计算机视觉第八次作业
第十一章 立体视觉
习题
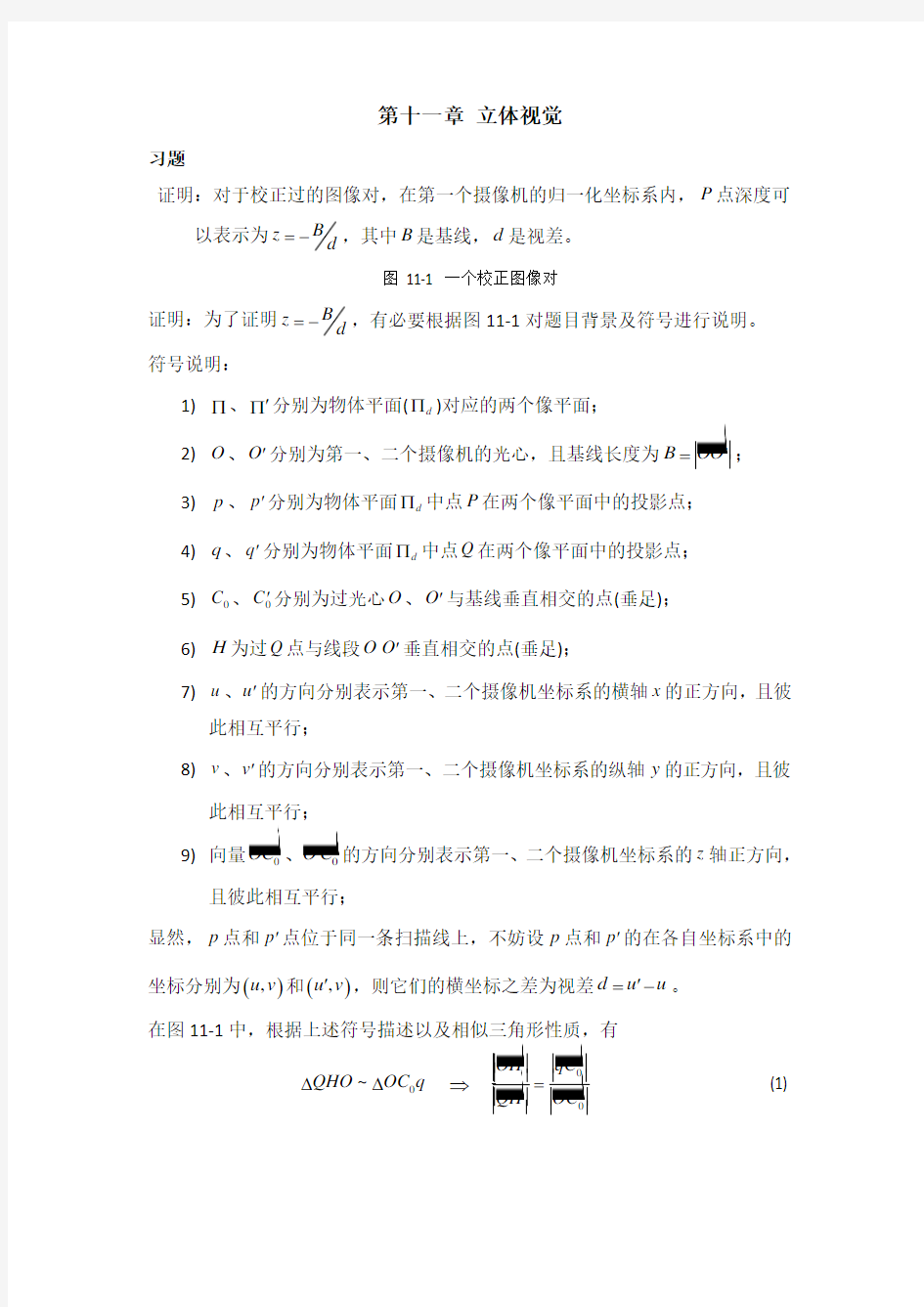
证明:对于校正过的图像对,在第一个摄像机的归一化坐标系内,P 点深度可
以表示为B z d
=-,其中B 是基线,d 是视差。
图 11-1 一个校正图像对
证明:为了证明B z d =-,有必要根据图11-1对题目背景及符号进行说明。
符号说明:
1) ∏、'∏分别为物体平面(d ∏)对应的两个像平面;
2) O 、O '分别为第一、二个摄像机的光心,且基线长度为B OO '=; 3) p 、p '分别为物体平面d ∏中点P 在两个像平面中的投影点; 4) q 、q '分别为物体平面d ∏中点Q 在两个像平面中的投影点;
5) 0C 、0
C '分别为过光心O 、O '与基线垂直相交的点(垂足); 6) H 为过Q 点与线段O O '垂直相交的点(垂足);
7) u 、u '的方向分别表示第一、二个摄像机坐标系的横轴x 的正方向,且彼
此相互平行;
8) v 、v '的方向分别表示第一、二个摄像机坐标系的纵轴y 的正方向,且彼
此相互平行;
9) 向量0OC 、0
O C ''的方向分别表示第一、二个摄像机坐标系的z 轴正方向,且彼此相互平行;
显然,p 点和p '点位于同一条扫描线上,不妨设p 点和p '的在各自坐标系中的坐标分别为(),u v 和(),u v ',则它们的横坐标之差为视差d u u '=-。 在图11-1中,根据上述符号描述以及相似三角形性质,有 0~QHO OC q ?? ?
00
OH qC QH
OC =
(1)
~QHO O C q ''''?? ? 00
O H q C QH
O C '''=
'' (2)
(1)式与(2)相加得
000
OO qC q C QH
OC O C '''=
+
'' (3)
又因为在第一个摄像机位于归一化坐标系中,即 00
1OC O C ''==; 基线B OO '=,QH z =-,0qC u =-,0q C u '''=,代入(3)式得 证毕。
证明当两个窗口的图像亮度可以用一个仿射变换I I λμ'=+相联系时,相关函
数达到最大值1,其中λ和μ为某个常数,0λ>。 证明:考虑两幅图像I 和I ',分别用向量()12,,
,T
p w w w w =和()
1
2,,,T
p w w w w ''''=表示。其中,w 、p w R '∈,()()2121p m n =+?+,m 和n 为正整数。则归一化相关函数可以表示为
显然,为使()max 1C d =,则当且仅当向量w w -与向量w w ''-之间的夹角为
零时,即()
,0w w w w λλ''-=->则 或
w w λμ'=+,,0w w μλλ'=->
所以当两个窗口的图像亮度可以用一个仿射变换I I λμ'=+相联系时,相关函数达到最大值1,其中λ和μ为某个常数,0λ>。
证毕。
西电计算机视觉大作业
数字水印技术 一、引言 随着互联网广泛普及的应用,各种各样的数据资源包括文本、图片、音频、视频等放在网络服务器上供用户访问。但是这种网络资源的幵放也带了许多弊端,比如一些用户非法下载、非法拷贝、恶意篡改等,因此数字媒体内容的安全和因特网上的侵权问题成为一个急需解决的问题。数字水印作为一项很有潜力的解决手段,正是在这种情况下应运而生。 数字水印(技术是将一些代表性的标识信息,一般需要经过某种适合的变换,变换后的秘密信息(即数字水印),通过某种方式嵌入数字载体(包括文档、音频、软件等)当中,但不影响原载体的使用价值,也不容易被人的知觉系统(如视觉或听觉系统)觉察或注意到。通过这些隐藏在载体中的信息,可以达到确认内容创建者、购买者、传送隐秘信息或者判断载体是否被篡改等目的。在发生产权和内容纠纷时,通过相应的算法可以提取该早已潜入的数字水印,从而验证版权的归属和内容的真伪。 二.算法原理 2.1、灰度图像水印 2.1.1基本原理 处理灰度图像数字水印,采用了LSB(最低有效位)、DCT变换域、DWT变换域三种算法来处理数字水印。在此过程中,处理水印首先将其预处理转化为二值图像,简化算法。 (1)LSB算法原理:最低有效位算法(Least Sig nificant Bit , LSB)是很常见的空间域信息隐藏算法, 该算法就是通过改变图像像素最不重要位来达到嵌入隐秘信息的效果, 该方法隐藏的信息在人的肉眼不能发现的情况下, 其嵌入方法简单、隐藏信息量大、提取方法简单等而获得广泛应用。LSB 信息嵌入过程如下: S′=S+f S ,M 其中,S 和S′分别代表载体信息和嵌入秘密信息后的载密信息;M为待嵌入的秘密信息, 而隐写分析则是从S′中检测出M以至提取M 。 (2)DCT算法原理:DCT 变换在图像压缩中有很多应用,它是JPEG,MPEG 等数据
西电数据挖掘大作业k-means和k-medoids
题 目: 数据挖掘 学 院: 电子工程学院 专 业: 智能科学和技术 学生姓名: ** 学 号: 02115*** k -means 实验报告 一、 waveform 数据 1、 算法描述 1. 从数据集{X n }n?1N 中任意选取k 个赋给初始的聚类中心c 1, c 2, …,
c k; 2.对数据集中的每个样本点x i,计算其和各个聚类中心c j的欧氏 距离并获取其类别标号: label(i)=arg min ||x i?c j||2,i=1,…,N,j=1,…,k 3.按下式重新计算k个聚类中心; c j=∑x j s:label(s)=j j ,j=1,2,…k 重复步骤2和步骤3,直到达到最大迭代次数为止2、实验结果 二、图像处理 1、算法描述 同上; 2、实验结果
代码: k_means: %%%%%%%%%K_means%%%%%%%% %%%%%%%%%函数说明%%%%%%%% %输入: % sample——样本集; % k ——聚类数目; %输出: % y ——类标(从0开始) % cnew ——聚类中心 % n ——迭代次数 function [y cnew n]=k_means(sample,k) [N V]=size(sample); %N为样本的个数 K为样本的维数 y=zeros(N,1); %记录样本类标 dist=zeros(1,k); rand_num=randperm(N); cnew=(sample(rand_num(1,1:k),:));%随机初始化聚类中心cold=zeros(k,V); n=0;
大学计算机基础作业参考
大学计算机基础作业参考-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
大学计算机基础作业 1、以下关于BIOS芯片的说法中,不正确的是( D )。 A.它实际是一组被固化在ROM芯片上的程序 B.它为计算机提供最低级、最直接的硬件控制与支持 C.它是一块被装入了计算机启动和自检程序的集成块 D.它由主机电源进行供电 2、在Windows 7中,账户类型不包括(CA )。 A. 管理员账户 B. 标准用户账户 C. 特权账户 D. 来宾用户 3、电子邮件服务中,发送邮件使用的是( B )协议。 A.SMTP B.POP3 C.FTP D.HTTP 4、在Word 2010中,目录可以通过( B )功能区进行插入。 A.页面布局 B.引用 C.插入 D.视图 5、在Word 2010中,如果用户希望以不同文件名存储一份正在编辑的文档, 应该使用( B )命令。 A.保存 B.另存为 C.保存并发送 D.新建 6、在Excel 2010中,打开“单元格格式”的快捷键是( D )。 A. Ctrl + Shift + B B. Ctrl + Shift + F C. Alt + Shift + G D. Alt + Shift + H 7、下列关于Excel 2010打印工作簿的表述中,错误的是( B ) A.一次可以打印整个工作薄 B.一次可以打印一个工作簿中的一个或多个工作表 C.在一个工作表中可以只打印某一页 D.不能只打印一个工作表中的一个区域位置 8、PowerPoint 2010演示文稿的文件扩展名是( C )。 A..ppt B..pptx C..pps D..pptm
计算机视觉第八次作业
计算机视觉第八次作业 Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
第十一章 立体视觉 习题 证明:对于校正过的图像对,在第一个摄像机的归一化坐标系内,P 点深度可 以表示为B z d =-,其中B 是基线,d 是视差。 图 11-1 一个校正图像对 证明:为了证明B z d =-,有必要根据图11-1对题目背景及符号进行说明。 符号说明: 1) ∏、'∏分别为物体平面(d ∏)对应的两个像平面; 2) O 、O '分别为第一、二个摄像机的光心,且基线长度为B OO '=; 3) p 、p '分别为物体平面d ∏中点P 在两个像平面中的投影点; 4) q 、q '分别为物体平面d ∏中点Q 在两个像平面中的投影点; 5) 0C 、0 C '分别为过光心O 、O '与基线垂直相交的点(垂足); 6) H 为过Q 点与线段O O '垂直相交的点(垂足); 7) u 、u '的方向分别表示第一、二个摄像机坐标系的横轴x 的正方向,且 彼此相互平行; 8) v 、v '的方向分别表示第一、二个摄像机坐标系的纵轴y 的正方向,且 彼此相互平行; 9) 向量0OC 、0 O C ''的方向分别表示第一、二个摄像机坐标系的z 轴正方向,且彼此相互平行; 显然,p 点和p '点位于同一条扫描线上,不妨设p 点和p '的在各自坐标系中的坐标分别为(),u v 和(),u v ',则它们的横坐标之差为视差d u u '=-。 在图11-1中,根据上述符号描述以及相似三角形性质,有
0~QHO OC q ?? ? 00OH qC QH OC = (1) ~QHO O C q ''''?? ? 0 O H q C QH O C '''= '' (2) (1)式与(2)相加得 000 OO qC q C QH OC O C '''= + '' (3) 又因为在第一个摄像机位于归一化坐标系中,即 00 1OC O C ''==; 基线B OO '=,QH z =-,0qC u =-,0q C u '''=,代入(3)式得 证毕。 证明当两个窗口的图像亮度可以用一个仿射变换I I λμ'=+相联系时,相关函 数达到最大值1,其中λ和μ为某个常数,0λ>。 证明:考虑两幅图像I 和I ',分别用向量()12,, ,T p w w w w =和 ()1 2,,,T p w w w w ''''=表示。其中,w 、p w R '∈,()()2121p m n =+?+,m 和n 为正整数。则归一化相关函数可以表示为 显然,为使()max 1C d =,则当且仅当向量w w -与向量w w ''-之间的夹角 为零时,即() ,0w w w w λλ''-=->则 或 w w λμ'=+,,0w w μλλ'=-> 所以当两个窗口的图像亮度可以用一个仿射变换I I λμ'=+相联系时,相关函数达到最大值1,其中λ和μ为某个常数,0λ>。 证毕。
北邮模式识别课堂作业答案(参考)
第一次课堂作业 1.人在识别事物时是否可以避免错识 2.如果错识不可避免,那么你是否怀疑你所看到的、听到的、嗅 到的到底是真是的,还是虚假的 3.如果不是,那么你依靠的是什么呢用学术语言该如何表示。 4.我们是以统计学为基础分析模式识别问题,采用的是错误概率 评价分类器性能。如果不采用统计学,你是否能想到还有什么合理地分类 器性能评价指标来替代错误率 1.知觉的特性为选择性、整体性、理解性、恒常性。错觉是错误的知觉,是在特定条件下产生的对客观事物歪曲的知觉。认知是一个过程,需要大脑的参与.人的认知并不神秘,也符合一定的规律,也会产生错误 2.不是 3.辨别事物的最基本方法是计算 . 从不同事物所具有的不同属性为出发点认识事物. 一种是对事物的属性进行度量,属于定量的表示方法(向量表示法 )。另一种则是对事务所包含的成分进行分析,称为定性的描述(结构性描述方法)。 4.风险 第二次课堂作业 作为学生,你需要判断今天的课是否点名。结合该问题(或者其它你熟悉的识别问题,如”天气预报”),说明: 先验概率、后验概率和类条件概率 按照最小错误率如何决策 按照最小风险如何决策 ωi为老师点名的事件,x为判断老师点名的概率 1.先验概率: 指根据以往经验和分析得到的该老师点名的概率,即为先验概率 P(ωi ) 后验概率: 在收到某个消息之后,接收端所了解到的该消息发送的概率称为后验概率。 在上过课之后,了解到的老师点名的概率为后验概率P(ωi|x) 类条件概率:在老师点名这个事件发生的条件下,学生判断老师点名的概率p(x| ωi ) 2. 如果P(ω1|X)>P(ω2|X),则X归为ω1类别 如果P(ω1|X)≤P(ω2|X),则X归为ω2类别 3.1)计算出后验概率 已知P(ωi)和P(X|ωi),i=1,…,c,获得观测到的特征向量X 根据贝叶斯公式计算 j=1,…,x
西电《软件技术基础》上机大作业答案解析
说明 每个实验题目含有一个main函数和一些函数,与实验题目相关的基本运算的函数定义和main函数定义的代码在附录以及对应的文件夹中给出,供上机实验参考使用。对于每个题目,只需要根据题目要求设计算法,补充函数定义,然后对程序进行编译、调试。
实验一线性表 一、实验目的 1.熟悉线性表的顺序和链式存储结构 2.掌握线性表的基本运算 3.能够利用线性表的基本运算完成线性表应用的运算 二、实验内容 1.设有一个线性表E={e1, e2, … , e n-1, e n},设计一个算法,将线性表逆置,即使元素排列次序颠倒过来,成为逆线性表E’={ e n , e n-1 , … , e2 , e1 },要求逆线性表占用原线性表空间,并且用顺序表和单链表两种方法表示,分别用两个程序来完成。(文件夹:顺序表逆置、单链表逆置) 2.已知由不具有头结点的单链表表示的线性表中,含有三类字符的数据元素(字母、数字和其他字符),试编写算法构造三个以循环链表表示的线性表,使每个表中只含有同一类的字符,且利用原表中的结点空间,头结点可另辟空间。(文件夹:分解单链表) 实验二栈和队列 一、实验目的 1.熟悉栈和队列的顺序和链式存储结构 2.掌握栈和队列的基本运算 3.能够利用栈和队列的基本运算完成栈和队列应用的运算 二、实验内容 1.设单链表中存放有n个字符,试编写算法,判断该字符串是否有中心对称的关系,例如xyzzyx是中心对称的字符串。(提示:将单链表中的一半字符先依次进栈,然后依次出栈与单链表中的另一半字符进行比较。)(文件夹:判字符串中心对称) 2.假设以数组sequ[m]存放循环队列的元素,同时设变量rear和quelen 分别指示循环队列中队尾元素的位置和内含元素的个数。编写实现该循环队列的入队和出队操作的算法。 提示:队空的条件:sq->quelen==0;队满的条件:sq->quelen==m。(文件夹:循环队列)实验三串 一、实验目的 1.熟悉串的顺序存储结构 2.掌握串的基本运算及应用 二、实验内容 1.串采用顺序存储结构,编写朴素模式匹配算法,查找在串中是否存在给定的子串。(文件夹:模式匹配) 2.若S是一个采用顺序结构存储的串,利用C的库函数strlen和strcpy(或strncpy)编写
超星2018大学计算机基础答案(修正版)
超星2018大学计算机基础答案 (修正版) 电子计算机的诞生 1物理器件采用晶体管的计算机称为第()代计算机。A、一 B、二C、三D、四正确答案:B 2时至今日,计算机仍采用存储程序原理,原理的提出者是()。 A、莫尔 B、冯.诺依曼 C、比尔.盖茨 D、图灵 正确答案:B 3计算机科学的奠基人是()。A、查尔斯.巴贝奇B、莫奇利和埃克特 C、阿兰.图灵D、冯.诺依曼 正确答案:C 4世界上第一台电子计算机诞生于()年。A、1939 B、1946 C、1952 D、 1958 正确答案:B 5计算机的发展经历了 4个时代,各个时代划分的原则是根据()。
A、计算机所采用的电子器件 B、计算机的运算速度 C、程序设计语言 D、计算机的存储量 正确答案:A 6 ()是现代计算机的雏形。 A、查尔斯.巴贝奇于1834年设计的分析机 B、宾夕法尼亚大学于 1946 年2月研制的ENIAC C、冯.诺依曼小组研制的 EDVAC D、阿兰.图灵建立的图灵机模型 正确答案:A 计算机系统的发展 1下列()是衡量微处理器的主要指标。A、主频B、字长C、速度D、工 艺正确答案:A , C 2计算机系统的发展趋势不包括()。A、巨型化B、微型化C、智能化D、复合化正确答案:D 3将CPU集成在一块芯片上所形成的元器件称为()A、微处理器B、ROM C、CMOS D、Cache 正确答案:A 4下列()不属于输入设备。 A、扫描仪B、键盘C、硬盘D、体感设备正确答案:C 5负责解释和执行程序的部件称为()。A、内存B、中央处理单元C、输入设备D、输出设备正确答案:B 6下面对计算机特点的说法中,不正确的是()。A、运算速度快B、计算精度高C、具有逻辑判断能力 D、随着计算机硬件设备及软件的不断发展和提高[其价格也越来越高正确答案:D
SQL数据库期末大作业
学校:北京联合大学 系别:信息管理系 姓名:孙超 学号:2013110444006 《餐饮业信息管理系统的开发》 1、本项目的需求分析 随着今年来中国餐饮行业的日益火爆,在强烈的行业竞争中,一个高效的餐饮信息管理系统的应用,无疑是至关重要的。高效,便捷的管理系统,不仅仅极大的方便了食客的就餐,同时对于餐饮公司的各项信息管理有着很大的帮助,同时,我们的餐饮信息管理系统还能帮助餐厅降低错误率,扩大营业范围,增加知名度等。 为了使得系统在操作的过程中,更加便捷,具有针对性,本次系统设计主要分为:员工登陆操作信息系统,以及店主操作管理信息系统。不同的设计从而达到不同的功能,实现信息的有效传达与管理。 第一:在员工使用本餐饮信息管理系统应可以实现以下功能: 1.添加修改查询客户会员信息(修改客户信息需客户确认) 2.查询菜单 3.添加查询预定信息,为老顾客打折 4.客户可以在自己的会员账户里充值 5.顾客可以用现金买单也可以从会员账户里扣取 第二:管理员使用本餐饮信息管理系统应可以实现以下功能: 1.添加修改查询客户会员信息(修改客户信息需客户确认) 2.添加修改查询菜单信息,最好能看到菜品图片 3.添加查询预定信息,为老顾客打折 4.客户可以在自己的会员账户里充值 5.顾客可以用现金买单也可以从会员账户里扣取 6.设定具体的打折方法 7.添加职员信息,权限也可以定为管理员。 8.可以查询使用者的现金收款金额。 二、餐饮业管理数据库管理系统的E-R模型(概念结构设计) 1.用户(员工)的信息:
编号、密码、类型、姓名、电话、收款金额 2.客户信息: 用户编号、客户编号、姓名、电话、密码、开卡时间、卡内余额 3.食谱: 类型、名称、价格、配料、照片 4.预定: 用户编号、日期、预定时间、客户姓名、类型、预定食谱、桌号5桌台管理: 桌号、使用情况、 6.点餐管理: 用户编号、类型、菜品、数量、价格、照片 7.盈利管理: 日期、日支出金额、店内收入、外卖收入、盈利额度 各对象之间的联系图: 用户E-R图 主要存储一些用户信息,如用户的账号、密码和类型地点等等,主要用于用户登录,添加客户和添加预定时会使用到用户信息。
大学计算机基础试题及答案完整版
大学计算机基础试题及答案完整版 一、单选题 1、完整的计算机系统由(C)组成。 A、运算器、控制器、存储器、输入设备和输出设备 B、主机和外部设备 C、硬件系统和软件系统 D、主机箱、显示器、键盘、鼠标、打印机 2、以下软件中,(D)不是操作系统软件。 A、Windowsxp B、unix C、linux D、microsoft office 3、用一个字节最多能编出(D)不同的码。 A. 8个 B. 16个 C. 128个 D. 256个 4、任何程序都必须加载到(C)中才能被CPU执行。 A. 磁盘 B. 硬盘 C. 内存 D. 外存 5、下列设备中,属于输出设备的是(A)。 A、显示器 B、键盘 C、鼠标 D、手字板 6、计算机信息计量单位中的K代表(B)。 A. 102 B. 210 C. 103 D. 28 7、RAM代表的是(C )。 A. 只读存储器 B. 高速缓存器 C. 随机存储器 D. 软盘存储器。(A)机计算的CPU的两大部件是8、组成器和寄存器 B. 控制器运A、算器和控制存和内 D. 控制器C、运算器和内存 )。中bps表示的是(D述9、在描信息传输数每秒传输的指令、、每秒传输的字节数 BA 传每秒输的位数字数 D、的C、每秒传输)的容量。容算机的内存量主要指(A 微10、型计B.ROM A.RAM D.Cache C.CMOS )。D 对应的二进制数为( 11、十进制数27B. 1100 A.1011 D. 11011 C. 10111 的是(A)。构12、Windows的目录结采用构线形结 A、树形结构 B、结构层次结构 D、网状C、)。D将原时件还原,被还的文件回到(文中收将13、回站的中”档文的我“、B 上面桌、A. C、内存中 D、被删除的位置 14、在Windows 的窗口菜单中,若某命令项后面有向右的黑三角,则表示该命令项(A)。 A、有下级子菜单 B、单击鼠标可直接执 C、双击鼠标可直接执行 D、右击鼠标可直接执行
计算机视觉应用专题报告
二、技术应用场景及典型厂商分析 1.计算机视觉技术已应用于传统行业和前沿创新,安全/娱乐/营销成最抢先落地的商业化领域 计算机视觉技术已经步入应用早期阶段,不仅渗透到传统领域的升级过程中,还作为最重要的基础人工智能技术参与到前沿创新的研究中。 本报告将重点关注技术对传统行业的影响。其中,计算机对静态内容的识别应用主要体现在搜索变革和照片管理等基础服务层面,意在提升产品体验;伴随内容形式的变迁(文字→图片→视频),动态内容识别的需求愈加旺盛,安全、娱乐、营销成为最先落地的商业化领域。 Analysys易观认为,这三类领域均有一定的产业痛点,且均是视频内容产出的重地,数据体量巨大,适合利用深度学习的方式予以改进。与此同时,行业潜在的商业变现空间也是吸引创业者参与的重要原因。 另一方面,当前计算机视觉主要应用于二维信息的识别,研究者们还在积极探索计算机对三维空间的感知能力,以提高识别深度。
2.计算机视觉的应用从软硬件两个层面优化安防人员的作业效率和深度 安防是环境最为复杂的应用领域,通常的应用场景以识别犯罪嫌疑人、目标车辆(含套牌车/假牌车)以及真实环境中的异常为主。 传统安防产品主要功能在于录像收录,只能为安防人员在事后取证的环节提供可能的线索,且需要人工进行反复地逐帧排查,耗时耗力;智能安防则是将视频内容结构化处理,通过大数据分析平台进行智能识别搜索,大大简化了工作难度,提高工作效率。 除此之外,在硬件层面上,传统安防产品超过4-5米的监控内容通常无法达到图像识别的像素要求,并容易受复杂环境中光影变化和移动
遮挡的影响而产生信息丢失,因此计算机会出现大量的误报漏报,这些局限为治安工作造成了一定的阻碍。 安防技术厂商在此基础上进行了创新,以格灵深瞳为例,目前已将摄像头的有效识别距离稳定至70-80米,同时开创了三维计算机视觉的应用,通过整合各类传感器达到类人眼的效果,减弱了环境对信息采集的负面影响,提高复杂环境下的识别准确度。 Analysys易观认为,计算机视觉的应用从行业痛点出发,以软硬件的方式大大优化了安防人员的作业效率与参考深度,是顺应行业升级的利好。不过,在实际应用过程中,对公安、交警、金融等常见安防需求方而言,更强的视觉识别效果往往意味着更多基础成本(存储、带宽等)的投入,安防厂商的未来将不只以技术高低作为唯一衡量标准,产品的实用性能与性价比的平衡才是进行突围、实现量产的根本,因此市场除了有巨大的应用空间外,还会引发一定的底层创新。
西电数据结构大作业
题目:数据结构上机报告学院:电子工程学院 专业:信息对抗技术 学生姓名:甘佳霖 学号:14020310092
西安电子科技大学 数据结构课程实验报告实验名称线性表 电子工程学院 1402031 班Array姓名甘佳霖学号 14020310092 同作者 实验日期 2017 年 3 月 18 日
实验一线性表 一、实验目的 1.熟悉线性表的顺序和链式存储结构 2.掌握线性表的基本运算 3.能够利用线性表的基本运算完成线性表应用的运算 二、实验要求 1.设有一个线性表E={e1, e2, … , e n-1, e n},设计一个算法,将线性表逆置,即使元素排列次序颠倒过来,成为逆线性表E’={ e n, e n-1 , … , e2 , e1 },要求逆线性表占用原线性表空间,并且用顺序表和单链表两种方法表示,分别用两个程序来完成。 2.已知由不具有头结点的单链表表示的线性表中,含有三类字符的数据元素(字母、数字和其他字符),试编写算法构造三个以循环链表表示的线性表,使每个表中只含有同一类的字符,且利用原表中的结点空间,头结点可另辟空间。 三、设计思路 1.顺序表做逆置操作时将对应的首尾元素位置交换,单链表的指针end指向链表的末尾,指针start指向链表头结点,指针s用来找到指向end节点的节点,将指向链表末尾和头结点的存储内容交换,然后头结点指针指向下一节点,s指针从start节点开始遍历寻找指向end 指针的节点,并将end指针赋值为s指针,就完成了单链表的逆置,可以看出单链表和顺序表都可以完成线性表的逆置。 2.分解单链表的实现思路是首先新建3个循环链表,然后顺序遍历单链表,ASCII码判断链表中的元素属于哪一类元素,然后将这个元素添加到对应的循环链表中,从而实现分解单链表的功能。 四、运行结果 1.单链表逆置:
大学计算机基础试题及答案(完整版)
大学计算机基础模拟题 一、单选题 1、完整的计算机系统由(C)组成。 A、运算器、控制器、存储器、输入设备和输出设备 B、主机和外部设备 C、硬件系统和软件系统 D、主机箱、显示器、键盘、鼠标、打印机 2、以下软件中,(D)不是操作系统软件。 A、Windowsxp B、unix C、linux D、microsoft office 3、用一个字节最多能编出(D)不同的码。 A. 8个 B. 16个 C. 128个 D. 256个 4、任何程序都必须加载到(C)中才能被CPU执行。 A. 磁盘 B. 硬盘 C. 内存 D. 外存 5、下列设备中,属于输出设备的是(A)。 A、显示器 B、键盘 C、鼠标 D、手字板 6、计算机信息计量单位中的K代表(B)。 A. 102 B. 210 C. 103 D. 28 7、RAM代表的是(C)。
A. 只读存储器 B. 高速缓存器 C. 随机存储器 D. 软盘存储器 8、组成计算机的CPU的两大部件是(A)。 A、运算器和控制器 B. 控制器和寄存器 C、运算器和内存 D. 控制器和内存 9、在描述信息传输中bps表示的是(D)。 A、每秒传输的字节数 B、每秒传输的指令数 C、每秒传输的字数 D、每秒传输的位数 10、微型计算机的内存容量主要指(A )的容量。 A.RAM B.ROM C.CMOS D.Cache 11、十进制数27对应的二进制数为( D )。 A.1011 B. 1100 C. 10111 D. 11011 12、Windows的目录结构采用的是(A)。 A、树形结构 B、线形结构 C、层次结构 D、网状结构 13、将回收站中的文件还原时,被还原的文件将回到(D)。 A、桌面上 B、“我的文档”中 C、内存中 D、被删除的位置
北邮模式识别课堂作业答案(参考)
第一次课堂作业 ? 1.人在识别事物时是否可以避免错识? ? 2.如果错识不可避免,那么你是否怀疑你所看到的、听到的、嗅到的到底 是真是的,还是虚假的? ? 3.如果不是,那么你依靠的是什么呢?用学术语言该如何表示。 ? 4.我们是以统计学为基础分析模式识别问题,采用的是错误概率评价分类 器性能。如果不采用统计学,你是否能想到还有什么合理地分类器性能评价指标来替代错误率? 1.知觉的特性为选择性、整体性、理解性、恒常性。错觉是错误的知觉,是在特定条件下产生的对客观事物歪曲的知觉。认知是一个过程,需要大脑的参与.人的认知并不神秘,也符合一定的规律,也会产生错误 2.不是 3.辨别事物的最基本方法是计算.从不同事物所具有的不同属性为出发点认识事物.一种是对事物的属性进行度量,属于定量的表示方法(向量表示法)。另一种则是对事务所包含的成分进行分析,称为定性的描述(结构性描述方法)。 4.风险 第二次课堂作业 ?作为学生,你需要判断今天的课是否点名。结合该问题(或者其它你熟悉的识别问题, 如”天气预报”),说明: ?先验概率、后验概率和类条件概率? ?按照最小错误率如何决策? ?按照最小风险如何决策? ωi为老师点名的事件,x为判断老师点名的概率 1.先验概率:指根据以往经验和分析得到的该老师点名的概率,即为先验概率P(ωi ) 后验概率:在收到某个消息之后,接收端所了解到的该消息发送的概率称为后验概率。 在上过课之后,了解到的老师点名的概率为后验概率P(ωi|x) 类条件概率:在老师点名这个事件发生的条件下,学生判断老师点名的概率p(x| ωi ) 2. 如果P(ω1|X)>P(ω2|X),则X归为ω1类别 如果P(ω1|X)≤P(ω2|X),则X归为ω2类别 3.1)计算出后验概率 已知P(ωi)和P(X|ωi),i=1,…,c,获得观测到的特征向量X 根据贝叶斯公式计算 j=1,…,x 2)计算条件风险
西电排队论大作业完整版
西电排队论大作业 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
西安电子科技大学 (2016年度) 随机过程与排队论 班级: XXXXXXX 姓名: XXX XXX 学号: XXXXXXXXXX XXXXXXXXXXX 一步转移概率矩阵收敛快慢的影响因素 作者姓名:XXX XXX 指导老师姓名:XXX (西安电子科技大学计算机学院,陕西西安) 摘要:根据课程教材《排队现象的建模、解析与模拟【西安电子科技大学出版 社曾勇版】》,第[马尔可夫过程]中,马尔可夫过程链n时刻的k步转移概率结 果,当k=1时,得到一步转移概率。进而得到一步转移概率矩阵P(1)。为研究 此一步转移概率矩阵(下称一步矩阵)的收敛特性以及影响其收敛快慢的因素,使 用MATLAB实验工具进行仿真,先从特殊矩阵开始做起,发现规律,然后向普通矩 阵进行拓展猜想,并根据算术理论分析进行论证,最终得出一步矩阵收敛快慢的影 响因素。 关键词:一步转移概率矩阵 MATLAB 仿真猜想 一、问题概述 我们讨论时一步矩阵的特性应从以下两方面来分析: (1)矩阵P(n)在满足什么条件时具有收敛特性; 对于矩阵P(n),当P(n)=P(n+1)时,我们说此矩阵 具有收敛特性,简称矩阵 P(n)收敛。 (2)若一个一步矩阵具有收敛特性,那么其收敛速度与什么有关
首先,我们需要明确什么是一步矩阵收敛: 对于一般的一步矩阵P 、矩阵An+1、矩阵An,若有: An+1=AnP=An 那么称该一步转移矩阵可收敛。 二、仿真实验 1、仿真环境 本次采用的是MATLAB仿真实验软件进行仿真实验 2、结果与分析 【1】、特殊矩阵:单位矩阵与类单位矩阵 从图(1)和图(2)可以看出,单位矩阵不具有收敛特性,类单位矩阵并非单位矩阵但是经过n次后也变为单位矩阵,所以此矩阵也不具有收敛特性。此类矩阵也易证明其不具有收敛性。 图(1)单位矩阵图(2):类单位 矩阵 【2】、一般单位矩阵 图(3):一般一步矩阵Ⅰ 图(4):一般一步矩阵 从图(3)和()可以看出他们分别在18次和4次后收敛到一个稳定的值 3、根据实验的猜想 根据在单位矩阵和一般单位矩阵和一般一步矩阵中得到的结果,可以对得出如下结论:类单位矩阵、单位矩阵是不具有收敛性的,而一般的一步矩阵是有收敛性的,而且收敛速率有快有慢。 对于上面结论中的状况,我们首先观察如上四个矩阵,不难发现,在矩阵收敛的最终结果矩阵中,其每行和均为1,而且每列上的值均为相同值。最终概率分布结果也是矩阵收敛后的一行。 所以根据上述的结果及分析做出如下猜想: 每一列比较均匀的矩阵收敛速度较快;与类单位矩阵类似的矩阵收敛速度较慢。 在极限情况下,有如下情况:
大学计算机基础试题与答案西安交通大学
《大学计算机基础试题及答案》西安交通大学 1. 计算机先后经历了以电子管、()、集成电路、大规模和超大规模集成电路为主要元器件的时代。 答案:晶体管 2. 计算机具有运算速度快、()、记忆和逻辑判断能力和计算机内部操作的自动化等特点。 答案:计算精度高 3. 基于冯.诺依曼思想设计的计算机,主要特点是()等。 答案:存储程序、程序控制 4. 可以将各种数据转换成为计算机能处理的数据形式并输送到计算机中的是()设备。 答案:输入 5. “计算机辅助设计”简称为()。 答案: CAD 6. 世界上首次提出存储程序的计算机体系结构的人是()。 答案:冯.诺依曼 7. 在计算机工作时,内存用来存储()。 答案:程序及中间数据 43. 微机中ROM的中文意思是()存储器。 答案:只读 44. RAM是()存储器。 答案:随机读写 45. Cache是()存储器。 答案:高速缓冲存储存 46. Cache、RAM、硬盘、软盘,存取速度最快的是()。 答案:Cache 47. 计算机硬件系统包括()和外部设备两部分。 答案:主机 48. 通常把控制器和运算器称为(),又叫CPU。 答案:中央处理机 49. 主机包括CPU和()。 答案:内存 50. 计算机硬件系统包括计算机主机和外部设备,显示器属于()。 答案:外部设备 51. 设置高速缓存的目的是为了解决CPU的运算速度和()的读写速度不平衡问题。 答案:内存 52. ()设备可以将各种数据转换成计算机能处理的形式并输送到计算机中。 答案:输入 53. 微型计算机硬件系统由微处理器、输入设备、输出设备和()组成。答案:存储器 54. 按照存储信息所使用的材料可将存储器分为()、磁存储器和光存储器
云南大学数据库期末大作业:数据库设计
云南大学软件学院实验报告 课程:数据库原理与实用技术实验学期:任课教师: 专业:学号:姓名:成绩: 期末大作业:Electronic Ventor 数据库设计 一、实验目的 (1)掌握数据库设计的基本方法 (2)掌握各种数据库对象的设计方法 (3)熟练掌握DBA必须具备的技能 二、实验内容 1、根据项目的应用和项目的需求说明文档,进行详细的需求分析,给出需求分析的结果。 (1)客户可以在网站上注册,注册的客户要提供客户的姓名、电话、地址,以方便售后和联系,姓名即作为用户名,和密码一起用于注册和登录,客户编号可唯一识别用户,卡号可网上支付。其中地址、电话以方便联系和寄货; (2)网站管理员可以登记各种商品,供客户查询,订购。登记商品时要提供商品的名称、价格,商店中现有商品量,商品编号可唯一识别商品; (3)类别表示商品所属类别,类别编号可唯一识别类别,其中包含了,商品类别名称和制造厂商,可以对商品进行分类售卖; (4)客户可以在网上下订单,也可以到实体店购物,其在订单上所选择的支付方式不同(信用卡、借记卡、现金,现金代表实体店购物),网站管理员可以查看订单,并及时将订单的处理情况更新(比如货物已寄出的信息,订单状态:0:未处理,1:已处理,2:已发货);订单编号可唯一识别订单,订单中包含订单产生时间,订单状态,支付方式和支付总额; (5)实体商店有自己的店名,卖多种商品,每个商店都有固定的地址,顾客可以到店中买商品,(注:在实体店中购买商品的顾客一律将顾客名默认为佚名),当商店中的库存量小于10时会有提醒到仓库中拿货; (6)配送单中包含查询号可唯一识别配送单,配送人,联系方式; (7)仓库中仓库编号可唯一识别仓库,其中每个仓库都有区号,代表其地址。 (8)各实体间关系 1)一个客户可以购买多种商品,一种商品可以被多个客户购买; 2)一个商品属于且仅属于一种类别,一种类别的商品可以包含多个商品或没有; 3)一种商品放在多个商店中销售,一个商店至少销售一种或销售多种商品; 4)一个订单对应一个客户,一个客户对应多个订单; 5)一个订单对应至少有一件商品或多件,一个商品对应多个订单; 6)一个订单可以有一个商品配送单 7)一个仓库可以存放多种商品,一种商品可以存放在一个仓库;
计算机视觉第二次作业实验报告
大学计算机视觉实验报告 摄像机标定 :振强 学号:451 时间:2016.11.23
一、实验目的 学习使用OpenCV并利用OpenCV进行摄像机标定,编程实现,给出实验结果和分析。 二、实验原理 2.1摄像机标定的作用 在计算机视觉应用问题中,有时需要利用二位图像还原三维空间中的物体,从二维图像信息出发计算三维空间物体的几何信息的过程中,三维空间中某点的位置与二维图像中对应点之间的相互关系是由摄像机的几何模型决定的,这些几何模型的参数就是摄像机参数,而这些参数通常是未知的,摄像机标定实验的作用就是通过计算确定摄像机的几何、光学参数,摄像机相对于世界坐标系的方位。 2.2摄像机标定的基本原理 2.2.1摄像机成像模型 摄像机成像模型是摄像机标定的基础,确定了成像模型才能确定摄像机外参数的个数和求解的方法。计算机视觉研究中,三维空间中的物体到像平面的投影关系即为成像模型,理想的投影成像模型是光学中的中心投影,也称为针孔模型。实际摄像系统由透镜和透镜组组成,可以由针孔模型近似模拟摄像机成像模型。 图2.1 针孔成像 2.2.2坐标变换 在实际摄像机的使用过程中,为方便计算人们常常设置多个坐标系,因此空间点的成像过程必然涉及到许多坐标系之间的相互转化,下面主要阐述几个重要坐标系之间的转换关系。
2.2.2.1世界坐标系--摄像机坐标系 图2.2 世界坐标系与摄像机坐标系空间关系 世界坐标系与摄像机坐标系之间的转换关系为: ????? ? ????????????=???? ????????111w w w T c c c Z Y X O T R Z Y X R 和T 分别是从世界坐标系到摄像机坐标系的旋转变换和平移变换系数,反映的是世界坐标系和摄像机坐标系之间的关系,因此称为外参数。 2.2.2.2物理坐标系--像素坐标系 图2.3 像素坐标系
《计算机图形学基础》第一次作业参考答案
《计算机图形学基础》第一次作业参考答案 一、名词解释 1、计算机图形学:是使用计算机通过算法和程序在显示设备上构造出图形来,是真实物体或虚构物体的图形综合技术。 2、图像处理:是景物或图象的分析技术,它所研究的是计算机图形学的逆过程。包括图象增强、模式识别、景物分析、计算机视觉等,并研究如何从图象中提取二维或三维物体的模型。 3、逐点比较法:这是绘图仪经常采用的一种方法,就是在绘图过程中,绘图笔每画一笔,就与规定图形进行比较,然后决定下一步的走向,用步步逼近的方法画出规定的图形。 4、造型技术:要在计算机中构造三维物体的一幅图像,首先必须在计算机中构造出该物体的模型,这一模型是由一批几何数据及数据之间的拓朴关系来表示,这就是造型技术。 二、简答 1、计算机图形系统的组成包括哪些? 答:计算机图形系统由硬件和软件两部分组成,硬件包括:主计算机、图形显示器以及I/O交互工具和存储设备;软件包括操作系统、高级语言、图形软件和应用软件。 现代计算机图形系统与一般计算机系统最主要的差别是具有图形的输入、输出设备以及必要的交互工具,在速度和存储容量上具有较高的要求。另外,人也是这个系统的组成部分。 2、简述图形软件的组成。 答:图形软件系统应该具有良好的结构,要有合理的层次结构的模块结构,以便于设计、维护和调试。 1、零级图形软件:是最底层的软件,主要解决图形设备与主机的通讯、接口等问题,又称设备驱动程序,是一些最基本的输入、输出子程序,要求程序质量高,它是面向系统的,而不是面向用户的。 2、一级图形软件:又称基本子程序,包括生成基本图形元素,对设备进行管理的各程序模块,既面向系统又面向用户。 3、二级图形软件:也称功能子程序,是在一级图形软件基础上编制的,其主要任务是建立图形数据结构,定义、修改和输出图形;以及建立各图形设备之间的联系,要具有较强的交互功能,它是面向用户的。(以上三级通常称为支撑软件) 4、三级图形软件:是为解决某种应用问题的图形软件,是整个应用软件的一部分,通常由用户编写或与设计者一起编写。 三、算法实现 写出Bresenham方法生成直线的C语言算法。 答案: int bres_line(int x1,int y1,int x2,int y2,int color) { int oldcolor,itag; int dx,dy,tx,ty,inc1,inc2,d,curx,cury; oldcolor=setcolor(color);
大学计算机基础第二章作业
一、单选题(每小题5分,共315分,得分300 分) 1、在启动WINDOWS时,桌面上会出现不同的图标。双击______图标可浏览计算机上的 所有内容。 A、收信箱 B、我的电脑 C、网络邻居 D、回收站 你的回答: B (√) 参考答案:B 2、在WINDOWS中,全角方式下输入的数字或英文字母应占的字节数是______。 A、1 B、2 C、3 D、4 你的回答: B (√) 参考答案:B 3、在Windows中移动窗口时,可将鼠标放在___________,然后拖动鼠标。 A、窗口内任意位置 B、窗口四角或四边 C、窗口标题栏上 D、窗口滚动条上 你的回答: C (√) 参考答案:C 4、在Windows中,当程序因为某种原因陷入死循环,下列中___________方法能较好地 结束该程序。 A、按Ctrl+Alt+Del键
B、按Ctrl+Del键 C、按Alt+Del键 D、直接Reset计算机结束该程序地运行 你的回答: A (√) 参考答案:A 5、在Windows中,要表示第三个字母为A,扩展名为txt的一类文件,正确的命名是: A、*A*.txt B、A*.txt C、**A.txt D、A.txt 你的回答: B (√) 参考答案:B 6、在Windows中,用户同时打开的多个窗口可以层叠式或平铺式排列,要想改变窗口的排列方式,应进行的操作是。 A、用鼠标右键单击“任务栏”空白处,然后在弹出的快捷菜单中选取要排列的方式 B、用鼠标右键单击桌面空白处,然后在弹出的快捷菜单中选取要排列的方式 C、打开“资源管理器”窗口,选择其中的“查看”菜单下的“排列图标”项 D、打开“我的电脑”窗口,选择其中的“查看”菜单下的“排列图标”项 你的回答: A (√) 参考答案:A 7、把Windows的窗口和对话框作一比较,窗口可以移动和改变大小,而对话框。 A、仅可以移动,不能改变大小 B、既不能移动,也不能改变大小 C、仅能改变大小,不能移动
大学计算机基础作业1
《大学计算机基础》第1-2周提交作业 学号:201410510308 姓名:李春明 完成日期:2014-10-02 一、文字录入,请在下方录入一篇800~1000字的文章,内容为介绍计算机发展史。从网络复制的不得分!计算机发展史 1945年,由美国生产了第一台全自动电子数字计算机“埃尼阿克”(英文缩写词ENIAC)。它是由美国奥伯丁武器实验为了满足弹道计算需要而研制成。主要发明人是电气工程师雷斯波.埃克和物理学家约翰.莫奇勒。这台计算机1946年产月交付使用,共服役9年。它采用电子管作为计算机的基本元件,每秒可进行5000次加减运算。它使用了18000只电子管,10000只电容,7000只电阻,体积3000立方英尺,占地170平方米,重量30吨。耗电140-150千瓦,是一个名副其实的庞然大物。ENIAC 的到来,在以后的多年里,计算机技术发展异常迅速,在人类科技史上没有一种科学可以一电子计算机的发展速度相提并论。 下面介绍各代计算机的硬件结构及系统的特点: 一、第一代(1946-1958):电子管数字计算机 计算机的逻辑元件采用电子管,主要存储采用汞延迟线、磁鼓、磁芯;外存储器采用磁带;软主要采用机器语言、汇编语言;应用以科学计算为主。其特点是体积大、耗电大、可靠性差、价格昂贵、维修复杂,但它奠定了以后计算机技术的基础。 二、第二代(1958-1964):晶体管数字计算机 晶体管的发明推动了计算机的发展,逻辑元件采用晶体管后,计算机的体积大大缩小,耗电减少,可靠性提高,性能比第一代计算机有很大提高。 主存储器采用磁芯,外存储器已开始使用更先进的磁盘;软件有了很大发展,出现了各种各样的高级语言及其编译程序,还出现了以批处理为主的操作系统,应用以科学计算和处理各种食物为主,并开始用于工业控制。 三、第三代(1964-1971):集成电路数字计算机 计算机的体积更小型化、耗电量更少、可靠性更高,性能比第二代计算机有了很大提高,这时,小型机也很快发展起来,应用领域日益扩大。 主存储器仍采用磁芯,软件逐渐完善,分时操作系统、会话式语言等多种高级语言都有新的发展。 四、第四代(1971年以后):大规模集成电路数字计算机 计算机的逻辑元件和主存储器都采用了大规模集成电路(LSI)。1971年世界上第一台微型处理器和卫星计算机在美国旧金山的硅谷诞生了,他开创了微型计算机的新时代。从此各种位处理器和微型计算机如雨后春笋般地研制出来,潮水般涌向市。特别是IBM-PC系列机诞生后,几乎统一了微机市场,各种各样的兼容机也相继问世。 微型机由于结构简单、通用性强、价格便宜,已成为现代计算机领域中一个极为重要的部分,并正义难以想象的速度向前发展。