自适应噪声消除实验报告
开放型创新实验报告实验项目:自适应噪声消除器
编号:********
实验教师:***
报告人:***
学号:********
一、实验目的
1.了解自适应波器原理及性能分析方法.
⒉掌握LMS算法的基本原理和算法中矩阵的构造方法.
二、实验原理
⒈自适应滤波原理
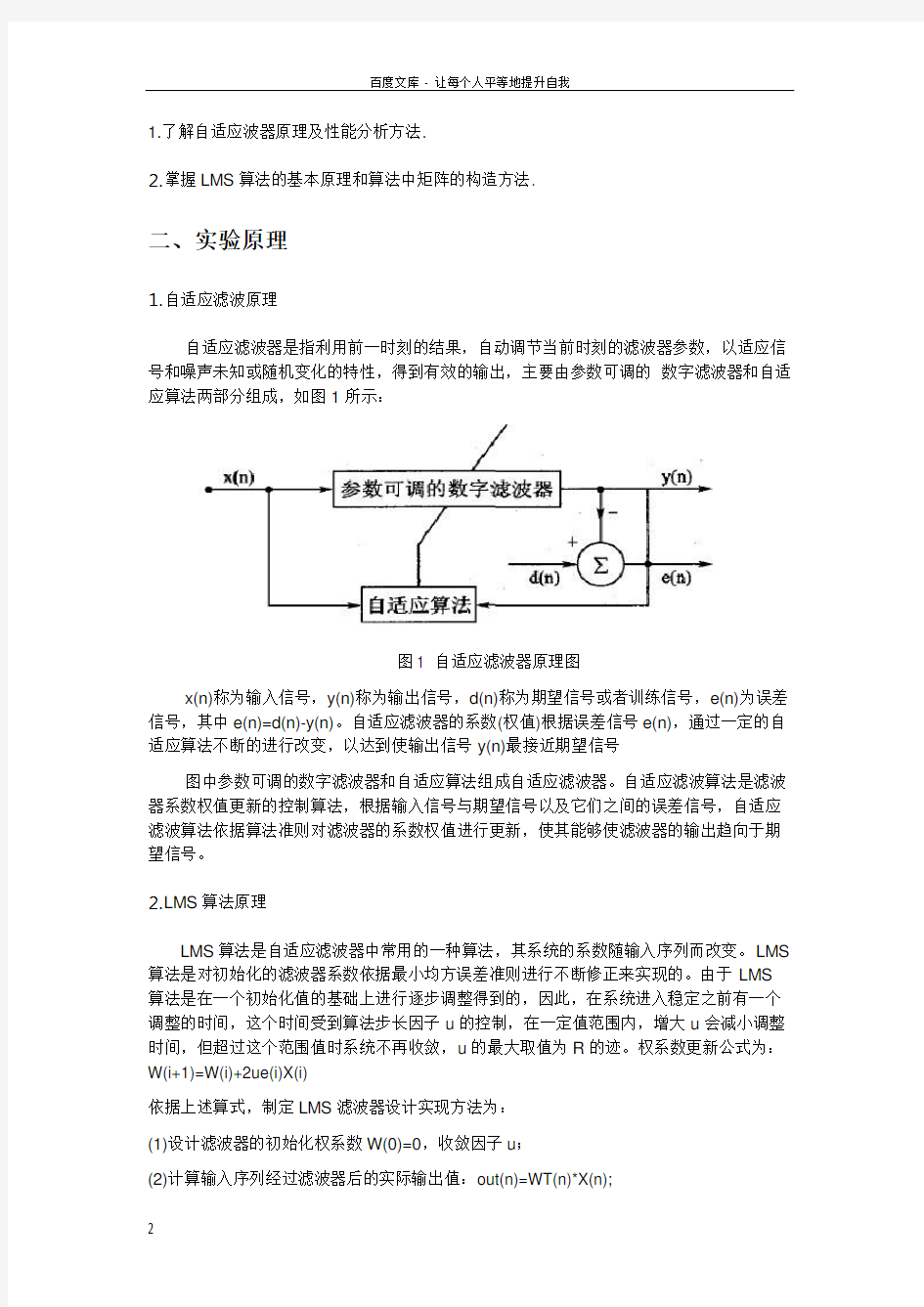
自适应滤波器是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的数字滤波器和自适应算法两部分组成,如图1所示:
图1 自适应滤波器原理图
x(n)称为输入信号,y(n)称为输出信号,d(n)称为期望信号或者训练信号,e(n)为误差信号,其中e(n)=d(n)-y(n)。自适应滤波器的系数(权值)根据误差信号e(n),通过一定的自适应算法不断的进行改变,以达到使输出信号y(n)最接近期望信号
图中参数可调的数字滤波器和自适应算法组成自适应滤波器。自适应滤波算法是滤波器系数权值更新的控制算法,根据输入信号与期望信号以及它们之间的误差信号,自适应滤波算法依据算法准则对滤波器的系数权值进行更新,使其能够使滤波器的输出趋向于期望信号。
⒉LMS算法原理
LMS算法是自适应滤波器中常用的一种算法,其系统的系数随输入序列而改变。LMS 算法是对初始化的滤波器系数依据最小均方误差准则进行不断修正来实现的。由于LMS
算法是在一个初始化值的基础上进行逐步调整得到的,因此,在系统进入稳定之前有一个调整的时间,这个时间受到算法步长因子u的控制,在一定值范围内,增大u会减小调整时间,但超过这个范围值时系统不再收敛,u的最大取值为R的迹。权系数更新公式为:W(i+1)=W(i)+2ue(i)X(i)
依据上述算式,制定LMS滤波器设计实现方法为:
(1)设计滤波器的初始化权系数W(0)=0,收敛因子u;
(2)计算输入序列经过滤波器后的实际输出值:out(n)=WT(n)*X(n);
(3)计算估计误差e(n)=xd(n)-out(n);
(4)计算n+1阶的滤波器系数W(n+1)=W(n+2)*u*e(n)*X(n);
(5)重复(2)—(4)过程;
三、实验仿真
1.实验程序
clear;
g=100; %统计仿真次数为g
N=1024; %输入信号抽样点数
k=32; %滤波器阶数
u=0.0001; %滤波器收敛因子
pp=zeros(g,N-k); %将每次独立循环的误差结果存于矩阵pp中,以便后面对其平均for q=1:g
t=1:N;
a=1;
s=a*sin(0.05*pi*t); %输入单信号s
figure(1);
subplot(311)
plot(s); %信号s时域波形
title('信号s时域波形');
xlabel('n');
axis([0,N,-a-1,a+1]);
xn=awgn(s,5); %加入均值为零的高斯白噪声
%设置初值
y=zeros(1,N); %输出信号y
y(1:k)=xn(1:k); %将输入信号xn的前k个值作为输出y的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=xn((i-k+1):(i));
y(i)=w*XN';
e(i)=s(i)-y(i);
w=w+u*e(i)*XN;
end
pp(q,:)=(e((k+1):N)).^2;
end
subplot(312)
plot(xn); %信号s时域波形
title('信号s加噪声后的时域波形');
subplot(313)
plot(y); %信号s时域波形
title('自适应滤波后的输出时域波形');
for b=1:N-k
bi(b)=sum(pp(:,b))/g; %求误差统计平均end
figure(2); %算法收敛曲线
t=1:N-k;
plot(t,bi,'r');
title('收敛曲线');
hold on %将每次循环的图形显示结果保存下来
⒉实验分析
(1)收敛因子对LMS算法自适应滤波的影响
图1 阶数为128,收敛因子为0.1的滤波效果
图2 阶数为128,收敛因子为0.1的收敛效果
图3 阶数为128,收敛因子为0.01的滤波效果
图4 阶数为128,收敛因子为0.01的收敛效果
图5 阶数为128,收敛因子为0.001的滤波效果
图6 阶数为128,收敛因子为0.001的收敛效果
图7 阶数为128,收敛因子为0.0001的滤波效果
图8 阶数为128,收敛因子为0.0001的收敛效果
实验结果分析:u=0.0001时,图8中误差信号的收敛速度很慢,在整个输入讯列中都未完成调整,因此输出序列的开始部分有一个很长的调整时间。u=0.001时图6中的效果得到了明显的改进,误差信号得到迅速的收敛,但输出信号却不如u=0.0001的平滑。当u=0. 1时,系统无法实现收敛,u的最大取值不能超过矩阵R的迹。
(2)滤波器阶数对LMS算法自适应滤波的影响
图9 阶数为256收敛因子为0.0001的滤波效果
图10 阶数为128收敛因子为0.0001的滤波效果
图11 阶数为64收敛因子为0.0001的滤波效果
图12 阶数为32收敛因子为0.0001的滤波效果
实验结果分析:N=32时相对N=64的滤波效果要差,其信号中所含杂波成分较大,随着滤波器阶数的提高,滤波器效果会得到改善。但当N=256时,滤波效果反而不如
N=128时效果好,所以对信号来说要选择合适的阶数进行滤波。
关于噪音实验报告模板.doc
关于噪音实验报告模板 篇一:建筑物理环境噪声测量实验报告 课程名称: 学生学号: 所属院部: (理工类) 专业班级: 学生姓名: 指导教师: 20xx——20xx学年第x学期 xx学院教务处制 实验项目名称:环境噪声测量实验实验学时: 4 同组学生姓名:实验地点: 实验日期:实验成绩:批改教师:批改时间: 一、实验目的和要求 (1)掌握噪声测量的方法,对噪声的大小有一个主观的认识 (2)学会使用声级计; (3)分析噪声的大小与来源,得知建筑是否符合规定。 二、实验仪器和设备 HS5633型声级计 三、实验过程
(1)测点的选择:建筑物外1m处,高1.2m; (2)检查声级计的电池电力并采用校准器对其进行校准; (3)测量应在无风雪、无雷电天气,风速5m/s以下进行。大风时应停止测量; (4)记录声级计读数值,保持声级计在L档,每隔5秒读一个数值,共记录200个数。 四、实验结果与分析 原理:将记录的200个数从大到小的顺序排列,第20个数值就是L10,L10反映交通噪声的峰值;第100个数值就是L50,第180个数值就是L90,L90反映背景噪声值。等效声级反映了在测量的时间内声能的平均分布情况。计算公式:Leq=L50+d/60其中d=L10-L90 测量得出数据(单位:db): 依据测量的的数据得出: L10(在10%时最大噪音峰值)=58.9db L50(在200个数据中最大平均值)=52.4 db L90(背景噪声)=47.5 Leq(等效声级)=52.59 (Leq=L50+d/60d=L10-L90) 分析:对照《城市区域环境噪声标准》的校园1类的昼间等效声级 Leq<=55db,所以符合标准。 篇二:噪声测量实验报告 一、前言 随着城市人口的增长,城市建设、交通工具、现代化工业的发展,各种机器设备和交通工具数量急剧增加,以工业和交通
毕业论文--自适应噪声对消在语音信号处理中的应用研究
本科生毕业论文 (设计) 中文题目自适应噪声对消在语音信号处理中的应用研究 英文题目
摘要 在实际生活中,任何语音信号都不可避免的受到噪声信号的影响,如何有效的抑制和去除噪声,提高语音的可懂度是近年来的热门研究课题,文中介绍了自适应滤波器的基本原理,结构和应用,应用matlab软件,对自适应算法在噪声对消中的应用进行了仿真研究,并完成了语音信号噪声消除实例。 本文对自适应滤波算法在语音信号去噪方面进行了研究,对自适应对消系统进行了深入的学习与研究,在固定步长的基础上,建立了步长因子u与信噪比及噪声幅度之间的一种非线性函数关系,使步长随误差信号e(n)的变化而变化,从而提高了收敛速度,能够有效的滤除实际生活中语音信号中的高斯白噪声,工频干扰,以及其他讲话者的干扰,大幅度提高输出语音信号的信噪比,有效的提高语音的可懂度。通过实验证明,该算法在收敛速度,消噪性能,信噪比提高方面与常规的自适应算法相比均有一定的提高。 关键词:自适应滤波变步长LMS算法语音降噪
Adaptive noise cancellation in speech signal processing research Abstract: In our daily life ,all speech signal will be influenced by noise, How to effectively eliminate the noise is one of hot subjects for years.The paper begins with the principle of adaptive filter,structure and application. Based on the MATLAB platform, simulation is carried out for the applications of adaptive algorithms in noise cancelling,and completed the instance of voice signal noise reduction. This paper discuss about adaptive filtering algorithm in the speech signal denoising aspects of the research on the adaptive cancellation system in-depth study and research and establishes another step factor u and the error signal e (n) between the non-linear function of a new relationship, the algorithm using variable step size, the step with the magnitude of the noise signal to noise ratio and the change, to improve the convergence rate, can effectively filter out in real life speech signal Gaussian white noise, frequency interference, and interference with other speakers. Can greatly enhance the output speech signal to noise ratio, experiments show that the algorithm convergence rate, noise reduction performance, improving signal to noise ratio with the conventional adaptive algorithms have improved to some extent compared. In this paper, the coefficient of the formula
介绍了噪声抵消的原理和从强噪声背景中自适应滤波提取有用信号的
LMS与RLS自适应滤波算法性能比较 马文民 【摘要】:介绍了自适应滤波器去除噪声的原理和从强噪声背景中采用自适应滤波提取有用信号的方法,并对最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法进行了算法原理、算法性能分析。计算机模拟仿真结果表明,这两种算法都能通过有效抑制各种干扰来提高强噪声背景中的信号。检测特性相比之下,RLS 算法具有良好的收敛性能,除收敛速度快于LMS算法和NLMS算法以及稳定性强外,而且具有更高的起始收敛速率、更小的权噪声和更大的抑噪能力。 【关键词】:自适应滤波;原理;算法;仿真 引言: 自适应滤波是近30年以来发展起来的一种最佳滤波方法。它是在维纳滤波,kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。自适应滤波的研究对象是具有不确定的系统或信息过程。"不确定"是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是我们事先不知道的。作为外部环境对信息过程的影响,可以等效地用扰动来表示,这些扰动通常是不可测的,它们可能是确定的,也可能是随机的。此外一些测量噪音也是以不同的途径影响信息过程。这些扰动和噪声的统计特性常常是未知的。面对这些客观存在的各种不确定性,如何综合处理信息过程,并使某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。 在这几十年里,数字信号处理技术取得了飞速发展,特别是自适应信号处理技术以其计算简单、收敛速度快等许多优点而广泛被使用。它通过使内部参数的最优化来自动改变其特性。自适应滤波算法在统计信号处理的许多应用中都是非常重要的。 在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。例如在超声波无损检测领域,因传输介质的不均匀等因素导致有用信号与高噪声信号迭加在一起。被埋藏在强背景噪声中的有用信号通常微弱而不稳定,而背景噪声往往又是非平稳的和随时间变化的,此时很难用传统方法来解决噪声背景中的信号提取问题。自适应噪声抵消技术是一种有效降噪的方法,当系统能提供良好的参考信号时,可获得很好的提取效果。与传统的平均迭加方法相比采用自适应平均处理方法还能降低样本数量。 1自适应滤波器的基本原理 所谓的自适应滤波,就是利用前一时刻以获得的滤波器参数的结果,自动的调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。自适应滤波器实质上就是一种能调节其自身传输特性以达到最优的维纳滤波器。自适应滤波器不需要关于输入信号的先验知识,计算量小,特别适用于实时处理。 由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用FIR和IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器的特性变化是由自适应算法通过调整滤波器系数来实现的。一般而言,自适应滤波器由两部分组成,一是滤波器结构,二是调整滤波器系数的自适应算法。 自适应噪声抵消系统的核心是自适应滤波器,自适应算法对其参数进行控制,以实现最佳滤波。不同的自适应滤波器算法,具有不同的收敛速度、稳态失调和算法复杂度。根据自
噪声实验报告范文.doc
噪声实验报告范文 一、噪声的来源 噪声的种类很多,因其产生的条件不同而异。地球上的噪声主要来源于自然界的噪声和人为活动产生的噪声。自然界形成的这些噪声是不以人们的意志为转移,因此,人们是无法克服的。我们所研究的噪声主要是指人为活动所产生的噪声,它的来源分为以下几种情况。 ⑴交通噪声 在我国,道路交通噪声在城市中占的比重通常为40%以上,有的甚至在75%以上,随着城市车辆的拥有量不断增加,道路交通噪声的危害也将不断加剧。系由各种交通运输工具产生的振动声、喇叭声、汽笛声、刹车声、排气声、防盗报警鸣笛声、穿越而过的铁路(包括地上、地下)和飞机起落时的噪声等。⑵工业噪声系由工业生产活动中的机械设备和动力装置产生的噪声。 工业噪声在我国城市环境噪声中所占的比重约为20%左右,在我国城市中,居民与厂矿的混杂情况甚多,厂矿噪声的强度大,作用时间长,使得居民对厂矿声的反应特别强烈。 ⑶建筑施工噪声 建筑工地地打桩声能传到数公里以外,且工期大都在一年以上,因而对周围居民地干扰是很大的。 ⑷社会生活噪声
泛指人们因生活(商业文化、娱乐等)活动所产生的噪声。 二、噪声的危害 噪声污染已成为城市四大公害之一,其危害主要表现在一下及格方面:⑴干扰和损害听力。 噪声污染可引起耳鸣耳痛、听力损伤等听力损害。另外,噪声会干扰听力,掩鼻需要的声音,使人不易察觉一些危险的信号,从而容易造成重大事故。⑵引起心血管系统、内分泌系统、消化系统、呼吸系统等方面的疾病。⑶对心理、睡眠、神经系统、工作和生活产生影响。噪声会使人心烦意乱、负面情绪增加;使感知判断能力、智力思维、瞬时记忆、视听反应速度和验收协 调能力下降。人长时间在噪声刺激下就会患“神经衰弱症”。 ⑷对妇女、孕妇、胎儿、儿童产生影响。长期强噪声会导致女性月经不调、性机能紊乱;在噪声环境下生活的儿童,智力发育水平要比安静条件下的儿童低20%。 ⑸对视觉的影响。长时间处于噪声环境中,很容易发生眼疲劳、眼痛、眼花和流泪等,同时还会使色觉、视野发生异常。 ⑹其他影响。强噪声刺激影响动植物的生长发育,使生物间的信息联系破坏;使建筑物坍塌,一起设备失灵和毁坏等。 三、主要仪器 AWA5633数字式声级计、普通声级计(II型:HS5633)、Hs5920 噪声监测仪,。 四、实验注意事项
DSP实现噪声消除
Adaptive noise cancellation is used to remove background noise from useful signals.This is an extremely useful technique where a signal is submerged in a very noisy environment.DSP is a kind of high speed and performance professional digital signal https://www.360docs.net/doc/94967466.html,ing DSP in ad aptive noise cancellation system,real-time control and high precision ca n be achieved.In this paper,an adaptive noise cancellation system base d on DSP is designed,and noise in the signals is decreased efficiently. Keyword:adaptive;noise cancellation;DSP;LMS;RLS 摘要:自适应噪声消除技术在信号处于噪声很强的环境中时,可以非常有效地将噪声去除掉。而DSP是一种高速、高性能的专业数字信号处理器,用DSP实现自适应噪声消除,其具有很好的实时性和处理精度。在此完成了基于DSP的自适应噪声消除系统,有效地消除了信号中的噪声。 关键词:自适应;噪声消除;DSP;LMS;RLS DSP(Digital Signal Processor,数字信号处理器)是在模拟信号变换成数字信号以后进行高速实时处理的专用处理器件,DSP具有接口简单、方便;精度高、运算速度快、稳定性好;编程方便,容易实现复杂的算法;集成方便等优点,已经被广泛的应用于通信、雷达、语音、图像、消费类电子产品等领域。DSP技术的发展和应用,使得自适应信号处理技术得以实现。自适应噪声消除是消除强背景噪声的一种有效的技术,在通常情况下,背景噪声不是稳定不变的,而是随着时间的变化而变化。因此,噪声消除应该是一个自适应噪声处理过程:既可以在时变的噪声环境下工作,还可以根据环境的改变而调整自身的工作参数。在本文中,利用DSP的优越性能,在TI公司TMS320VC5416芯片
LMS算法在噪声抵消中的应用
LMS算法在噪声抵消中的应用 冯振勇,王玉良 北京邮电大学信息工程学院,北京(100876) E-mail:fengzhenyong1984@https://www.360docs.net/doc/94967466.html, 摘要:自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。本文首先根据自适应LMS滤波器的设计理念介绍了噪声抵消器的原理,得出自适应抵消器只有参考输入噪声与原始输入噪声存在相关性,才能有效的抵消噪声的结论;在此基础上进行了稳定噪声抵消的求解,以单输入单输出维纳滤波器系统为例,通过滤波器的误差公式和转移函数求得维纳滤波器问题的无约束非因果解;随后利用LMS算法设计了自适应单信道噪声抵消器,根据前两步的分析,将自适应抵消器的参考输入信号谱函数分解,求得维纳解的最佳转移函数;最后通过MATLAB仿真实验证明了LMS算法在自适应滤波去噪中的优势,并对结果进行了分析。 关键词:LMS算法;自适应单信道噪声抵消器;自适应滤波 中图分类号:TN713 1. 引言 自适应噪声抵消器是利用自适应噪声抵消技术,从背景噪声中提取语音信号,以提高语音的清晰度。其目的是把信号中的噪声和语音信号进行有效地分离,降低环境噪声的影响。 自适应干扰对消是通过自适应过程加以控制的,它可以在信号很微弱或信号用常规的方法无法检测的噪声干扰场中,将从一个或多个传感器所取得的参考输入加以过滤,并从包含信号和噪声的原始输入中减去,最后结果是原始信号中的噪声或干扰被衰减或消除,而保留了有用信号[1]。噪声干扰对消可完成时间域(频域)的滤波,也可实现空间域的滤波,因此自适应干扰对消具有广泛的应用范围。例如消除心电图中的电源干扰、检测胎儿心音时滤除母亲的心音及背景干扰、在有多人讲话的场合下提取某人的讲话、作为天线阵列的自适应旁瓣对消器。 2. 自适应噪声抵消器的设计 理论上讲,自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。简单的说,把 d n改为信号加噪声干扰的原始输入端,而它的输入端改自适应滤波器的期望信号输入端() 为噪声干扰端,有横向滤波器的参数调节输出以将原始输入端的噪声抵消掉,这时误差输出就是有用信号了。下面从噪声抵消器的原理介绍,求解过程和设计三方面进行说明。 2.1 噪声抵消器的原理 图1 噪声低消器的原理图
噪声测定实验教案
噪声测定实验 一实验目的 1掌握AWA5610C声级计的工作原理及其使用方法 2掌握AWA6270A噪声频谱分析仪的工作原理及其使用方法 二实验内容 1使用AWA5610C声级计测量噪音 2使用AWA6270A噪声频谱分析仪测量噪音 三实验原理 1 AWA5610C声级计的工作原理 工作原理是被测的声压信号通过传声器转换成电压信号,然后经衰减器、放大器以及相应的计权网络、滤波器,或者输入记录仪器,或者经过均方根值检波器直接推动以分贝标定 的指示表头。 2 AWA6270A噪声频谱分析仪的工作原理 工作原理是输入信号经衰减器直接外加到混波器,可调变的本地振荡器经与CRT同步的扫瞄产生器产生随时间作线性变化的振荡频率,经混波器与输入信号混波降频后的中频信号(IF)再放大,滤波与检波传送到CRT的垂直方向板。 四实验设备仪器 (一)AWA5610C声级计 AWA5610C型积分声级计是一种袖珍式智能化噪声测量仪 器,可广泛应用于环境噪声的测量与自动监测,也可用于劳动保 护、工业卫生及各种机器、车辆、船舶、电器等工业噪声测量。 本仪器采用了先进的数字检波技术,具有可靠性高、稳定性好、 动态范围宽等优点。 主要技术性能: 驻极体测试电容传声器,灵敏度: 1.传声器:Φ1 2.7mm(1/2”) 约40mV/Pa,频率范围:20Hz~12.5kHz。 2.测量范围:35~130dBA(以2×10-5Pa为参考,下同) 3.频率范围:20Hz~12.5kHz 4.频率计权:A计权 5.时间计权:快(F),慢(S) 图1 AWA5610C声级计 6.检波器特性:真有效值、峰值因数 3 7.准确度:2型 8.测量时间:手控、10s、1min、5min、10min、20min、1h、4h、8h、24h。 9.显示:4位LCD,直接显示测量结果Lp、Leq、Lmax、Lmin、Linst、Tm及日历年、月、日、时、分、秒等。 10.储存:60组数据,包括年、月、日、时、分、设定时间、测量经历时间、最大声级, 最小声级、等效声级。 11.输出接口:RS—232C,可接至微型打印机或计算机。
道路噪声环境监测实验报告.doc
道 路 噪 声 监 测 班级:城规x5班 小组:第一小组 小组成员:李国强、苗茗凯、王莉、郝璐、万利、任慧、张素毓、任安平、 王璐玭、张平、牛凯、薛飞
道路噪声环境监测 噪声就是人们生活工作所不需要的声音。从物理现象判断。一切无规律的或声信号叫噪声,或人们主观上一切不希望存在的干扰声都叫噪声。环境噪声监测是环境监测的一个重要组成部分,是为环境保护事业服务、为创造清洁、优美、安静环境的一项基础性工作。 一、实验目的 1.掌握声级计的使用方法和环境噪声的监测技术; 2.熟悉对非稳定噪声监测数据的处理方法; 3.对道路噪声源及周边环境进行监测。 二、监测条件 1.天气条件选在无雨、无雪,风力小于四级(5.5m/s)的时间,声级计应保持传声器膜片清洁,风力在三级以上必须加风罩(以避免风噪声干扰),五级以上大风应停止测量。 2.测量仪器为普通声级计,了解如何使用仪器。 3.手持仪器测量,传声器要求距离地面1.2m。 三、监测项目 兴安南路,大学路至乌兰察布路段内车流量及噪声监测。 四、实验步骤
1.小组成员分工到各点测量。测量时间定为早上 8:00~8:30、9:00~9:00。 2.测量时,传声器水平设置,于道路边沿20厘米处,高约1.2m 左右,垂直指向道路。监测时,三人一小个组,一位同学负责固定仪器,一位同学计时,一位同学记录读数。 3.每个测点位在三个时间段各测 200个数据,读数方式使用慢档,每隔五秒读一个瞬时A声级,连续读取200个数据,求取各测点等效连续声级。测量时记录过往车流量、附近主要噪声来源(如交通噪声、施工噪声、工厂或车间噪声、锅炉噪声等)、天气条件及测量时间、点位位置和测量人姓名。 五、数据记录与处理 由于环境噪声是随时间无规则变化的,因此测量结果一般用统计值或等效声级来表示。因数据符合正态分布,可用近似公式:等效连续声级:L eq=d2/60+L50 ,d=L10-L90 噪声污染级:L NP=L eq+d
自适应噪声抵消器的MATLAB设计与实现概要
福建电脑 2010年第 9期 自适应噪声抵消器的 MATLAB 设计与实现 成利香 1,2, 张桂新 1 (1. 中南大学信息科学与工程学院湖南长沙 4100002. 湖南工学院湖南衡阳421002 【摘要】:本文简述了自适应滤波的基本原理 , 并给出了自适应滤波噪声抵消的一般系统模型 , 重点研究了 LMS 自适应算法。完成了在 MATALB 下的仿真 , 并通过设置不同参数 , 对其性能做了分析。【关键词】:自适应滤波 ; 噪声抵消 ; LMS 算法 ; MATLAB 0、引言 自适应滤波自适应滤波器不需要输入信号的先验知识 , 它是利用前一时刻已经获得的输入信号获参量 , 调节现时刻的滤波参数 , 以适应信号和噪声未知的或随时间变化的统计特性 , 从而实现最优维纳滤波。自适应滤波自 Widrow 等提出以来 , 因其计算量小 , 易于实现等特点 , 得到了各领域的广泛应用。 1、自适应滤波器噪声抵消的原理 1. 1自适应滤波器噪声抵消的基本原理 一个自适应滤波器包括两个不同的部分 :一个是具有可调系数的数字滤波器 , 一个是用于调整或改变滤波系数的自适应算法。图 1给出了自适应滤波器作为噪声对消的原理框图。 图 1自适应滤波器作为噪声对消的原理框图 噪声消除的主要目的是对被污染信号中的噪声的最优估计 , 以获得信号的最优估计。其中 x(n表示输入信号 ; y(n表示被污染的信号 , 包括所希望的信号和噪声
信号 ; r(n表示被污染信号的某种测量 , 与叠加的噪声信号相关 ; d (n:表示叠加噪声信号的估计值 ; e(n; 表示作为输出的信号 , 一是作为希望信号 x(n的估计输出值 , 二是用于调整自适应滤波器的参数。利用此输出值通过某种自适应算法对滤波器参数进行调整 , 最终获得噪声最优估计值 , 当输入信号的统计特性发生变化 , 自适应数字滤波器能够跟踪这种变化 , 自动调整参数 , 使滤波器性能重新达到最佳。 1.2自适应算法的研究 根据自适应算法优化准则的不同 , 其算法大致分为两大类 , 一是最小均方算法 (LMS , least -mean -square , 二是递归最小二乘法 (RLS 。 LMS 算法是基于最小均方误差准则的维纳滤波器和最陡下降法提出的 , 是对梯度下降算法的近似简化。算法的基本思想是 :调整滤波器自身的参数 , 使滤波器的输出信号与期望输 出信号之间的均方误差最小 , 系统输出为有用信号的最佳估计。其算法推导如下 : 其中μ为固定步长因子 , 是一常数。 显然上面的算法不需要事先知道信号的统计量 (即相关量 R 和 P , 而使用他们的瞬时估计代替算法获得的权重只是一个估计值 , 但随着调节权重 , 这些估计值逐渐提高 , 滤波器也越来越适应信号特性 , 最终权值收敛 , 收敛的条件为 其中λmax 是输入数据方差矩阵的最大特征值。下面给出基本 LMS 算法实 现的步骤 : 1 初始化 , 令所有权重为任一固定值 , 或为 0; 2 计算滤波输出 3 计算估计误差 4 更新下一时刻的滤波器的权重 3、自适应噪声抵消器的 MATLAB 的设计与实现 max
噪声测量实验报告
噪声测量实验报告 学院: 专业班级: 组长: 组员: 组员: 组员: 实施时间:
噪声测量实验 ——周围环境与声学现象对人体主、客观评价室内声环境的影响 时间:2014.06.15 10:00—11:30 地点:湖南大学德智学生公寓5-6栋 一、前言 随着城市人口的增长,城市建设、交通工具、现代化工业的发展,各种机器设备和交通工具数量急剧增加,以工业和交通噪声为主的噪声污染日趋严重,甚至形成了公害,它严重破坏了人们生活的安宁,危害人们的身心健康,影响人们的正常工作与生活。 众所周知,高校的宿舍是大学生在校内学习和生活的环境,良好的环境可促进学生的生长发育,增进健康,使学生有充沛的精力学习和研究。然而近年来,随着我国经济的高速发展,各地区院校的发展进程也不断加快,与此同时,也导致越来越多的校园噪声,声级也越来越高。 二、实验目的与原理 噪声级为30~40分贝是比较安静的正常环境;超过50分贝就会影响睡眠和休息。由于休息不足,疲劳不能消除,正常生理功能会受到一定的影响;70分贝以上干扰谈话,造成心烦意乱,精神不集中,影响工作效率,甚至发生事故;长期工作或生活在90分贝以上的噪声环境,会严重影响听力和导致其他疾病的发生。 学生公寓是学生在校园的一个家,是学生平时休息的场所,所以需要一个较为安静的环境,但是,同学们常常会抱怨宿舍不够安静,外界太吵闹,墙体隔音效果不好等等。为了降低宿舍内噪声,减少噪声的干扰和危害,保证同学们良好的学习和生活环境,充分了解宿舍的噪声污染情况是非常有必要的,为此,我们小组选择了湖南大学德智公寓进行了噪声测量实验,明确其中的噪声污染源,从而提出适当的措施,以便减少噪声。通过噪声测量,能让我们良好地掌握噪声计的使用方法和测量环境噪声技术。
专利-一种自适应声反馈消除方法
一种自适应声反馈消除方法 CN 103475980 A 摘要 本发明公开了一种自适应声反馈消除方法,旨在提供一种具有较高增益和良好鲁棒性的声反馈消除方法,其具体步骤为:一、主麦克风拾取音频信号d(n),d(n)包含远端语音信号和近端声反馈信号成份,参考麦克风拾取声反馈信号x(n);二、对d(n)和x(n)采用自适应消除算法,输出为 e(n);三、对e(n)进行数模转换和功率放大;四、通过扬声器输出音频信号。此方案可以准确消除环境噪音、防止产生嚣叫,增益高,处理速度快,适用于教室、会场等扩声环境。 权利要求(6) 1.一种自适应声反馈消除方法,其特征在于,包括以下步骤: 一、主麦克风拾取音频信号d(n),d(n)包含远端语音信号和近端声反馈信号成份,参考麦克风拾取声反馈信号X (n); 二、对d(n)和x(n)采用自适应消除算法,输出为e(n),具体为: h(n) = {h[0],h[l]....,h[N-l]} ,当h(n)的频率特性逼近外H(z)=F''(z)/F'(z)时,即可消除声反馈信号;采用PNLMS算法估计实际的参考检测声反馈路径H(z),递推算法如 下: 上述公式中,μ为步长因子,α为正整数,ρ是影响整体收敛速度的参数;h(n)指回声路径估计FIR滤波器的单位脉冲响应;Ν指回声路径FIR滤波器的阶次;Τ为转置符号;f(n)指回声估计输出;hg(n)指回声路径估计FIR滤波器的第k个估计系数;三、对e(n)进行数模转换和功率放大;四、通过扬声器输出音频信号。 2.根据权利要求1所述的一种自适应声反馈消除方法,其特征在于,步骤二的e(n)经过延时模块后再输出到数模转换。 3.根据权利要求1或2所述的一种自适应声反馈消除方法,其特征在于,参考麦克风和主麦克风拾取到声反馈音频信号的强度之差需控制在3db之内;参考麦克风和主麦克风拾取到语音音频信号的强度之差需大于20db以上。 4.根据权利要求1或2所述的一种自适应声反馈消除方法,其特征在于,处理窗滑动间隔等于6个采样点,每6个采样点完成一次自适应算法运算。 5.根据权利要求4所述的一种自适应声反馈消除方法,其特征在于,AD转换器的采样频率为 48khz,分辨率不小于20bit。 6.根据权利要求5所述的一种自适应声反馈消除方法,其特征在于,FIR滤波器阶次不小于128。说明 一种自适应声反馈消除方法 技术领域
环境监测噪声实验报告(用)
校园环境噪声监测 一、目的要求 (1)掌握环境噪声的监测方法; (2)熟悉声级计的使用; (3)掌握对非稳态的无规则噪声监测数据的处理方法; 二、仪器设备:声级计(GM 1357)、GPS定位器 三、测量点位:6 经纬度:N:33°38.236′ E:117°04.243′ 四、测量条件 (1)天气条件要求在无雨无雪的时间,声级计应保持传声器膜片清洁,风力在三级以上必须加风罩(以避免风噪声干扰),四级以上大风应停止测量。 (2)使用仪器是声级计。 (3)手持仪器测量,传声器要求距离地面1.2m。 五、测定步骤 (1)将学校划分4×5的网格,共20个测点。测量点选在每个网格的交点,若交点位置不宜测量,可移到旁边能够测量的位置。 (2)每组3人配置一台声级计,每2组共用一台GPS定位器。 (3)读数方式用快档,每隔10秒读一个瞬时A声级,连续读取200个数据。读数同时要判断和记录附近主要噪声来源(如交通噪声、施工噪声、工厂或车间噪声、锅炉噪声…)和天气条件。 六、数据处理 环境噪声是随时间而起伏的无规律噪声,因此测量结果一般用统计值或等效声级来表示,本实验用等效声级表示。 (1)将各测点每一次的测量数据(200个)顺序排列找出L10、L50、L90,求出各测点等效声级Leq。 ①②③④⑤⑥⑦⑧⑨⑩ 88.5 71.5 69.6 67.5 66 64.6 63.1 62.1 60.5 58.2 88.4 71.5 69.5 67.5 65.9 64.6 63 62 60.5 57.7
80.4 71.4 69.4 67.3 65.9 64.5 62.9 62 60.5 57.6 76.7 71.1 69.4 67.1 65.8 64.4 62.9 61.7 60 57.3 76.7 71.1 69.3 67.1 65.8 64.3 62.8 61.6 60 57 76.5 71.1 69.1 67.1 65.8 64.3 62.8 61.5 60 56.6 76 71 69 67 65.5 64.1 62.8 61.4 59.8 56.6 75.1 70.9 69 67 65.5 64 62.7 61.4 59.8 56.6 74 70.8 68.9 67 65.5 64 62.7 61.2 59.6 56.5 73.9 70.7 68.9 66.8 65.5 63.8 62.7 61.2 59.5 56.4 73.7 70.6 68.8 66.7 65.5 63.7 62.7 61.2 59.4 56 73.5 70.5 68.8 66.7 65.4 63.7 62.5 61.2 59.1 55.9 73.4 70.5 68.6 66.7 65.3 63.6 62.3 61.1 58.9 55.9 72.6 70.4 68.3 66.6 65.2 63.6 62.3 61.1 58.8 55.8 72.5 70.4 68.3 66.5 65 63.5 62.2 61 58.6 55.8 72.4 70.3 67.9 66.4 64.9 63.4 62.2 61 58.6 55.2 72.2 70.3 67.9 66.4 64.9 63.4 62.1 60.9 58.6 54.8 72.1 69.8 67.7 66.3 64.9 63.3 62.1 60.8 58.5 53.6 71.7 69.7 67.5 66.2 64.8 63.3 62.1 60.8 58.3 52.1 71.5 69.6 67.5 66.1 64.6 63.2 62.1 60.8 58.3 52.1 (2)结果计算 如:1号点位,根据数据,算得等效连续A声级用Leq1表示。
自适应噪声抵消LMS算法Matlab仿真
自适应噪声抵消LMS 算法Matlab 仿真 传统的宽带信号中抑制正弦干扰的方法是采用陷波器(notch filter),为此我们需要精确知道干扰正弦的频率.然而当干扰正弦频率是缓慢变化时,且选频率特性要求十分尖锐时,则最好采用自适应噪声抵消的方法.下图是用一个二阶FIR 的LMS 自适应滤波器消除正弦干扰的一个方案。 1) 借助MATLAB 画出误差性能曲面和误差性能曲面的等值曲线; 2) 写出最陡下降法, LMS 算法的计算公式(δ=0.4); 3) 用MATLAB 产生方差为0.05,均值为0白噪音S(n),并画出其中一次实现的波形据2)中的公式,并利用3)中产生的S(n),在1)中的误差性能曲面的等值曲n 的值曲线上叠加画出LMS 法时100情况确定,一般选取足够大以使算法达到基) (n y 宽带信号+正弦干扰 0()()() y n S n N n =+图; 4) 根线上叠加画出采用最陡下降法, LMS 法时H(n)的在叠代过程中的轨迹曲线。 5)用MATLAB 计算并画出LMS 法时 随时间变化曲线(对 应S(n)的某一次的一次实现)和e(n)波形;某一次实现的结果并不能从统计的角度反映实验的结果的正确性,为得到具有统计特性的实验结果,可用足够多次的实验结果的平均值作为实验的结果。用MATLAB 计算并画出LMS 法时J(n)的100次实验结果的平均值随时间n 的变化曲线。 6)用MATLAB 计算并在1)中的误差性能曲面的等次实验中的H(n)的平均值的轨迹曲线; (在实验中n=1,,…..N,N 的取值根据实验本收敛) 01(),(0)0.05 2()sin( 16102()sin() 16ss S n r N n n N n n πππ ==+是均匀分布的白噪音不相关 和)(),()(10n N n N n S ) (n x x 1()() ) (n e n N n =
自适应噪声消除算法的性能比较与仿真
第9卷 第19期 2009年9月167121819(2009)1925835205 科 学 技 术 与 工 程 Science Technol ogy and Engineering Vol 19 No 119 Oct .2009 Ζ 2009 Sci 1Tech 1Engng 1 自适应噪声消除算法的性能比较与仿真 江清潘 常太华3 朱红路 马 军 1 (华北电力大学控制科学与工程学院,北京102206;湖北省汉江河道管理局1,潜江433100) 摘 要 在信号处理中,噪声往往是非平稳和随时间变化的,传统方法很难解决噪声背景中的信号提取问题。通过对自适应噪声消除原理的研究,介绍了基于参考信号和基于预测原理的两种自适应噪声消除(ANC,Adap tive Noise Cancellati on )方法,分析对比了基于最小均方(L M S,LeastMean Squares )、递推最小二乘(RLS,Recursive Least Squares )和平方根自适应滤波(QR -RLS,recursive least squares based on QR decompositi on )三种噪声消除算法的性能。仿真结果表明:这几种算法都能从高背景 噪声中有效地抑制干扰提取出有用信号,显示出了良好的收敛性能。相比之下,RLS 算法和QR -RLS 算法呈现出更快的收敛速度、更强的稳定性和抑噪能力。 关键词 自适应噪声消除 自适应滤波器 噪声中图法分类号 TP27412; 文献标志码 A 2009年6月15日收到国家自然科学基金(50776030)资助 第一作者简介:江清潘(1986—),男,福建三明人,硕士在读,研究方向:电力生产过程建模、燃烧优化。E 2mail:jqpgg m @g mail 1com jqphd2007@yahoo 1cn 。 3 通信作者简介:常太华(1951—),女,山西榆社人,教授,研究方向: 信息融合及检测新技术。 在信号处理领域中噪声消除是一个非常重要的问题,对噪声环境中系统的正常工作有着很大的影响。隐藏在有用信号中的背景噪声往往是非平稳且随时间变化的,信号和噪声的统计特性往往无法知晓,而且背景噪声中的有用信号往往微弱而不稳定,此时采用传统方法很难解决噪声环境中的信号提取问题 [1] 。近年来自适应噪声消除(ANC )系 统成为消除噪声的研究热点,利用自适应滤波器具有在未知环境下良好运行并跟踪输入统计量随时间变化的能力,通过不断调整抽头权系数来适应发生变化的信号和噪声的统计特性,达到消除噪声干扰的目的 [2] 。 根据噪声知识的了解情况,ANC 系统可采用基于参考信号和基于预测原理的两种噪声消除方法。在噪声相关知识足够了解的情况下可选取一个与噪声信号相关的参考信号进行噪声干扰对消。在 噪声相关知识了解不够充分时可根据自适应滤波器的预测原理,利用噪声信号的时间不相关性来达到噪声消除的目的。 ANC 系统的核心是自适应滤波器,通过自适应 算法对滤波器权系数进行调整以实现最佳滤波。不同的自适应滤波器算法具有不同的收敛速度、稳态失调和算法复杂度,基于上述两种噪声消除方法对比分析了基于L MS 、RLS 和QR -RLS 三种算法的噪声消除效果。仿真结果表明,这几种算法都能从高背景噪声中提取有用信号。相比之下,在基于参考信号的方法中,RLS 算法体现出了更好的收敛性能和抑制干扰的能力。在基于预测的消噪方法中,QR -RLS 算法呈现出了更快的收敛速度、更强的稳 定性和抑噪能力。 1 自适应噪声消除原理及算法 111 噪声消除原理 自适应滤波器噪声消除系统是以噪声干扰为处理对象,将其抑制或者进行衰减,以提高输出端的信噪比质量。分析了基于参考信号和基于预测原理的两种自适应噪声消除方法。
自适应噪声消除实验报告
开放型创新实验报告实验项目:自适应噪声消除器 编号:******** 实验教师:*** 报告人:*** 学号:******** 一、实验目的
1.了解自适应波器原理及性能分析方法. ⒉掌握LMS算法的基本原理和算法中矩阵的构造方法. 二、实验原理 ⒈自适应滤波原理 自适应滤波器是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的数字滤波器和自适应算法两部分组成,如图1所示: 图1 自适应滤波器原理图 x(n)称为输入信号,y(n)称为输出信号,d(n)称为期望信号或者训练信号,e(n)为误差信号,其中e(n)=d(n)-y(n)。自适应滤波器的系数(权值)根据误差信号e(n),通过一定的自适应算法不断的进行改变,以达到使输出信号y(n)最接近期望信号 图中参数可调的数字滤波器和自适应算法组成自适应滤波器。自适应滤波算法是滤波器系数权值更新的控制算法,根据输入信号与期望信号以及它们之间的误差信号,自适应滤波算法依据算法准则对滤波器的系数权值进行更新,使其能够使滤波器的输出趋向于期望信号。 ⒉LMS算法原理 LMS算法是自适应滤波器中常用的一种算法,其系统的系数随输入序列而改变。LMS 算法是对初始化的滤波器系数依据最小均方误差准则进行不断修正来实现的。由于LMS 算法是在一个初始化值的基础上进行逐步调整得到的,因此,在系统进入稳定之前有一个调整的时间,这个时间受到算法步长因子u的控制,在一定值范围内,增大u会减小调整时间,但超过这个范围值时系统不再收敛,u的最大取值为R的迹。权系数更新公式为:W(i+1)=W(i)+2ue(i)X(i) 依据上述算式,制定LMS滤波器设计实现方法为: (1)设计滤波器的初始化权系数W(0)=0,收敛因子u; (2)计算输入序列经过滤波器后的实际输出值:out(n)=WT(n)*X(n);
MATLAB实验报告
数字信号处理及MATLAB 实验报告 班级: 学号: 姓名:
4.7.2 例4,2 设x(n)是由两个正弦信号及白噪声的叠加,试用FFT文件对其作频谱分析。程序清单 %产生两个正弦加白噪声 N=256; f1=.1;f2=.2;fs=1; a1=5;a2=3; w=2*pi/fs; x=a1*sin(w*f1*(0:N-1))+a2*sin(w*f2*(0:N-1))+randn(1,N); %应用FFT求频谱 subplot(2,2,1); plot(x(1:N/4)); title('原始信号'); f=-0.5:1/N:0.5-1/N; x=fft(x); y=ifft(x); subplot(2,2,2); plot(f,fftshift(abs(x))); title('频域信号'); subplot(2,2,3); plot(real(x(1:N/4))); title('时域信号');
例4.3 设x(n)为长度N=6的矩形序列,用MATLAB程序分析FFT取不同长度时x(n)频谱的变化。N=8,32,64,时x(n)的FFT MATLAB实现程序如下。 x=[1,1,1,1,1,1]; N=8; y1=fft(x,N); n=0:N-1; subplot(3,1,1);stem(n,abs(y1),'.k');axis([0,9,0,6]); N=32; y2=fft(x,N); n=0:N-1; subplot(3,1,2);stem(n,abs(y2),'.k');axis([0,40,0,6]); N=64; y3=fft(x,N); subplot(3,1,3);stem(n,abs(y3),'.k');axis([0,80,0,6]);
基于MATLAB的自适应噪声抵消器的设计与实现
2009年11月第”期危子测斌 ELECTRoNICTEsT Nov.2009 No.1/ 基于M棚,AB的自适应噪声抵消器的设计与实现 徐梅花,王福明 (中北大学现代教育技术与信息中心太原030051) 摘要:阐述了自适应噪声抵消(ANC)技术的基本原理,基于自适应滤波器的原理,设计了自适应噪声抵消器; 在对自适应滤波器相关理论研究的基础上,重点研究了自适应噪声抵消器的核心——I。MS自适应滤波算法。 在MATLAB中的Simulink下,建立了自适应噪卢抵消器的模型,并通过设置不同的参数进行仿真,结果表明系 统能够有效地从噪声中恢复出原始信号。最后对系统进行了性能分析,给出了自适应噪声抵消系统在实际应用 中选取参考信号的要求。 关键词:自适应滤波;噪声抵消;LMS;MATI。AB仿真 中图分类号:TN911.4文献标识码:A Designandrealizationofadaptivenoisecancellerbasedon MATLAB XuMeihua,WangFuming (ModernEducationTechnology&InformationCenterofNorthUniversityofChina。Taiyuan030051.China) Abstract:ThispaperelaboratedthebasictheoryofAdaptivenoisecancellationtechnology(ANC),designedAdaptivenoisecancellerbasedonadaptivefilter;Afterstudyingtherelated theoryofadaptivefilter,thecoreofadaptivenoisecaneeller-LMSadaptivefilteringalgorithmis researchedemphatically.UndertheSimulinkofMATI。AB,builtthemodelofadaptivenoise cancellerandsimulatedthroughinstallingdifferentparameters.Theresultsdeclaredthesystem canrecoveroriginalsignalfromnoiseeffectively.Finally,analyzedthefunctionofsystem,and giventhesystemrequirementsofselectedreferencesignalsinthepracticalapplication. Keywords:Adaptivefiltration;Noisecancellation;LMS;MATLABsimulation O引言 基于自适应噪声抵消技术(AdaptiveNoiseCan—cellation,ANC),作为在强噪声背景下通信的一种主要语音增强方法,把信号中的噪声和语音信号进行有效的分离,降低或抑制环境噪声的影响,有效提高了语音的清晰度。自Widrow等于1967年提出自适 电量塑gi墓 ELECTRON『GTEST应滤波概念以来,因其计算量小、易于实现等优点,发展极为迅速。目前广泛应用于通信、语音信号处理、图像处理、模式识别、系统辨识及自动控制等领域,是目前最活跃的研究领域之一。自适应噪声抵消技术和其他语音增强方法相比,突出之处就是该方法不基于任何信号模型和对信号的统计特性无特殊要求,故其应用范围相当广泛。 早在1975年,美国斯坦福大学的Widrow等 型 万方数据