单片机实例20-26——【全国大学生电子设计大赛】
20.数字钟﹝★﹞
1.实验任务
(1.开机时,显示12:00:00的时间开始计时;
(2.P0.0/AD0控制“秒”的调整,每按一次加1秒;
(3.P0.1/AD1控制“分”的调整,每按一次加1分;
(4.P0.2/AD2控制“时”的调整,每按一次加1个小时;
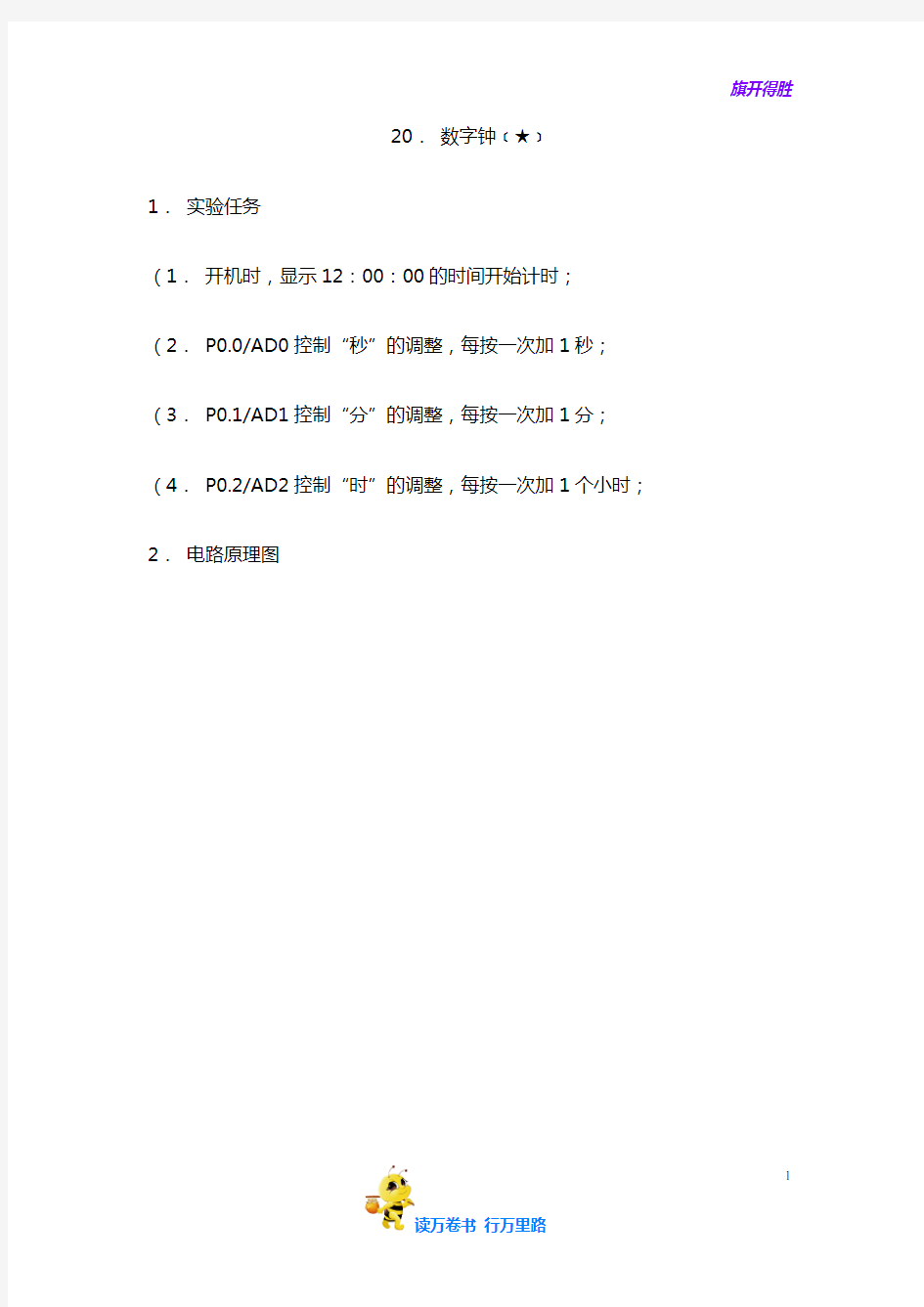
2.电路原理图
1
图4.20.1
3.系统板上硬件连线
(1.把“单片机系统”区域中的P1.0-P1.7端口用8芯排线连接到“动态数码显示”区域中的A-H端口上;
2
(2.把“单片机系统:区域中的P3.0-P3.7端口用8芯排线连接到“动态数码显示”区域中的S1-S8端口上;
(3.把“单片机系统”区域中的P0.0/AD0、P0.1/AD1、P0.2/AD2端口分别用导线连接到“独立式键盘”区域中的SP3、SP2、SP1端口上;4.相关基本知识
(1.动态数码显示的方法
(2.独立式按键识别过程
(3.“时”,“分”,“秒”数据送出显示处理方法
5.程序框图
3
4
全国大学生机械产品数字化设计大赛作品说明书概要
全国大学生数字化机械产品设计大赛作品说明书 聚会用快速布场机器人 作者:王腾丁振宇时贝超(排名不分先后指导老师:朱衍飞 学校:合肥工业大学 2 目录 作品背景 (4 作品特点 (4 作品结构 (5 作品工作原理 (5 1.攀爬系统工作原理 (6 ①爬壁机构工作原理 (6 ②跨墙壁攀爬工作原理 (9 2.悬挂横幅系统工作原理 (9 3.控制系统工作原理 (9 4.供电系统工作原理 (12 5.传感器系统工作原理 (13
6.电机系统工作原理 (15 7.功能系统工作原理 (15 作品主要创新点 (16 作品市场潜在价值 (17 参考文献 (18 附录 (19 一,作品背景 现代社会,人与人之间交流越来越频繁,交流的形式也多种多样,其中,聚会作为极为重要的一种形式,已越来越被人们青睐。 聚会,就要有聚会的场合。聚会的场合不同于教学,办公场合那样有固定的场合,它是随着聚会的内容,聚会的人员,聚会的时间,聚会的地点而决定的。而日常生活中所能提供的场所又相对固定,那么可以解决人们与日俱增的聚会次数,多种多样的聚会形式和固定单调的聚会场所之间的矛盾么? 答案是肯定的。随着科技的飞速发展,机器人技术正在悄悄改变着我们的生活。爬墙机器人作为机器人家族中重要的分支,已被越来越多的人所重视。我们将先进的机器人技术用于解决实际生活中的问题,基于爬墙机器人工作原理,设计出聚会用快速布场机器人,可以很好的解决这样的问题。 二,作品特点 1.内置储存卡和音响,用户可将聚会时所需的音乐拷贝至储存卡中,再由机器人沿室内墙壁爬至天花板,用机器人强大的吸力将自己牢牢固定在天花板上,这时机器人就成为了一个高品质的音响,可为用户聚会时提供全环绕,堪比舞厅的音乐环境。
光电设计大赛
长春理工大学 第六届光电设计大赛理论方案报告 编号: 参赛题目:基于光电目标识别的空投救援无人飞行器参赛队伍名称:乐恩竞技者 所在学校:长春理工大学 队长姓名: 联系方式:
一、参赛题目:基于光电目标识别的空投救援无人飞行器 二、具体方案 无人飞行器采用四旋翼飞行器,系统主要由stm32控制模块、姿态采集模块、电源模块、电机驱动模块、超声波测距模块和CCD图像处理模块等七部分组成,采用十字型飞行模式。整套系统运行模式流程主要是:首先飞行器装载启动,自动定高沿着场地中间白色界线向前匀速飞行。飞行至场地底部边线后,切换飞行模式,CCD相机对目标进行识别,然后将所载的乒乓球投到相应的盒子里。最后原路返航至起点进行下一次装载投掷。 2.1控制系统的选择方案 主控板使用stm32。Stm32板子的I/O口很多,自带定时器和多路PWM,可以实现的功能较多,符合实验要求。Stm32迷你板在体积和重量上也不是很大,对飞机的载重量要求不是很高。 2.2飞行姿态控制方案 十字飞行方式。四轴的四个电机以十字的方式排列,x轴和y轴成直角,调整俯仰角和翻滚角的时候分开调整,角度融合简单,适合初学者,能明确头尾,飞行时机体动作精准,飞控起来也容易。鉴于我们是初次设计,所以选择了十字飞行方式。 2.3角度测量模块的方案 MPU6050三轴陀螺仪。MPU6050三轴陀螺仪就是可以在同一时间内测量三个不同方向的加速度、角速度、角度。单轴的话,就只可以测定一个方向的量,那么一个三轴陀螺就可以代替三个单轴陀螺。它现在已经成为激光陀螺的发展趋向,具有可靠性很好、结构简单不复杂、重量很轻和体积很小等等特点,但是其输出数据需要大量的浮点预算才能保证较高的精度,这样会影响主控板对最终的姿态控制的响应速率。 2.4CCD相机图像识别的方案 使用彩色摄像头,由于红线和地面颜色不同,通过颜色的不同进行红线提取。基本思路和第一种有相似之处,但是效果更好,但是处理的数据量较第一种方案要多,采集速度需要提高,因此使用DMA快速读取,这样不占据CPU时间,提高效率。同时降低图像大小,采用QQVGA(120*160)图像格式,这样能够减少图像处理的时间,提高效率。
电子设计大赛报告.doc
自动搬运机器人 王泽栋1 曹嘉隆1 高召晗1 杨超2 (1.电子信息工程系学生,2.电子信息工程系教师) 【摘要】 本设计与实作是利用反射式红外线传感器所检测到我们所要跑的路线,我们以前后车头共4颗红外感应传感器TCRT5000来检测黑色路线,并利用Atmel 公司生产的8位单片机AT89S52单片机做决策分析。,将控制结果输出至直流电机让车体自行按预先设计好的路线行走。以AT89S52晶片控制自动搬运机器人的行径,藉由自动搬运的制作过程学习如何透过程式化控制流程、方法与策略、利用汇编语言控制电机停止及正反转,使自动搬运机器人能够沿轨道自行前进、后退以及转弯。目的是在于让车子达到最佳效能之后,参加比赛为最终目的。自动搬运机器人运行过程中会遇到直线、弯道、停止。该设计集检测,微控等技术为一体,运用了数电、模电和小系统设计技术。该设计具有一定的可移植性,能应用于一些高难度作业环境中。 【关键词】自动搬运;黑线检测;时间显示。 1.系统方案选择和论证 1.1 系统基本方案 根据要求,此设计主要分为控制部分和检测部分,还添加了一些电路作为系统的扩展功能,有电动车每一次往返的时间(记录显示装置需安装在机器人上)和总的行驶时间的显示。系统中控制部分包括控制器模块、显示模块及电动机驱动模块。信号检测部分包括黑线检测模块。系统方框图如图1.1.1 图1.1 系统方框图 1.2各模块方案的比较与论证 (1)控制器模块 根据设计要求,控制器主要用于信号的接收和辨认控制电机的正反转、小车的到达直角转弯处的转向、时间显示。 方案一:采用MCS-51系列单片机价格低、体积小、控制能力强。 方案二:采用与51系列单片机兼容的Atmel公司的AT89S52作为控制器件
历年全国大学生电子设计大赛题目
1994~2009全国大学生电子设计竞赛历届题目一览 第一届(1994年)全国大学生电子设计竞赛题目 题目一简易数控直流电源 题目二多路数据采集系统 第二届(1995年)全国大学生电子设计竞赛题目 题目一实用低频功率放大器 题目二实用信号源的设计和制作 题目三简易无线电遥控系统 题目四简易电阻、电容和电感测试仪 第三届(1997年)全国大学生电子设计竞赛题目 A题直流稳定电源 B题简易数字频率计 C题水温控制系统 D题调幅广播收音机* 第四届(1999年)全国大学生电子设计竞赛题目 A题测量放大器 B题数字式工频有效值多用表 C题频率特性测试仪 D题短波调频接收机 E题数字化语音存储与回放系统 第五届(2001年)全国大学生电子设计竞赛题目 A题波形发生器 B题简易数字存储示波器 C题自动往返电动小汽车 D题高效率音频功率放大器 E题数据采集与传输系统 F题调频收音机 第六届(2003年)全国大学生电子设计竞赛题目 电压控制LC振荡器(A题) 宽带放大器(B题) 低频数字式相位测量仪(C题) 简易逻辑分析仪(D题) 简易智能电动车(E题) 液体点滴速度监控装置(F题) 第七届(2005年)全国大学生电子设计竞赛题目 正弦信号发生器(A题) 集成运放参数测试仪(B题) 简易频谱分析仪(C题)
单工无线呼叫系统(D题) 悬挂运动控制系统(E题) 数控直流电流源(F题) 三相正弦波变频电源(G题) 第八届(2007年)全国大学生电子设计竞赛题目音频信号分析仪(A题)【本科组】 无线识别装置(B题)【本科组】 数字示波器(C题)【本科组】 程控滤波器(D题)【本科组】 开关稳压电源(E题)【本科组】 电动车跷跷板(F题)【本科组】 积分式直流数字电压表(G题)【高职高专组】 信号发生器(H题)【高职高专组】 可控放大器(I题)【高职高专组】 电动车跷跷板(J题)【高职高专组】 第九届(2009年)全国大学生电子设计竞赛题目光伏并网发电模拟装置(A题)【本科组】 声音导引系统(B题)【本科组】 宽带直流放大器(C题)【本科组】 无线环境监测模拟装置(D题)【本科组】 电能收集充电器(E题)【本科组】 数字幅频均衡功率放大器(F题)【本科组】 低频功率放大器(G题)【高职高专组】 LED点阵书写显示屏(H题)【高职高专组】
2017全国大学生电子设计竞赛设计报告
2017年全国大学生电子设计竞赛简易水情检测系统(P题) 2017年8月12日
摘要 本设计的是简易水情检测系统以STC89C52芯片为核心,辅以相关的外围电路,设计了以单片机为核心的水情检测系统。系统主要由5V电源供电。在硬件电路上在,用总线连接PH值传感器和水位传感器,通过传感器收集到的水情数据发送到单片机,单片机存储实时数据,并显示在12864LCD液晶屏上。在软件方面,采用C语言编程。通过对单片机程序设计实现对水情检测系统的水情数据的采集、显示和检测。 关键词:单片机最小系统;PH值传感器;水位传感器;AD模块 Abstract The design is a simple water regime detection system to STC89C52 chip as the core, supplemented by the relevant external circuit, designed to single-chip as the core of the water regime detection system. The system is powered by 5V power supply. In the hardware circuit, with the bus connection PH sensor and water level sensor, through the sensor to collect the water data sent to the microcontroller, single-chip storage of real-time data, and displayed on the 12864LCD LCD screen. In software, the use of C language programming. Through the single-chip program design to achieve the water regime detection system of water data collection, display and detection. Key words:single chip minimum system; PH value sensor; water level sensor; capacitance
第一届四川省光电设计竞赛题目及评分细则20171013
第一届四川省大学生光电设计竞赛 赛题细则及评分标准 赛题题目:光电“寻的”智能小车 竞赛说明:设计一辆光电“寻的”智能小车,要求能够从指定位置出发,快速搜寻场地周边随机点亮的信号灯。信标灯(LED 灯)亮灯顺序随机,且每个灯熄灭后不再亮起。 图1 场地示意图 竞赛总则:比赛分为场地比赛和答辩两个环节。场地为半个标准羽毛球场,如图1所示。各参赛队设计的智能小车放于场地中的指定发车位置,场地周边所标记的内侧白线上或者白线范围内随机放置12个信标灯(LED灯)。智能小车从指定位置出发后,场地周边的信标灯将随机点亮,在规定的比赛时间内,以智能小车成功熄灭信标灯的个数计算场地比赛得分,根据场地比赛成绩排序评出各等奖项候选参赛队,参赛队伍总数的前15%,还应参加答辩比赛并获得答辩成绩,再从中选出一等奖。 一、竞赛细则: 1)智能小车:由参赛队自备,横向宽度不大于0.3 m,长度(包括传感器和磁
铁部分)不大于0.4m,高度不高于0.5 m,无其它特殊设计要求。 2)比赛场地:室内半个标准羽毛球场,地面颜色为绿色,边界线为白色。比赛 时处于体育馆常用照明状态。 3)比赛时间和次数:每支参赛队伍比赛的总时间不超过20分钟。计时从场地 裁判示意参赛队伍入场时开始。其中:现场调试时间不超过8分钟,比赛时间:从智能小车启动至比赛结束,每次5分钟。每支参赛队计时比赛2次,由队长签字选取其中1次成绩为竞赛成绩。超出比赛时间内未完成比赛的,由裁判终止当次比赛。 4)出发区:出发区位于场地中央位置,面积为1.00×1.00m2。边界用黑色胶带标 示,智能小车必须在该区域出发,违反规定者由裁判终止当次比赛。 5)信标灯设计:信标采用半球全向灯座,内部安装有红色高亮度发光二极管 (LED)阵列,可以通过比赛系统控制信标闪烁或者熄灭。智能小车可以通过光电传感器、摄像头等识别信标的红光进行定位。信标灯系统由比赛组织方制作。外形尺寸如图2所示: 图2 信标灯示意图 半球全向灯座直径为10cm,外部放置线圈,线圈直径45cm,智能小车可以在小车任意位置放置一块磁铁,磁铁形状为圆形,尺寸为:厚度小于等于5mm,直径小于等于20mm。磁铁安装高度距离地面的高度在10mm~15mm。开始比赛后,比赛系统自动会点亮第一个信标灯。信标灯处于常亮状态,不会闪
全国电子设计大赛资料报告材料一等奖
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 摘要: 通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D 采样后反馈给主控制器。控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D的值,同时由显示模块显示当前的P、D值。 关键字: 倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法
目录 一、设计任务与要求 (3) 1 设计任务 (3) 2 设计要求 (3) 二系统方案 (4) 1 系统结构 (4) 2 方案比较与选择 (4) (1)角度传感器方案比较与选择 (4) (2)驱动器方案比较与选择 (5) 三理论分析与计算 (5) 1 电机的选型 (5) 2 摆杆状态检测 (5) 3 驱动与控制算法 (5) 四电路与程序设计 (6) 1 电路设计 (6) (1)最小系统模块电路 (6) (2)5110显示模块电路设计 (7) (3)电机驱动模块电路设计 (8) (4)角位移传感器模块电路设计 (8) (5)电源稳压模块设计 (8) 2 程序结构与设计 (9) 五系统测试与误差分析 (10) 5.1 测试方案 (10) 5.2 测试使用仪器 (10) 5.3 测试结果与误差分析 (10) 6 结论 (11) 参考文献 (11) 附录1 程序清单(部分) (12) 附录2 主板电路图 (15) 附录3 主要元器件清单 (16)
2009年全国大学生电子设计大赛题目(全)
光伏并网发电模拟装置(A 题) 【本科组】 一、任务 设计并制作一个光伏并网发电模拟装置,其结构框图如图1所示。用直流稳压电源U S 和电阻R S 模拟光伏电池,U S =60V ,R S =30Ω~36Ω;u REF 为模拟电网电压的正弦参考信号,其峰峰值为2V ,频率f REF 为45Hz~55Hz ;T 为工频隔离变压器,变比为n 2:n 1=2:1、n 3:n 1=1:10,将u F 作为输出电流的反馈信号;负载电阻R L =30Ω~36Ω。 R L U S 图1 并网发电模拟装置框图 二、要求 1.基本要求 (1)具有最大功率点跟踪(MPPT )功能:R S 和R L 在给定范围内变化时, 使d S 1 2 U U =,相对偏差的绝对值不大于1%。 (2)具有频率跟踪功能:当f REF 在给定范围内变化时,使u F 的频率f F =f REF , 相对偏差绝对值不大于1%。 (3)当R S =R L =30Ω时,DC-AC 变换器的效率η≥60%。 (4)当R S =R L =30Ω时,输出电压u o 的失真度THD ≤5%。 (5)具有输入欠压保护功能,动作电压U d (th )=(25±0.5)V 。 (6)具有输出过流保护功能,动作电流I o (th )=(1.5±0.2)A 。 2.发挥部分 (1)提高DC-AC 变换器的效率,使η≥80%(R S =R L =30Ω时)。 (2)降低输出电压失真度,使THD ≤1%(R S =R L =30Ω时)。 (3)实现相位跟踪功能:当f REF 在给定范围内变化以及加非阻性负载时,
均能保证u F 与u REF 同相,相位偏差的绝对值≤5°。 (4)过流、欠压故障排除后,装置能自动恢复为正常状态。 (5)其他。 三、说明 1.本题中所有交流量除特别说明外均为有效值。 2.U S 采用实验室可调直流稳压电源,不需自制。 3.控制电路允许另加辅助电源,但应尽量减少路数和损耗。 4.DC-AC 变换器效率o d P P η= ,其中o o1o1P U I =?,d d d P U I =?。 5.基本要求(1)、(2)和发挥部分(3)要求从给定或条件发生变化到电路 达到稳态的时间不大于1s 。 6.装置应能连续安全工作足够长时间,测试期间不能出现过热等故障。 7.制作时应合理设置测试点(参考图1),以方便测试。 8.设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、 主要的测试结果。完整的电路原理图、重要的源程序和完整的测试结果用附件给出。
全国大学生电子设计大赛题一等奖数字频率计
2015 年全国大学生电子设计竞赛 全国一等奖作品 设计报告部分错误未修正,软 件部分未添加 竞赛选题:数字频率计(F 题)
摘要 本设计选用FPGA 作为数据处理与系统控制的核心,制作了一款超高精度的数字频率计,其优点在于采用了自动增益控制电路(AGC)和等精度测量法,全部电路使用PCB 制版,进一步减小误差。 AGC 电路可将不同频率、不同幅度的待测信号,放大至基本相同的幅度,且高于后级滞回比较器的窗口电压,有效解决了待测信号输入电压变化大、频率范围广的问题。频率等参数的测量采用闸门时间为1s 的等精度测量法。闸门时间与待测信号同步,避免了对被测信号计数所产生±1 个字的误差,有效提高了系统精度。 经过实测,本设计达到了赛题基本部分和发挥部分的全部指标,并在部分指标上远超赛题发挥部分要求。 关键词:FPGA 自动增益控制等精度测量法
目录
1. 系统方案 1.1. 方案比较与选择 宽带通道放大器 方案一:OPA690 固定增益直接放大。由于待测信号频率范围广,电压范围大,所以选用宽带运算放大器OPA690,5V 双电源供电,对所有待测信号进行较大倍数的固定增益。对于输入的正弦波信号,经过OPA690 的固定增益,小信号得到放大,大信号削顶失真,所以均可达到后级滞回比较器电路的窗口电压。 方案二:基于VCA810 的自动增益控制(AGC)。AGC 电路实时调整高带宽压控运算放大器VCA810 的增益控制电压,通过负反馈使得放大后的信号幅度基本保持恒定。 尽管方案一中的OPA690 是高速放大器,但是单级增益仅能满足本题基本部分的要求,而在放大高频段的小信号时,增益带宽积的限制使得该方案无法达到发挥部分在频率和幅度上的要求。 方案二中采用VCA810 与OPA690 级联放大,并通过外围负反馈电路实现自动增益控制。该方案不仅能够实现稳定可调的输出电压,而且可以解决高频小信号单级放大时的带宽问题。因此,采用基于VCA810 的自动增益控制方案。 正弦波整形电路 方案一:采用分立器件搭建整形电路。由于分立器件电路存在着结构复杂、设计难度大等诸多缺点,因此不采用该方案。 方案二:采用集成比较器运放。常用的电压比较器运放LM339 的响应时间为1300ns,远远无法达到发挥部分100MHz 的频率要求。因此,采用响应时间为4.5ns 的高速比较器运放TLV3501。 主控电路 方案一:采用诸如MSP430、STM32 等传统单片机作为主控芯片。单片机在现实中与FPGA 连接,建立并口通信,完成命令与数据的传输。 方案二:在FPGA 内部利用逻辑单元搭建片内单片机Avalon,在片内将单片机和测量参数的数字电路系统连接,不连接外部接线。 在硬件电路上,用FPGA 片内单片机,除了输入和输出显示等少数电路外,其它大部分电路都可以集成在一片FPGA 芯片中,大大降低了电路的复杂程度、减小了体积、电路工作也更加可靠和稳定,速度也大为提高。且在数据传输上方便、简单,因此主控电路的选择采用方案二。
全国光电设计大赛报告
第四届全国光电设计大赛理论方案报告 编号: 参赛题目:基于光电导航的智能移动测量小车参赛队伍名称: 所在学校: 队员: 指导老师: 提交方案时间:2014-7-12
摘要 本设计是基于STM32F103VET6处理器的具有循迹和计数测量的智能小车。循迹部分,选择了面阵CCD作为赛道图像的的采集,并对图像信息进行二值化处理,便于单片机进行图像处理;根据图像的处理情况,使用PID算法驱动电机和舵机矫正小车当前行驶状况,按照赛道的要求行驶;道路旁树数目的测量用到了激光反射传感器,通过激光打在数目上而反射回来的原理进行数目的测量;对隧道长度的测量用到了光电旋转编码器,把这个编码器加载到驱动轴上,由驱动轴的转动来带动编码器的转动从而测出小测的速度,在再用红外对射传感器来检测隧道的到来和离开,用单片机记录之间的时间,实现隧道长度的测量。 关键词:STM32F103VET6、面阵CCD、光电旋转编码器、红外对射传感器、二值化、PID算法
目录摘要2 第一章系统硬件结构5 1.1系统分析5 1.2系统框图6 第二章硬件电路结构与方案设计6 2.1 电源管理模块6 2.2 图像采集模块7
2.3 电机驱动模块7 2.4 速度检测模块8 2.5 舵机驱动模块8 2.6激光传感器模块9 第三章系统控制策略11 3.1 路径循迹11 3.1.1 采集思路11 3.1.2 路径识别处理12 3.1.3 舵机制动13 3.1.4 电机驱动14 3.2 树木计数14 3.3 测量隧道15 3.4 停车15 参考文献16
第一章系统硬件结构 1.1系统分析 整个系统要实现的功能是循迹和测量。 要实现循迹功能就必须可以让小车检测到不同的路况,再根据不同的路况特征进行调整,实现循迹行驶,循迹用到了面阵CCD,通过CCD的对整个赛道图像进行采集,STM32单片机对图像进行处理,通过PID算法对小车的电机和舵机进行控制。 测量部分,要实现对隧道长度的测量,必须要知道两个量,一个是进出隧道的时间,即时间量,在一个是,通过的速度,知道这两个量,就能确定出隧道的长度,这里我们用到例了红外对射传感器,来感应隧道的到来和离去,以此来记录小车通过隧道的时间,在用编码器来测小车通过的速度,这样就能计算出隧道的长度。 在对道路旁树木的个数进行测量时,考虑到小车快速的从树木旁通过时,要有快速的判断和计数,所以对传感器的要求就很高,我们这里选择了激光传感器,通过激光的反射和接受来确定树木,这样做的好处是: 一、激光有很好的方向性。 二,激光的感应速度很快,敏感度高。 其次是通过单片机的定时计数器来对树木的个数进行计数,最后显示在液晶屏上。 最后就是通车问题,根据比赛要求小车要在指定的位置停下来,就要有一个感应装置对指定位置设置的目标进行探测,并执行停止指令,在这里我们用到了红外反射传感器,对指定目标的进行障碍检测。
第二届全国大学生光电设计竞赛竞赛细则
第二届全国大学生光电设计竞赛竞赛细则 竞赛题目一:基于太阳能的光电导航搬运车 1.竞赛规则: 要求参赛队车辆从卸载区出发,经障碍区到装载区装载后将负载运输至卸载区,以在规定时间内赛车从装载区运送至卸载区的负载总重量计算竞赛得分。参赛队中运送重量最多的队获得竞赛分满分60分,其余队得分按其运送总重量比例递减。即,本队得分=60×本队运送重量/优胜队运送重量。 负载:磅秤用砝码,组委会统一提供足够数量的磅秤用砝码,种类配置为:0.5kg,1kg,2kg各若干。 比赛时间:每次比赛限时6分钟。比赛开始前及结束后赛车的任何部位均应在比赛区域之外。 要求采用光电技术设计赛车的避障导航系统,具体方法由各参赛队自定,并自带前进导航和避障系统到现场参加比赛。 0.2m+10%,可采用任意面积 赛车能源:必须全部来自太阳能,光伏电池面积不大于2 的聚光系统;不能采用蓄电池储能、稳压,比赛前须将电容和电感类放电完毕。 比赛采用淘汰制,具体分组由抽签决定。 赛场布置:重物装载区、卸载区、设置的障碍区及具体尺寸如图1所示。障碍物为标准的红白相间的交通路锥。竞赛场地为标准篮球场的水泥地。图中卸载区和装载区中间两米范围为操作范围。
图1 赛场示意图 注意事项: 1. 障碍物在比赛开始前由裁判在指定范围放置,比赛开始后任何参赛队员不得进入比赛场 地,队员只能在重物卸载区与重物装载区活动,进行重物的装载和卸载; 2. 跑出本赛道取消比赛资格。 3. 不能采用遥控方式。 4. 与小车脱离的导航装置可用外接电源。 5. 路线必须走8字,来回都必须穿越障碍物一次,回程不可重复来时路线(即不能走S 形) 可以走两个菱形代替8字。 6. 车辆抛锚,允许重新开始1次。抛锚前为运送到卸载区砝码不记为总重量??不清楚 2. 评审指标和细则: 1) 理论评审指标: (1) 太阳能汽车如何高效利用太阳能; (2) 太阳能汽车如何实现准确光电导航; (3) 太阳能汽车如何实现载重能力和速度的最优设计。 2) 实物评审细则 (1) 展示分(满分10分) 主要考察:展板设计,导航装置的合理性和性价比,赛车各部分配置的合理性,电池板调整的方便灵巧性等。 (2) 竞赛成绩(满分60分) 按各参赛队的运送总量排序,运送最多的队得满分60分。其他队伍得分 60×= 第一名队伍运送总重量 本队运送总重量 所得分值 (3) 答辩评分(满分30分) 主要考察: l 整体评价(条理清楚、叙述完整、重点突出、时间把握合理) 5 l 对原理的叙述是否正确 3 l 创新性、光电知识的运用、设计特色、性价比、自制程度和工艺等 12 l 回答问题 10 3. 违规判罚 (1)没有按照规则要求正常行驶至终点者不计成绩。
全国大学生光电设计竞赛正式赛题
第三届全国大学生光电设计竞赛正式赛题 2 竞赛题目:激光反射法音频声源定位与语音内容解析 竞赛要求:利用光电检测原理设计并制作一套音频声源定位与监听系统(以下简称“定位与监听系统”),放置于室外,利用激光束反射来检测确定室内声源的位置及声源播放内容。 根据声源定位准确度、播放分贝数和复原播放内容准确度确定各参赛队成绩。 竞赛条件: (1)在一楼教室内放置一个音量可调的扬声器,以任意顺序播放英文字母和阿拉伯数字,一次 播放的字母和数字个数在 20 个以内,一次播放时间在半分钟内。 (2)提供系列不同分贝数、随机播放 20 个以内字母和数字的声源样本供各参赛队选择。 (3)指定该教室的 2 个玻璃窗用于激光束的反射和探测。 (4)扬声器声源在与玻璃窗平面平行的一定范围内,以 0.1米为一个距离单位随机放置。 (5)如附图所示,放置于室内的声源与玻璃窗所在墙面的垂直距离固定(范围:2-4 米);放置于室外的“定位与监听系统”距离玻璃窗所在墙面的垂直距离固定(范围:10-15 米)。 (6)在该教室外,提供 220V 交流电源和高度可调节的三脚架供参赛队安装和使用“定位与监听系统”。三脚架为普通照相机三脚架,最高高度约 1.6-1.7m。 竞赛规则: (1)参赛队利用“定位与监听系统”显示声源偏离两窗中间面的垂直距离 A 及偏离方向(即在中心面的左侧或右侧),同时监听、记录声源播放内容并可实现复原播放。 (2)每个参赛队可以选择 3 种分贝的声源。对于不同声源可分别进行三次定位测量,取其中最好成绩为该分贝的比赛成绩。 (3)针对每个声源的测量准备时间不超过 8 分钟。准备完毕后,每次定位测量时间不超过 3分钟。 (4)声源定位准确度以 0.1 米为一个距离单位,显示精度高时四舍五入。 (5)判胜优先级为:声源定位准确度>声源分贝数>复原播放准确度。声源定位准确度(包括显示的垂直距离 A 及偏离方向)高的胜出;在声源定位准确度相同时,比较使用声源的分贝数,分贝数小的胜出;在声源定位准确度、分贝数均相同时,比较复原播放准确度,复原播放准确度高的胜出。三者均相同时名次相同。名次相同的同校参赛队通过抽签只保留 1 个队的名次,其他队不计名次。
全国电子设计大赛优秀报告
精心整理全国电子设计大赛训练项目 设计报告 题目数控通用直流电源 摘要 一、 1.1 1.2 1.3 1.4 二、 2.1系统总框图 (7) 2.2硬件设计 (7) 2.2.1开关稳压电源模块 (7) 2.2.2单片机控制模块 (8) 2.2.3正、负输出可调稳压电源模块 (9) 2.2.4按键模块 (10) 2.3软件设计 (10) 2.3.1主程序流程 (11) 2.3.2过流保护程序流程 (11) 三、测试、结果及分析 (12)
3.1基本功能 (12) 3.2发挥功能部分 (15) 四、总结 (15) 五、参考文献 (15) 附录一、完整的系统原理图 (16) 附录二、完整的系统PCB图 (17) 0.12V, 一、 设计并制作一个直流可调稳压电源。 二、设计要求 1.基本要求 ①用变压器输出的两组17.5V交流绕组,设计三组稳压电源,其中两组3V-15V可调,另一组固定输出+5V; ②各组输出电流最大:750mA; ③各组效率大于75%,在500mA输出条件下测量,应在DC/DC输入端预留电流测量端; ④为实现程序控制,预留MCU控制接口。 2.发挥部分 ①设置过流保护,保护定值为1.2A; ②用自动扫描代替人工按键,实现输出电压变化;
③扩展输出电压种类(比如三角波、梯形波等); ④可实现双电源同步调节或分别调节。 一、方案论证与比较 通过对题目的任务、要求进行分析,我们将整个设计划分成两个部分:稳压电源部分和数控部分。 1.1稳压电源部分方案比较 方案一:三端稳压电源 根据设计要求,可以采用三端稳压器来实现输出系统所需的三种直流电压:固定+5V和两组可调输出。其中,用7805实现固定5V的输出,LM317实现可调输出(控制输出电压为1.2~37V)。 电路原理图如下: 图1固定5V输出 7805是我们最常用到的稳压芯片了,它的使用方便,用很简单的电路即可以输入一个直流稳压电源,它的输出电压为5v。 图2LM317可调电源模块 在综合考虑LM317的输出电压范围1.25~37V和其最小稳定工作电流不大于5mA的条件下保证R1≤0.83KΩ,R2≤23.74KΩ,就能保证LM317稳压块在空载时能够稳定工作。输出电压:V O =1.25(1+R2/R1),在LM317输出范围为1.25~37V的条件下,R2/R1范围为:0~28.6。 优点:线性电源工作稳定,输出纹波小,且不需做过多调整,使用较为方便,工作安全可靠,适合制作通用型、标称输出的稳压电源。缺点:线性稳压电路的内部功耗大,效率低,散热问题较难解决。 方案二:晶体管串联式直流稳压电路 晶体管串联式直流稳压电路。电路框图如图3所示,该电路中,输出电压UO经取样电路取样后得到取样电压,取样电压与基准电压进行比较得到误差电压,该误差电压对调整管的工作状态进行调整,从而使输出电压发生变化,该变化与由于供电电压UI发生变化引起的输出电压的变化正好相反,从而保证输出电压UO为恒定值(稳压值)。 图3晶体管串联式直流稳压电路方框图 方案三:开关电源 根据设计要求,可选用开关电源来完成设计。LM2596为电路设计核心。 调整管 取样 误差放大 基准电压 辅助电源 UI UO
第二届东北地区大学生光电设计竞赛试题
第二届东北地区大学生光电设计竞赛试题 竞赛题目1:光源与光纤耦合效率及光纤出射光场特性测量 题目背景:光纤作为光能量传输的重要介质,其传输效率及其出射光场分布特性,被作为评判光纤的光传输质量好坏的最至关重要的因素。 竞技重点:目标设计光源与光纤耦合光路,测量光纤出射光场能量分布特性。 竞赛说明:设计一套光学系统用以提高光纤与光源的耦合效率,测量光纤耦合效率及光纤出射光场能量分布特性。 1、设计光学系统,使用调整台调整光源,光学系统,光纤状态,测量光源光强I in,光纤出射光强I out。光纤耦合效率η=I out/I in; 2、测量光纤出射光场能量分布特性,计算出光场能量占光纤出射总能量任意能量占比时的出射角度,能量占比范围95%—70%。 竞赛规则: 1.比赛用光源为半导体激光器,波长635nm,激光器及其调整机构 由组委会统一提供; 2.光学系统所用透镜数量不限,透镜由组委会统一提供; 3.光电探测器,CCD及其固定装置各1套,由组委会统一提供,CCD
接口为USB,输出图像为BMP文件; 4.所有光学器件统一安装在1m长导轨上;导轨由组委会统一提供; 5.比赛用光纤参数:长度1-2m,接头形式FC/PC,光纤及光纤调整 装置由组委会统一提供; 6.输出光场的能量占比由比赛现场随机确定; 7.比赛用电脑自备,禁止加装辅助检测设备,禁止使用远程遥控或 其它方式。 8.光源与光纤耦合效率与光纤出射光场参数测量精度各占权重 50%; R 圆心为能 量质心 图1 光纤出射光场能量分布法及光斑直径示意图
图2 光纤出射光场角度示意图 图3 比赛光学系统示意图 竞赛题目 2:无人驾驶公交车 竞技重点:无人驾驶公交车自动停车,避障与乘客下车 竞赛说明:本次比赛需要完成的任务是无人驾驶公交车自动停靠车站并使乘客下车。公交车载有乘客,首先从指挥站获取需要停靠的车站编号,然后沿着公交车道开始行驶,途中公交车只在指挥站指定的车站停靠,并将指定数量的乘客送下车,在非停靠站公交车直接通过。公交车在行驶过程中,遇到随机障碍物能够避让,遇到信号灯能够在指定区域短暂停车。当公交车到达指定车站后,通过自身的机械结构将指定数量的乘客送下车。 光纤 2R 光纤出射斑直径能量质心 能量占光纤出射总能量 X%时的出射角度
1994年全国大学生电子设计竞赛题目
第一届(1994年)全国大学生电子设计竞赛题目A题简易数控直流电源 一、设计任务 设计出有一定输出电压范围和功能的数控电源。其原理示意图如下: 二、设计要求 1.基本要求 (1)输出电压:范围0~+9.9V,步进0.1V,纹波不大于10mV; (2)输出电流:500mA; (3)输出电压值由数码管显示; (4)由“+”、“-”两键分别控制输出电压步进增减; (5)为实现上述几部件工作,自制一稳压直流电源,输出±15V,+5V。 2.发挥部分 (1)输出电压可预置在0~9.9V之间的任意一个值; (2)用自动扫描代替人工按键,实现输出电压变化(步进0.1V不变); (3)扩展输出电压种类(比如三角波等)。 三、评分意见 项目得分
基本要求 方案设计与论证、理论计算与分析、电路图 30 实际完成情况 50 总结报告 20 发挥部分 完成第一项 5 完成第二项 15 完成第三项 20 B 题 多路数据采集系统 一、设计任务 设计一个八路数据采集系统,系统原理框图如下: 主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集的显示和显示。具体设计任务是: (1)现场模拟信号产生器。 (2)八路数据采集器。 (3)主控器。 二、设计要求 1.基本要求 (1)现场模拟信号产生器:自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz ~2kHz 范围变化,再经频率电压变换后输出相应1~5V 直流电压(200Hz 对应1V ,2kHz 对应5V )。 (2)八路数据采集器:数据采集器第1路输入自制1~5V 直流电压,第2~7路分别输
神戎杯山东大学大学生光电设计竞赛正式赛题
神戎杯山东大学大学生光电设计竞赛正式赛题 竞赛题目1:基于光电导航的智能移动测量小车 竞赛说明:设计一辆具有光电导航功能的智能车,要求从线路的指定点出发,沿轨道上铺设的“8”字形导航条走完全程。在行走过程中,利用光电技术测量、记录沿途所通过的三段隧道各自的长度及沿途路边树木的总棵数。 竞赛规则: 1)智能车平台:横向宽度不大于赛道宽度(0.5m), 高度不高于隧道高度(0.5m)。小 车由参赛队伍自备,无其它特殊设计要求。 2)比赛场地:室内体育场,深绿色防滑塑胶地面,赛场面积:6.4m×4m(以赛道实 物为准,图片仅作参考)。比赛时体育场处于常用照明状态,不会设置额外光源增强特定比赛区域照明亮度。 3)赛道:宽0.5m,整体为“8”字形,颜色和体育场地面颜色一致;沿途随机设置 一定数量硬质薄板制作的隧道和红色中华铅笔代表的树木:(a) 隧道内表面(包括顶部表面)为黑色, 净高0.5m,内表面与赛道内侧等宽。隧道总共有三段,每段长度不一且可调(隧道长度为30cm-60cm)。相邻隧道的边沿沿运行赛道方向的间距不小于20cm。隧道不设置在赛道拐角处。(b) 沿整个赛道的总树木(铅笔)数不超过20棵, 树木和赛道道外边沿的间距不大于5cm,树木之间的间距不小于3cm,树木距离最近的隧道边沿沿赛道方向的间距不小于20cm。树木可在赛道内侧和外侧同时摆放且每侧树木呈单行排列,树木和树木之间的连线不必平行于赛道。(c) 隧道和树木设置在赛场两侧的4m × 2.5m 的矩形区域,不会设置在赛场中间的4m × 1.4m的“x”型区域。(d)赛道中间贴有3cm宽的白色导航胶带(见下图绿色虚线),赛道内外边沿贴有3cm宽的黄色边界标志胶带。
全国大学生电子设计大赛报告
题目名称:开关电源模块并联供电系统(A 题) 摘要 开关电源模块并联供电系统是采用8位Atmega88的开关电源,主电路采用LM2576和LM2596作为两块并联的开关电源。LM2576作为恒压源,LM2596作为恒流源。该两块开关电源保证系统的效率,电流电压调整率和输出精度要求。系统具有限流保护功能,HD7279键盘输入输出等多种功能。该系统主要采用硬件反馈调节,调整能力强,使单片机负载小。 本系统功能完善,在支路在0.5-2A输出范围内,干路电流输出范围使1-4A其分压比由外界输入。由AD采用,读出干路电流,经数字电位器调整恒流源工作状态,使其自调整实现固定分压比,并且电流精度满足在百分之五以内。关机或过流保护收后,具有可以记忆参数、自恢复功能。 Abstract Switching power supply modules in parallel power supply system is the use of 8-bit Atmega88 switching power supply, the main circuit LM2576 and LM2596 as two parallel switching power supply. LM2576 as the voltage source, LM2596 as a constant current source. The two switching power supply to ensure efficiency of the system, current and output voltage regulation accuracy requirements. System has a current limit protection, HD7279 keyboard input and output functions. The system uses hardware feedback regulation, adjust the ability to make a small single-chip load. The system is functional, the branch in the output range of 0.5-2A, distributors current output range 1-4A the partial pressure than by the external input. Used by the AD, to read out the current trunk, the digital potentiometer to adjust the current source working condition, to self-adjust to achieve a fixed partial pressure ratio, and accuracy to meet the current five percent or less. After closing down or over-current protection, with memory parameters can be, since the recovery.
2019 年全国大学生电子设计竞赛综合测评题资料讲解
2019年全国大学生电子设计竞赛综合测评题 综合测评注意事项 (1)综合测评于2019 年8 月19 日8:00 正式开始,8 月19 日15:00 结束。 (2)本科组和高职高专组优秀参赛队共用此题。 (3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。 (4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存,交赛区保管。 多信号发生器 使用题目制定综合测评板上的一片LM324AD(四运放)和一片SN74LS00D(四与非门)芯片设计制作一个多路信号发生器,如下图所示。 设计报告应给出方案设计、详细电路图、参数计算和现场自测数据波形(一律手写),综合测评板编号及3个参赛同学签字需在密封线内,限2页,与综合测评板一同上交。 u o1
U o1————方波 U o2————占空比连续可调窄脉冲 U o3————正弦波 U o4————余弦波 一.约束条件 1.一片SN74L.S0OD四与非门芯片(综合测评板上自带); 2. 一片LM324AD四运算放大器芯片(综合测评板上自带); 3.赛区提供固定电阻、固定电容、可变电阻元件(数量不限、参数不限); 4.赛区提供直流电源。 二.设计任务及指标要求 利用综合测评板和若干电阻、电容元件,设计制作电路产生下列四路信号: 1.频率为19kHz~2IkHz连续可调的方波脉冲信号,幅度不小于3.2V; 2.与方波同频率的正弦波信号,输出电压失真度不大于5%,峰-峰值(Vpp)不小于1V; 3.与方波同频率占空比5%~15%连续可调的窄脉冲信号,幅度不小于3.2V; 4.与正弦波正交的余弦波信号,相位误差不大于5°,输出电压峰-峰值(Vpp)不小于1V。 各路信号输出必须引至测评板的标注位置并均需接1kΩ负载电阻(R L),要求在引线贴上所属输出信号的标签,便于测试。 三.说明 1.综合测评应在模电或数电实验室进行,实验室提供常规仪器仪表和工具; 2. SN74LS00D和LM324AD芯片使用说明书随综合测评板并提供; 3.参赛队应在理论设计基础上进行实验调试,理论设计占一定分值,各部分分数(包括理论设计)分配为:方波占10分、正弦波占8分、窄脉冲占6分、正交的余弦波占6分; 4.不允许在测评板上增加使用IC芯片,如果增加芯片则按0分记; 5.原则上不允许在测评板上增加使用BJT、FET和二极管,如果增加则按3分/只扣分; 6.原则上不允许参赛队更换测评板,如果损坏测评板只可更换一次并扣10分;