异的塑料材质,绝无法比相同材质的熔接效果好。 超声波台输出能量不足 客户在购买超音波熔接机时,通常较难预料未来产品发展的规格,所以会遇到较大产品对象超出超音波标准熔接的情形。此时在不增加成本的预算下,只得以现有设备来作业生一、超声波模治具架设不准确超声波、受力不平均怎么办? 在一般认为超音波作业时,产品与模具表面只要接触准确就可以得到应该的熔接效果,其实这只是表面的看法,超音波既然是摩擦振,就会产生音波传导的现象. 我们如果单只观察硬件(模治具)的稳合程度,而忽略了整合型态的超音波作业方式,必定会产生舍本逐末或误判的后果,所以在此必须先强调超音波熔接的作业方式是传导音波,使成振动摩擦转为热能而熔接. 这时候超音波模治具的稳合程度、产品截面的高低、肉厚、深浅、材质的组织,必定无法是百分之百承受相同的压力。 另一方面上模(H o r n)输出的能量,每一点都有其误差值,并非整个面发出的能量都相同。就这整体而言,势必产生产品熔接线熔接程度的差异。
超声波发生器的整体电路5
超声波发生器的整体电路基本由三部分组成,信号发生部分,功率放大部分,换能器和换能器的的匹配电路组成。信号发生电路可由RC 振荡电路、555 定时器构成的多谐波振荡器分别产生正弦波和矩形波两种,并且依据不同的原理可以实现变频。功率放大部分,由选定的功率放大器或模块实现功率放大,用来达到驱动功率放大器的功率。换能器是用来实现能量转化的,在两种电路中的用法和作用完全相同,都是在匹配电路的作用下实现能量转化的最大化。 5.1 变频RC 振荡整体电路的简述。 变频RC振荡整体电路由三部分部分组成,第一部分是变频RC振荡电路的发生部分,振变频RC振荡电路是用来产生一定频率和一定幅值正弦波的电路,它不需要外接输入信号,输出端就有信号输出。它的基本构思是在放大电路中人为地介入正反馈电路来产生稳定的振荡。根据选择电阻的不同来控制不同的频率,它的基本组成是RC振荡电路,运算放大器等组成 第二部分是功率放大部分。信号发生电路中输出的信号功率较小,不足以带动换能器工作,在逐级信号传递过程中,信号功率因太小,易失真和掺入杂波,加上功率放大电路,以满足小功率信号传递的需要。为输出足够大的功率,功率放大电路的输出电压、电流幅度都比较大。功率放大电路工作在大信号工作状态,从能量转换的观点来看,功率放大电路提供给负载的交流功率是在输入交流信号的控制下,将直流电源提供的能量转换成交流能量而来的。 第三部分为换能器和换能器的匹配电路,换能器是超声波发生器的核心器件,其特性参数决定整个设备的性能。超声波换能器就是通过换能器将高频电能转换为机械振动。换能器的特性取决与选材和制作工艺,匹配电路的作用是保证电信号能高效而安全地传输给换能器。 由三部分组成的变频RC 振荡整体电路如下
超声波测距电路图
超声波测距电路图超声波测距电路原理和制作 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。 二、超声波测距原理 1、超声波发生器 为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。 2、压电式超声波发生器原理
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 3、超声波测距原理 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 图1 超声波传感器结构 这就是所谓的时间差测距法。< 三、超声波测距系统的电路设计 图2 超声波测距电路原理图 本系统的特点是利用单片机控制超声波的发射和对超声波自发射至接收往返时间的计时,单片机选用8751,经济易用,且片内有4K的ROM,便于编程。电路原理图如图2所示。其中只画出前方测距电路的接线图,左侧和右侧测距电路与前方测距电路相同,故省略之。
超声波焊接机技术原理
超声波焊接机技术原理 超声波焊接机工作原理是:通过物体上下振动,使焊接件伸缩发热熔接。其机械原理是:把电能转化成机械能。当超声换能器产生的能量传送到焊区,由于焊区,即两个焊接的交界面处声阻大,因此会产生局部高温。由于塑料导热性差,热量聚集在焊区,使两个塑料的接触面迅速熔化,加上一定压力后,使其融合成一体。 一、超声波模治具架设不准确、受力不平均怎么办? 在一般认为超音波作业时,产品与模具表面只要接触准确就可以得到应该的超声波焊接机熔接效果,其实这只是表面的看法,超音波既然是摩擦振,就会产生音波传导的现象. 我们如果单只观察硬件(模治具)的稳合程度,而忽略了整合型态的超音波作业方式,必定会产生舍本逐末或误判的后果,所以在此必须先强调超音波熔接的作业方式是传导音波,使成振动摩擦转为热能而熔接. 这时候超音波模治具的稳合程度、产品截面的高低、肉厚、深浅、材质的组织,必定无法是百分之百承受相同的压力。 另一方面上模(H o r n)输出的能量,每一点都有其误差值,并非整个面发出的能量都相同。就这整体而言,势必产生产品熔接线熔接程度的差异。所以也就必须作修正,如何修正,那就是靠超音波熔接机本身的水平螺丝,或是贴较薄的胶带或铝箔来克服了。 二、塑料产品材质配合不当? 每一种塑料材质的熔点,各有不同,例如ABS塑料材质的熔点约115℃,耐隆约175℃、PC之145℃以上、PE约85℃为例:ABS与PE二种材质的熔点差距太大,超音波熔接势必困难。而ABS与PC二种材质,亦有差距,但已非前项差距如此之大,是以尚可熔接,但在超音波功率相同,能量扩大相同的情况下,相异的塑料材质,绝无法比相同材质的熔接效果好。 热熔塑胶分析图:
超声波传感器原理及应用
[日期:2007-06-05] 来源:作者:[字体:大中小] 超声波发射原理是把铁磁材料置于交变磁场中,产生机械振动,发射出超声波。 接收原理是当超声波作用在磁致材料上时,使磁滞材料磁场变化,使线圈产生感应电势输出。 超声波传感器原理与应用 2008-04-18 02:40 超声波传感器原理及应用 信息来源:转载https://www.360docs.net/doc/91170806.html,发布时间:2008-01-02字号:小中大 关键字:超声波传感器 1、遥控开关超声波遥控开关可控制家用电器及照明灯。采用 2、液位指示及控制器由于超声波在空气中有一定的衰减,则发送到液面及从液面反射回来的信号大小与液位有关,液面位置越高,信号越大;液面越低则信号就小。接收到的信号经BG1、BG2放大,经D1、D2整流成直流电压。当4.7KΩ上的电压超过BG3的导通电压时,有电流流过BG3,电流表有指示,电流大小与液面有关。A点与上图A点相连接。当液位低于设置值时,比较器输出为低电平。BG 不导通,若液位升到规定位置,比较器翻转,输出高电平。BG导通,J吸合,可通过电磁阀将输液开关关闭,以达到控制的目的(高位控制)。 超声波传感器 信息来源:https://www.360docs.net/doc/91170806.html,/ca.htm发布时间:2007-11-27字号:小中大 关键字:超声波传感器传感器压电陶瓷超声传感器超声波距离传感器 超声波传感器的测距系统设计图
信息来源:中国超声波发布时间:2008-03-17字号:小中大 关键字:超声波传感器 安全避障是移动机器人研究的一个基本问题。障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。本超声波测距系统选用了senscomp公司生产的polaroid6500系列超声波距离模块和600系列传感器,微处理器采用了atmel公司的at89c51。本文对此超声波测距系统进行了详细的分析与介绍。 1、超声波传感器及其测距原理 超声波是指频率高于20khz的机械波[1]。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应[1]的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。 超声波测距的原理一般采用渡越时间法tof(timeofflight)[2]。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离,即 1、硬件电路设计 我们设计的超声波测距系统由polaroid600系列传感器、polaroid6500系列超声波距离模块和at89c51单片机构成。
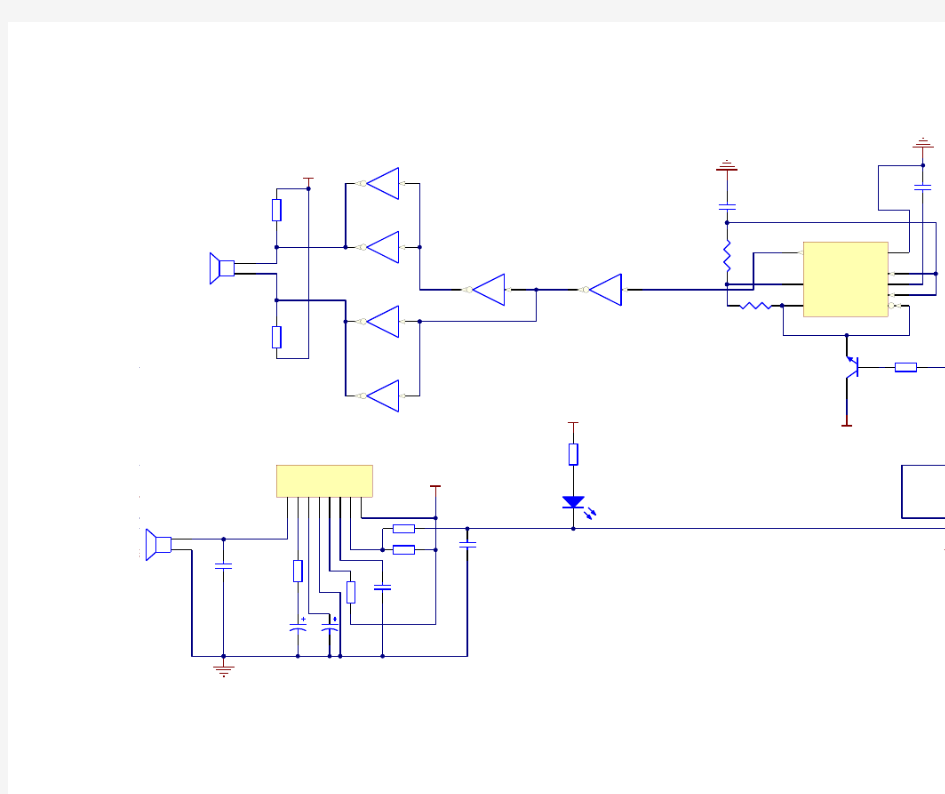
40kHZ超声波收发电路图及详解
40kHZ超声波收发电路 40kHZ超声波发射电路(1) 40kHZ超声波发射电路之一,由F1~F3三门振荡器在F3的输出为40kHZ方波,工作频率主要由C1、R1和RP决定,用RP可调电阻来调节频率。F3的输出激励换能器T40-16的一端和反向器F4,F4输出激励换能器T40-16的另一端,因此,加入F4使激励电压提高了一倍。电容C3、C2平衡F3和F4的输出,使波形稳定。电路中反向器F1~F4用CC4069六反向器中的四个反向器,剩余两个不用(输入端应接地)。电源用9V叠层电池。测量F3输出频率应为40kHZ±2kHZ,否则应调节RP。发射超声波信号大于8m。 40kHZ超声波发射电路(2) 40kHZ超声波发射电路之二,电路中晶体管VT1、VT2组成强反馈稳频振荡器,振荡频率等于超声波换能器T40-16的共振频率。T40-16是反馈耦合元件,对于电路来说又是输出换能器。T40-16两端的振荡波形近似于方波,电压振幅接近电源电压。S是电源开关,按一下S,便能驱动T40-16发射出一串40kHZ超声波信号。电路工作电压9V,工作电流约25mA。发射超声波信号大于8m。电路不需调试即可工作。 40kHZ超声波发射电路(3)
40kHZ超声波发射电路之三,由VT1、VT2组成正反馈回授振荡器。电路的振荡频率决定于反馈元件的T40-16,其谐振频率为40kHZ±2kHZ。频率稳定性好,不需作任何调整,并由T40-16作为换能器发出40kHZ的超声波信号。电感L1与电容C2调谐在40kHZ起作谐振作用。本电路适应电压较宽(3~12V),且频率不变。电感采用固定式,电感量5.1mH。整机工作电流约25mA。发射超声波信号大于8m。 40kHZ超声波发射电路(4) 40kHZ超声波发射电路之四,它主要由四与非门电路CC4011完成振荡及驱动功能,通过超声换能器T40-16辐射出超声波去控制接收机。其中门YF1与门YF2组成可控振荡器,当S按下时,振荡器起振,调整RP改变振荡频率,应为40kHZ。振荡信号分别控制由YF4、YF3组成的差相驱动器工作,当YF3输出高电平时,YF4一定输出低电平;YF3输出低电平时,YF4输出高电平。此电平控制T40-16换能器发出40kHZ超声波。电路中YF1~YF4采用高速CMOS电路74HC00四与非门电路,该电路特点是输出驱动电流大(大于15mA),效率高等。电路工作电压9V,工作电流大于35mA,发射超声波信号大于10m。 40kHZ超声波发射电路(5)