一种基于多模板匹配的字符识别方法

一种基于多模板匹配的字符识别方法
李 婧,龚晓峰,王瑞辉
(四川大学 电气信息学院 成都 610065)
摘要:本文在对字符进行各种预处理,包括倾斜校正,归一化,分割的基础上,依据字符的高度,宽度范围,提出了一种基于多模板匹配的字符识别方法,并将该算法运用于仿宋_GB2312字体,识别率达到98%以上,有效的提高了识别正确率,简单易实现。
关键词:倾斜校正;字符分割;多模板匹配
中图分类号:TP391.41 文献标识码:A
A recognition method of characters based on
Multi-Template Matching
LI Jing, GONG Xiao-feng, Wang Rui-hui
(College of Electrical Information, Sichuan University, Chengdu 610065, China) Abstract: This paper first do pretreatment such as skew correction, normalization, segmentation of characters, etc. Then it presented a new muti-template matching method according to the range of the character’s width and height. At last, the experiment used in the FangSong_GB2312 font show that this method can improve recognition accuracy and is easy to put into practice.
Keywords: skew correction; character segmentation; multi-template matching
0 引言
字符识别是图像处理和模式识别领域中的研究课题之一,它涉及模式识别、图像处理、人工智能、中文信息处理等学科,是一门综合性技术,在中文信息处理、办公室自动化、人工智能、车牌识别、交通管理等高技术领域都有着重要的实用价值和理论意义[1]。目前字符识别主要有以下几种方法:1)利用字符的统计特征进行特征提取,2)基于字符结构分析的识别方法,3)利用字符的结构特征和变换进行特征提取,4)基于模板匹配的方法进行字符识别,5)近年来又出现了基于神经网络的算法和基于矩和小波变换的识别算法。但由于同一字体的字符有各种字号的差异,单一的运用上述某一种方法的效果都不理想[2]。为了提高识别率,本文从识别率较高的模板匹配法入手,对单模板匹配和特征模板进行改进,提出了一种根据字符高度,宽度值为每个字聚类多个模板,最后采用海明距离实现多模板的匹配。通过将该算法运用于仿宋_GB2312字体,发现这一方法能有效解决相似度高的字符的正确识别问题,有一定的实用价值。
1 识别系统总体方案
字符识别系统一般包括字符预处理,字符分割,字符识别三个环节,系统框图如图1所示。
图1 字符识别系统框图
2 预处理
字符图像可能是彩色的,可能含有噪声点或位置倾斜,为了便于分割和特征比对,我们要先将其全部统一成标准的16×8的二值化模板。所以需要进行去噪[3],二值化,倾斜校正,
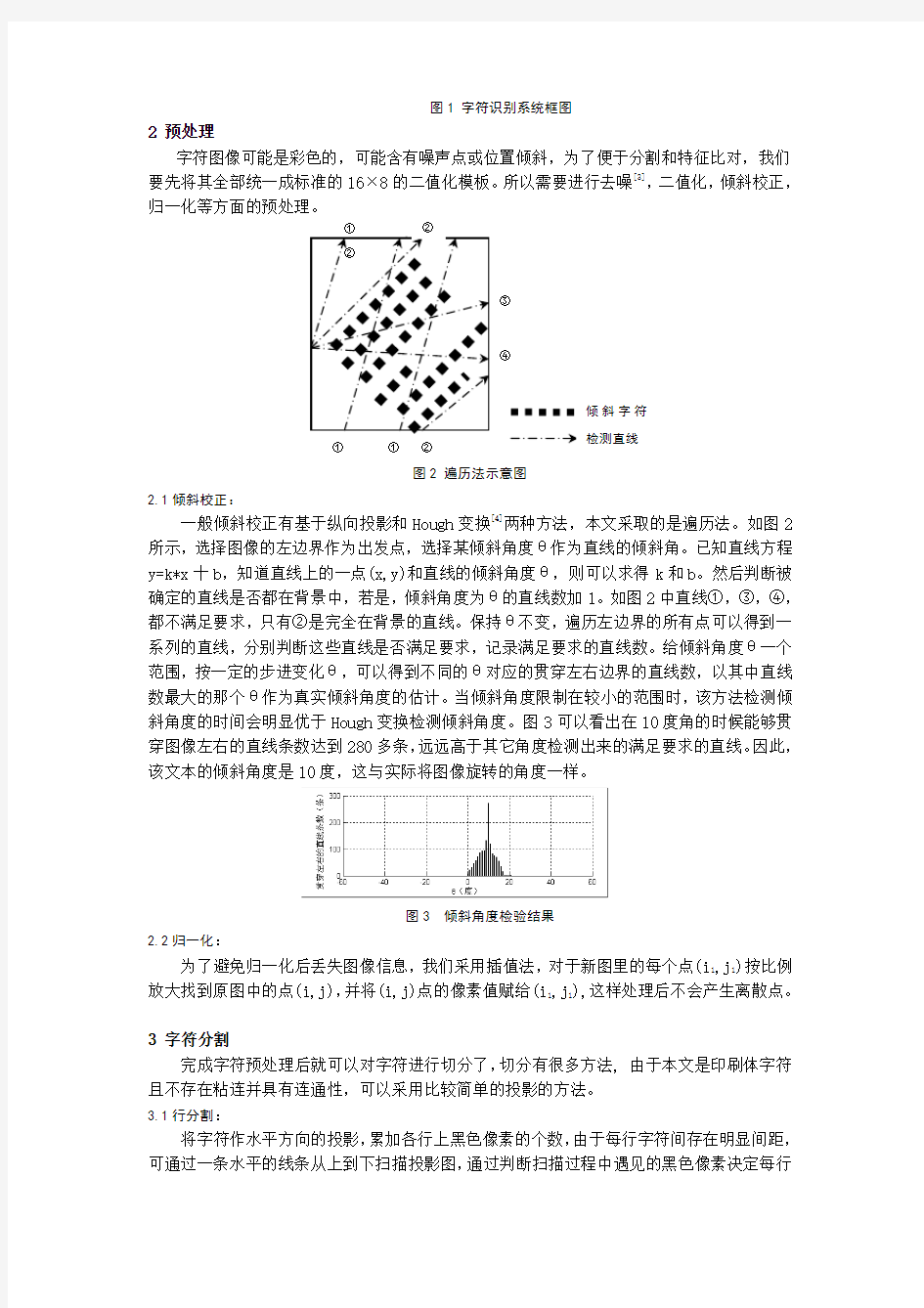
图2 遍历法示意图
2.1倾斜校正:
一般倾斜校正有基于纵向投影和Hough 变换[4]两种方法,本文采取的是遍历法。如图2
所示,选择图像的左边界作为出发点,选择某倾斜角度θ作为直线的倾斜角。已知直线方程y=k*x 十b,知道直线上的一点(x,y)和直线的倾斜角度θ,则可以求得k 和b。然后判断被确定的直线是否都在背景中,若是,倾斜角度为θ的直线数加1。如图2中直线①,③,④,都不满足要求,只有②是完全在背景的直线。保持θ不变,遍历左边界的所有点可以得到一系列的直线,分别判断这些直线是否满足要求,记录满足要求的直线数。给倾斜角度θ一个范围,按一定的步进变化θ,可以得到不同的θ对应的贯穿左右边界的直线数,以其中直线数最大的那个θ作为真实倾斜角度的估计。当倾斜角度限制在较小的范围时,该方法检测倾斜角度的时间会明显优于Hough 变换检测倾斜角度。图3可以看出在10度角的时候能够贯穿图像左右的直线条数达到280多条,远远高于其它角度检测出来的满足要求的直线。因此,该文本的倾斜角度是10度,这与实际将图像旋转的角度一样。
图3 倾斜角度检验结果
2.2归一化:
为了避免归一化后丢失图像信息,我们采用插值法,对于新图里的每个点(i 1,j 1)按比例放大找到原图中的点(i,j),并将(i,j)点的像素值赋给(i 1,j 1),这样处理后不会产生离散点。
3 字符分割
完成字符预处理后就可以对字符进行切分了,切分有很多方法, 由于本文是印刷体字符且不存在粘连并具有连通性,可以采用比较简单的投影的方法。
3.1行分割:
将字符作水平方向的投影,累加各行上黑色像素的个数,由于每行字符间存在明显间距,可通过一条水平的线条从上到下扫描投影图,通过判断扫描过程中遇见的黑色像素决定每行
的起始位置。
3.2 字符粗分割:
方法与行分割类似,区别仅在于在已分割出的每行字符中作垂直方向的投影,根据字间距,判断扫描过程中遇见的黑色象素决定字符的起始和结束地址。
3.3 字符细分割:
由于字符大小不一,仅用一次上述方法会使小字符和一行多排的字符分割不准确,为了精确取得每个字符的边框,我们必需在已分割出的方框中再次进行行投影,列投影,完成二次分割,效果如图4。
图4 二次分割效果图
4 特征提取
4.1 投影特征
二值的字符图像向下投影,即从字符上边缘向下扫描,遇到字符像素即作累积投影,最后对投影特征进行波峰、波谷判断[5]
,依据比例构成形成特征模板。以后得到的投影特征与模板比较分类。本文采用水平方向和竖直方向的投影合起来作为二维特征向量。
4.2 模板特征
4.2.1简单模板匹配 简单模板匹配过程中选择的模板与字符归一化后的图像统一尺寸为高16像素宽8像素。模板只有一套,本文中用仿宋_GB2312字体中36号字做模板,直接进行模板与字符图像的逐点匹配,采用海明距离[6]即:
i d =168
00(,)(,)i
y x T x y I x y ==?∑∑ 其中T i (x,y)为第i 号模板,I(x,y)为字符图像,且T i (x,y),I(x,y)都取值0或者1。0表示白色背景象素,1表示黑色字符象素。取d i 最小时T i (x,y)对应的字符为匹配结果。但由于每种字体的字符从10号到72号不等,而模板仅一种必然会引起识别误差,为处理这个问题首先想到了下面的改进方法。
4.2.2基于概率的多模板匹配
在10号至72号字种,平均的选取八种字号建模,得到八个模板,使这八个模板基本涵盖了各种大小的字符。并计算每个模板的平均字符高度。识别时,首先统计该文本中所有字符的高度,计算哪种高度的字符数目最多,根据出现概率最多的高度来决定选用哪个模板进行匹配。当文本中大多数为一种字号的字符,模板选择正确时,识别率基本可达100%,并且由于是基于概率统计的方法,所以文本字符数越多,越容易正确选择模板,识别正确率越高。而当文本中含有各种不同字号的字符时,每种高度出现的概率相近,就很难选择模板,造成识别错误。所以综上所述,这种基于概率的多模板匹配实际是一种假相的多模板,因为最终用于匹配的仍然为单一模板。适用于文本字数多,字号相近的字符识别。
4.2.3改进的多模板匹配
在仿宋_GB2312字体中对10到72号字符按照字号的不同共做14个模板,统计各个模板的高,宽范围,对待识别的每个字符按其高,宽值寻找匹配模板,若有多个模板符合要求,则都进行匹配,在结果中选择最相似的一个作为最终识别结果。图5为字符c 的识别过程。
图5 单字符识别过程
4.3 功能扩展
4.3.1不同字号混排的识别
对这种情况如果依然采用自上而下,自左及右依次进行字符的对应匹配并对应显示的方式,会使一行内重叠摆放的几个小字符同时产生错误,为解决这一问题,我们首先采用第三部分提到的二次分割法精确分割然后用竖直排列显示方法来处理这一问题。
4.3.2特殊字符i,j的识别
对于字符i,j,由于字符中有断隔,为了避免错分在分割时设置一定阈值,对像素值小于一定数的不予标记,取消分割。
5 分析与结果
选取仿宋_GB2312字体10-72号字符的868个样本对这三种模板:标准单模板,基于概率的多模板,改进的多模板进行试验,考虑各种情况,选取的样本包括有污点,彩色,倾斜,不同字号混排等情况。得到的实验结果如表1。
表1 实验结果
算法 正确匹配个数 识别率
单模板 741 85.4%
基于概率的多模板 795 91.6%
改进的多模板 858 98.8%
由实验结果可以看出改进后的多模板匹配虽然在计算量和复杂度上都高于前两种模板,但是这种匹配法对每个字符寻找模板,多次匹配,找出最相似的字符,是真正意义上的多模板匹配。所以除了特小号字符外,对仿宋_GB2312字体识别率在98%以上,且不受字符数目多少,字号是否一致的限制,解决了基于概率识别的局限性。通过验证,本算法在印刷体字符识别方面具有很高的实用价值,简单易行,可靠性高。
本文作者创新点:1.预处理阶段用改进的遍历法进行倾斜校正。2.分割阶段对各种情况下包括不同字号,混排,特殊字符(i,j)的精细划分。3.识别阶段对单一模板匹配法进行改进,采用海明距离实现多模板的匹配,大大提高了识别的正确率。
参考文献
[1]Parker J.R.. Gray Level Thresholding in Badly Illustrated Images. Ieee Tran on Patterm Analysis and Machine Intelligence, 1991, 13(8): 813—819.
[2]P V S Rao. A Knowledge-Based Approach for Script Recognition without Training[J]. IEEE Tran on PAMI, 1996, 18(4): 460-464.
[3]Guo Xiao-song, Kong Xiang-yu, Yang Bi-wu. Algorithm research of templet matching method based on connected area applied to character recognition[J]. Computer Engineering and Applications, 2002, 12(1): 46-47.
[4]Mikhail J Atallah. Fast Image Template Matching in the Sum of the Absolute Value of Differences Measure[J]. IEEE Tran on IMAGE PROCESSING, 2001: 10(4).
[5]曾庆鹏,吴水秀,王明文.模式识别中的特征提取研究[J].微计算机信息,2008,1-1:220-221。
[6]马永力,夏秋华.基于数学形态学的车牌精定位算法的研究[J].微计算机信息,2008,1-1:227-228
作者简介:李婧(1984-),女,汉,陕西西安人,硕士,研究方向为检测技术与自动化装置,龚晓峰(1965-),男,汉,浙江金华人,教授,博士,研究方向为计算机控制与管理。 Biography:LI Jing(1984-) Famale(the Han nationality), Sichuanchengdu, College of Electricity and Electronic Information, Sichuan University for Technology of Detection and Automtic Device;
GONG Xiao-feng(1965-) Male(the Han nationality), ZhejiangJinhua, College of Electricity and Electronic Information, Sichuan University, Associate Professor, Control Theory and Control Engineering.
(610065 四川成都 四川大学电气信息学院)李婧 龚晓峰
(College of Electrical and Electronic Information Technology,Sichuan University, ChengDu, 610065)LI Jing, GONG Xiao-feng
Halcon中模板匹配方法的总结归纳
Halcon中模板匹配方法的总结归纳 基于组件的模板匹配: 应用场合:组件匹配是形状匹配的扩展,但不支持大小缩放匹配,一般用于多个对象(工件)定位的场合。 算法步骤: 1.获取组件模型里的初始控件gen_initial_components() 参数: ModelImage [Input] 初始组件的图片 InitialComponents [Output] 初始组件的轮廓区域 ContrastLow [Input] 对比度下限 ContrastHigh [Input] 对比度上限 MinSize [Input] 初始组件的最小尺寸 Mode[Input] 自动分段的类型 GenericName [Input] 可选控制参数的名称 GenericValue [Input] 可选控制参数的值 2.根据图像模型,初始组件,训练图片来训练组件和组件相互关系train_model_components() 3.创建组件模型create_trained_component_model() 4.寻找组件模型find_component_model() 5.释放组件模型clear_component_model() 基于形状的模板匹配: 应用场合:定位对象内部的灰度值可以有变化,但对象轮廓一定要清晰平滑。 1.创建形状模型:create_shape_model() 2.寻找形状模型:find_shpae_model() 3.释放形状模型:clear_shape_model() 基于灰度的模板匹配: 应用场合:定位对象内部的灰度值没有大的变化,没有缺失部分,没有干扰图像和噪声的场合。 1.创建模板:create_template() 2.寻找模板:best_match() 3.释放模板:clear_template() 基于互相关匹配: 应用场合:搜索对象有轻微的变形,大量的纹理,图像模糊等场合,速度快,精度低。 1.创建模板:create_ncc_model() 2.寻找模板:find_ncc_model() 3.释放模板:clear_ncc_model() 基于变形匹配: 应用场合:搜索对象有轻微的变形。 1.创建模板:create_local_deformable_model() 2.寻找模板:find_local_deformable_model() 3.释放模板:clear_deformable_model()
基于模板匹配算法的数字识别讲解
中南民族大学 毕业论文(设计) 学院: 计算机科学学院 专业: 软件工程年级:2009 题目: 基于模板匹配算法的数字识别学生姓名: 李成学号:09065093指导教师姓名: 李波职称: 讲师 2013年5月
中南民族大学本科毕业论文(设计)原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。 作者签名:2013年月日
摘要 (1) Abstract (1) 1 绪论 (2) 1.1 研究目的和意义 (2) 1.2 国内外研究现状 (2) 2 本文基本理论介绍 (3) 2.1 位图格式介绍 (3) 2.2 二值化 (3) 2.3 去噪 (3) 2.4 细化 (4) 2.5 提取骨架 (4) 3 图像的预处理 (5) 3.1 位图读取 (5) 3.2 二值化及去噪声 (5) 3.3 提取骨架 (6) 4 基于模板匹配的字符识别 (8) 4.1 样本训练 (8) 4.2 特征提取 (8) 4.3 模板匹配 (9) 4.4 加权特征模板匹配 (10) 4.5 实验流程与结果 (10) 5 结论 (16) 5.1 小结 (16) 5.2 不足 (16) 6 参考文献 (17)
基于模板匹配算法的数字识别 摘要 数字识别已经广泛的应用到日常生活中,典型的数字自动识别系统由图像采集、预处理、二值化、字符定位、字符分割和字符识别等几部分组成, 这些过程存在着紧密的联系。传统的模板匹配算法因为图像在预处理之后可能仍然存在较大的干扰,数字笔画粗细不均匀,有较大的噪声,识别效率不高。本文采的主要思想就是对字符进行分类,之后对字符进行细化,提取细化后字符的特征矢量,与模板的特征矢量进行加权匹配,误差最小的作为识别结果。本文在模板匹配法的基础上, 采用了特征值加权模板匹配法, 并且改进了匹配系数的求法。应用该法取得了满意的效果, 提高了识别率。 关键词:模板匹配;数字识别;特征值加权;字符识别; Template matching algorithm-based digital identification Abstract Digital identification has been widely applied to daily life, the typical digital automatic identification system by the image acquisition, pre-processing, binarization, character positioning, character segmentation and character recognition several parts, there is a close link these processes. Traditional template matching algorithm because the image may still exist after pre-greater interference, digital strokes uneven thickness, the noise, the identification efficiency is not high. Adopted herein main idea is to classify the character after character refinement, the characters feature vector extraction refinement, and the template feature vector is weighted matching, the minimum error as a recognition result. Template matching method based on feature weighted template matching method, and improve the matching coefficient method. The application of the method to obtain satisfactory results, to improve the recognition rate. Key words:Template matching; digital identification; characteristic value weighted; character recognition;
模板匹配MATLAB实现及算法优化
模板匹配MATLAB实现及算法优化
一、引言 现代社会已进入信息时代,随着计算机技术、通信技术和数学的发展,图像信息处理能力和水平也不断提高,相应的也得到和更多关注、研究和更加广泛的应用。图像匹配是图像处理的一项关键技术,可广泛用于目标识别与跟踪、立体视觉、变化检测、车场车牌识别、人脸识别、机器人导航、测绘、等领域,已成为一门新兴的分支学科。由于拍摄时间、拍摄角度、自然环境的变化、多种传感器的使用和传感器本身的缺陷,使拍摄的图像不仅受噪声的影响,而且存在严重的灰度失真和几何畸变。在这种条件下,如何有效地进行图像匹配一直是人们研究的热点和难点。 要研究模板匹配,首先必须明确模板匹配的定义:模板匹配是指通过一定的匹配算法在两幅或多幅图像之间识别同名点,如二维图像匹配中通过比较目标区和搜索区中相同大小的窗口的相关系数,取搜索区中相关系数最大所对应的窗口中心点作为同名点。其实质是在基元相似性的条件下,运用匹配准则的最佳搜索问题。简单的讲就是,要判读一幅大图像中是否存在某种已知的图案,则以一幅与该图案有着相同尺寸和方向的小图像为模板,通过一定的算法可以在图中找到目标,确定其坐标位置。 那么如何实现模板与原图像的匹配呢?下面将结合一个具体例子说明模板匹配的实现过程。 二、问题描述及解决方法 1.问题描述 现有模板如下图: 原图如下图: 问题:如何在原图中找到模板所处的位置,并把该位置标记出来。 2.解决方法
首先必须建立判断模板与原图相应位置相似程度的准则。对于彩色图像,是基于图像的特征匹配;而灰度图像,则是基于相关函数。本实验的处理对象主要是灰度图片。 相关函数又分成两类: (1) 差值测度。计算公式如下: max |(,)(,)|f x y g x y ε=- |(,)(,)|D f x y g x y dxdy ε=-?? 22[(,)(,)]D f x y g x y dxdy ε=-?? (2) 相关测度。计算公式如下: 1222(,)(,)(,)[(,)(,)]D D D f x y g x y dxdy p x y f x y dxdy g x y dxdy = ??????? 显然,上式中的p(x,y)取值范围是0到1。越接近于0,表示两图像相差越大;越接近于1,表示两图像越相似。 有了描述相似程度的数学模型,接下来就可以用MATLAB 编程实现模板匹配,从而解决上述问题了。 三、 MATLAB 实现 要实现这个程序,必须有三个重要组成部分: 1. 模板循环 功能:实现模板扫过原图的每一个像素点。 语句: for i=1:M-m for j=1:N-n end end 描述:以模板左上角第一个点为标志点,使其依次从左到右、从上到下扫过原图每一个像素点。 2. 相似性判断 功能:在每一次循环时,计算模板与覆盖的原图区域的相似程度,并判断两图像是否相似。 语句: temp=imcrop(im,[j,i,n-1,m-1]);
基于HALCON的模板匹配方法总结.
基于HALCON的模板匹配方法总结 基于HALCON的模板匹配方法总结 HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果。在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。 1. Shape-Based matching的基本流程 HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。基本流程是这样的,如下所示: ⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用 area_center()找到这个矩形的中心;
⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等; ⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization来减少模板点的数量是很有用的;MinConstrast将模板从图像的噪声中分离出来,如果灰度值的波动范围是10,则MinConstrast应当设为10;Metric参数决定模板识别的条件,如果设为’use_polarity’,则图像中的物体和模板必须有相同的对比度;创建好模板后,这时还需要监视模板,用inspect_shape_model()来完成,它检查参数的适用性,还能帮助找到合适的参数;另外,还需要获得这个模板的轮廓,用于后面的匹配,get_shape_model_contours()则会很容易的帮我们找到模板的轮廓; ⑷ 创建好模板后,就可以打开另一幅图像,来进行模板匹配了。这个过程也就是在新图像中寻找与模板匹配的图像部分,这部分的工作就由函数 find_shape_model()来承担了,它也拥有许多的参数,这些参数都影响着寻找模板的速度和精度。这个的功能就是在一幅图中找出最佳匹配的模板,返回一个模板实例的长、宽和旋转角度。其中参数SubPixel决定是否精确到亚像素级,设为’interpolation’,则会精确到,这个模式不会占用太多时间,若需要更精确,则可设为’least_square’,’lease_square_high’,但这样会增加额外的时间,因此,这需要在时间和精度上作个折中,需要和实际联系起来。比较重要的两个参数是MinSocre和Greediness,前一个用来分析模板的旋转对称和它们之间的相似度,值越大,则越相似,后一个是搜索贪婪度,这个值在很大程度上影响着搜索速度,若为0,则为启发式搜索,很耗时,若为1,则为不安全搜索,但最快。在大多数情况下,在能够匹配的情况下,尽可能的增大其值。 ⑸ 找到之后,还需要对其进行转化,使之能够显示,这两个函数 vector_angle_to_rigid()和affine_trans_contour_xld()在这里就起这个作用。前一个是从一个点和角度计算一个刚体仿射变换,这个函数从匹配函数的
图像处理技术--模板匹配
图像处理技术——模板匹配算法 左力2002.3. 认知是一个把未知与已知联系起来的过程。对一个复杂的视觉系统来说,它的内部常同时存在着多种输入和其它知识共存的表达形式。感知是把视觉输入与事前已有表达结合的过程,而识别也需要建立或发现各种内部表达式之间的联系。 匹配就是建立这些联系的技术和过程。建立联系的目的是为了用已知解释未知。 章毓晋《图像工程下册》P.163 一.模板匹配的基本概念 模板就是一幅已知的小图像。模板匹配就是在一幅大图像中搜寻目标,已知该图中有要找的目标,且该目标同模板有相同的尺寸、方向和图像,通过一定的算法可以在图中找到目标,确定其坐标位置。 以8位图像(其1个像素由1个字节描述)为例,模板T( m ? n个像素)叠放在被搜索图S( W ? H个像素)上平移,模板覆盖被搜索图的那块区域叫子图Sij。i,j为子图左上角在被搜索图S上的坐标。搜索范围是: 1 ≤ i ≤ W – M 1 ≤ j ≤ H – N 通过比较T和Sij的相似性,完成模板匹配过程。 注意:图像的数据是从下到上、从左到右排列的。 可以用下式衡量T和Sij相似性: ∑∑ = =- = N n ij M m n m T n m S j i D 12 1 )] , ( ) , ( [ ) ,(被搜索图 S 模板 T m i {
∑∑ ∑∑ ∑∑ ======+?-=N n M m N n ij M m N n ij M m n m T n m T n m S n m S 1 2 1 1 1 1 2 1 )] ,([),(),(2)],([ 上式的第一项为子图的能量,第三项为模板的能量,都与模板匹配无关。第二项是模板和子图的互相关,随( i, j )而改变。当模板和子图匹配时,该项有极大值。将其归一化,得模板匹配的相关系数: ∑∑∑∑∑∑======?= N n M m N n ij M m N n ij M m n m T n m S n m T n m S j i R 1 2 1 1 2 1 1 1 )] ,([)],([) ,(),(),( 当模板和子图完全一样时,相关系数R( i, j ) = 1。在被搜索图S 中完成全部搜索后,找出R 的最大值Rmax( im, jm ),其对应的子图Simjm 即为匹配目标。显然,用这种公式做图像匹配计算量大、速度较慢。 另一种算法是衡量T 和Sij 的误差,其公式为: ∑∑ ==-=N n ij M m n m T n m S j i E 1 1 |),(),(|),( E( i, j )为最小值处即为匹配目标。为提高计算速度,取一个误差阈值E 0,当E( i, j )> E 0时就停止该点的计算,继续下一点计算。 试验结果如下: 注:以上试验是在赛扬600 PC 机上用VC6.0进行的。 结果表明:被搜索图越大,匹配速度越慢;模板越小,匹配速度越快。误差法速度较快,阈值的大小对匹配速度影响大,和模板的尺寸有关。 二.改进模板匹配算法 我在误差算法的基础上设计了二次匹配误差算法: 第一次匹配是粗略匹配。取模板的隔行隔列数据,即四分之一的模板数据,在被搜索图上进行隔行隔列扫描匹配,即在原图的四分之一范围内匹配。由于数据量大幅度减少,匹配速度显著提高。 为了合理的给出一个误差阈值E0,我设计了一个确定误差阈值E0的准则: E 0 = e 0 * (m+1)/2 * (n+1)/2
基于HALCON的模板匹配方法总结--蓝云杨的机器视觉之路
基于HALCON的模板匹配方法总结--蓝云杨的机器视觉之路 蓝云杨的机器视觉之路https://www.360docs.net/doc/986393898.html,/blog/user1/8/index.html 首页相册 标签机器视觉(64)图像处理(11)视频压缩(12)小波分析(5)三峡(3)生活随笔(32)HALCON(7)编程感悟(18)哲思慧语(32) 基于HALCON的模板匹配方法总结 2006-8-16 16:34:00 4 推荐很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不出时间。去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop 的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。 德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。 1. Shape-Based matching的基本流程 HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。基本流程是这样的,如下所示: ⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心; ⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等; ⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart 和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization
模板匹配
halcon模板匹配 * 在一个图片中获取ROI并在此图片中匹配 dev_close_window () dev_open_window (0, 0, 600, 600, 'black', WindowHandle) * 窗口语句 read_image(Image,'L:/Halcon test/mk2.jpg') *read_image(Image,'L:/Halcon test/mk3.jpg') *read_image(Image,'L:/Halcon test/mk4.jpg') * 这里有4张图片,每一张都说明一个小问题,附图分析。 gen_rectangle1 (ROI1, 57.8333, 49.5, 181.167, 342.833) * 画一个矩形选择ROI,矩形在左上角,覆盖一个完整的,无变形规定尺寸的商标,作为模板。 reduce_domain(Image,ROI1,ImageReduced1) * 大图和这个矩形的ROI相减就会得到一个左上角的商标的图案作为模板,命名ImageReduced。 create_shape_model(ImageReduced1,0,0,rad(360),0,'no_pregeneration','use_polarity',40,10,ModelID1) * 创建一个比例不变(1:1)的匹配的轮廓模型。具体参数下个帖子说明,也可见[Halcon算子学习交流区] Halcon模版匹配算子解析。 find_shape_model(Image,ModelID1,0,rad(360),0.7,13,0.5,'interpolation',0,0.9,Row,Column,Angle,Score) * 寻找与模板的大小尺寸必须是一比一匹配的,只是角度的不同而已,若大小发生变化,则不能匹配 get_shape_model_contours(ModelContours1,ModelID1,1) * 在大图中获取匹配。 for i := 0 to |Row|-1 by 1 vector_angle_to_rigid(0,0,0,Row【i】,Column【i】,Angle【i】,HomMat2D) affine_trans_contour_xld(ModelContours2,ContoursAffinTrans,HomMat2D) endfor * 获取匹配。 disp_message (WindowHandle, '总共匹配了' + |Row| + '个商标', 'window', 12, 12, 'red', 'true') * 输出数量统计。 clear_shape_model(ModelID1) stop()
模板匹配
图像模式识别中模板匹配的基本概念以及基本算法 认知是一个把未知与已知联系起来的过程。对一个复杂的视觉系统来说,他的内部常同时存在着多种输入和其他知识共存的表达形式。感知是把视觉输入与事先已有表达结合的过程,而识别与需要建立或发现各种内部表达式之间的联系。匹配就是建立这些联系的技术和过程。建立联系的目的是为了用已知解释未知。(摘自章毓晋《图像工程》) 1、模板匹配法: 在机器识别事物的过程中,常常需要把不同传感器或同一传感器在不同时间、不同成像条件下对同一景象获取的两幅或多幅图像在空间上对准,或根据已知模式到另一幅图像中寻找相应的模式,这就叫匹配。在遥感图像处理中需要把不同波段传感器对同一景物的多光谱图像按照像点对应套准,然后根据像点的性质进行分类。如果利用在不同时间对同一地面拍摄的两幅照片,经套准后找到其中特征有了变化的像点,就可以用来分析图中那些部分发生了变化;而利用放在一定间距处的两只传感器对同一物体拍摄得到两幅图片,找出对应点后可计算出物体离开摄像机的距离,即深度信息。 一般的图像匹配技术是利用已知的模板利用某种算法对识别图像进行匹配计算获得图像中是否含有该模板的信息和坐标; 2、基本算法: 我们采用以下的算式来衡量模板T(m,n)与所覆盖的子图Sij(i,j)的关系,已知原始图像S(W,H),如图所示: 利用以下公式衡量它们的相似性: 上述公式中第一项为子图的能量,第三项为模板的能量,都和模板匹配无关。第二项是模板和子图的互为相关,随(i,j)而改变。当模板和子图匹配时,该项由
最大值。在将其归一化后,得到模板匹配的相关系数: 当模板和子图完全一样时,相关系数R(i,j) = 1。在被搜索图S中完成全部搜索后,找出R的最大值Rmax(im,jm),其对应的子图Simjm即位匹配目标。显然,用这种公式做图像匹配计算量大、速度慢。我们可以使用另外一种算法来衡量T和Sij的误差,其公式为: 计算两个图像的向量误差,可以增加计算速度,根据不同的匹配方向选取一个误差阀值E0,当E(i,j)>E0时就停止该点的计算,继续下一点的计算。 最终的实验证明,被搜索的图像越大,匹配的速度越慢;模板越小,匹配的速度越快;阀值的大小对匹配速度影响大; 3、改进的模板匹配算法 将一次的模板匹配过程更改为两次匹配; 第一次匹配为粗略匹配。取模板的隔行隔列数据,即1/4的模板数据,在被搜索土上进行隔行隔列匹配,即在原图的1/4范围内匹配。由于数据量大幅减少,匹配速度显著提高。同时需要设计一个合理的误差阀值E0: E0 = e0 * (m + 1) / 2 * (n + 1) / 2 式中:e0为各点平均的最大误差,一般取40~50即可; m,n为模板的长宽; 第二次匹配是精确匹配。在第一次误差最小点(imin, jmin)的邻域内,即在对角点为(imin -1, jmin -1), (Imin + 1, jmin + 1)的矩形内,进行搜索匹配,得到最后结果。
基於HALCON的模板匹配方法总结
基於HALCON的模板匹配方法總結 基於HALCON的模板匹配方法總結 很早就想總結一下前段時間學習HALCON的心得,但由於其他的事情總是抽不出時間。去年有過一段時間的集中學習,做了許多的練習和實驗,並對基於HDevelop的形狀匹配算法的參數優化進行了研究,寫了一篇《基於HDevelop的形狀匹配算法參數的優化研究》文章,總結了在形狀匹配過程中哪些參數影響到模板的搜索和匹配,又如何來協調這些參數來加快匹配過程,提高匹配的精度,這篇paper放到了中國論文在線了,需要可以去下載。 德國MVTec公司開發的HALCON機器視覺開發軟件,提供了許多的功能,在這裡我主要學習和研究了其中的形狀匹配的算法和流程。HDevelop開發環境中提供的匹配的方法主要有三種,即Component-Based、Gray-Value-Based、Shape-Based,分別是基於組件(或成分、元素)的匹配,基於灰度值的匹配和基於形狀的匹配。這三種匹配的方法各具特點,分別適用於不同的圖像特征,但都有創建模板和尋找模板的相同過程。這三種方法裡面,我主要就第三種-基於形狀的匹配,做了許多的實驗,因此也做了基於形狀匹配的物體識別,基於形狀匹配的視頻對象分割和基於形狀匹配的視頻對象跟蹤這些研究,從中取得較好的效果,簡化了用其他工具,比如VC++來開發的過程。在VC下往往針對不同的圖像格式,就會弄的很頭疼,更不用說編寫圖像特征提取、模板建立和搜尋模板的代碼呢,我想其中間過程會很復雜,效果也不一定會顯著。下面我就具體地談談基於HALCON的形狀匹配算法的研究和心得總結。 1. Shape-Based matching的基本流程 HALCON提供的基於形狀匹配的算法主要是針對感興趣的小區域來建立模板,對整個圖像建立模板也可以,但這樣除非是對象在整個圖像中所佔比例很大,比如像視頻會議中人體上半身這樣的圖像,我在後面的視頻對象跟蹤實驗中就是針對整個圖像的,這往往也是要犧牲匹配速度的,這個後面再講。基本流程是這樣的,如下所示: ⑴首先確定出ROI的矩形區域,這裡只需要確定矩形的左上點和右下點的坐標即可, gen_rectangle1()這個函數就會幫助你生成一個矩形,利用area_center()找到這個矩形的中心; ⑵然後需要從圖像中獲取這個矩形區域的圖像,reduce_domain()會得到這個ROI;這之後就可以對這個矩形建立模板,而在建立模板之前,可以先對這個區域進行一些處理,方便以後的建模,比如閾值分割,數學形態學的一些處理等等; ⑶接下來就可以利用create_shape_model()來創建模板了,這個函數有許多參數,其中金字塔的級數由Numlevels指定,值越大則找到物體的時間越少,AngleStart和AngleExtent 決定可能的旋轉范圍,AngleStep指定角度范圍搜索的步長;這裡需要提醒的是,在任何情
模板匹配详解
模板匹配? 目标? 在这节教程中您将学到: ?使用OpenCV函数matchTemplate在模 板块和输入图像之间寻找匹配,获得匹配结 果图像 ?使用OpenCV函数minMaxLoc在给定的 矩阵中寻找最大和最小值(包括它们的位 置). 原理? 什么是模板匹配?? 模板匹配是一项在一幅图像中寻找与另一幅模板图像最匹配(相似)部分的技术. ?我们需要2幅图像: 1. 原图像(I):在这幅图像里,我们希望 找到一块和模板匹配的区域 2. 模板(T):将和原图像比照的图像 块 我们的目标是检测最匹配的区域:
?为了确定匹配区域, 我们不得不滑动模板图像和原图像进行比较: ?通过滑动, 我们的意思是图像块一次移动一个像素(从左往右,从上往下). 在每一个位置, 都进行一次度量计算来表明它是“好” 或“坏” 地与那个位置匹配(或者说块图像和原图像的特定区域有多么相似). ?对于T覆盖在I上的每个位置,你把度量值保存到结果图像矩阵(R)中. 在R 中的每个位置都包含匹配度量值:
上图就是TM_CCORR_NORMED方法 处理后的结果图像R . 最白的位置代表最 高的匹配. 正如您所见, 红色椭圆框住的位 置很可能是结果图像矩阵中的最大数值, 所以这个区域(以这个点为顶点,长宽和模 板图像一样大小的矩阵) 被认为是匹配的. 实际上, 我们使用函数minMaxLoc来定 位在矩阵R中的最大值点(或者最小值, 根据函数输入的匹配参数) . 问得好. OpenCV通过函数matchTemplate实现了模板匹配算法. 可用的方法有6个: 1. 平方差匹配method=CV_TM_SQDIFF 这类方法利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大. b. 标准平方差匹配 method=CV_TM_SQDIFF_NORMED
模板匹配,ncc
竭诚为您提供优质文档/双击可除 模板匹配,ncc 篇一:ncc计算公式 ncc是基于相似度度量的匹配算法,因为对线性光照不敏感,在目标识别和工业检测领域得到了广泛的应用。传统的ncc算法计算公式如下: {[i(x+i,y+j)-i(x,y)][t(i,j)-t]} mnncc(x,y)=其中i为目标图像;t为模板图像,模板大小为m*n 篇二:基于halcon的模板匹配方法总结 基于halcon的模板匹配方法总结 分类:halcon学习20xx-06-2616:0247人阅读评论(0)收藏举报 德国mVtec公司开发的halcon机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。hdevelop开发环境中提供的匹配的方法主要有三种,即component-based、gray-Value-based、shape-based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。这三种匹配的方法各具
特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如Vc++来开发的过程。在Vc下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。下面我就具体地谈谈基于halcon的形状匹配算法的研究和心得总结。 1.shape-basedmatching的基本流程 halcon提供的基于形状匹配的算法主要是针对感兴趣 的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。基本流程是这样的,如下所示: ⑴首先确定出Roi的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个Roi;这之后就可以对这个矩形
HALCON形状匹配总结
HALCON形状匹配总结 Halcon有三种模板匹配方法:即Component-Based、Gray-Value-Based、Shaped_based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配, 此外还有变形匹配和三维模型匹配也是分属于前面的大类 本文只对形状匹配做简要说明和补充: Shape_Based匹配方法: 上图介绍的是形状匹配做法的一般流程及模板制作的两种 方法。 先要补充点知识:形状匹配常见的有四种情况一般形状匹配模板shape_model、线性变形匹配模板 planar_deformable_model、局部可变形模板 local_deformable_model、和比例缩放模板Scale_model 第一种是不支持投影变形的模板匹配,但是速度是最高的, 第二种和第四种是支持投影变形的匹配,第三种则是支持局 部变形的匹配。 一般形状匹配模板是最常用的,模板的形状和大小一经制作 完毕便不再改变,在查找模板的过程中,只会改变模板的方 向和位置等来匹配目标图像中的图像。这个方法查找速度很 快,但是当目标图像中与模板对应的图像存在比例放大缩小
或是投影变形如倾斜等,均会影响查找结果。涉及到的算子 通常为create_shape_model 和find_shape_model 线性变形匹配模板planar_deformable_model是指模板在行列方向上可以进行适当的缩放。行列方向上可以分别独立的 进行一个适当的缩放变形来匹配。主要参数有行列方向查找 缩放比例、图像金字塔、行列方向匹配分数(指可接受的匹 配分数,大于这个值就接受,小于它就舍弃)、设置超找的角度、已经超找结果后得到的位置和匹配分数 线性变形匹配又分为两种:带标定的可变形模板匹配和不带 标定的可变形模板匹配。涉及到的算子有: 不带标定的模板:创建和查找模板算子 create_planar_uncalib_deformable_model和 find_planar_uncalib_deformable_model 带标定模板的匹配:先读入摄像机内参和外参 read_cam_par 和read_pose 创建和查找模板算子create_planar_calib_deformable_model和 find_planar_calib_deformable_model 局部变形模板是指在一张图上查找模板的时候,可以改变 模板的尺寸,来查找图像上具有局部变形的模板。例如包装 纸袋上图案查找。参数和线性变形额差不多 算子如下:create_local_deformable_model和 find_local_deformable_model
模板匹配算法
1、模板匹配法: 在机器识别事物的过程中,常常需要把不同传感器或同一传感器在不同时间、不同成像条件下对同一景象获取的两幅或多幅图像在空间上对准,或根据已知模式到另一幅图像中寻找相应的模式,这就叫匹配。在遥感图像处理中需要把不同波段传感器对同一景物的多光谱图像按照像点对应套准,然后根据像点的性质进行分类。如果利用在不同时间对同一地面拍摄的两幅照片,经套准后找到其中特征有了变化的像点,就可以用来分析图中那些部分发生了变化;而利用放在一定间距处的两只传感器对同一物体拍摄得到两幅图片,找出对应点后可计算出物体离开摄像机的距离,即深度信息。 一般的图像匹配技术是利用已知的模板利用某种算法对识别图像进行匹配计算获得图像中是否含有该模板的信息和坐标; 2、基本算法: 我们采用以下的算式来衡量模板T(m,n)与所覆盖的子图Sij(i,j)的关系,已知原始图像S(W,H),如图所示: 利用以下公式衡量它们的相似性: 上述公式中第一项为子图的能量,第三项为模板的能量,都和模板匹配无关。第二项是模板和子图的互为相关,随(i,j)而改变。当模板和子图匹配时,该项由最大值。在将其归一化后,得到模板匹配的相关系数: 当模板和子图完全一样时,相关系数R(i,j) = 1。在被搜索图S中完成全部搜索后,找出R的最大值Rmax(im,jm),其对应的子图Simjm即位匹配目标。显然,用这种公式做图像匹配计算量大、速度慢。我们可以使用另外一种算法来衡量T和Sij的误差,其公式为:
计算两个图像的向量误差,可以增加计算速度,根据不同的匹配方向选取一个误差阀值E0,当E(i,j)>E0时就停止该点的计算,继续下一点的计算。 最终的实验证明,被搜索的图像越大,匹配的速度越慢;模板越小,匹配的速度越快;阀值的大小对匹配速度影响大; 3、改进的模板匹配算法 将一次的模板匹配过程更改为两次匹配; 第一次匹配为粗略匹配。取模板的隔行隔列数据,即1/4的模板数据,在被搜索土上进行隔行隔列匹配,即在原图的1/4范围内匹配。由于数据量大幅减少,匹配速度显著提高。同时需要设计一个合理的误差阀值E0: E0 = e0 * (m + 1) / 2 * (n + 1) / 2 式中:e0为各点平均的最大误差,一般取40~50即可; m,n为模板的长宽; 第二次匹配是精确匹配。在第一次误差最小点(imin, jmin)的邻域内,即在对角点为(imin -1, jmin -1), (Imin + 1, jmin + 1)的矩形内,进行搜索匹配,得到最后结果。
基于图像灰度的模板匹配方法
基于图像灰度的模板匹配方法 图像匹配技术是数字图像信息处理和计算机视觉领域中 的—个基本问题,并在卫星遥感、空间飞行器的自动导航、武器 投射系统的末制导和寻的、光学和雷达的图像目标跟踪、地球 资源分析与检测、气象预报、医疗诊断、文字读取以及景物分析 中的变化检测等许多领域中得到广泛应用㈣。 一般来说,由于图像在不同时间、不同传感器、不同视角获得的成像条件不同,因此即使是对同一物体,在图像中所表现出来的几何特性、光学特性、空间位置都会有很大的不同,如果考虑到噪声、干扰等影响会使图像发生很大差异, 图像匹配就是通过这些不同之处找到它们的相同点。 图像匹配算法主要分为两类口:一类是基于灰度匹配的方 法;另一类是基于特征匹配的方法。前者主要用空间的一维或 二维滑动模板进行图像匹配,不同算法的区别主要在模板及相 关准则的选择方面,这类方法一般匹配率高,但计算量大,速度 较慢;后者则通过在原始图像中提取点、线、区域等显著特征作 为匹配基元,进而用于特征匹配,一般匹配速度较陕,但匹配精 度不一定高。 1.概念解释: ①数字图像:数字图像是由被称做像素的小块区域组成的二维像素矩阵。一般把图像分成3种形式:单色图像,灰度图像和彩色图像。 ②像素:表示图像颜色的最小单位 ③灰度图像:灰度图是指只含亮度信息,不含色彩信息的图像,就像平时看到的黑白照片:亮度由暗到明,变化是连续的。灰度图的每个像素的亮度用一个数值来表示,通常数值范围在0—255之间,即可用一个字节来表示,0表示黑,255表示白,而其他表示灰度。 ④点阵图:显示器的屏幕由可以发光的像素点组成. 并且从几何位置看, 所用这 些像素点构成一个矩形的阵列.利用计算机控制各像素点按我们指定的要求发光,
几种图像的检测和模板匹配方法
几种图像的检测和模板匹配方法 图象的分割与检测(识别)实际上是一项非常困难的工作。很难说清楚为什么图象应该分割成这样而不是那样。人类的视觉系统是非常优越的,它不仅包含了双眼,还包括了大脑,可以从很复杂的景物中分开并识别每个物体,甚至可以毫不费力的跟上每秒好几十帧变化的图象。举两个例子来说明一下人类视觉系统的优越性: 图1是单词THE,这一点很容易看出来,但仔细观察一下,就会发现,图中少了很多线条。在我们人类看来很简单的一件事,让计算机来做就很困难了。 图2中尽管没有任何线条,但我们还是可以很容易的看出中间存在着一个白色三角形。计算机却很难发现。 由于人类在观察图象中应用了大量的知识,所以没有任何一台计算机在分割和检测真实图象时,能达到人类视觉系统的水平。正因为如此,对于大部分图象应用来说,自动分割与检测还是一个将来时,目前只有少数的几个领域(如印刷体识别OCR)自动识别达到了实用的水平。假想在一场足球比赛的录象中,我们希望可以输入命令,由计算机自动搜索出所有射门的镜头并显示在屏幕上,但目前,我们能从一幅图象中获得的信息只是每个像素的颜色或灰度值,除此以外别无其它,完成上述功能实在是太困难了。所以说解决图象分割和检测最根本的方法是在编码(成像)时就给予考虑。这也正是MPEG4及未来的视频压缩编码标准的主要工作。 针对上述困难,现在提出了三种算法:投影法,差影法和模板匹配。 1、投影法 怎样从华盛顿纪念碑图中自动检测到水平方向上纪念碑的位置。 仔细观察,不难发现,纪念碑上像素的灰度都差不多而且与众不同,如果我们选取合适的阈值,做削波处理(这里选175到220),将该图二值化,如下图所示: 图1. 削波处理,将图二值化图2. 图4做竖直方向投影