指纹芯片FPC10221035和芯启航CS2511P参数对比
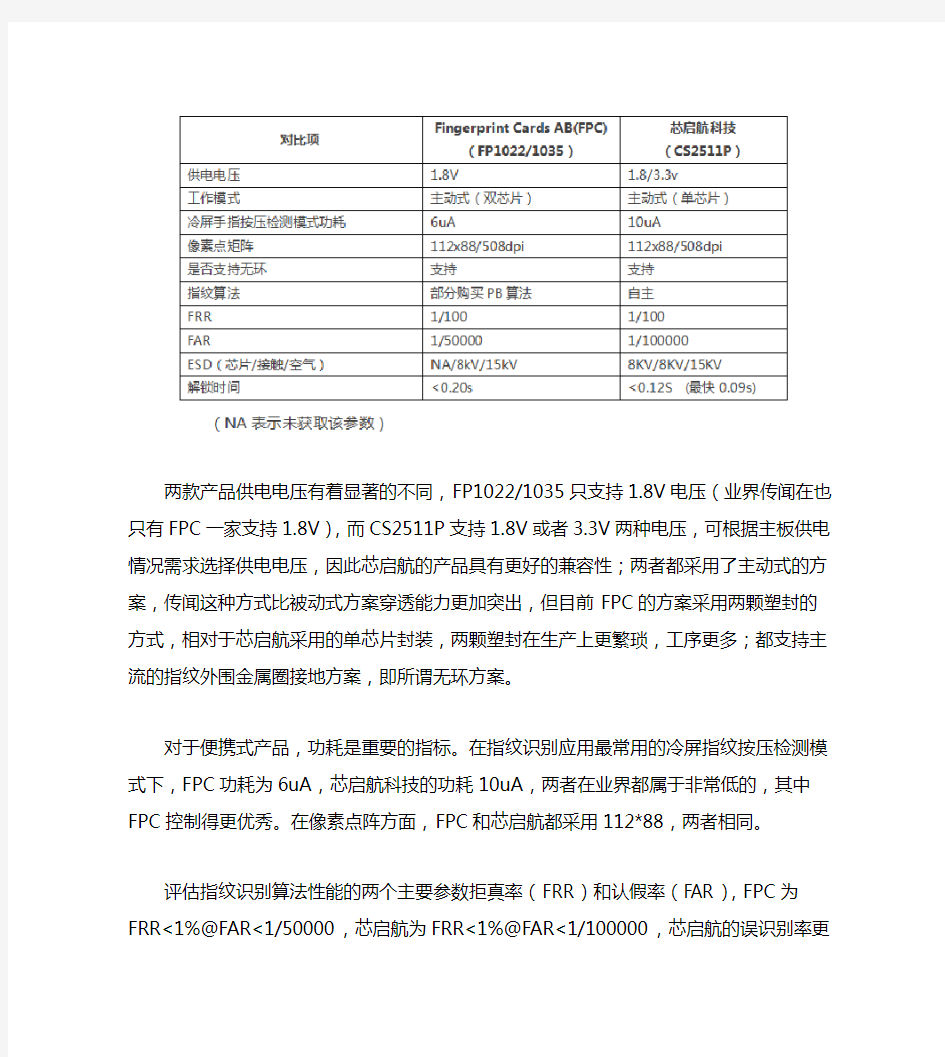
两款产品供电电压有着显著的不同,FP1022/1035只支持1.8V电压(业界传闻在也只有FPC一家支持1.8V),而CS2511P支持1.8V或者3.3V两种电压,可根据主板供电情况需求选择供电电压,因此芯启航的产品具有更好的兼容性;两者都采用了主动式的方案,传闻这种方式比被动式方案穿透能力更加突出,但目前FPC的方案采用两颗塑封的方式,相对于芯启航采用的单芯片封装,两颗塑封在生产上更繁琐,工序更多;都支持主流的指纹外围金属圈接地方案,即所谓无环方案。
对于便携式产品,功耗是重要的指标。在指纹识别应用最常用的冷屏指纹按压检测模式下,FPC功耗为6uA,芯启航科技的功耗10uA,两者在业界都属于非常低的,其中FPC控制得更优秀。在像素点阵方面,FPC和芯启航都采用112*88,两者相同。评估指纹识别算法性能的两个主要参数拒真率(FRR)和认假率(FAR),FPC为FRR<1%@FAR<1/50000,芯启航为FRR<1%@FAR<1/100000,芯启航的误识别率更低。值得一提的是,芯启航采用的是自己的算法,而传闻FPC购买了一部分PB的算法。
解锁时间也是指纹芯片综合性能的体现,FPC的解锁时间小于0.2s,快至眨眼功夫就可以指纹解锁,而芯启航的解锁速度更快,小于0.12s内就可解锁,最快甚至可达到0.09s。在产品的抗ESD能力上,芯启航为8KV/8KV/15KV,而FPC为
NA/8KV/15KV,有一项数据未提供;它们都能提供较为优异的防ESD静电能力,尤其芯启航的芯片pin脚可达8kV。
目前主流Intel主板芯片组介绍
买电脑,要能省则省,根据每个人的使用需求不同,就需要选购不同的电脑。这个时候,选择一款合适的主板就很重要,而主板上,主板芯片组就是一个很核心的部件,它影响着主板的性能,平台的定位和主板的性能一定要符合,才能够选择到极具性价比的电脑。这就是今天要说的问题,向大家介绍目前市面主流的Intel主板芯片组,希望大家能够从规格上了解到各款主板的区别,在选购主板的时候做到心中有底。 G31: 目前在Intel平台低端市场,G31芯片组主板可以说是独占鳌头,与它同为“3”系列整合主板的G33和G35芯片组主板都因各自的一些原因都非常少见,而nVIDIA出品的MCP73整合主板又因为不支持双通道等硬伤而性能短缺,现在市场上Intel低端平台,首选就是G31主板。 G31芯片组可以支持Intel LGA 775封装的系列处理器,并支持双通道DDR2内存,并可以支持800MHz的内存频率。在显示性能方面,G31芯片组整合了Intel GMA 3100显示核心,可以应付大多数的日常使用需求,并且支持Display Port、DVI等视频输出接口。南桥方面,G31芯片组搭配的是ICH7南桥芯片,ICH7南桥提供了4个SATA接口、6个USB接口以及4条PCI-E通道。虽然ICH7南桥提供的接口方面不太丰富,不过考虑到G31芯片组的市场定位,这样的配置对于入门平台来说,还是足够使用的。 G41: Intel G41芯片组是一款新的入门级整合芯片组,于2008年第四季度发布。在市场定位上,G41芯片组和G31相同,最终的目的,是让G41芯片组主板取代G31芯片组主板,成为Intel平台入门级平台的首选主板。G41芯片组主板在性能上较G31芯片组主板更加强大,支持DX 10特效,并且在高清硬解方面,也支持部分格式的高清片源硬解。不过,目前G41芯片组主板的价格还是要比G31芯片组主板贵一些,可以根据使用需要进行选购。 虽然在Intel的G41芯片组系统图表上,G41芯片组使用的是ICH10(R)南桥芯片,不过在实际中,为了节约成本,降低售价,南桥芯片使用的依然是和G31芯片组相同的ICH7南桥芯片,不过,即便如此,ICH7还是能够满足用户的一般使用需求的,对这方面,不用太过在意。 G41芯片组支持Intel LGA 775封装的系列处理器,并可以支持DDR2和DDR3双通道内存,并支持PCI-E 1.1规范,提供了一条PCI-E 1.1 16X插槽,在集成显示核心方面,G41主板集成了Intel GMA X4500显示核心,该显示核心支持DX 10,并且可以支持部分格式的高清硬解。并且,G41芯片组主板可以支持DVI和Display Port视频输出。 G43: G43和G45这两款整合主板芯片组于2008年6月发布,同时发布的还有P45和P43两款非整合主板芯片组,从那时候起,Intel “4”系列的芯片组主板就开始发售,G43和G45两款芯片组是相对定位中高端的两款整合芯片组。 G43芯片组的北桥芯片方面,规格与G41芯片组有一些提升,虽然同是集成Intel GMA X4500显示核心,不过在视频输出方面,G43芯片组提供了G41所没有HDMI接口,并且,还支持PCI-E 2.0规范。南桥方面,ICH10(R)系列南桥芯片也更加的强大,不仅提供了更多的USB、SATA接口,还可以支持eSATA,并且ICH10R芯片还支持硬盘RAID 模式,并且该系列南桥提供了6条PCI-E通道,可以支持千兆网卡等等。 G45: G45芯片组是Intel系列整合芯片组中定位比较高端的,它是Intel系列整合芯片组中唯一可以实现全高清硬解的芯片组,目前在市场上,也有一些499元的G45主板出售,价格方面还是比较亲民的。 G45芯片组集成的是Intel GMA X4500HD显示核心,该显示核心要比G41和G43芯片组集成的显示核心多出“HD”字样,也就是可以实现全高清硬解。除此之外,北桥和南桥芯片其他规格和G43芯片组相同,不过在实际测试中,G45芯片组的3D性能要较G43高一些,G43又要较G41高一些,差别也不是太大。 P31: P31芯片组是作为一款入门级的非整合主板芯片组推出的,不过经过市场的洗牌,现在P31芯片组的主板已经很少能够看到了,市场上仅剩的一些P31主板,甚至在价格上比G31主板还贵,所以,使用这款芯片组的主板并不推荐选购。 P31芯片组同时搭配的是ICH7南桥,在规格放面,和G31主板基本相同,不过要比G31主板少了集成的核心,在这一点上,P31芯片组和G31芯片组各有各的优势,毕竟整合了显示核心的芯片肯定会带来更高的发热,这对于主板的稳定性会有一定的影响。 P35: 在2008年6月前,Intel的“4”系列芯片组主板还未推出的时候,P35主板就是Intel市场上的明星主板,虽然并不是“3”系列芯片组主板中规格最高的,但是,却是性能与价格最均衡的主板。不过,从有了P45芯片组主板后,拥有更强的规格的P45芯片组主板开始吸引更多用户的注意,P35芯片组主板的市场占有率就开始走了下坡路。到了现在,P35芯片组主板已经很少,同时,不少厂商为了清理最后的库存,不少P35主板都以一个很优惠的价格出售,相比同价位的P45芯片组主板,这些P35主板都有更好的用料和做工,而在超频性能方面,又要比P43更好,所以也还是有
机器人性能指标
1.自由度冗余自由度可以增加机器人的灵活性、躲避障碍物与改善动力性能。人的手臂(大 臂、小臂、手腕)共有7个自由度,所以工作起来很灵巧,手部可回避障碍而从不同方向到达同一个目的点。 2.定位精度(positioning accuracy):指机器人末端参考点实际到达的位置与所需要到达的理 想位置之间的差距。 3.重复性或重复精度:指机器人重复到达某一目标位置的差异程度;或在相同的位置指令下, 机器人连续重复若干次其位置的分散情况。它就是衡量一列误差值的密集程度,即重复度。 4.工作空间(Working Space):机器人手腕参考点或末端操作器安装点(不包括末端操作器)所 能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。 5.工作速度:机器人各个方向的移动速度或转动速度。 6.承载能力:机器人在工作范围内的任何位姿上所能承受的最大质量 工业机器人类型 首先要知道的就是您的机器人要用于何处。这就是您选择需要购买的机器人种类时的首
要条件。如果您只就是要一个紧凑的拾取与放置机器人,Scara机器人就是不错的选择。如果想快速放置小型物品,Delta机器人就是最好的选择。如果您想机器人在工人旁边一起工作,您就应该选择协作机器人。下面就是一些具体的指标。 机器人负载 负载就是指机器人在工作时能够承受的最大载重。如果您需要将零件从一台机器处搬至另外一处,您就需要将零件的重量与机器人抓手的重量计算在负载内。 自由度(轴数) 机器人轴的数量决定了其自由度。如果只就是进行一些简单的应用,例如在传送带之间拾取放置零件,那么4轴的机器人就足够了。如果机器人需要在一个狭小的空间内工作,而且机械臂需要扭曲反转,6轴或者7轴的机器人就是最好的选择。轴的数量选择通常取决于具体的应用。需要注意的就是,轴数多一点并不只为灵活性。事实上,如果您在想把机器人还用于其它的应用,您可能需要更多的轴,“轴”到用时方恨少。不过轴多的也有缺点,如果一个6轴的机器人您只需要其中的4轴,您还就是得为剩下的那2个轴编程。 机器人制造商倾向于用稍微有区别的名字为轴或者关节命名。一般来说,最靠近机器人基座的关节为J1,接下来就是J2,J3,J4以此类推,直到腕部。还有一些厂商像安川莫托曼则使用字母为轴命名。 最大运动范围 在选择机器人的时候,您需要了解机器人要到达的最大距离。选择机器人不单要关注负载,还要关注其最大运动范围。每一个公司都会给出机器人的运动范围,您可以从中瞧出就是否符合您应用的需要。最大垂直运动范围就是指机器人腕部能够到达的最低点(通常低于机器人的基座)与最高点之间的范围。最大水平运动范围就是指机器人腕部能水平到达的最远点与机器人基座中心线的距离。您还需要参考最大动作范围(用度表示)。这些规格不同的机器人区别很大,对某些特定的应用存在限制。 重复精度 这个参数的选择也取决于应用。重复精度就是机器人在完成每一个循环后,到达同一位置的精确度/差异度。通常来说,机器人可以达到0、5mm以内的精度,甚至更高。例如,如果机器人就是用于制造电路板,您就需要一台超高重复精度的机器人。如果所从事的应用精度要求不高,那么机器人的重复精度也可以不用那么高。精度在2D视图中通常用“±”表示。实际上,由于机器人并不就是线性的,其可以在公差半径内的任何位置。 速度 速度对于不同的用户需求也不同。它取决于工作需要完成的时间。规格表上通常只就是给出最大速度,机器人能提供的速度介于0与最大速度之间。其单位通常为度/秒。一些机器人制造商还给出了最大加速度。 机器人重量 机器人重量对于设计机器人单元也就是一个重要的参数。如果工业机器人需要安装在定制的工作台甚至轨道上,您需要知道它的重量并设计相应的支撑。 制动与惯性力矩 机器人制造商一般都会给出制动系统的相关信息。一些机器人会给出所有轴的制动信息。为在工作空间内确定精准与可重复的位置,您需要足够数量的制动。机器人特定部位的惯性力矩可以向制造商索取。这对于机器人的安全至关重要。同时还应该关注各轴的允许力矩。例如您的应用需要一定的力矩去完成时,就需要检查该轴的允许力矩能否满足要求。如果不能,机器人很可能会因为超负载而故障。 防护等级 这个也取决于机器人的应用时所需要的防护等级。机器人与食品相关的产品、实验室仪器、
如何看芯片资料
How to Read a Datasheet Prepared for the WIMS outreach program 5/6/02, D. Grover In order to use a PIC microcontroller, a flip-flop, a photodetector, or practically any electronic device, you need to consult a datasheet. This is the to. Where do you find datasheets? Nowadays you can find almost any datasheet on the internet, often in PDF (Acrobat) form. For example, the LM555 datasheet from National Semiconductor is on their website at https://www.360docs.net/doc/9117602166.html,.
LM555Timer General Description The LM555is a highly stable device for generating accurate time delays or oscillation.Additional terminals are provided for triggering or resetting if desired.In the time delay mode of operation,the time is precisely controlled by one external re-sistor and capacitor.For astable operation as an oscillator,the free running frequency and duty cycle are accurately controlled with two external resistors and one capacitor.The circuit may be triggered and reset on falling waveforms,and the output circuit can source or sink up to 200mA or drive TTL circuits. Features n Direct n Timing n Operates n Adjustable n Output n Output n Temperature n Normally n Available Applications n Precision n Pulse n Sequential DS007851-1 有时常规描述(General Description )会给出一些其它地方没提到的特性或者用法。特性(确认电气特性所在的条件以及特殊情况。 通常叫做等效原理图,该原理不是该芯片中必须的,但是该芯片将按照里面的来运作。它能帮助解释在数据手册中未被描述的行为。能把这个电路在面包板上搭出来吗?除非您知道那些并未给出参数的晶体管的参数。 总会有一个日期。数据手册变动,尤其是预备版或者修正版,核对一下日期。
Intel 5 系列芯片组简介
【Intel 5系列芯片组】 随着英特尔基于Lynnfield(林恩菲尔德)和Clarkdale(克拉克代尔)核心的处理器(Core i7/i5/i3)发布,配套的主板芯片也浮出水面,除商业平台的 B55和Q57外,在消费级平台上,一共有四款芯片可供选择,即P55、P57、H55和H57。 【这是2009年Intel 5系列的发布图,高端的X48、X58,主流的P、H系列】 【3芯片转变为2芯片:新的Nehalem(尼黑勒姆)架构处理器采用二芯片解决方案】 由于在Lynnfield和Clarkdale的CPU中整合了PCIE 2.0控制单元(Bloomfield无),并且Clarkdale也会整合GFX图形单元,它们的整合度比Bloomfield更高,相当于将原来北桥(GMCH,图形/存储器控制器中心,俗称为“北桥”)的大部分功能转移到了CPU中,因此英特尔抛弃了过去的三芯片结构(CPU + GMCH + ICH),开始采用新的双芯片结构(CPU + PCH,PCH为Platform Controller Hub,原研发代号为Ibex Peak)。
新的PCH芯片除了包含有原来南桥(ICH)的IO功能外,以前北桥中的Display单元、ME(Management Engine,管理引擎)单元也集成到了PCH中,另外NVM控制单元(NVRAM控制单元,Braidwood技术)和Clock Buffers也整合进去了,也就是说,PCH并不等于以前的南桥,它比以前南桥的功能要复杂得多。 CPU与PCH间会采用传统的DMI (Direct Media Interface)总线进行通信。在三芯片时代,南北桥间就是依靠DMI总线作数据交换的,但是X58芯片(北桥)与Core i7处理器间用的是QPI (Quick Path Interconnect)总线连接。DMI总线的带宽仅有2GB/s,QPI最高带宽可达到25.6GB/s,两者显然不是一个数量级的,因此有些读者可能觉得新的双芯片间数据通信会遭遇瓶颈,实际上这种担心是多余的。 以上面这个架构图来看,在CPU内部,可以分为CPU核心(绿色虚线框)和GPU核心(红色虚线框)两块,在GPU核心这一块,包含有GPU控制器、内存控制器和PCIE控制器等几部分,相当于原来意义上的北桥,CPU与GPU这两个核心间是通过QPI总线来通信的。再看蓝色虚线框内的PCH芯片,主要是一些功能性的单元,比原来的南桥功能更丰富,但它与CPU间同样不需要交换太多数据,因此连接总线采用DMI已足够了。新的Nehalem平台采用了双芯片结构,但逻辑结构上和以前三芯片是一样的。
工业机器人的基本参数和性能指标
工业机器人的基本参数和性能指标 表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。 (1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。理解机器人的工作空间时,要注意以下几点: 1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。 2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。 3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。 (2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。机器人的自由度数目越多,功能就越强。日前工业机器人通常具有4—6个自由度。当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。冗余度的出现增加了机器人工作的灵活型,但也使控制变得更加复杂。 工业机器人在运动方式上,总可以分为直线运动(简记为P)和旋转运动(简记为R)两种,应用简记符号P和R可以表示操作机运动自由度的特点,如RPRR表示机器人操作机具有四个自由度,从基座开始到臂端,关节运动的方式依次为旋转-直线-旋转-旋转。此外,工业机器人的运动自由度还有运动范围的限制。 (3)有效负载(Payload) 有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。 机器人在不同位姿时,允许的最大可搬运质量是不同的,因此机器人的额定可搬运质量是指其臂杆在工作空间中任意位姿时腕关节端部都能搬运的最大质量。 (4)运动精度(Accurucy) 机器人机械系统的精度主要涉及位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等。 位姿精度是指指令位姿和从同一方向接近该指令位姿时各实到位置中心之间的偏差。重复位姿精度是指对同指令位姿从同一方向重复响应n次后实到位姿的不一致程度。 轨迹精度是指机器人机械接口从同一方向n次跟随指令轨迹的接近程度。轨迹重复精度是指对一给定轨迹在同方向跟随n次后实到轨迹之间的不一致程度。
智能锁方案指纹锁解决方案
智能锁方案指纹锁解决方案 智能锁是指区别于传统机械锁,在用户识别、安全性、管理性方面更加智能化的锁具。门禁系统中锁门的执行部件。在安全技术防范领域,具有防盗报警功能的电子密码锁代替传统的机械式密码锁,克服了机械式密码锁密码量少、安全性能差的缺点,使密码锁无论在技术上还是在性能上都大大提高一步。随着大规模集成电路技术的发展,特别是单片机的问世,出现了带微处理器的智能密码锁,它除具有电子密码锁的功能外,还引入了智能化管理、专家分析系统等功能,从而使密码锁具有很高的安全性、可靠性,应用日益广泛。 智能锁系统软件的应用和前景 智能密码锁软件采用51系列单片机汇编语言对智能监控器和电子锁具分别编程。智能监控器软件包括键盘扫描和LCD显示程序、蜂鸣器驱动程序、时钟修改和读取程序、数据通信与预处理程序、智能化分析程序及线路监测程序等模块。电子锁具软件包括键盘扫描与译码程序、LCD显示程序、通信程序、电磁执行器驱动及检测程序、传感器接口程序等模块。软件设计过程中采用模块化设计方法,便于程序的阅读、调试和改进。智能密码锁充分利用了51系统单片机软、硬件资源,引入了智能化分析功能,提高了系统的可靠性和安全性。通过在某型号保险柜安装使用,受到用户的欢迎。另外,智能密码锁在软、硬件方面稍加改动,便可构成智能化的分布式监控网络,实现
某一范围内的集中式监控管理,在金融、保险、军事重地及其它安全防范领域具有广泛的应用前景。 智能锁的三大解决方案 基于WIFI、GSM、蓝牙网络;目前基于WIFI、GSM网络或者蓝牙的智能门锁是国内外的主流选择。这也是目前智能门锁基础的解决方案。为了防止出现手机被盗刷或者被恶意攻破的情况,这些门锁选择依旧需要传统钥匙开锁,但钥匙具备智能芯片,每次开门都会通过微信、短信的方式提醒用户。与Yale Lock类似,某国产解决方案也采用了GSM数据网络的方式,因为GSM数据网络可以走加密路线,相比WIFI等方案更为安全。为了保证安全,该方案还拥有独立的后台与云端,能够与手机连接,帮助用户通过手机及时接受和随时查询家人进出门信息,并具备远程报警。基于指纹识别生物特征;指纹门锁的思路是利用人体生物特征指纹进行身份安全识别认证开门,凭借高科技的数字图像处理、生物识别及DSP算法等技术,成为符合现代安防要求的新一代门禁系统。目前,指纹锁已经广泛运用于政府机构、军事基地、银行、公寓等需要安全和隐私的场所。旧时王谢堂前燕,飞入寻常百姓家。过去运用在相关机密场所的指纹门锁如今随着部分厂商的技术攻关也逐渐运用在了普通人群的生活之中。人脸识别和虹膜识别;随着阿里巴巴、腾讯等在金融产品中使用人脸识别,这一技术将上升到一个新高度。数据显示,2012年我国人脸识别行业市场规模约16.7亿元,预计到2015年,我国人脸识别行业市场规模将达到
电压基准芯片的参数解析及应用技巧(精)
电压基准芯片的参数解析及应用技巧 电压基准芯片是一类高性能模拟芯片,常用在各种数据采集系统中,实现高精度数据采集。几乎所有电压基准芯片都在为实现“高精度”而努力,但要在各种不同应用场合真正实现高精度,则需要了解电压基准的内部结构以及各项参数的涵义,并要掌握一些必要的应用技巧。 电压基准芯片的分类 根据内部基准电压产生结构不同,电压基准分为:带隙电压基准和稳压管电压基准两类。带隙电压基准结构是将一个正向偏置PN结和一个与VT(热电势)相关的电压串联,利用PN结的负温度系数与VT的正温度系数相抵消实现温度补偿。稳压管电压基准结构是将一个次表面击穿的稳压管和一个PN结串联,利用稳压管的正温度系数和PN结的负温度系数相抵消实现温度补偿。次表面击穿有利于降低噪声。稳压管电压基准的基准电压较高(约7V);而带隙电压基准的基准电压比较低,因此后者在要求低供电电压的情况下应用更为广泛。 根据外部应用结构不同,电压基准分为:串联型和并联型两类。应用时,串联型电压基准与三端稳压电源类似,基准电压与负载串联;并联型电压基准与稳压管类似,基准电压与负载并联。带隙电压基准和稳压管电压基准都可以应用到这两种结构中。串联型电压基准的优点在于,只要求输入电源提供芯片的静态电流,并在负载存在时提供负载电流;并联型电压基准则要求所设置的偏置电流大于芯片的静态电流与最大负载电流的总和,不适合低功耗应用。并联型电压基准的优点在于,采用电流偏置,能够满足很宽的输入电压范围,而且适合做悬浮式的电压基准。 电压基准芯片参数解析 安肯(北京)微电子即将推出的ICN25XX系列电压基准,是一系列高精度,低功耗的串联型电压基准,采用小尺寸的SOT23-3封装,提供1.25V、2.048V、2.5V、3.0V、3.3V、4.096V输出电压,并提供良好的温度漂移特性和噪声特性。
主板芯片组详解
[转帖]主板芯片组详解 Intel 845E Intel 845E是为了533MHz外频Pentium 4推出的DDR芯片组,它正式支持533MHz的系统前端总线,支持DDR266的内存规范,由于i845PE的推出,其价格势必降低,也是其成为一款高性价比的主流芯片组,很适合对性能要求较高和资金又不很充裕的用户购买,其支持533MHz的系统前端总线,在升级上也有较大的空间。 i845E芯片组由北桥芯片82845E GMCH和南桥芯片ICH4组成,继续使用i845的架构,南桥采用了ICH4芯片,支持增强型的六声道 AC97音效控制器和USB 2.0的通用串行总线传输规范。 技术规范 支持 Intel Pentium4 处理器 提供 400/533MHz 系统前端总线 支持 AGP 2X/4X 支持最多 2.0GB DDR200/266 SDRAM 南北桥芯片之间采用Intel Hub Architecture总线连接,提供高达266MB/s 数据传输宽带 支持网络唤醒功能 内建 AC-97控制芯片 内建 10/100M以太网络适配器 支持 ATA 33/66/100/磁盘传输界面 支持 6个USB 2.0接口 支持高级电源管理功
Intel 845D i845D是第一代的基于Pentium 4处理器的DDR整合型芯片组,由于i845使用SDRAM的效能实在无法满足Pentium 4处理器的需求,使得Pentium 4处理器在家用主流系统的性能表现平平,但i850芯片组的价格有过高,在这样的情形下,intel只好回到DDR SDRAM的的怀抱,i845D就是Intel在i845芯片组的基础上改进其内存管理器,使其支持DDR200/266的SDRAM,在DDR内存的帮助下,Pentium 4的性能得到了长足的提高,其合理的价格也使得Pentium 4处理器迅速的流行起来。但Intel官方并没有用i845D为其命名,而是用其代替了原来的i845,由于其推出的时间较长,其价格已经大幅降低,其性能表现仍然不差,搭配400外频的Pentium 4十分理想,是一个高性价比的组合,配合一款600元左右的Gefcrce 3 Ti显卡,满全可以满足大部分个人用户和游戏爱好者的需求。 i845D芯片组由北桥芯片82845 MCH和南桥芯片ICH2组成,作为第一款P4平台的DDR芯片组,其同时兼容DDRAM和SDRAM内存,而且南桥芯片ICH2整合了10/100M自适应以太网络控制器、6声道AC97音效控制器以及USB 1.1的支持,其外设的扩展能力还是十分强大的。 技术规范 支持 Intel Pentium4 处理器 提供 400系统前端总线 支持最多 2.0GB DDR200/266/PC133 SDRAM 南北桥芯片之间采用Intel Hub Architecture总线连接,提供高达266MB/s 数据传输宽带 支持网络唤醒功能 内建 AC-97控制芯片
工业机器人的基本参数和性能指标知识讲解
工业机器人的基本参数和性能指标
工业机器人的基本参数和性能指标 表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。 (1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。理解机器人的工作空间时,要注意以下几点: 1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。 2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。 3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。 自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。机器人的自由度数目越多,功能就越强。日前工业机器人通常具有4—6个自由度。当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。冗余度的出现增加了机器人工作的灵活型,但也使控制变得更加复杂。 工业机器人在运动方式上,总可以分为直线运动(简记为P)和旋转运动(简记为R)两种,应用简记符号P和R可以表示操作机运动自由度的特点,如RPRR表示机器人操作机具有四个自由度,从基座开始到臂端,关节运动的方式依次为旋转-直线-旋转-旋转。此外,工业机器人的运动自由度还有运动范围的限制。 (3)有效负载(Payload) 有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。 机器人在不同位姿时,允许的最大可搬运质量是不同的,因此机器人的额定可搬运质量是指其臂杆在工作空间中任意位姿时腕关节端部都能搬运的最大质量。
Intel 7系芯片组详尽说明
Intel 7系芯片组详尽、权威规格对比 由于型号达到了九款之多,包括桌面四款Z77、H777、Z75、B75,笔记本五款HM77、HM76、HM75、HM70、UM77相互之间的规格差异显得相当繁琐,因此我们特意搜集整理了来自Intel官方的一些技术资料,对这九款芯片组的异同做一个归纳总结。Intel 7系列芯片组采用65nm工艺制造,FCBGA封装,其中桌面版尺寸27×27毫米,焊球数量942个,球间距0.7毫米,热设计功耗6.7W,移动版尺寸25×25毫米,焊球数量989个,球间距0.6毫米,热设计功耗4.1W、待机3.7W,只有面向超极本的UM77为3.0W。 价格方面和之前披露的相同,桌面版四款依次为48美元、43美元、40美元、37美元,移动版中只公开了HM77、HM76分别为48美元、43美元,其它不详。 Intel 7系列桌面芯片组规格对比
Intel 7系列笔记本芯片组规格对比 解析—— PCI-E 2.0端口:除了HM70、UM77都是四个之外,其它均为八个,都能拆分成x1、x2或者x4。 PCI总线:只有B75保留了原生支持,其它全部砍掉,相应主板只能借助第三方桥接芯片支持。 USB 3.0/2.0接口:Z77、H77、Z75、HM77都是完整的4/10个,B75、HM76减少到4/8个,UM77是4/6个,HM70只剩下2/6个,HM75则是0/12个(即不支持USB 3.0)。 SATA 6Gbps/3Gbps接口:Z77、H77、Z75、HM77、HM76、HM75都是完整的2/4个,B75改为1/5个,HM70、UM70则是1/3个。 整合图形核心:全部支持,P67之类的悲剧不会重演。 视频输出:除了UM77不支持VGA/LVDS之外(超极本放不下这个),其它都是所有规格都支持,包括 VGA/DVI/HDMI/DisplayPort/eDP。 WiDi 3.0无线显示技术:笔记本型号全都有,但需要配合相应模块才行。 AHCI:全部支持。 RAID 0/1/5/10磁盘阵列:Z77、H77、Z75、HM77、UM77支持。 SRT固态硬盘加速技术:Z77、H77、HM77、UM77支持。 ATT防盗技术:全部支持。 AMT 8.0主动管理技术:全部不支持。 SBA小型商业优势技术:B75、HM77、UM77支持。 RST快速启动技术:全部支持,但需要搭配特定的Ivy Bridge处理器。 ACPI S1睡眠状态:全部支持。 HD Audio高保真音频:全部支持。 千兆以太网MAC:全部支持。
指纹识别系统(文献综述)
指纹识别方法的综述 摘要 : 对在指纹的预处理和特征提取、指纹分类、指纹的匹配过程中的方向图、滤波器、神经网络等关 键性原理和技术做了详细的说明, 并对在各个过程中用到的方法做了进一步的比较, 讨论了各种方法的优越性。 0引言 自动指纹识别是上世纪六十年代兴起的,利用计算机取代人工来进行指纹识别的一种方法。 近年 来, 随着计算机技术的飞速发展,低价位指纹采集仪的出现以及高可靠算法的实现,更使得自动指纹识 别技术越来越多地进入到人们的生活和工作中, 自动指纹识别系统的研究和开发正在成为国 内外学术 界和商业界的热点。相对于其他生物特征鉴别技术例如语音识别及虹膜识别, 指纹识别具有许多独到 的优点 ,更重要的是它具有很高的实用性和可行性,已经被认为是一种理想的身份认证技术 有着十分 广泛的应用前景, 是将来生物特征识别技术的主流。 , 1指纹取像 图1 是一个自动指纹识别系统 AFIS(Automated Fingerprint Identification System)的简单流程。 指纹取像→ 图像预处理 → 特征提取 → 指纹识别 ↓↑ 数据库管理———— 将一个人的指纹采集下来输入计算机进行处理是指纹自动识别的首要步骤。指纹图像的获取主要利用设备取像,方便实用 , 比较适合 AFIS 。利用设备取像的主要方法又利用光学设备、晶 体传感器和超声波来进行。光学取像设备是根据光的全反射原理来设计的。晶体传感器取像是根据谷线和脊线皮肤与传感器之间距离不同而产生的电容不同来设计的。超声波设备取像也是采用光波来取像,但由于超声波波长较短,抗干扰能力较强,所以成像的质量非常好。 2图像的预处理与特征提取 无论采取哪种方法提取指纹 ,总会给指纹图像带来各种噪声。预处理的目的就是去除图像中的 噪 音,把它变成一幅清晰的点线图 ,以便于提取正确的指纹特征。预处理是指纹自动识别过程的第 一步 , 它的好坏直接影响着指纹识别的效果。常用的预处理与特征提取( Image Preprocessing and Feature Ex2 t raction) 方法的主要步骤包括方向图计算、图像滤波、二值化、细化、提取特征和后处理。 当然这些步骤 可以根据系统和应用的具体情况再进行适当变化。文献[ 1 ] 提出了基于脊线跟踪的方法能够
指纹识别技术原理及发展
指纹识别技术的基本原理 指纹其实是比较复杂的。与人工处理不同,许多生物识别技术公司并不直接存储指纹的图象。多年来在各个公司及其研究机构产生了许多数字化的算法(美国有关法律认为,指纹图象属于个人隐私,因此不能直接存储指纹图象)。但指纹识别算法最终都归结为在指纹图象上找到并比对指纹的特征。 指纹的特征 我们定义了指纹的两类特征来进行指纹的验证:总体特征和局部特征。总体特征是指那些用人眼直接就可以观察到的特征,包括: 环型(loop), 弓型(arch), 螺旋型(whorl)。其他的指纹图案都基于这三种基本图案。仅仅依靠图案类型来分辨指纹是远远不够的,这只是一个粗略的分类,但通过分类使得在大数据库中搜寻指纹更为方便 1、模式区(Pattern Area) 模式区是指指纹上包括了总体特征的区域,即从模式区就能够分辨出指纹是属于那一种类型的。有的指纹识别算法只使用模式区的数据。Aetex 的指纹识别算法使用了所取得的完整指纹而不仅仅是模式区进行分析和识别。
2、核心点(Core Point) 核心点位于指纹纹路的渐进中心,它用于读取指纹和比对指纹时的参考点。 3、三角点(Delta) 三角点位于从核心点开始的第一个分叉点或者断点、或者两条纹路会聚处、孤立点、折转处,或者指向这些奇异点。三角点提供了指纹纹路的计数和跟踪的开始之处。 4、式样线(Type Lines) 式样线是在指包围模式区的纹路线开始平行的地方所出现的交叉纹路,式样线通常很短就中断了,但它的外侧线开始连续延伸。 5、纹数(Ridge Count) 指模式区内指纹纹路的数量。在计算指纹的纹数时,一般先在连接核心点和三角点,这条连线与指纹纹路相交的数量即可认为是指纹的纹数。局部特征局部特征是指指纹上的节点。两枚指纹经常会具有相同的总体特征,但它们的局部特征——节点,却不可能完全相同。 6、节点(Minutia Points) 指纹纹路并不是连续的,平滑笔直的,而是经常出现中断、分叉或打折。这些断点、分叉点和转折点就称为“节点”。就是这些节点提供了指纹唯一性的确认信息。 指纹上的节点有四种不同特性:
焊接机器人主要技术指标
焊接机器人主要技术指标 选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人的主要技术指标可分为两大部分,机器人的通用指标和焊接机器人的专门指标。 (1) 机器人通用技术指标 1) 自由度数这是反映机器人灵活性的重要指标。一般来说,有3 个自由度数就可以达到机器人工作空间任何一点,但焊接不仅要达到空间某位置,而且要保证焊枪( 割具或焊钳) 的空间姿态。因此,对弧焊和切割机器人至少需要5 个自由度,点焊机器人需要6 个自由度。 2) 负载指机器人末端能承受的额定载荷,焊枪及其电缆、割具及气管、焊钳及电缆、冷却水管等都属负载。因此,弧焊和切割机器人的负载能力为6 ~10kg,点焊机器人如使用一体式变压器和焊钳一体式焊钳,其负载能力应为60 ~90kg ,如用分离式焊钳,其负载能力应为40 ~50kg。 3) 工作空间厂家所给出的工作空间是机器人未装任何末端操作器情况下的最大可达空间,用图形来表示。应特别注意的是,在装上焊枪( 或焊钳) 等后,又需要保证焊枪姿态。实际的可焊接空间,会比厂家给出的小一层,需要认真地用比例作图法或模型法核算一下,以判断是否满足实际需要。 4) 最大速度这在生产中是影响生产效率的重要指标。产品说明书给出的是在各轴联动情况下,机器人手腕末端所能达到的最大线速度。由于焊接要求的速度较低,最大速度只影响焊枪( 或焊钳) 的到位、空行程和结束返回时间。一般情况下,焊接机器人割机器人要视不同的切割方法而定。 5) 点到点重复精度这是机器人性能的最重要指标之一。对点焊机器人,从工艺要求出发,其精度应达到焊钳电极直径的1/2 以下,即+ 1 ~2mm 。对弧焊机器人,则应小于焊丝直径的1/2 ,即0.2 ~0.4mm 。 6) 轨迹重复精度这项指标对弧焊机器人和切割机器人十分重要,但各机器人厂家都不给出这项指标,因为测量比较复杂。但各机器人厂家内部都做这项测量,应坚持索要其精度数据,对弧焊和切割机器人,其轨迹重复精度应小于
基于MATLAB的指纹识别系统(开题报告)
重庆工商大学 毕业论文(设计)开题报告计算机科学与信息工程学院 (系)测控技术与仪器专业(本科) 2006级1班课题名称:基于MATLAB的指纹图像预处理系统设计 毕业论文(设计)起止时间: XX年XX 月XX 日~ XX 月XX日(共XX周) 学生姓名:XX 学号:XX 指导教师: XX 报告日期: XX学毕业论文(设计)开题报告3-1
1.本课题所涉及的问题在国内(外)的研究现状综述 1、指纹识别及其优点。人手的指纹即为手指皮肤上的花纹, 它是人的一种生物特征。该特征具有独特的性质, 其花纹的细节由细微纹点和纹脊的起点、终点、分叉、结合等组成。正是这些无穷无尽的细节特征组合构成了指纹 10, 几乎为零, 这就构成了指纹的第一大特的唯一性。事实上, 甚至包括双胞胎, 世界上两个指纹相同的几率<1/9 点。指纹特征的另外几大特点是: 不变性——即指纹的图案永远不会改变; 与主体永不分离性——即指纹不存在丢失、遗忘、被窃取的可能; 指纹的使用比起其它证卡来说更快捷、安全、准确、无干扰, 可实现快速登录注册, 系统兼容性好, 也就是说可以独立或者通过联网构成系统且很容易并入各类证卡和定义识别系统中。因此, 指纹识别技术的应用范围极广(除化学家和矿工外均能鉴定)。 2、指纹自动识别系统的发展现状。指纹自动识别系统是集计算机、网络、光电技术、图像处理、智能卡、数据库技术等于一体的综合高技术。目前的指纹自动识别系统是采用先进的光电识别办法采集一个指纹信息, 并把它变成可以和已由计算机处理过的暗码相比对的代码。这些代码都经过加密处理, 然后经独特的相关算法进行识别判断, 在算法上有的采用是一个指纹的全部图案, 而有的是指纹的特殊细节。 目前的自动指纹识别系统已具有如下特点:(1) 可靠性: 采用独特的容错技术, 既使指纹有破坏, 即指纹不全或指纹随时间有自然的变化时也不影响正确识别。(2) 快捷性: 大多数系统鉴别时间仅需1~3s, 登录注册一个新客户只需1m in 的时间。(3) 灵活性: 一个指纹信息的代码可以压缩到几十个字节到几百个字节, 因此可以存放在一个磁条上或者一张两维条码卡上或者IC 卡上, 甚至几个指纹代码可以存在一张智能卡上。当然, 成千上万的代码可以存放在局域或网络化数据库中, 这样, 代码可以沿网络迅速传输, 因而可以灵活的构成各类系统, 即可以独立使用或集成到一个大范围的出入口控制或者安全处理系统如证卡存档识别系统中。( 4) 可接受性: 一个因素是目前的系统具有高性能; 另一个因素是目前的系统设计已考虑到人类工程学设计, 因而易被用户接受。(5) 安全性: 所有个人代码都经过了特殊加密, 通过所存储的代码不可能复原原指纹, 彻底避免了指纹的冒用, 因此既使证卡丢失, 也不存在安全问题。(6) 方便性: 目前出现的各类指纹识别系统一般外观设计精巧、结实, 采用了精密独特的光电系统, 具有LD 或全程液晶提示, 备有多种安装模式。(7) 兼容性: 可以与现有的各类系统兼容, 可实现全自动化的识别。(8) 实时性: 可实现完整的跟踪、实时报警功能。正是由于目前已经开发出了具有如上特点的指纹识别技术, 因此以此为基础的个人识别技术, 即证卡、代码、指纹的综合动态模式组合, 将可以对不同的应用场所提供不同的安全等级。 3、市场前景。自动指纹识别系统有着极其广阔的应用前景。众所周知, 指纹识别最早是在罪犯鉴别中应用, 它对于提高侦破手段、震慑罪犯、打击刑事犯罪成为强有力的武器并起到了重要作用。根据目前的了解,A F IS 的其它适用场所为: 政府各类机要部门(例如档案馆(室)、机要室)、国家重点实验室及生产重地、机场、军事要地(例如基地、仓库)、重要军事装备或关键设备的启动控制、银行金库、金融系统、代保管库、博物馆、珍宝馆、高级住宅、高级宾馆等重要门禁或入口控制、汽车门锁等。除此之外, 另一大潜在应用前景是: 自动取款机(A TM )、信用卡、驾驶执照、身份证、医疗健康卡、移民登记、计算机系统安全、机械登记等方面。1、指纹锁,指纹锁可以装在门里、车内、保险箱柜的内部, 外面无锁眼, 从而避免了撬锁, 可广泛用于金库、保安、银行、出纳、自动门、百叶门、保险柜、电控装置等门禁系统中。2,指纹卡,国际上偷盗使用卡和利用信用卡进行诈骗犯罪活动越来越猖獗, 仅1995 年英国因此损失8 千万英镑, 法国损失3100 万英镑, 目前我国信用卡用户已达2~ 3 千万, 利用信用卡犯罪我国也在呈不断上升趋势。我国政府打算用10 年左右的时间, 在全国400 多个城市的3亿人中推广信用卡, 预计发行量将达到2 亿张。目前我国IC 卡年产量已达6 千万张, 生产能力已达1 亿张, 全世界到2000 年IC 卡的总需求超过38 亿张, 我国需求量为年均2 千万张。目前, 国内各种磁卡、IC 卡系统已十分普遍。例如: 大庆市1996 年已拥有医疗保险IC 卡80 万张, 全国联网的200 电话磁卡已有上百万用户。由于指纹识别技术的诸多优点, 可以预料, 一方面指纹卡将会在一切需要验证身份的场所发挥越来越重要的作用, 其应用领域将会进一步拓宽; 另一方面, 由于市场的推动, 指纹识别技术也会不断提高, 在其识别可靠性、速度、成本等方面进一步朝实用化迈进。我们期待着指纹识别这一高技术在人们的生活中起到应有的越来越重要的作用。